| CATEGORII DOCUMENTE |
CONCEPTIA TEHNOLOGICA ASISTATA DE CALCULATOR
Consideratii generale
Facilitatea CIM aferenta conceptiei procesului tehnologic de executie a produsului este CAPP (Computer Aided Process Planning, Proiectare de proces asistata de calculator).
Proiectare procesului tehnologic cuprinde:
- elaborarea procesului tehnologic de grup pentru produse si componentele lor;
- stabilirea itinerarului tehnologic pentru fiecare produs si componentele sale (succesiunea operatiilor, fazelor, manuirilor. etc.);
- definirea (la nevoie proiectarea) masinilor de lucru, a sculelor, a dispozitivelor de lucru, a celor de transfer, a robotilor si a intregului echipament necesar procesului de fabricatie;
- stabilirea secventelor de transfer, de manipulare si de control;
- elaborarea documentelor aferente celor de mai sus precum sunt: Fise tehnologice, Lista materialelor necesare (MRP, Master Requirement Plan), etc.;
- Calculatii de cost, tinand seama de toate fazele procesului de productie.
Fluxul
de informatii in cadrul CAPP este organizat dupa schema din Fig. 8.1.
Operatorii umani se grupeaza in proiectanti de proces si proiectanti de dispozitive de lucru (DL) si scule (S). Ei lucreaza simultan si interactiv, utilizand baze de date, una referitoare la produs iar cealalta referitoare la mijloace de productie, fiind asistati in activitatea lor de calculator. Folosind limbaje superioare de programare a calculatoarelor, proiectantii elaboreaza prescriptii pentru procesul tehnologic, respectiv DL si S. Pe baza acestora proiectantul de operatii prescrie continutul fiecarei operatii, echipamentul necesar, regimurile si duratele de prelucrare, transfer, manipulare, control, etc. Rezultatele se consemneaza in forma de specificatii pentru dispozitive si scule, fiind deasemenea comunicate operatorilor umani si facilitatii CAM pentru elaborarea programelor piesa, respectiv a programelor pentru vehicule ghidate automat (AGV), instalatii aducatoare si de evacuare (IA /E), roboti industriali.
Activitatile in cadrul CAPP se realizeaza fie automat, fie de catre operatorii umani asistati de calculatoare in regim interactiv.
Procese tehnologice de grup
Se spune despre un proces tehnologic ca este flexibil, daca trecerea de la fabricatia unui produs la fabricatia altuia se realizeaza cu cheltuieli minime de manopera si de mijloace materiale. Pentru elaborarea unui proces tehnologic flexibil este necesara ca intre produsele de executat si componentele acestora sa existe niste inrudiri de caracteristici, care sa faciliteze trecerea amintita mai sus. In acest caz, tehnologia de executie se elaboreaza pentru intreaga grupa de produse inrudite. O asemenea tehnologie unitara este numita tehnologie de grup, sau proces tehnologic de grup. Tehnologiile de grup sunt fundamentale pentru functionarea sistemelor flexibile de fabricatie.
Ideea tehnologiilor de grup a fost fundamentata si dezvoltata intre anii 1950 - 1960 de catre inginerul rus Mitrofanov, pentru piese prelucrate prin aschiere. Ulterior principiul tehnologiei de grup s - a extins si asupra altor categorii de procese de fabricatie.
Exista mai multe criterii de formare a grupului de piese pentru care se pot elabora tehnologii de grup. Aceste criterii stabilesc caracteristicile de inrudire dupa:
- material (nu se pot introduce in aceeasi grupa obiecte din materiale diferite, de exemplu materiale plastice si otel);
- forma geometrica;
- dimensiuni (nu se pot include in aceeasi grupa piese foarte diferite dimensional, de exemplu un surub si un batiu de strung), grupele se formeaza din piese cu dimensiuni apropriate, deoarece numai astfel se poate asigura adecvarea lor la utilajele pe care urmeaza sa fie executate prelucrarile;
- precizia dimensionala (campul de tolerante);
- natura prelucrarilor (nu se pot include in aceeasi grupa piese care urmeaza sa fie asamblate prin sudare si piese care urmeaza sa fie confectionate prin prelucrari mecanice);
- calitatea suprafetei;
- alte criterii.
Pentru grupa alcatuita din piese, subansamble sau ansamble, se constituie 'produsul ideal'. Acesta contine o singura data caracteristicile comune, stabilite prin aplicarea criteriilor mentionate, cat si caracteristicile necomune ale produselor grupate.
Pentru a exemplifica modul de formare al produsului ideal, se prezinta in continuare o metoda matriciala. In acest exemplu s-au admis ca si criterii de grupare, formele geometrice ale pieselor si natura prelucrarilor necesare. In acest sens, produsele se considera piese din otel, care se prelucreaza prin aschiere. Desenele pieselor, formele geometrice simple componente si natura prelucrarilor cerute la executarea pieselor sunt specificate in Tab. 8.1. Enumerarea detaliilor s-a facut din stanga spre dreapta pieselor.
Tab. 8.1
|
Nr. crt. |
Desenul piesei |
Forme geometrice simple componente |
Mfk |
Natura prelucrarii prin aschiere |
Mpk |
|
I |
|
- trunchi de con ext. - cilindru exterior - cilindru int. transversal - trunchi de con ext. - calota sferica ext. |
|
- strunjire conica ext. - strunjire cilindrica ext. - gaurire - strunjire conica ext. - strunjire sferica - strunjire frontala |
|
|
II |
|
- trunchi de con ext. - cilindru exterior - degajare cilindrica ext. - cilindru exterior - trunchi de con ext. |
|
- strunjire conica ext. - strunjire cilindrica ext. - degajare cilindrica ext. - strunjire cilindrica ext. - strunjire conica ext. - strunjire frontala |
|
|
III |
|
- trunchi de con ext. - filet cilindric ext. - degajare cilindrica ext. - prisma patratica ext. - cilindru int. brut - cilindru int. fin - trunchi de con int. |
|
- strunjire conica ext. - filetare ext. - degajare cilindrica ext. - frezare plana 4 fete - gaurire - alezare - strunjire conica int. - strunjire frontala |
|
|
IV |
|
- cilindru ext. - cilindru int. brut - degajare cilindrica int. - cilindru int. brut - cilindru ext. |
|
- strunjire cilindrica ext. - gaurire - strunjire cilindrica int. - degajare cilindrica int. - strunjire frontala |
|
|
V |
|
- cilindru ext. - trunchi de con int. |
|
- strunjire cilindrica ext. - gaurire - strunjire conica int. - strunjire frontala |
|
Reunind
caracteristicile de forma ale celor 5 piese considerate, se intocmeste lista
caracteristicilor de forma a piesei ideale (Tab. 8.2). Reunind caracteristicile
tehnologice ale pieselor din grup, se intocmeste lista fazelor tehnologice
necesare pentru prelucrarea piesei ideale (Tab. 8.3).
Pentru fiecare piesa apartinatoare grupului se definesc doua matrici coloana, respectiv, o matrice a formei geometrice Mf si o matrice a prelucrarilor Mp.
Prin conventie, numarul de linii a matricii Mf se admite egal cu numarul formelor geometrice simple rezultate pentru piesa ideala (in exemplul discutat vor fi 11 linii). Elementele acestei matrici se considera egale cu '1', daca piesa contine forma elementara inscrisa pentru piesa ideala in linia respectiva a Tab. 8.2 si '0' daca nu contine. In Tab. 8.1 s-au redat matricile de forma pentru fiecare piesa in parte.
Similar se defineste matricea prelucrarilor Mp, cu numarul de linii egal cu numarul fazelor de prelucrare rezultate pentru piesa ideala (in exemplul discutat vor fi 12 linii). Elementele acestei matrici se considera egale cu '1', daca piesa respectiva necesita prelucrarea inscrisa pentru piesa ideala in linia respectiva a Tab. 8.3 si '0' daca nu necesita. In Tab. 8.1 s-au redat matricile de prelucrare pentru fiecare piesa in parte.
Matricea de forma Mfi a piesei ideale se calculeaza cu relatia:
![]() (8.1)
(8.1)
Intrucat elementele acestei matrici sunt mfj > 0, piesa ideala va contine toate formele geometrice simple care intervin la piesele grupei.
Matricea de prelucrare Mpi a piesei ideale poate fi calculata cu relatia:
![]() (8.2)
(8.2)
Elementele acestei matrici fiind mpj > 0, prelucrarea piesei ideale va necesita toate fazele tehnologice folosite in cazul prelucrarii individuale a pieselor din care s-a alcatuit grupa.
Calculul concret al matricii de forma a piesei ideale pentru grupa discutata este:
![]() (8.1
(8.1
Inlocuind matricile de forma ale pieselor luate in considerare in Tab. 8.1 se obtine:
 (8.1')
(8.1')
In mod similar se calculeaza matricea de prelucrare a piesei ideale:
![]() (8.2')
(8.2')
Inlocuind matricile de prelucrare din Tab. 8.1 pentru toate cele 5 piese ale grupei, rezulta:
 (8.2')
(8.2')
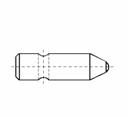
Ordinea in care apar formele geometrice simple in piesa ideala este determinata de posibilitatile de executare a acesteia (modul cum se realizeaza prinderea in dispozitive, accesul sculelor, etc.). Desenul piesei ideale corespunzatoare grupei de piese specificate in Tab. 8.1 si care este in acord cu relatiile (8.1'), respectiv (8.2') este redat in Fig. 8.2).
Evidentierea ordinii de amplasare a formelor geometrice simple la piesa
ideala poate fi facuta cu ajutorul unei matrici coloana ![]() , care are
ca si elemente numerele de ordine ale formelor simple cu semnificatiile din
Tab. 8.2, aranjate in succesiunea aparitiei lor pe piesa ideala.
, care are
ca si elemente numerele de ordine ale formelor simple cu semnificatiile din
Tab. 8.2, aranjate in succesiunea aparitiei lor pe piesa ideala.
Evidentierea ordinii de prelucrare prin aschiere a suprafetelor piesei
ideale poate fi facuta cu ajutorul unei matrici coloana ![]() , care
contine ca si elemente numerele de ordine ale liniilor specificate in Tab. 8.3,
asezate in succesiunea prelucrarilor piesei ideale.
, care
contine ca si elemente numerele de ordine ale liniilor specificate in Tab. 8.3,
asezate in succesiunea prelucrarilor piesei ideale.
In cadrul proiectarii procesului tehnologic de grup se aleg masinile si dispozitivele de lucru, sculele necesare, itinerarul tehnologic pentru prelucrarea piesei ideale, se calculeaza regimurile si timpii de prelucrare pentru piesa ideala.
Procesele tehnologice de prelucrare ale pieselor componente grupului se obtin din particularizarea procesului tehnologic de grup, neluand in considerare masinile, dispozitivele, sculele, regimurile si duratele de aschiere care nu sunt necesari pentru prelucrarea formelor geometrice ale piesei reale.
De preferinta, in procesele tehnologice de grup se utilizeaza dispozitive flexibile, concepute pentru piesa ideala, care se particularizeaza apoi pentru fiecare piesa din grup, ori prin reglaje, ori prin eliminarea componentelor care la operatia tehnologica respectiva nu sunt necesare.
Proiectarea automata si asistata de calculator a proceselor tehnologice
in cadrul facilitatii CAPP
Procesele tehnologice utilizate in sistemele de fabricatie flexibile sunt asemanatoare celor folosite in sistemele clasice. Ceea ce difera este conceptia flexibila derivata din tehnologia de grup si faptul, ca se realizeaza mai mult sau mai putin fara interventia fizica a omului.
Ceea ce este specific facilitatii CAPP este conceptia proceselor tehnologice de fabricatie cu ajutorul calculatorului, fara contributia operatorului uman, acesta intervenind doar in mod interactiv.
Proiectarea automata a succesiunii fazelor operatiilor tehnologice
Proiectarea automata a succesiunii fazelor operatiilor tehnologice va fi exemplificata pentru cazul unui proces de prelucrare prin aschiere. Se incepe cu prezentarea unei metode de determinare a succesiunii fazelor unei operatii de frezare cu ajutorul unui program bazat pe operatii booleene in doua variante.
Prima varianta poarta denumirea de metoda cojilor convexe. Se presupune ca piesa finita de obtinut are intr-o sectiune forma geometrica S0 iar semifabricatul, in aceeasi sectiune, are forma geometrica H0 (Tab. 8.4).
Tab. 8.4
|
Nr. crt. |
Notarea modelului sectiunii |
Scheme pentru ilustrarea metodei cojilor convexe |
Operatia booleana si observatii |
|
|
H0 |
Sectiune semifabricat |
|
|
|
S0 |
Sectiune produs |
|
|
|
S1 |
H0 - S0 |
|
|
|
H1 |
Coaja convexa a lui S1 |
|
|
|
S12 + S22 |
H1 - S1 |
Programul elaboreaza succesiunea fazelor unei operatii de frezare, urmarind ca pornind de la sectiunea H0 sa se ajunga la sectiunea S0. Prima operatie este o substractie booleana, in cadrul careia din H0 se scade S0 si rezulta adausul existent pe semifabricat, de forma S1. Programul circumscrie forma S1 cu un contur poligonal convex, de arie H1, care se denumeste coaja convexa. Cea de a doua operatie booleana este tot o substractie, in cadrul careia din H1 se elimina S1 si se obtine ca rezultat reuniunea a doua suprafete triunghiulare S12 + S22. Piesa finita se obtine indepartand din semifabricat coaja convexa, mai putin volumul corespunzator sectiunilor triunghiulare S12 + S22. Aceste operatii sunt exprimate prin urmatoarea relatie booleana:
![]() (8.5)
(8.5)
Programul bazat pe metoda cojii convexe permite operatorului sa introduca datele initiale prin specificarea formei sectiunii semifabricatului si a piesei finite, urmand ca in continuare calculatorul sa stabileasca automat succesiunea fazelor operatiei de frezare, astfel incat sa fie respectata relatia (8.5). Un avantaj al metodei cojii convexe este aceea, ca poate fi aplicata indiferent de forma sectiunii semifabricatului, aceasta poate fi, ca si in exemplul prezentat, o forma oarecare nestandardizata.
A doua varianta bazata pe operatii booleene, denumita metoda scaderilor succesive, se aplica semifabricatelor de sectiune standardizata. Succesiunea operatiilor de substractie necesare in acest caz este prezentata in Tab. 8.5.
Tab. 8.5
|
Nr. crt. |
Notarea modelului sectiunii |
Scheme pentru ilustrarea metodei cojilor convexe |
Operatia booleana si observatii |
|
|
S0 |
Sectiune produs |
|
|
|
H0 |
Sectiune semifabricat |
|
|
|
H1 |
H0 - S0 H11 + H12 |
|
|
|
H11 |
Dreptunghiul superior se defineste prin dimensiuni |
|
|
|
H12 |
H1 - H11 |
|
|
|
V |
H0 - H11 |
In acest caz, intre sectiunea piesei finite si sectiunea semifabricatului exista relatia:
![]() (8.6)
(8.6)
Alta metoda de elaborare automata a succesiunii fazelor intr-o operatie tehnologica este cea cunoscuta sub denumirea de metoda Andersen sau cea a celulelor. Aceasta metoda permite stabilirea automata a zonelor in care se prelucreaza prin degrosare si a celor in care se prelucreaza prin finisare, cu conditia ca ele sa fie realizabile prin frezare.
 Conturul piesei finite este alcatuit din segmente drepte
racordate cu arce de cerc (Fig. 8.3). Desenul conturului se introduce ca data
initiala. Calculatorul identifica automat punctele de trecere de la un
segment de contur la altul si traseaza
prin fiecare din aceste puncte o dreapta orizontala si una verticala. In acest
mod, conturul se incadreaza intr-un caroiaj.
Conturul piesei finite este alcatuit din segmente drepte
racordate cu arce de cerc (Fig. 8.3). Desenul conturului se introduce ca data
initiala. Calculatorul identifica automat punctele de trecere de la un
segment de contur la altul si traseaza
prin fiecare din aceste puncte o dreapta orizontala si una verticala. In acest
mod, conturul se incadreaza intr-un caroiaj.
Ariile cuprinse intre doua drepte orizontale alaturate si doua drepte verticale alaturate reprezinta celule dreptunghiulare. Celulele sunt de trei categorii:
- interioare, cand toate punctele celulei apartin piesei finite;
- exterioare, cand nici un punct al celulei nu apartine piesei;
- mixte, cand unele puncte ale celulei apartin piesei iar alte puncte nu apartin acesteia. Impartirea celulelor pe categorii este realizata de programul calculatorului.
La stabilirea succesiunii fazelor de executie programul tine cont de faptul, ca prelucrarea se efectueaza numai in zonele in care se gasesc amplasate celulele exterioare si cele mixte. Programul imparte celulele respective in straturi, corespunzator numarului de treceri in regim de degrosare care trebuie efectuate pentru a apropria taisului frezei de conturul dorit, lasand insa adaus de prelucrare si pentru faza de finisare. Acesta se indeparteaza la ultima trecere a frezei, cand taisul atinge conturul final.
A treia metoda pentru stabilirea automata a succesiunii fazelor de prelucrare este cea cunoscuta sub denumirea de metoda recunoasterii partilor caracteristice (features). Ea nu se refera numai la conceptia tehnologiei, ci are aplicabilitate mai generala in conceptia asistata de calculator. Partile caracteristice pot avea semnificatii functionale, de reprezentare, de modelare si de prelucrare.
In continuare se prezinta metoda elaborata de colectivul GARI (Grenoble Artificial Inteligente). Aceasta metoda este bazata pe un sistem expert, care urmareste stabilirea unor caracteristici de prelucrare denumite fete de intrare. La prelucrarea prin aschiere fetele de intrare reprezinta suprafetele semifabricatului, prin care scula aschietoare trebuie sa patrunda in material.
Sistemul expert stabileste in mod automat succesiunea operatiilor de prelucrare, prin alegerea succesiunii fetelor de intrare. El raspunde la intrebari de forma:
- Ce volum de material se indeparteaza?
- In ce succesiune?
Regulile sistemului expert sunt de genul:
- Daca la o suprafata prelucrarea 'x' se realizeaza pe masina de rectificat si prelucrarea 'y' pe masina de frezat, atunci prelucrarea 'y' trebuie sa precede prelucrarea 'x'.
Pentru exemplificare se prezinta modul in care se aleg succesiv fetele de intrare la prelucrarea unei piese S0, pornind de la semifabricatul H0 (Tab. 8.6). In semifabricatul paralelipipedic se prelucreaza un alezaj prismatic, un canal de pana de sectiune dreptunghiulara si un alezaj cilindric care leaga fundul canalului cu alezajul prismatic. Pentru stabilirea succesiunii fetelor de intrare a sculelor, sistemul expert identifica caracteristicile de prelucrare ale obiectului, asemanator cu metoda de calcul boolean.
Tab. 8.6
|
Nr. crt. |
Notarea modelului 3D |
Schemele formelor |
Operatia booleana si observatii |
|
|
H0 |
Semifabricatul |
|
|
|
V |
Volumul materialului de indepartat |
|
|
|
S0 |
Piesa finita H0 - V |
 Din
semifabricatul H0 se elimina volume (parti caracteristice), avand
formele unor corpuri geometrice simple 1, 2, 3 (Fig. 8.4). Aceasta eliminare se
realizeaza cu scula aschietoare, care patrunde in material printr-o fata de intrare EF (entrance face). Sistemul expert ierarhizeaza
fetele de intrare in primare (PEF)
si secundare (SEF). In cazul
exemplului este utilizata regula: 'Daca intr-un semifabricat se
preluc-reaza un canal de pana si in aceeasi suprafata se executa si o gaura,
atunci prima data se executa canalul, apoi gaura'. Ca urmare, pentru
corpul 2 rezulta o fata de intrare primara (PEF2) iar a doua fata de
intrare de aceeasi categorie (PEF2') rezulta implicit. La randul ei,
corpul 3 va avea o fata de intrare secundara (SEF3) iar fata (SEF3')
rezulta.
Din
semifabricatul H0 se elimina volume (parti caracteristice), avand
formele unor corpuri geometrice simple 1, 2, 3 (Fig. 8.4). Aceasta eliminare se
realizeaza cu scula aschietoare, care patrunde in material printr-o fata de intrare EF (entrance face). Sistemul expert ierarhizeaza
fetele de intrare in primare (PEF)
si secundare (SEF). In cazul
exemplului este utilizata regula: 'Daca intr-un semifabricat se
preluc-reaza un canal de pana si in aceeasi suprafata se executa si o gaura,
atunci prima data se executa canalul, apoi gaura'. Ca urmare, pentru
corpul 2 rezulta o fata de intrare primara (PEF2) iar a doua fata de
intrare de aceeasi categorie (PEF2') rezulta implicit. La randul ei,
corpul 3 va avea o fata de intrare secundara (SEF3) iar fata (SEF3')
rezulta.
Definirea corelata a geometriei sculei si a suprafetei prelucrate prin aschiere
prin conlucrarea interactiva a operatorului uman cu calculatorul
 Metoda
se bazeaza pe proprietatea potrivit careia o suprafata prelucrata prin aschiere
reprezinta infasuratoarea pozitiilor succesive ale muchiilor taietoare ale
sculei.
Metoda
se bazeaza pe proprietatea potrivit careia o suprafata prelucrata prin aschiere
reprezinta infasuratoarea pozitiilor succesive ale muchiilor taietoare ale
sculei.
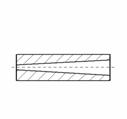
Daca in semifabricat urmeaza sa fie alezat un orificiu pregaurit (Fig. 8.5), atunci prin tehnica de modelare 3D, se elaboreaza pe ecranul calcula-torului atat modelul semifabricatului cat si al alezorului. Deplasand modelul alezorului fata de modelul semifabricatului prin procedeul maturarii (sweep), se obtine geometria alezajului sub forma infasuratoarei pozitiilor succesive ale taisurilor alezorului.
 Daca se
doreste modelarea prelucrarii unei suprafete interioare folosind o frez[ deget
(Fig. 8.6), se va deplasa modelul frezei in raport cu modelul semifabricatului
dupa profilul dorit, iar suprafata interioara se va genera ca si la procedeul sweep, rezultand ca o suprafata
'maturata' in modelul semifab-ricatului de muchiile taietoare ale frezei.
Alegand freze diferit profilate, se pot obtine geometrii diferite pentru
suprafetele de frezat.
Daca se
doreste modelarea prelucrarii unei suprafete interioare folosind o frez[ deget
(Fig. 8.6), se va deplasa modelul frezei in raport cu modelul semifabricatului
dupa profilul dorit, iar suprafata interioara se va genera ca si la procedeul sweep, rezultand ca o suprafata
'maturata' in modelul semifab-ricatului de muchiile taietoare ale frezei.
Alegand freze diferit profilate, se pot obtine geometrii diferite pentru
suprafetele de frezat.
Astfel, metoda descrisa permite stabilirea profilului sculei in corelatie cu geometria dorita a suprafetei de prelucrat.
Stabilirea miscarii relative a sculei fata de obiect
Deplasarea relativa a sculei fata de obiect, in cazul prelucrarii acestuia din urma prin aschiere, se realizeaza tot interactiv.
Pentru exemplificarea metodei, se considera operatia de prelucrare prin strunjire a unui arbore in trepte pornind de la un semifabricat cilindric (Fig. 8.7). Se presupune ca operatia are o faza de degrosare si una de finisare.
Miscarile sculei in raport cu semifabricatul, care trebuie sa fie realizate in timpul aschierii, se efectueaza dupa axa Oy (directia avansului longitudinal) si dupa axa Ox (directia avansului transversal), in sensurile negative. Pe ecranul calculatorului se vizualizeaza succesiunea imaginilor reproduse in Tab.8.7, in corespondenta cu sectiunea axiala a piesei in care lucreaza scula aschietoare (cutitul de strung) prin efectuarea miscarilor de avans longitudinale, respectiv transversale.
Tab. 8.7
|
Nr. |
Imaginea generata pe ecranul calculatorului |
Explicatii |
|
|
Piesa finita si semifabricatul, cu indicarea adausului de prelucrare. |
|
|
|
Traiectoriile descrise de punctul caracteristic P al sculei (varful cutitului de strung) la aschierea de degrosare, pe durata efectuarii a trei treceri si a curselor de revenire aferente. |
|
|
|
|
Traiectoria de lucru descrisa de punctul caracteristic al sculei aschietoare in timpul efectuarii fazei de finisare. |
Simularea miscarii sculei serveste la stabilirea coordonatelor punctelor de intrare si de iesire in / din aschiere la prelucrarea obiectului de strunjit pentru fiecare capat al curselor de trecere. Aceste coordonate se introduc apoi manual sau automat, cu ajutorul unor interfete adecvate, in 'programul piesa' CAM.
Pe baza simularii se verifica si evitarea coliziunii sculei cu piesa sau cu dispozitivul de lucru utilizat.
Deplasarea sculei in cursele de lucru se realizeaza cu avans constant dupa contur, deci modulul vitezei de avans a punctului caracteristic trebuie sa ramane constant.
Modelul geometric si simularea
prelucrarii sunt utilizate pentru corelarea miscarilor sculei in directiile
axelor OX si OY ale strungului. In Tab. 8.7 se prezinta graficele deplasarilor
de avans sX si sY efectuate de scula dupa cele doua axe,
respectiv, graficele vitezelor de avans ![]() si
si ![]() in aceleasi directii, pentru cazul prelucrarii
de finisare.
in aceleasi directii, pentru cazul prelucrarii
de finisare.
Pentru pastrarea constanta a vitezei de avans a punctului P la finisarea conturului piesei este necesar sa fie respectate egalitatile:
Tab.8.8
|
Nr. crt. |
Imaginile graficelor de deplasare si de viteza in faza strunjirii de finisare |
Explicatii |
|
|
Graficul deplasarii prin avans transversal. |
|
|
|
Graficul vitezei de avans transversal. |
|
|
|
Graficul deplasarii prin avans longitudinal. |
|
|
|
Graficul vitezei de avans longitudinal. |
|
|
|
Graficul vitezei unghiulare principale a dispozitivului universal. |
![]() (8.7)
(8.7)
unde cu indicii P1P2, P2P3 si P3P4 s-au notat intervalele de profil de-a lungul carora componentele avansului au diferite valori.
Din expresia vitezei principale de aschiere (viteza perpendiculara la planul OXY):
![]() (8.8)
(8.8)
se deduce viteza unghiulara necesara la arborele principal al strungului:
![]() (8.9)
(8.9)
Mentinerea constanta a vitezei principale de aschiere, cand distanta X(t) dintre varful sculei si axa de rotatie OY a strungului se modifica in timp, presupune reglarea continua a vitezei unghiulare a arborelui principal, astfel ca sa fie respectata relatia (8.7).
Modulele vitezelor de avans si cele ale vitezei unghiulare principale determinate prin modelare - simulare se introduc fie manual fie automat in 'programul piesa', care se elaboreaza in cadrul facilitatii CAM.
Proiectarea interactiva a unui dispozitiv de lucru
In cadrul facilitatii CAPP dispozitivele de lucru se proiecteaza asistat de calculator, utilizand modelarea geometrica 3D si grafica pe calculator.
Se prezinta spre exemplificare modul de proiectare interactiva al unui dispozitiv de lucru, care trebuie sa situeze un obiect paralelipipedic (BLOCK). Dispozitivul (Fig. 8.7) contine o placa de baza (PLATE), un reazem (PARALELL) si o piesa limitatoare (LIMIT).
 Programul de
proiectare trebuie sa fie scris intr-un limbaj specializat.
Programul de
proiectare trebuie sa fie scris intr-un limbaj specializat.
Comanda pentru asezarea rea-zemului pe placa de baza este:
A PARALELL on PLATE + di-
mensiuni.
Aceasta comanda genereaza pe ecran imaginea reazemului asezata pe placa de baza, in locul precizat prin intermediul dimensiunilor.
Urmatoarea comanda este:
B BLOCK on PARALELL + di-
mensiuni.
Acum apare pe ecran imaginea obiectului in locul stabilit prin dimensiunile introduse.
Urmeaza comanda:
C BLOCK on LIMIT Y.
In consecinta acestei comenzi, apare imaginea limitatorului pe placa de baza, avand fata Y sprijinita de obiect.
In sfarsit se da comanda:
D BLOCK on LIMIT X.
Aceasta comanda are ca efect translatarea imaginii piesei limitatoare pana cand fata de sprijin X ajunge in pozitie de tamponare cu obiectul.
Dand succesiv comenzile enumerate, toate componentele dispozitivului de lucru se amplaseaza in situarile necesare. Datele privitoare la configuratia geometrica a dispozitivului de lucru se transmit prin reteaua informationala la atelierul, unde se efectueaza asamblarea dispozitivului din parti prefabricate.
Programe specifice facilitatii CAPP
Conceptia proceselor tehnologice de fabricatie, realizata automat sau interactiv intre operatorul uman si calculatorul, se efectueaza folosind pachete de programe specifice facilitatii CAPP.
Aceste pachete de programe inlocuiesc cataloagele si manualele referitoare la procesele tehnologice de prelucrare, folosite in compartimentele clasice de proiectare tehnologica, cu bazele de date.
Informatiile cuprinse in bazele de date amintite se refera la:
- materiale, proprietatile si prelucrabilitatea acestora;
- masini unelte si utilaje, caracteristici constructive, functionale, tehnologice, precizia lor;
- dispozitive de lucru si cele ale instalatiilor aducatoare / de evacuare, constructie, structura, caracteristici functionale, precizie;
- regimuri de prelucrare, valori recomandate pentru viteze, avansuri, adancimi de aschiere, ungere / racire, etc.;
- scule, forme geometrice, materiale, durabilitati, etc.;
- roboti industriali, structuri, caracteristici constructive si functionale (sisteme de actionare, sisteme de comanda, efectori finali, curse pozitii extreme, viteze maxime pe diferite axe, spatii de lucru, sarcina utila, rigiditate, precizie);
- furnizori, adrese, preturi, costuri de transport, taxe vamale, conditii de livrare, etc.
O alta categorie de programe alcatuiesc sistemele expert. Ele permit selectarea materialelor, echipamentelor care concura la realizarea procesului tehnologic, stabilirea itinerarelor tehnologice, a succesiunii operatiilor de prelucrare, a fazelor, a numarului de treceri, a manuirilor, a operatiilor de transfer / manipulare, etc.
Totalitatea programelor referitoare la sistemele expert utilizate in proiectarea proceselor tehnologice constituie cea ce se numeste MES (Manufacturing Expert Systems, Sisteme expert pentru fabricatie). MES indeplineste pentru facilitatea CAPP acelasi rol pe care il are CAE pentru facilitatea CAD.
O alta categorie de programe cu care opereaza facilitatea CAPP sunt programele pentru calculul costurilor de productie. Cu ajutorul lor se determina costurile tuturor activitatilor care concura la realizarea unui produs.
Calculul costurilor se face analitic sau previzional.
Calculul analitic este un postcalcul, in cadrul caruia se insumeaza cheltuielile efective inregistrate dupa executarea unui lot de produse, iar suma se raporteaza la unitatea de produs.
Calculul previzional este de regula un calcul statistic. Calculele previzionale sunt necesare atunci cand trebuie facuta rapid o oferta de pret pentru un produs nou, care nu se regaseste in productia actuala sau trecuta.
Programele de calcul previzionale ale costurilor evalueaza acestea pe baza unor costuri postcalculate pentru produse similare sau asemanatoare cu produsul de evaluat, realizate in intreprinderea respectiva. Ca element de comparatie se ia greutatea produsului sau complexitatea lui (prin numarul de componente). Corelatiile cost - greutate sau cost - complexitate se pot apela din memoria calculatorului sub forma de diagrame sau tabele.
In Fig. 8.8 se prezinta grafice de variatie ale costurilor in functie de greutatea produsului cand acesta are in componenta structuri mecanice, sau electrice. Pentru greutatea estimata G a unitatii de produs marcata pe abscisa, se citeste pe ordonata, in dreptul curbei aferente tipului de produs, costul prevazut.
In Fig. 8.9 sunt prezentate grafice de variatie a costurilor unor instalatii hidraulice, respectiv structuri mecanice, in functie de numarul componentelor / produs. Pentru un numar de componente N, marcat pe abscisa, costurile se citesc pe ordonata in mod diferentiat dupa tipul produsului.
Calculatia costului se poate efectua partial analitic si partial statistic dupa incheierea activitatii de conceptie. Ca rezultat al acestei activitati se urmaresc consumurile de materiale si de manopera pe unitatea de produs, calculand analitic costurile aferente.
Costurile aferente altor sectoare decat activitatea de fabricatie se calculeaza deasemenea statistic pe anumite intervale de timp si se raporteaza la unitatea de produs, luand in considerare productia previzibila in intervalul respectiv de timp.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2540
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved