| CATEGORII DOCUMENTE |
| Astronomie | Biofizica | Biologie | Botanica | Carti | Chimie | Copii |
| Educatie civica | Fabule ghicitori | Fizica | Gramatica | Joc | Literatura romana | Logica |
| Matematica | Poezii | Psihologie psihiatrie | Sociologie |
1 Consideratii generale.
Pentru putea realiza studiile de stabilitate de tensiune, se considera un sistem electroenergetic complex (fig. 1), care va fi modelat matematic. Acest sistem este constituit dintr-un numar de n noduri, dintre care:
nPU sunt noduri cu tensiunea controlata de catre regulatoarele automate de tensiune (RAT) ale generatoarelor si compensatoarelor sincrone, ale transformatoarelor cu reglaj sub sarcina si ale compensatoarelor statice;
nPQ - noduri care alimenteaza prin transformatoare, prevazute eventual cu reglaj sub sarcina, zonele de consum (sarcinile sistemului electroenergetic);
si dintr-un numar de l laturi, dintre care:
lCA sunt linii electrice de transport sau interconexiune;
lTR - transformatoare si autotransformatoare.
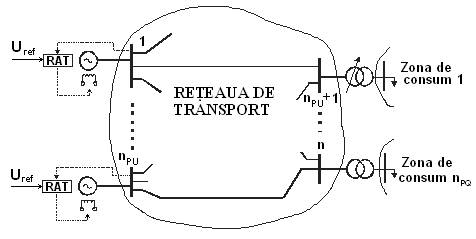
Fig. 1. Structura unui sistem electroenergetic
Prin aplicarea teoriei perturbatiei singulare si a conceptului de domeniu complet, se demonstreaza ca procesele tranzitorii din statorul masinilor sincrone si reteaua de transport sunt extrem de rapide comparativ cu celelalte procese dinamice din sistem si, prin urmare, ele pot fi neglijate in studiile privind stabilitatea SEE.
In acest context, comportamentul dinamic al sistemului electroenergetic poate fi modelat printr-un sistem de ecuatii diferentiale care descriu raspunsul variabilelor dinamice de stare, completat cu sistemul de ecuatii algebrice rezultat prin neglijarea fenomenelor tranzitorii ultra rapide care descriu raspunsul variabilelor algebrice de stare.
Acest model hibrid, format atat din ecuatii algebrice, cat si din ecuatii diferentiale, denumit modelul EAD (Ecuatii Algebro-Diferentiale), constituie modelul matematic de baza pentru studiile privind controlul tensiunilor si al frecventei in sistemele electroenergetice si poate fi scris sub urmatoarea forma compacta:
 (1)
(1)
in care:
[x] este vectorul variabilelor dinamice de stare;
[y] - vectorul variabilelor algebrice de stare;
- vectorul parametrilor.
Pentru stabilirea ecuatiilor care alcatuiesc modelul EAD este necesara cunoasterea modelelor elementelor componente ale sistemului electroenergetic atat in regim permanent de functionare, cat si in regim dinamic.
Avand in vedere cele prezentate, rezulta ca elementele componente ale unui sistem electroenergetic pot fi clasificate astfel:
elemente statice care grupeaza elementele SE al caror comportament static si dinamic se modeleaza numai prin ecuatii algebrice. In aceasta categorie sunt incluse liniile electrice de transport sau de interconexiune, transformatoarele, autotransformatoarele, bobinele de compensare si bateriile de condensatoare;
elemente dinamice care grupeaza elementele SE al caror comportament static si dinamic se modeleaza atat prin ecuatii algebrice, cat si prin ecuatii diferentiale. In aceasta categorie sunt incluse generatoarele si compensatoarele sincrone ;
consumatorii sau sarcinile sistemului electroenergetic care pot fi statice, dinamice sau mixte (statice si dinamice). In functie de natura lor, acestea sunt modelate fie numai prin ecuatii algebrice, fie prin ecuatii algebro-diferentiale.
Modelarea elementelor statice
Considerand ca reteaua este simetrica si echilibrat incarcata, elementele trifazate statice se reprezinta printr-o singura faza a retelei de secventa directa sau secventa '+' .
1. Modelarea liniilor electrice de tensiune alternativa
Liniile electrice de tensiune alternativa, sunt caracterizate de:
impedanta
lineica longitudinala ![]() , in [W/km faza];
, in [W/km faza];
admitanta
lineica transversala  , in [S/km faza],
, in [S/km faza],
unde: r este rezistenta lineica, in [W/km faza];
x - reactanta inductiva lineica, in [W/km faza];
g - conductanta transversala lineica, in [S/km faza];
b susceptanta capacitiva lineica, in [S/km faza],
se reprezinta printr-o schema echivalenta in p cu parametri concentrati (fig.2).
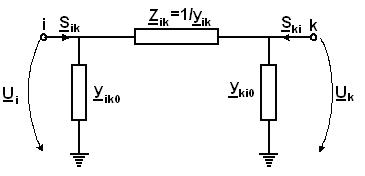
Fig. Schema echivalenta a unei linii electrice de tensiune alternativa.
Valorile parametrilor schemei echivalente se calculeaza cu relatiile:
 (2)
(2)
in care: lik este lungimea liniei, in km;
![]() - impedanta
longitudinala totala a liniei, in W
- impedanