| CATEGORII DOCUMENTE |
| Astronomie | Biofizica | Biologie | Botanica | Carti | Chimie | Copii |
| Educatie civica | Fabule ghicitori | Fizica | Gramatica | Joc | Literatura romana | Logica |
| Matematica | Poezii | Psihologie psihiatrie | Sociologie |
|
|
Nimic mai frumos decat Bucurestiul ! Chiar si cu macarale in prim plan si cu o Dambovita care nu prea aduce cu Sena sau Tamisa.
 Totusi, va
sugereaza ceva aceasta imagine ? Nu ma refer la ideea de
justitie pentru ca am surprins in imagine cladirea Tribunalului.
Ma refer la notiunea de perspectiva. Da ! Perspectiva care face
apel la trei dimensiuni spatiale : latime, inaltime
si profunzime - reprezentate aici prin trei sageti.
Totusi, va
sugereaza ceva aceasta imagine ? Nu ma refer la ideea de
justitie pentru ca am surprins in imagine cladirea Tribunalului.
Ma refer la notiunea de perspectiva. Da ! Perspectiva care face
apel la trei dimensiuni spatiale : latime, inaltime
si profunzime - reprezentate aici prin trei sageti.
|
David, sculptura a lui Michelangelo |
Cele trei dimensiuni spatiale se regasesc si in fiinta noastra - superba fiinta umana pe care ne-o infatiseaza creatorii de arta. Pentru noi toti exista diferenta intre sus-jos, fata-spate, stanga-dreapta. Pe scurt, simturile noastre ne spun ca existam in spatiu si spatiul are trei dimensiuni.
Au existat si exista indelungi dezbateri filosofice si chiar stiintifice asupra existentei sau neexistentei spatiului si, daca acesta exista, asupra proprietatilor sale. Ceea ce ne intereseaza in lucrarea de fata nu sunt aceste discutii si ipoteze, ci doar o simpla abordare pragmatica a realitatii inconjuratoare, care sa ne permita sa extragem concluzii si legi folositoare in activitatea noastra de fiecare zi. Prin urmare, ne vom margini sa afirmam urmatoarele :
|
|
Spatiul este infinit in toate directiile. Spatiul este omogen si izotrop, adica proprietatile sale sunt aceleasi in orice punct si in orice directie. Spatiul are trei dimensiuni.
O alta perceptie a simturilor noastre este aceea a trecerii timpului. Cu alte cuvinte, traim in timp. Se pot spune multe si despre timp. Pot exista controverse. Chiar si in fizica teoria relativitatii face afirmatii despre timp, care multora li se pot parea curioase. Restrangandu-ne la abordarea pragmatica despre care discutam, vom afirma urmatoarele :
Timpul se scurge liniar de la trecut spre viitor, uniform in spatiu si independent de prezenta corpurilor care se afla in spatiu.
|
Spatiul din jurul nostru este populat cu corpuri materiale, mobile sau imobile. Cu alte cuvinte, unele dintre aceste corpuri isi modifica pozitia in raport cu celelalte.
Ceea ce-si propune cinematica ca stiinta este sa studieze miscarile si sa gaseasca legile dupa care se desfasoara acestea.
Legile miscarii pot fi enuntate calitativ, in cuvinte, sau cantitativ, sub forma de expresii matematice.
 Forma matematica a legilor de miscare poate fi
stabilita numai definind marimi fizice
masurabile, masurandu-le experimental si gasind astfel
corelatiile cautate.
Forma matematica a legilor de miscare poate fi
stabilita numai definind marimi fizice
masurabile, masurandu-le experimental si gasind astfel
corelatiile cautate.
Referitor la spatiu si timp, se pot defini doua marimi fizice masurabile :
v Distanta
v Durata
Masurarea distantelor si duratelor se face cu ajutorul unor etaloane, care mai sunt denumite unitati de masura.
In Sistemul International de Unitati de Masura, distantele se masoara in metri, iar duratele in secunde. Distanta (lungimea) si durata (timpul) sunt marimi fizice fundamentale ale Sistemului International de Unitati de Masura. Ca si orice alte marimi fizice fundamentale, distanta si durata au unitati de masura stabilite arbitrar.
|
|
Istoria metrului incepe in 1791, cand Academia Franceza l-a definit ca 1/ 40.000.000 din lungimea meridianului terestru care trece prin Paris. In 1889, Biroul International de Masuri si Greutati a definit metrul drept distanta intre doua linii trasate pe o bara confectionata dintr-un aliaj de platina si iridiu. Progresele in domeniul opticii au condus in 1960 la o noua definitie : metrul este de 1.650.763,73 mai mare decat lungimea de unda a radiatiei rosu-portocalii a atomului de kripton 86, in vid. Ultima definitie, in vigoare si la ora actuala, dateaza din 1983 si este urmatoarea : metrul este distanta parcursa de lumina in vid in a 299.792.458-a parte dintr-o secunda.
|
Initial, secunda a fost definita ca a 86400-a parte a duratei zilei solare medii. La mijlocul secolului XX a fost necesara o definire mai precisa a unitatii de masura a timpului. In 1960, Biroul International de Masuri si Greutati a adoptat definitia dupa care secunda este 1/31.556.925,9747 din durata anului tropic 1900. Deoarece aceasta definitie nu era operationala (anul 1900 fiind de mult trecut), in 1964 a fost propusa o noua definitie a secundei, care a fost adoptata in 1967 si este inca in vigoare. Aceasta este : secunda este intervalul de timp in care se efectueaza 9.192.631.770 oscilatii asociate tranzitiei intre doua nivele hiperfine ale starii fundamentale a atomului de cesiu 133.
 Putem remarca faptul
ca desi etaloanele de timp si lungime sunt printre cele mai
vechi, definirea lor precisa se face pe baza studiilor de fizica contemporane,
efectuate in domenii care nu au nici-o legatura cu mecanica clasica.
Putem remarca faptul
ca desi etaloanele de timp si lungime sunt printre cele mai
vechi, definirea lor precisa se face pe baza studiilor de fizica contemporane,
efectuate in domenii care nu au nici-o legatura cu mecanica clasica.
Dupa ce am definit miscarea ca modificarea pozitiei relative a corpurilor in spatiu, pe masura trecerii timpului, am vorbit despre cinematica ca despre stiinta care urmareste sa stabileasca forma cantitativa a legilor de miscare, am precizat ca forma cantitativa a legilor fizicii se poate stabili numai in urma masuratorilor experimentale si ca masuratorile se pot face doar avand la indemana etaloanele adecvate, mai ramane o singura intrebare : dar care sunt corpurile care nu se misca si care sunt corpurile in miscare ? Raspunsul la aceasta intrebare, aparent simpla, este foarte complicat ! Vom incerca gasirea unei explicatii cat de cat satisfacatoare intr-unul din capitolele urmatoare. Pentru inceput sa incercam o definitie operationala a ceea ce inseamna starea de miscare.
|
|
Privind sculptura din imaginea alaturata, putem observa ca indiferent unde ar fi dusa - chiar daca s-ar afla pe puntea unui vapor care traverseaza oceanul, sau intr-o naveta cosmica - distantele intre cele patru colturi ale ei nu se modifica in timp. Putem trage concluzia ca respectivele patru colturi formeaza un sistem de corpuri de referinta, imobile unele in raport cu celelalte.
|
|
Fata de corpul 1, corpurile 2, 3, 4 au vectorii de pozitie r1,2, r1,3 si r1,4.
 Matematic vorbind,
acesti trei vectori de pozitie alcatuiesc o baza de vectori
in spatiul tridimensional. Prin operatii matematice relativ simple
aceasta baza poate fi transformata intr-o baza de trei
vectori ortonormati ex,
ey,
si ez care indica directiile si sensurile a
trei axe de coordonate carteziene.
Matematic vorbind,
acesti trei vectori de pozitie alcatuiesc o baza de vectori
in spatiul tridimensional. Prin operatii matematice relativ simple
aceasta baza poate fi transformata intr-o baza de trei
vectori ortonormati ex,
ey,
si ez care indica directiile si sensurile a
trei axe de coordonate carteziene.
|
|
|||||||||||||||||||||||
|
|
Construirea sistemului de axe de coordonate ca si afirmatia ca modulul unui versor este unitar nu presupun doar aspecte matematice ci si aspecte fizice. Rezultatul final este bazat pe cunoasterea rapoartelor intre modulele celor trei vectori de pozitie initiali. De asemenea, matematic vorbind, coordonatele x, y si z sunt simple numere, incapabile sa exprime prin ele insele pozitia unui corp. De aceea, sensul fizic al notiunii de sistem de axe de coordonate presupune existenta unui etalon de lungime. Coordonatele x, y, z sunt numerele care arata de cate ori se cuprinde etalonul de lungime in distantele Ox, Oy sau Oz masurate in lungul axelor de coordonate fizice. De altfel, chiar si axele de coordonate din desenul alaturat sunt de natura fizica si nu abstracta (adica sunt trasate pe un suport material, au anumite dimensiuni spatiale s.a.m.d.)
Vectorul de pozitie al unui punct din spatiu se exprima in functie de proiectiile ortogonale ale punctului pe cele trei axe de coordonate (adica, pe scurt, coordonatele punctului) si versorii axelor de coordonate :
r x ex + y ey + z ez
 In practica,
coordonatele nu sunt simple numere, ci marimi fizice masurate cu etalonul
de lungime ales.
In practica,
coordonatele nu sunt simple numere, ci marimi fizice masurate cu etalonul
de lungime ales.
|
|
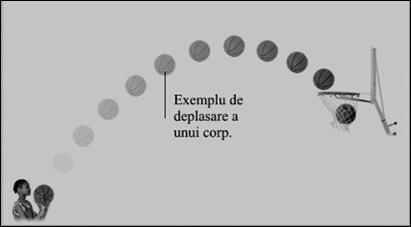
Cu trecerea timpului, pozitia ocupata de un corp se poate modifica in raport cu corpurile de referinta si, implicit, in raport cu sistemul de coordonate. Imaginea alaturata va prezinta pozitiile succesive ale unei mingi de baschet, sugerandu-va trecerea timpului prin intensitatea tonurilor de gri. Evolutia de la un ton de gri la altul este o modalitate grafica de a marca trecerea unor durate egale, sau, cu alte cuvinte, simbolizeaza indicatiile unui ceas.
Acestea fiind spuse, ajungem in sfarsit la ceea ce denumeam la pagina 5 drept o "definitie operationala a ceea ce inseamna starea de miscare". Potrivit acesteia, miscarea reprezinta modificarea in timp a pozitiei unui corp in cadrul unui sistem de referinta.
Sistemul de referinta este un concept fizic care include urmatoarele elemente :
Un ansamblu de corpuri de referinta considerate fixe
Un sistem de axe de coordonate, atasat corpurilor de referinta
Un etalon de lungime, adica o unitate de masura a distantelor si un instrument cu care se poate face masuratoarea de lungime (rigla)
Un etalon de timp, adica o unitate de masura a duratelor de timp si un instrument cu care se poate face masuratoarea de timp (ceas)
 Masurarea experimentala a starii de
miscare a unui corp inseamna in acest context determinarea
simultana a valorilor coordonatelor mobilului si a momentelor de timp
corespunzatoare.
Masurarea experimentala a starii de
miscare a unui corp inseamna in acest context determinarea
simultana a valorilor coordonatelor mobilului si a momentelor de timp
corespunzatoare.
Nu vom vorbi aici despre relativitatea perceptiilor umane, ci ne vom intreba despre ceva mult mai concret : sunt miscarea sau repausul notiuni absolute sau nu ?
|
|
 Daca as afirma ca baronul von Mnchhausen, calare pe o ghiulea
in zbor, este in repaus, in vreme ce melcul se deplaseaza cu o viteza
de aproximativ 30 km/s, m-ati crede probabil la fel de "sincer" ca si
pe celebrul mincinos-baron, sau la fel de "inteligent" ca pe melc. Cu toate
acestea s-ar putea sa am dreptate, fireste omitand sa
va fi spus ceva de la bun inceput. Ce ar fi trebuit sa va
comunic era ca atunci cand ma refeream la starea de miscare a
baronului, corpul de referinta era ghiuleaua, iar cand pomeneam
melcul, corpul de referinta era Soarele. Cei care m-ar fi contrazis
ar fi facut-o, fireste, cu buna credinta, dar se
lasau ei insisi inselati de o prejudecata,
si anume ca pamantul pe care ne desfasuram
existenta este in repaus absolut.
Prin urmare, rationamentul lor, bazat pe ideea (si ea
preconceputa) ca o ghiulea in zbor se misca fata
de pamant mai repede decat un melc, li s-ar fi parut perfect valabil.
Si, ca sa intregesc sirul de ciudatenii din acest
paragraf, va voi mai spune ca s-ar putea sa am dreptate si
atunci cand, pastrand pamantul ca sistem de referinta,
afirm ca exista un interval de timp, chiar si daca este
aparent mic, in care ghiuleaua se misca mai incet decat melcul (de
exemplu, daca ghiuleaua este lansata vertical in sus, in punctul de
inaltime maxima pe care-l atinge ea este o clipa in
repaus).
Daca as afirma ca baronul von Mnchhausen, calare pe o ghiulea
in zbor, este in repaus, in vreme ce melcul se deplaseaza cu o viteza
de aproximativ 30 km/s, m-ati crede probabil la fel de "sincer" ca si
pe celebrul mincinos-baron, sau la fel de "inteligent" ca pe melc. Cu toate
acestea s-ar putea sa am dreptate, fireste omitand sa
va fi spus ceva de la bun inceput. Ce ar fi trebuit sa va
comunic era ca atunci cand ma refeream la starea de miscare a
baronului, corpul de referinta era ghiuleaua, iar cand pomeneam
melcul, corpul de referinta era Soarele. Cei care m-ar fi contrazis
ar fi facut-o, fireste, cu buna credinta, dar se
lasau ei insisi inselati de o prejudecata,
si anume ca pamantul pe care ne desfasuram
existenta este in repaus absolut.
Prin urmare, rationamentul lor, bazat pe ideea (si ea
preconceputa) ca o ghiulea in zbor se misca fata
de pamant mai repede decat un melc, li s-ar fi parut perfect valabil.
Si, ca sa intregesc sirul de ciudatenii din acest
paragraf, va voi mai spune ca s-ar putea sa am dreptate si
atunci cand, pastrand pamantul ca sistem de referinta,
afirm ca exista un interval de timp, chiar si daca este
aparent mic, in care ghiuleaua se misca mai incet decat melcul (de
exemplu, daca ghiuleaua este lansata vertical in sus, in punctul de
inaltime maxima pe care-l atinge ea este o clipa in
repaus).
Ce concluzii trebuie sa tragem din cele spuse ?
|
|
v Nu se poate vorbi in mod absolut despre starea de miscare sau de repaus a unui corp
v Inainte de a spune daca un corp este in repaus sau in miscare trebuie sa stabilim care este sistemul de referinta fata de care studiem evolutia corpului
v Prin urmare, afirmam ca miscarea sau repausul sunt notiuni relative, intelegand prin aceasta ca observatori apartinand unor sisteme de referinta diferite pot avea perceptii diferite in ceea ce priveste starea de miscare a aceluiasi corp
Sperand ca lucrurile au fost lamurite si nu incurcate din acest punct de vedere, nu putem, totusi, sa nu ne punem si unele intrebari :
v Ce utilitate mai poate avea cunoasterea legilor de miscare intr-un referential dat, daca acestea pot avea o cu totul alta forma in alt referential
v Exista oare vreo legatura intre legile de miscare ale aceluiasi corp in sisteme de referinta diferite
v Cauzele care conduc la o anumita forma a legii de miscare depind si ele de sistemul de referinta ales sau nu
 O parte din raspunsurile la aceste intrebari o veti
gasi in capitolele urmatoare.
O parte din raspunsurile la aceste intrebari o veti
gasi in capitolele urmatoare.
|
|
Sa privim fotografia din figura alaturata. Aceasta infatiseaza o serie de obiecte imobile, dar si o lebada care se poate deplasa pe suprafata apei. Daca am fi repetat fotografierea la anumite intervale de timp, am fi surprins lebada ocupand succesiv pozitiile marcate prin cruciulite, in vreme obiectele imobile nu si-ar fi modificat locul. Fiecare dintre fotografii surprinde o stare prin care trece obiectul.
|
|
Datele cantitative despre aceste stari sunt coordonatele pozitiei obiectului si momentele de timp corespunzatoare. Astfel, prima stare surprinsa in fotografie este caracterizata (vezi figura din dreapta) de coordonatele spatio-temporale :
x = 10 m
y = 2 m
t = 10 h 21 min 14 s
A doua stare este caracterizata de datele :
x = 8,5 m
y = 2,4 m
t = 10 h 21 min 17 s
 Schimbarea de stare este
rezultatul procesului de miscare mecanica.
Schimbarea de stare este
rezultatul procesului de miscare mecanica.
Cele doua stari sunt caracterizate
de vectorii de pozitie ![]() , respectiv
, respectiv ![]() , si de momentele de timp t1, respectiv t2,
iar deplasarea obiectului este caracterizata prin vectorul deplasare :
, si de momentele de timp t1, respectiv t2,
iar deplasarea obiectului este caracterizata prin vectorul deplasare : ![]() si prin durata deplasarii: Dt = t2 - t1.
si prin durata deplasarii: Dt = t2 - t1.
|
|
Sa privim figura alaturata, cazul a. Observam ca vectorii deplasare alcatuiesc o linie franta, care uneste pozitiile ocupate de obiect in fiecare dintre fotografiile succesive. Injumatatind intervalele de timp dupa care se repeta fotografierea, se dubleaza numarul de vectori deplasare ce pot fi reprezentati (cazul b). Sa ne imaginam ca am putea reduce intervalul de timp dintre doua fotografii succesive atat de mult incat sa surprindem obiectul in fiecare din punctele din spatiu prin care trece. In acest caz segmentele liniei frante s-ar micsora atat de mult incat s-ar forma o curba continua (cazul c). Aceasta curba continua se numeste traiectorie. Putem remarca ca, in general, traiectoria nu coincide cu conturul poligonal format de vectorii deplasare. Cu toate acestea, cu cat numarul de stari utilizat pentru determinarea vectorilor deplasare este mai mare, cu atat conturul poligonal se apropie mai mult de forma reala a traiectoriei. Rezulta de aici ca procesul de miscare mecanica poate fi aproximat printr-o succesiune de stari, al caror numar trebuie sa fie suficient de mare pentru ca erorile introduse sa fie convenabil de mici.
 Traiectoria reprezinta locul geometric al
punctelor atinse de un mobil in cursul miscarii sale.
Traiectoria reprezinta locul geometric al
punctelor atinse de un mobil in cursul miscarii sale.
|
|
Am putea defini traiectoria si ca urma lasata de un corp in miscare. Pentru exemplificare priviti figura alaturata. Jeturile iesite din motoarele avioanelor lasa pe cer dare care corespund traiectoriilor fiecarui aparat.
Am vorbit despre avioane. Sa trecem la trenuri ! Cunoasteti cu totii o carte extrem de interesanta - de citit mai ales in cursul lungilor calatorii - numita "Mersul Trenurilor". Iata un pasaj din ea :
|
Relatia 300 |
||||||
|
km |
Gara |
P 3005 |
A 421 |
E 23 |
||
|
Bucuresti Nord | ||||||
|
Ploiesti Vest | ||||||
|
Sinaia | ||||||
|
Predeal | ||||||
|
Brasov | ||||||
|
Sighisoara | ||||||
|
Medias | ||||||
|
| ||||||
Privind datele din tabel, observam ca ele reprezinta o lista de coordonate legate de pozitie si timp. Cum putem sa extragem o concluzie din aceasta multime de cifre ? O cale ar fi sa facem o reprezentare grafica a distantei in functie de timp. Vom transforma mai intai orele in minute, astfel incat sa avem o singura unitate de masura a timpului. Obtinem, in acest mod, tabelul de date alaturat :
|
P 3005 |
A |
E |
|||||||||
|
ore: |
min |
total minute |
km |
ore: |
min |
total minute |
km |
ore: |
min |
total minute |
km |
|
|
 Fiecare pereche de date timp-distanta o
reprezentam printr-un punct intr-un sistem de axe de coordonate.
Rezulta graficul de mai jos :
Fiecare pereche de date timp-distanta o
reprezentam printr-un punct intr-un sistem de axe de coordonate.
Rezulta graficul de mai jos :
Ce facem mai departe ? Am putea uni punctele succesive prin segmente de dreapta (desenate prin linii intrerupte). Ce remarcam ? Curbele obtinute sunt aproape niste linii drepte. Din acest motiv, vom incerca in continuare sa trasam niste drepte (de data aceasta ca linii neintrerupte), care, evident, nu mai pot trece prin toate punctele, dar pot fi astfel desenate incat sa lase de o parte sau de alta cam acelasi numar de puncte. Rezultatul este urmatorul :
|
|
Remarcam ca toate cele trei trenuri au ceva in comun : distanta strabatuta este (aproximativ) o functie liniara de timp ! Notand timpul cu t si distanta cu d, putem scrie :
![]()
unde A si B sunt doua constante. Valorile acestor constante se pot determina din grafic, rezultand :
P 3005 : d = 0,68 t - 579
A 421 d = 1,05 t - 1237
 E 23 : d
= 1,15 t - 1125
E 23 : d
= 1,15 t - 1125
|
|
Aceste expresii ne permit sa aflam unde se afla fiecare tren la un anumit moment de timp.
Astfel, pentru :
t = 1000 (min)
personalul ar trebui sa se gaseasca la distanta :
d 1000 - 579 = 680 - 579 = 101 (km)
fata de Bucuresti (verificati pe grafic !).
O functie matematica care ne permite aflarea pozitiei unui corp la un moment de timp bine stabilit se numeste lege de miscare.
In general, legea de miscare se refera la vectorul de pozitie. Din acest motiv, in cazul cel mai general, putem scrie:

unde x,y si z sunt componentele vectorului de pozitie.
Remarcati ca legea de miscare este o ecuatie vectoriala, echivalenta cu trei ecuatii scalare referitoare la componentele vectorului de pozitie. Acestea din urma se mai numesc ecuatiile parametrice de miscare.
Sa revenim la cele trei trenuri. Ar putea cele trei legi de miscare sa ne spuna care dintre trenuri ajunge mai repede de la Bucuresti la Brasov ? Pentru a raspunde la intrebare, sa luam din nou cazul personalului. Sa scriem legea sa de miscare la doua momente de timp diferite:
d1 = 0,68 t1 - 579 ; d2 = 0,68 t2 - 579
Scazand cele doua relatii, rezulta :
d2 - d1 = 0,68 (t2 - t1)
Luand (t2 - t1) = 60 (min), rezulta : d2 - d1 = 40,8 (km). Am aflat astfel ca in decurs de o ora personalul se deplaseaza pe o distanta de 40,8 km. Procedand in mod analog in celelalte doua cazuri, gasim ca acceleratul parcurge 63 km pe ora, iar expresul 69 km pe ora.
 Aceste trei numere ne
permit sa afirmam ca expresul se deplaseaza cel mai repede,
iar personalul cel mai lent.
Aceste trei numere ne
permit sa afirmam ca expresul se deplaseaza cel mai repede,
iar personalul cel mai lent.
Pentru o analiza cantitativa a miscarilor unor mobile diferite, este suficient sa comparam distantele parcurse de acestea in anumite intervale de timp bine determinate.
Raportul dintre distanta parcursa de un mobil si intervalul de timp necesar pentru aceasta se numeste viteza medie. Formula corespunzatoare acestei definitii este :
Sa revenim la cele trei trenuri. Am aflat deja ce viteza medie are miscarea lor. Oare valorile gasite caracterizeaza orice portiune a traseului ? Putem verifica aceasta calculand viteza medie pe diferite tronsoane de drum. Mai intai calculam lungimea fiecarui tronson si apoi durata necesara parcurgerii lui. Raportand lungimea la durata, aflam viteza medie. Rezultatele pot fi inscrise intr-un tabel, dupa cum urmeaza :
|
Nr. crt. |
Tronson |
P 3005 |
A 421 |
E 23 |
|
Bucuresti-Ploiesti |
48,5 km/ora |
90,8 km/ora |
90,8 km/ora |
|
|
Ploiesti-Sinaia |
38,0 km/ora |
53,9 km/ora |
km/ora |
|
|
Sinaia-Predeal |
km/ora |
km/ora |
km/ora |
|
|
Predeal-Brasov |
km/ora |
km/ora |
km/ora |
|
|
Brasov-Sighisoara |
km/ora |
km/ora |
||
|
Sighisoara-Medias |
km/ora |
km/ora |
||
|
Medias-Blaj |
km/ora |
km/ora |
 Datele din tabel pot fi
reprezentate sub forma unei diagrame, ceea ce usureaza compararea
si interpretarea lor.
Datele din tabel pot fi
reprezentate sub forma unei diagrame, ceea ce usureaza compararea
si interpretarea lor.
|
|
Puteti vedea mai sus o astfel de diagrama.
Remarcam ca viteza medie nu este aceeasi pe orice portiune de drum ! Rezulta de aici ca informatia cuprinsa in valoarea vitezei medii are semnificatie numai daca precizam si segmentul de drum pe care ea a fost calculata.
Viteza medie nu poate caracteriza starea de miscare a unui obiect, adica nu poate oferi o informatie legata de un moment concret de timp !
Si atunci, cum putem face distinctia dintre starea de obiect mobil sau imobil ?
 Simpla precizare a
coordonatelor spatio-temporale este insuficienta, ceea ce
inseamna ca este necesara definirea unei marimi fizice, a
carei valoare masoara cantitativ diferenta dintre obiectul
fix si cel in miscare. Aceasta marime fizica se
numeste viteza momentana,
sau pur si simplu viteza.
Simpla precizare a
coordonatelor spatio-temporale este insuficienta, ceea ce
inseamna ca este necesara definirea unei marimi fizice, a
carei valoare masoara cantitativ diferenta dintre obiectul
fix si cel in miscare. Aceasta marime fizica se
numeste viteza momentana,
sau pur si simplu viteza.
Care este asemanarea dintre viteza medie si viteza momentana ? Este una singura : formula de calcul este aceeasi. Care este atunci deosebirea dintre viteza medie si viteza momentana ? Din nou este una singura : intervalul de timp luat in considerare trebuie sa fie cat mai scurt, astfel incat sirul de stari prin care trece corpul sa fie cat mai mic (idealizat, sa se reduca doar la stari extrem de apropiate de starea careia i se atribuie viteza momentana).
Conform celor spuse, putem defini viteza momentana dupa cum urmeaza :
Viteza momentana este marimea fizica vectoriala calculata ca raportul dintre vectorul deplasare si durata necesara deplasarii, atunci cand durata este foarte mica, adica este prima derivata a vectorului de pozitie in raport cu timpul. Formula corespunzatoare este :
![]()
|
|
In figura se poate observa
semnificatia geometrica a vectorului viteza. Fie starea
marcata printr-un cerculet, avand vectorul de pozitie r, la momentul de timp t. Pentru a determina viteza,
consideram doua momente de timp t1
< t , t2 > t , foarte apropiate de momentul t. Trasam vectorii de pozitie
la aceste doua momente de timp si facem diferenta ![]() . Inmultim vectorul Dr cu
scalarul 1/( t2 - t1), gasind astfel
vectorul v.
. Inmultim vectorul Dr cu
scalarul 1/( t2 - t1), gasind astfel
vectorul v.
Vectorul viteza este tangent la traiectorie.
Ca orice alt vector, vectorul viteza are trei componente :

Viteza atribuita unui corp in miscare se poate si ea modifica in timp. Cum masuram cat de repede variaza aceasta ? Este nevoie de o noua marime fizica, denumita acceleratie momentana, sau pur si simplu acceleratie.
Prin definitie : acceleratia momentana este marimea fizica vectoriala calculata ca prima derivata a vectorului viteza in raport cu timpul, sau a doua derivata a vectorului de pozitie in raport cu timpul. Formula corespunzatoare este :
Vectorul acceleratie are, in general, trei componente:

|
|
Similar cu vectorul viteza, se poate construi geometric vectorul acceleratie (vezi figura alaturata).
In general, vectorul acceleratie este orientat sub un anumit unghi in raport cu vectorul viteza, iar cei doi vectori formeaza un plan.
Alegand in acest plan doua axe de coordonate perpendiculare, una dintre ele fiind indreptata in sensul vitezei, exista doua componente ale acceleratiei : acceleratia tangentiala, orientata paralel cu vectorul viteza, si acceleratia normala, orientata perpendicular pe vectorul viteza. Evident, vectorul acceleratie nu are si o componenta perpendiculara pe acest plan.
Din cele discutate pana acum reiese faptul ca starea momentana a unui corp in miscare este caracterizata de trei marimi fizice vectoriale : vectorul de pozitie r, viteza v si acceleratia a, la care se adauga momentul de timp t. Valorile si orientarile celor trei marimi vectoriale se pot modifica in timp.
Functiile matematice care permit aflarea pozitiei, vitezei sau acceleratiei la un moment de timp dat se numesc legi de miscare sau ecuatii de miscare (legea/ecuatia spatiului, legea/ecuatia vitezei, sau legea/ecuatia acceleratiei).
In principiu, daca cunoastem ecuatia acceleratiei, pozitia si viteza initiala ale unui mobil, putem sa determinam atat ecuatia vitezei, cat si ecuatia spatiului.
|
|
 Cu alte cuvinte, daca
stim locul unde se afla mobilul si ce viteza are la un moment
initial, precum si acceleratia sa la toate momentele de timp,
putem afla viteza si pozitia mobilului la orice moment de timp.
Cu alte cuvinte, daca
stim locul unde se afla mobilul si ce viteza are la un moment
initial, precum si acceleratia sa la toate momentele de timp,
putem afla viteza si pozitia mobilului la orice moment de timp.
|
|
|||||||||||
Constructiile geometrice facute pentru a determina vectorul viteza sau vectorul de pozitie au un echivalent analitic : operatiile de integrare.
Cunoscand expresia analitica a acceleratiei ca functie de timp, expresia vitezei se calculeaza cu integrala :
Cunoscand expresia analitica a vitezei ca functie de timp, expresia vectorului de pozitie se calculeaza cu integrala :
|
|
||||||||||||
|
|
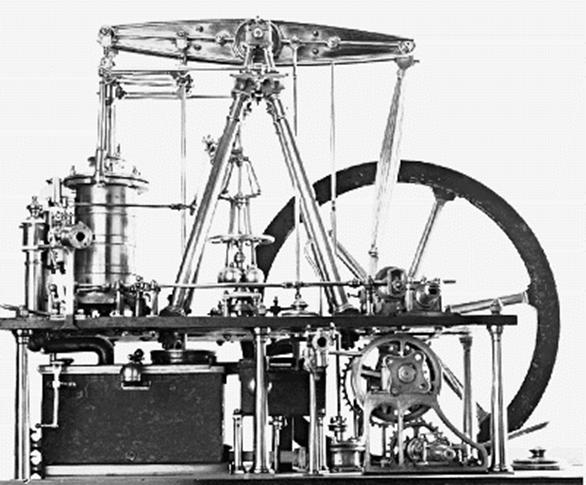
 In figura se poate vedea o masina cu aburi
din secolul al XIX-lea. Desigur, puteti remarca complexitatea ei: piese
care se rotesc, piese in miscare liniara, piese care balanseaza,
roti dintate, lant de transmisie. Cum se poate oare construi ceva atat de complicat ?
In figura se poate vedea o masina cu aburi
din secolul al XIX-lea. Desigur, puteti remarca complexitatea ei: piese
care se rotesc, piese in miscare liniara, piese care balanseaza,
roti dintate, lant de transmisie. Cum se poate oare construi ceva atat de complicat ?
"Taina" consta in cunoasterea legilor dupa care se misca componentele sau partile lor. Cunoscand aceste legi, este relativ simplu sa anticipezi prin calcul cum va functiona ansamblul pieselor, sa le construiesti si sa le asamblezi (simplu pentru inginerul a carui meserie consta tocmai in aceasta !). In fond, aceste cunostinte au stat la baza Revolutiei Industriale din veacul al XIX-lea.
Veti spune : "Bine, si ce legatura are asta cu fizica ?". Legatura este tocmai capitolul de fata.
Un prim demers al cinematicii este realizarea unei clasificari a miscarilor.
Clasificarea miscarilor se poate face in doua moduri :
dupa forma traiectoriei
dupa legea de miscare pe traiectorie
|
|
|
|
Cand vorbim despre tipul de miscare al unui corp trebuie sa furnizam ambele informatii necesare : forma traiectoriei si legea de miscare. Exista, astfel, miscari circulare uniforme, miscari rectilinii uniform variate, miscari curbilinii variate, s.a.m.d.
|
|
 Desi cele mai generale tipuri de traiectorii sunt cele
curbilinii, iar cele mai generale tipuri de legi de miscare corespund
miscarilor variate, totusi, in practica inginereasca
predomina tipurile simple de miscari, cum ar fi cele rectilinii
sau circulare, respectiv uniforme si uniform variate. De multe ori
exista nevoia de a converti un tip de miscare in altul. Figura
alaturata va infatiseaza cum se poate
transforma o miscare de rotatie intr-o miscare rectilinie cu
ajutorul unui troliu.
Desi cele mai generale tipuri de traiectorii sunt cele
curbilinii, iar cele mai generale tipuri de legi de miscare corespund
miscarilor variate, totusi, in practica inginereasca
predomina tipurile simple de miscari, cum ar fi cele rectilinii
sau circulare, respectiv uniforme si uniform variate. De multe ori
exista nevoia de a converti un tip de miscare in altul. Figura
alaturata va infatiseaza cum se poate
transforma o miscare de rotatie intr-o miscare rectilinie cu
ajutorul unui troliu.
Vom discuta in cele ce urmeaza principalele tipuri de miscari mecanice.
Miscarea rectilinie uniforma este miscarea care se face in linie dreapta, viteza avand aceeasi valoare in orice punct al traiectoriei (deci vectorul viteza este constant in timp).
|
|
Dupa cum se vede in figura alaturata, traiectoria poate avea o directie oarecare in raport cu axele sistemului de referinta.
Vectorul viteza este paralel cu directia traiectoriei.
|
|
In figura din dreapta sunt reprezentati vectorii de pozitie ai mobilului la doua momente de timp : t0 si t. Conform definitiei vitezei momentane, putem scrie :
![]()
Ecuatia
spatiului in miscarea rectilinie uniforma
Pentru
ca viteza este constanta prin definitie determinarea legii
de miscare prin integrare este foarte simpla :

 Ecuatia spatiului in miscarea rectilinie
uniforma este o ecuatie vectoriala, echivalenta cu trei
ecuatii scalare, cate una pentru fiecare axa de coordonate :
Ecuatia spatiului in miscarea rectilinie
uniforma este o ecuatie vectoriala, echivalenta cu trei
ecuatii scalare, cate una pentru fiecare axa de coordonate :
In aceste ecuatii :
v x, y, z reprezinta coordonatele punctului in care se afla mobilul la momentul de timp t
v x , y0 , z0 reprezinta coordonatele punctului in care se afla mobilul la momentul de timp t0
v vx , vy , vz sunt componentele vectorului viteza
|
|
Daca nu este impusa o anumita orientare a axelor de coordonate, ele pot fi alese astfel incat vectorul viteza sa fie paralel cu axa Ox. In acest caz traiectoria este paralela cu axa Ox, iar componentele vy si vz sunt nule. De asemenea, alegerea sistemului de coordonate se poate face astfel incat si coordonatele y0 si z0 sa fie nule (vezi figura alaturata). In aceste conditii, din setul de trei ecuatii ne ramane una singura :
![]()
Trebuie remarcat ca in aceasta ecuatie v reprezinta proiectia vectorului viteza pe axa Ox. Aceasta proiectie este un numar pozitiv daca viteza are sensul axei Ox. In caz contrar, proiectia vitezei este un numar negativ.
Fie mai multe momente de timp succesive : t1 , t2 , t3 , .., tn-1 , tn , astfel incat : t2 - t1 = t3 - t2 = ... = tn - tn-1 = t. Conform ecuatiei spatiului, putem scrie :

 Remarcam ca distanta parcursa in oricare
dintre intervalele de timp considerate este aceeasi. Rezulta ca in miscarea rectilinie uniforma
mobilul parcurge distante egale in intervale de timp egale.
Remarcam ca distanta parcursa in oricare
dintre intervalele de timp considerate este aceeasi. Rezulta ca in miscarea rectilinie uniforma
mobilul parcurge distante egale in intervale de timp egale.
Acceleratia momentana este definita astfel :
![]()
Cum vectorul viteza este constant, rezulta :
![]()
 In miscarea
rectilinie uniforma acceleratia mobilului este nula.
In miscarea
rectilinie uniforma acceleratia mobilului este nula.
|
|
Miscarea rectilinie uniform variata este miscarea care se desfasoara in linie dreapta si in care modulul vitezei variaza cu cantitati egale in intervale de timp egale.
|
|
Sa ne amintim ca vectorul viteza este permanent tangent la traiectorie. Rezulta ca atunci cand traiectoria este rectilinie, vectorul viteza nu variaza ca orientare.
Din definitia acceleratiei momentane :
![]()
putem afla viteza la momentul t :
Ecuatia
vitezei in miscarea uniform variata
sau :
![]()
In figura de mai sus se poate vedea rezultatul acestei operatii cu vectori. Se observa ca daca directia acceleratiei nu coincide cu directia vitezei, vectorul viteza variaza ca orientare. Rezulta de aici ca :
 In miscarea
rectilinie uniform variata vectorul acceleratie este permanent
paralel cu vectorul viteza si, implicit, cu directia miscarii.
In miscarea
rectilinie uniform variata vectorul acceleratie este permanent
paralel cu vectorul viteza si, implicit, cu directia miscarii.
|
|
Alegand sistemul de referinta astfel incat traiectoria sa se suprapuna peste axa Ox, obtinem situatia din figura alaturata. Se observa ca vectorul acceleratie poate avea acelasi sens ca si vectorul viteza, dar si sens opus. Ecuatia vectoriala scrisa anterior se reduce in cazul acesta la o singura ecuatie scalara, referitoare la componentele vectorilor pe axa Ox:
![]()
|
|
(nu uitati ca valorile numerice ale marimilor din ecuatie sunt pozitive daca sensul vectorului corespunzator coincide cu sensul axei, respectiv negative in caz contrar !).
In figura alaturata se poate vedea graficul vitezei in functie de timp. Ca si in cazul miscarii rectilinii uniforme, aria cuprinsa intre axa timpului si graficul vitezei, limitata de momentele t si t0, este numeric egala cu distanta parcursa de mobil : x - x0. Se stie ca aria cuprinsa intre graficul unei functii si abscisa este o reprezentare geometrica a integralei functiei respective :

sau :
Ecuatia
spatiului in miscarea rectilinie uniform variata
 Aceasta
ecuatie permite calcularea coordonatei x
a punctului in care se afla mobilul la momentul de timp t, cunoscand pozitia sa
initiala x0
si viteza sa initiala v0
(la momentul t0),
precum si acceleratia miscarii a.
Aceasta
ecuatie permite calcularea coordonatei x
a punctului in care se afla mobilul la momentul de timp t, cunoscand pozitia sa
initiala x0
si viteza sa initiala v0
(la momentul t0),
precum si acceleratia miscarii a.
|
|
|
|
O alta ecuatie importanta a miscarii uniform variate se poate obtine eliminand termenul (t - t0) intre ecuatia vitezei si ecuatia spatiului :
![]()

sau :
![]()
Aceasta relatie se numeste ecuatia lui Galilei. Ea permite calcularea vitezei v daca se cunosc viteza initiala v0, acceleratia a si distanta parcursa de mobil de la inceputul miscarii: (x - x0).
|
|
Miscarea circulara uniforma este miscarea care se desfasoara pe un cerc si in care modulul vitezei este constant.
 Pentru ca modulul vitezei este constant, mobilul aflat in miscare
circulara uniforma parcurge arce de cerc egale in intervale de timp
egale. Fata de centrul cercului, un arc de cerc este delimitat de
doua vectori de pozitie, care formeaza un anumit unghi intre ei.
Din aceea ca arcele de cerc parcurse in intervale de timp egale sunt
egale, rezulta ca si unghiurile
la centru maturate de raza vectoare in intervale de timp egale au valori
egale.
Pentru ca modulul vitezei este constant, mobilul aflat in miscare
circulara uniforma parcurge arce de cerc egale in intervale de timp
egale. Fata de centrul cercului, un arc de cerc este delimitat de
doua vectori de pozitie, care formeaza un anumit unghi intre ei.
Din aceea ca arcele de cerc parcurse in intervale de timp egale sunt
egale, rezulta ca si unghiurile
la centru maturate de raza vectoare in intervale de timp egale au valori
egale.
|
|
Sa consideram un mic interval de timp Dt. In figura alaturata se poate vedea ca in acest interval de timp mobilul parcurge pe traiectorie o distanta Ds, iar raza vectoare matura un unghi la centru Dq. Conform definitiei vitezei :
![]()
Stim ca lungimea arcului de cerc este proportionala cu unghiul la centru exprimat in radiani :
ds = r dq
unde r este raza cercului. Inlocuind in formula de definitie a vitezei, obtinem :
![]()
Observam ca raportul v/r este constant in timp. Rezulta ca si raportul dq dt este constant in timp.
Ce semnificatie are acest raport ? Luand dt egal cu unitatea de masura a timpului, dq reprezinta unghiul la centru maturat de raza vectoare in unitatea de timp. Concluzia este ca :
Intr-o miscare circulara uniforma unghiul la centru maturat in unitatea de timp de raza vectoare are o valoare constanta pe toata durata miscarii. Acest raport constant poate fi luat ca o masura a miscarii circulare uniforme, primind denumirea de viteza unghiulara :
![]()
Putem reformula legea de miscare astfel : intr-o miscare circulara uniforma viteza unghiulara este constanta in timp. Relatia dintre viteza cu care se deplaseaza mobilul pe cerc (numita si viteza liniara) si viteza unghiulara este urmatoarea :
 v wr
v wr
Observam ca viteza liniara este proportionala atat cu viteza unghiulara, cat si cu lungimea razei traiectoriei. O caracteristica a acestei relatii este aceea ca ea depinde de modulele a doua marimi vectoriale: raza vectoare si viteza. Oare ce operatie matematica cu vectori ar corespunde acestei relatii intre module ?
Prima supozitie ar fi aceea ca
viteza unghiulara este o marime scalara si ca : ![]() . Consecinta ar fi ca vectorii viteza si
raza vectoare ar trebui sa fie orientati pe directii
paralele, ceea ce este fals pentru
ca viteza si raza vectoare sunt perpendiculare). Rezulta de aici
ca viteza unghiulara trebuie
sa fie o marime vectoriala ! Veti intreba : dar ce
informatie suplimentara, legata de directie si sens, poate purta viteza unghiulara ?
. Consecinta ar fi ca vectorii viteza si
raza vectoare ar trebui sa fie orientati pe directii
paralele, ceea ce este fals pentru
ca viteza si raza vectoare sunt perpendiculare). Rezulta de aici
ca viteza unghiulara trebuie
sa fie o marime vectoriala ! Veti intreba : dar ce
informatie suplimentara, legata de directie si sens, poate purta viteza unghiulara ?
|
|
Daca priviti figura alaturata puteti observa ca exista doua informatii importante :
v in ce plan se desfasoara miscarea circulara uniforma
v care este sensul de rotatie pe traiectorie
Pentru ca vectorul viteza unghiulara sa cuprinda aceste informatii se utilizeaza urmatoarele conventii :
v directia vectorului este perpendiculara pe planul traiectoriei
v sensul vectorului este acelasi cu sensul in care inainteaza un burghiu drept, asezat perpendicular pe planul traiectoriei, atunci cand este rotit in acelasi sens cu sensul in care se desfasoara miscarea circulara
Deci relatia intre vectorii viteza unghiulara, viteza liniara si raza vectoare poate fi scrisa ca un produs vectorial :
![]()
|
|
Orientarea vectorilor este cea din figura alaturata. Observam ca ei formeaza un triedru drept, fiind perpendiculari doi cate doi.
Viteza unghiulara este constanta in timp. De aceea putem scrie :

Legea
spatiului in miscarea circulara uniforma
sau :
![]()
|
|
Aceasta ecuatie permite calcularea unghiului la centru pe care il face raza vectoare cu diametrul de referinta (vezi figura alaturata), la momentul de timp t, cunoscand viteza unghiulara si unghiul la centru la momentul de timp initial t0.
In miscarea uniforma modulul vitezei liniare este constant, dar vectorul viteza isi schimba in permanenta orientarea. Rezulta de aici ca vectorul viteza variaza in timp. Cu alte cuvinte, miscarea uniform variata este o miscare accelerata.
|
|
Am reprezentat in figura alaturata pozitia unui mobil care se roteste pe un cerc de raza r, la un moment de timp oarecare t. Vectorul de pozitie r se poate exprima in functie de proiectiile sale pe axele de coordonate si de versorii acestora :
![]()
La randul lor, cele doua proiectii pot fi exprimate cu ajutorul unghiului la centru q si al modulului razei vectoare r :
![]()
Rezulta :
![]()
Viteza este prima derivata a vectorului de pozitie in raport cu timpul, rezultand :

sau :
![]()
Acceleratia este prima derivata a vectorului viteza in raport cu timpul, rezultand :

sau :
![]()
Acceleratia este proportionala cu patratul vitezei unghiulare si cu modulul razei vectoare. Vectorul acceleratie momentana are directia razei vectoare momentane, iar sensul ei este opus sensului vectorului de pozitie.
Rezulta ca vectorul acceleratie este indreptat catre centrul traiectoriei si este de asemenea perpendicular pe vectorul viteza. Din aceste motive, acceleratia miscarii circulare uniforme se numeste acceleratie centripeta sau acceleratie normala.
O caracteristica importanta a miscarii circulare uniforme este faptul ca traiectoria este o curba inchisa. De aici decurge repetarea in timp a pozitiilor prin care trece mobilul. Spunem din acest motiv ca miscarea circulara uniforma este o miscare periodica.
Perioada reprezinta intervalul de timp dupa care miscarea se repeta identic. Intr-o perioada mobilul parcurge intreaga circumferinta a traiectoriei. Cum viteza unghiulara este constanta, putem scrie :

 Perioada se
masoara in Sistemul International in secunde.
Perioada se
masoara in Sistemul International in secunde.
O alta marime care reflecta caracterul repetabil al miscarii circulare uniforme este frecventa. Prin definitie, frecventa reprezinta numarul de rotatii complete efectuate in unitatea de timp. Evident, frecventa arata de cate ori se cuprinde perioada miscarii in unitatea de timp :
![]()
Unitatea de masura a frecventei in Sistemul International se numeste rotatii pe secunda.
|
|
Miscarea oscilatorie armonica este
miscarea a carei ecuatie este de forma : ![]() sau
sau ![]() . Parametrii care intervin in expresie au urmatoarele semnificatii:
x - elongatia oscilatiei, A - amplitudinea
oscilatiei, w - pulsatia oscilatiei, j - faza initiala a oscilatiei, F wt j - faza oscilatiei, t - momentul de timp.
. Parametrii care intervin in expresie au urmatoarele semnificatii:
x - elongatia oscilatiei, A - amplitudinea
oscilatiei, w - pulsatia oscilatiei, j - faza initiala a oscilatiei, F wt j - faza oscilatiei, t - momentul de timp.
Miscarile oscilatorii armonice sunt periodice.
Perioada de oscilatie este intervalul de timp dupa care oscilatia se repeta identic.
 Conform definitiei
perioadei de oscilatie, elongatia unei oscilatii periodice trebuie
sa ia aceleasi valori dupa trecerea unor intervale de timp egale
cu cate o perioada. Astfel, pentru o oscilatie armonica :
Conform definitiei
perioadei de oscilatie, elongatia unei oscilatii periodice trebuie
sa ia aceleasi valori dupa trecerea unor intervale de timp egale
cu cate o perioada. Astfel, pentru o oscilatie armonica :
![]()
sau :
![]()
De aici obtinem :

|
Variatia
in timp a elongatiei, vitezei sau acceleratiei oscilatorului armonic |
Aceasta egalitate este adevarata pentru orice moment de timp t doar daca :
![]()
sau :
![]()
Evident, intervalul de timp minim corespunde valorii intregi k = 1, astfel incat perioada oscilatorului armonic are expresia :
![]()
Inversul perioadei de oscilatie se numeste frecventa. Rezulta :
Cand elongatia oscilatorului armonic reprezinta distanta la care se afla oscilatorul fata de pozitia de echilibru, prima derivata a elongatiei in raport cu timpul are semnificatia de viteza, iar a doua derivata pe aceea de acceleratie :
Ecuatia
diferentiala a oscilatorului armonic
Examinand aceste relatii, observam
ca :
![]()
|
|
Un desen de epoca ne infatiseaza primul zbor cu un balon cu aer cald, efectuat avand oameni la bord. Mi-am permis sa adaug desenului original si doua sisteme de axe de coordonate, unul legat de pamant si celalalt atasat balonului. Am ales axele de coordonate in asa fel incat directiile lor sa fie paralele, iar viteza balonului (constanta) sa fie orientata in lungul axei Ox. Viteza balonului ? Scuzati-ma, am uitat sa precizez : viteza balonului fata de pamant, adica, mai precis, viteza deplasarii pe axa Ox. Evident, viteza balonului in raport cu el insusi este nula, dar, in schimb, fata de aeronauti, toata piata din imagine se deplaseaza, ramanand in urma.
 Diferenta intre cetatenii din piata
si aeronauti este aceea ca daca primii sunt siguri de
imobilitatea cladirilor, ceilalti ar putea avea dubii !
Diferenta intre cetatenii din piata
si aeronauti este aceea ca daca primii sunt siguri de
imobilitatea cladirilor, ceilalti ar putea avea dubii !
|
|
Cel mai rau lucru care li s-ar fi putut intampla aeronautilor era sa fie prinsi intr-o tornada, asa cum am incercat sa sugerez in imaginea alaturata (pe care, marturisesc n-am trucat-o prea bine). Miscarea lor fata de pamant n-ar mai fi fost o simpla translatie lina, ci o miscare accelerata, in care totul s-ar fi rotit in jur (in afara, bineinteles, de sistemul lor de referinta : balonul).
|
|
Subiectul acestei lectii este stabilirea relatiilor de corespondenta intre pozitiile, vitezele si acceleratiile unui mobil, asa cum sunt masurate ele de doi observatori aflati in sisteme de referinta diferite, unul dintre acestea fiind in translatie si rotatie fata de celalalt.
|
|
 Sa presupunem ca sistemul de coordonate O este in repaus, iar sistemul O' in translatie si
rotatie. Mobilul M se
deplaseaza atat in raport cu O,
cat si cu O'. La acelasi
moment de timp, mobilul M are o
pozitie fata de O (pe
care conventional o numim pozitie
absoluta) si o pozitie fata de O' (pe care tot
conventional o numim pozitie relativa).
Vectorii de pozitie corespunzatori r, respectiv r'. Tot la
acel moment de timp, vectorul de pozitie al punctului O' fata de punctul O
este rOO'. Cei trei vectori sunt reprezentati in figura
alaturata, iar relatia intre ei este urmatoarea :
Sa presupunem ca sistemul de coordonate O este in repaus, iar sistemul O' in translatie si
rotatie. Mobilul M se
deplaseaza atat in raport cu O,
cat si cu O'. La acelasi
moment de timp, mobilul M are o
pozitie fata de O (pe
care conventional o numim pozitie
absoluta) si o pozitie fata de O' (pe care tot
conventional o numim pozitie relativa).
Vectorii de pozitie corespunzatori r, respectiv r'. Tot la
acel moment de timp, vectorul de pozitie al punctului O' fata de punctul O
este rOO'. Cei trei vectori sunt reprezentati in figura
alaturata, iar relatia intre ei este urmatoarea :
![]()
Despre variatia in timp a bazei de versori a unui sistem de coordonate care executa o miscare de rotatie in jurul originii
|
|
La momentul t baza de versori este :
![]()
La momentul imediat urmator t + dt baza de versori devine :
![]()
Noii versori pot fi exprimati prin combinatii liniare ale vechilor versori, toti coeficientii daij fiind cantitati foarte mici in comparatie cu unitatea :
Mai putem scrie :
 Cand dt 0,
rapoartele din membrul stang au semnificatia de derivate ale versorilor in
raport cu timpul. Rapoartele de tipul daij dt pot fi notate cu wij si au la
momentul t o valoarea
determinata de calitatile miscarii de rotatie.
Prin urmare putem scrie :
Cand dt 0,
rapoartele din membrul stang au semnificatia de derivate ale versorilor in
raport cu timpul. Rapoartele de tipul daij dt pot fi notate cu wij si au la
momentul t o valoarea
determinata de calitatile miscarii de rotatie.
Prin urmare putem scrie :
Sub forma matriciala, relatia de mai sus poate fi pusa sub forma :
Versorii bazei satisfac relatiile :

Cu aceste relatii, derivatele versorilor se scriu astfel :
Notand : wxy wz wyz wx wzx wy relatiile anterioare devin :
Aceasta relatie poate fi pusa si sub forma matriciala :
|
|
Sa presupunem ca mobilul M din schita alaturata se deplaseaza in raport cu punctul O, care este originea unui sistem de axe de coordonate imobil.
Viteza mobilului in raport cu sistemul de coordonate imobil se numeste viteza absoluta.
Viteza absoluta este prima derivata a vectorului de pozitie r in raport cu timpul :
![]()
Am vazut putin mai inainte ca vectorul de pozitie r se poate exprima in functie de alti doi vectori de pozitie r' si rOO'. Notand coordonatele punctului O' in raport cu punctul O prin X, Y si Z avem :
![]()
Prin urmare, tinand cont ca versorii ei nu variaza in timp, dar versorii e'j variaza daca sistemul lor de coordonate se roteste, putem scrie :
![]()
Ultimii trei termeni pot fi prelucrati inlocuind vitezele de variatie ale versorilor prin expresiile lor corespunzatoare :
![]()
Reordonand in functie de versorii bazei, obtinem :
![]()
 Revenind la expresia
vitezei absolute, putem scrie :
Revenind la expresia
vitezei absolute, putem scrie :
Viteza de transport ![]() este viteza cu care un
punct fixat din sistemul mobil se deplaseaza in raport cu sistemul fix.
Viteza de transport are doua componente vectoriale, dintre care una
depinde de miscarea de translatie a sistemului mobil fata
de cel fix
este viteza cu care un
punct fixat din sistemul mobil se deplaseaza in raport cu sistemul fix.
Viteza de transport are doua componente vectoriale, dintre care una
depinde de miscarea de translatie a sistemului mobil fata
de cel fix ![]() , iar a doua de miscarea de rotatie a sistemului
mobil fata de cel fix
, iar a doua de miscarea de rotatie a sistemului
mobil fata de cel fix ![]() , unde w este viteza unghiulara de rotatie a sistemului mobil, iar r' este vectorul de pozitie
momentan al mobilului in sistemul mobil.
, unde w este viteza unghiulara de rotatie a sistemului mobil, iar r' este vectorul de pozitie
momentan al mobilului in sistemul mobil.
Viteza relativa, ![]() , este viteza instantanee a mobilului in raport cu sistemul
mobil.
, este viteza instantanee a mobilului in raport cu sistemul
mobil.
In mecanica clasica, relatia de compunere a vitezelor are forma :
![]()
si enuntul : viteza absoluta este egala cu suma vectoriala intre viteza de transport si viteza relativa.
|
|

 Exemplu : fie sistemul mobil format din roata de bicicleta
din figura alaturata. Punctul M
este in repaus fata de roata si, prin urmare, viteza relativa
este nula. Viteza de translatie este viteza bicicletei v, iar viteza de rotatie este v' = wr
(egala de fapt cu v). Notand cu q unghiul facut de raza vectoare a punctului M cu orizontala, expresiile componentelor vitezei absolute sunt : vx = v(1- sin q), respectiv vy =
-v cos q
Exemplu : fie sistemul mobil format din roata de bicicleta
din figura alaturata. Punctul M
este in repaus fata de roata si, prin urmare, viteza relativa
este nula. Viteza de translatie este viteza bicicletei v, iar viteza de rotatie este v' = wr
(egala de fapt cu v). Notand cu q unghiul facut de raza vectoare a punctului M cu orizontala, expresiile componentelor vitezei absolute sunt : vx = v(1- sin q), respectiv vy =
-v cos q
Acceleratia mobilului in raport cu sistemul de coordonate imobil se numeste acceleratie absoluta.
Acceleratia absoluta este prima derivata a vectorului viteza v in raport cu timpul :
![]()
Deoarece :

obtinem prin derivare in raport cu timpul :
Inlocuind derivatele versorilor, se obtine :

Regrupand in functie de versori, rezulta :
Expresia poate fi restransa astfel :
![]()
In expresie, apare prima derivata a vitezei unghiulare in raport cu timpul. Aceasta se numeste acceleratie unghiulara si se noteaza cu e. Factorii ecuatiei pot fi grupati dupa cum urmeaza :

Acceleratia de transport ![]() este acceleratia
cu care un punct fixat din sistemul mobil se deplaseaza in raport cu
sistemul fix. Acceleratia de transport are trei componente vectoriale,
dintre care una depinde de miscarea de translatie a sistemului mobil
fata de cel fix
este acceleratia
cu care un punct fixat din sistemul mobil se deplaseaza in raport cu
sistemul fix. Acceleratia de transport are trei componente vectoriale,
dintre care una depinde de miscarea de translatie a sistemului mobil
fata de cel fix ![]() , a doua de miscarea de rotatie a sistemului mobil
fata de cel fix
, a doua de miscarea de rotatie a sistemului mobil
fata de cel fix ![]() (unde w este
viteza unghiulara de rotatie a sistemului mobil, iar r' este vectorul de pozitie
momentan al mobilului in sistemul mobil), iar a treia (
(unde w este
viteza unghiulara de rotatie a sistemului mobil, iar r' este vectorul de pozitie
momentan al mobilului in sistemul mobil), iar a treia (![]() ) de variatia in timp a vitezei de rotatie a
sistemului mobil.
) de variatia in timp a vitezei de rotatie a
sistemului mobil.
Acceleratia relativa, ![]() , este acceleratia instantanee a mobilului in raport cu sistemul
mobil.
, este acceleratia instantanee a mobilului in raport cu sistemul
mobil.
 Acceleratia Coriolis
Acceleratia Coriolis ![]() depinde atat de viteza
relativa a corpului mobil, cat si de starea de rotatie a
sistemului mobil in raport cu sistemul fix. Termenul de acceleratie
Coriolis nu poate fi inclus in acceleratia de transport deoarece, prin
definitie, acceleratia de transport se refera la corpuri fixe in
raport cu sistemul mobil. De asemenea acceleratia Coriolis nu poate fi o
componenta a acceleratiei relative deoarece ea cuprinde
informatie privind rotatia sistemului mobil fata de cel fix
si nu numai informatie privind deplasarea corpului mobil in raport cu
sistemul mobil (asa cum presupune notiunea de acceleratie
relativa).
depinde atat de viteza
relativa a corpului mobil, cat si de starea de rotatie a
sistemului mobil in raport cu sistemul fix. Termenul de acceleratie
Coriolis nu poate fi inclus in acceleratia de transport deoarece, prin
definitie, acceleratia de transport se refera la corpuri fixe in
raport cu sistemul mobil. De asemenea acceleratia Coriolis nu poate fi o
componenta a acceleratiei relative deoarece ea cuprinde
informatie privind rotatia sistemului mobil fata de cel fix
si nu numai informatie privind deplasarea corpului mobil in raport cu
sistemul mobil (asa cum presupune notiunea de acceleratie
relativa).
In mecanica clasica, relatia de compunere a acceleratiilor are forma :
![]()
si enuntul : acceleratia absoluta este egala cu suma vectoriala intre acceleratia de transport, acceleratia relativa si acceleratia Coriolis.
|
|
 Exemplu : pentru un observator
din sistemul de referinta cu originea in centrul Pamantului
si care are drept corpuri de referinta trei stele fixe (acesta
fiind sistemul de referinta fix), planeta noastra se roteste
de la vest la est, in jurul axei care trece prin cei doi poli, cu viteza unghiulara
w constanta (e = 0). Un
alt observator ar putea face parte dintr-un sistem de referinta cu
originea tot in centrul Pamantului, dar care are drept corpuri de
referinta trei orase, printre care si Galatiul (acesta
fiind sistemul de referinta mobil). Conform acestor doua
alegeri, sistemul mobil este doar in rotatie in raport cu sistemul fix, nu
si in translatie. Obiectul in miscare ar putea fi apa
Dunarii, care poate fi considerata ca se deplaseaza cu
viteza constanta de la est spre vest (evident, afirmatia este
adevarata pentru observatorul din sistemul legat de suprafata
Pamantului). Deci, relativ la observatorul mobil, Galatiul este in
repaus, ceea ce inseamna ca atat viteza relativa cat si
acceleratia relativa ale Galatiului sunt nule, iar apa
Dunarii se deplaseaza cu viteza relativa constanta,
acceleratia sa relativa fiind nula. Pentru observatorul fix,
atat Galatiul cat si apa Dunarii se deplaseaza, fiind
caracterizate de vitezele si acceleratiile lor absolute. In
conditiile enuntate, Galatiul are o acceleratie de
transport atr = w RP
sin j, la fel ca
si apa Dunarii (RP
este raza Pamantului). In schimb, acceleratia Coriolis a
Galatiului este nula, pe cand cea a apei din Dunare este aC = wvD (vD este viteza
de curgere a Dunarii). Ce inseamna
ca acceleratiile absolute sunt diferite ? Nimic altceva decat
aceea ca apa Dunarii tinde sa se apropie de malul nordic si
sa se departeze de cel sudic.
Exemplu : pentru un observator
din sistemul de referinta cu originea in centrul Pamantului
si care are drept corpuri de referinta trei stele fixe (acesta
fiind sistemul de referinta fix), planeta noastra se roteste
de la vest la est, in jurul axei care trece prin cei doi poli, cu viteza unghiulara
w constanta (e = 0). Un
alt observator ar putea face parte dintr-un sistem de referinta cu
originea tot in centrul Pamantului, dar care are drept corpuri de
referinta trei orase, printre care si Galatiul (acesta
fiind sistemul de referinta mobil). Conform acestor doua
alegeri, sistemul mobil este doar in rotatie in raport cu sistemul fix, nu
si in translatie. Obiectul in miscare ar putea fi apa
Dunarii, care poate fi considerata ca se deplaseaza cu
viteza constanta de la est spre vest (evident, afirmatia este
adevarata pentru observatorul din sistemul legat de suprafata
Pamantului). Deci, relativ la observatorul mobil, Galatiul este in
repaus, ceea ce inseamna ca atat viteza relativa cat si
acceleratia relativa ale Galatiului sunt nule, iar apa
Dunarii se deplaseaza cu viteza relativa constanta,
acceleratia sa relativa fiind nula. Pentru observatorul fix,
atat Galatiul cat si apa Dunarii se deplaseaza, fiind
caracterizate de vitezele si acceleratiile lor absolute. In
conditiile enuntate, Galatiul are o acceleratie de
transport atr = w RP
sin j, la fel ca
si apa Dunarii (RP
este raza Pamantului). In schimb, acceleratia Coriolis a
Galatiului este nula, pe cand cea a apei din Dunare este aC = wvD (vD este viteza
de curgere a Dunarii). Ce inseamna
ca acceleratiile absolute sunt diferite ? Nimic altceva decat
aceea ca apa Dunarii tinde sa se apropie de malul nordic si
sa se departeze de cel sudic.
|
|
Fie cele doua sisteme de coordonate din fotografia alaturata. Unul dintre ele este legat de pamant, iar celalalt de avion. Presupunem ca avionul se deplaseaza rectiliniu si uniform in raport cu solul, iar viteza sa v0 este orientata paralel cu axa Ox'. Pe cer zboara o pasare, cu viteza v fata de sol si v' fata de avion. Vectorul de pozitie al pasarii fata de sol este r, iar fata de avion este r'. Vectorul de pozitie al avionului fata de sistemul de referinta legat de sol este r0.
|
|
Partial, raspunsurile la aceste intrebari sunt continute in paginile anterioare.
Cel mai simplu dintre raspunsuri este cel legat de viteza. Viteza pasarii in sistemul de referinta legat de sol reprezinta viteza absoluta, iar viteza pasarii fata de avion este viteza relativa. Deoarece avionul nu se roteste fata de sol, viteza sa de translatie v0 este chiar viteza de transport. Prin urmare, putem scrie relatia :
![]()
In ceea ce priveste vectorii de pozitie, relatia dintre ei este :
![]()
Pentru ca sistemul de referinta mobil (avionul) este in translatie uniforma in raport cu sistemul de referinta fix (solul), iar viteza sa este v0, vectorul de pozitie r0 poate fi exprimat utilizand legea miscarii rectilinii uniforme (r0(i) este vectorul de pozitie al originii sistemului mobil la momentul de timp t0) :
![]()
In consecinta, relatia intre vectorii de pozitie devine :
Relatia
galileana intre vectorii de pozitie
![]()
Cel mai simplu caz de miscare relativa de translatie uniforma a doua sisteme de referinta este acela in care momentul initial de timp este t0 = 0, originile celor doua sisteme de referinta se suprapun la momentul initial de timp (adica r0(i) = 0), iar axele de coordonate ale unui sistem de referinta sunt paralele cu acelea ale celuilalt referential (care are drept consecinta si relatia v0 = v ex). In aceasta situatie, relatiile intre vectorii de pozitie sau intre viteze devin :
 Trebuie mentionat
inca o data ca aceste relatii sunt valabile doar in ipoteza
implicita ca timpul se scurge la fel in ambele sisteme de referinta
Trebuie mentionat
inca o data ca aceste relatii sunt valabile doar in ipoteza
implicita ca timpul se scurge la fel in ambele sisteme de referinta
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 4169
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved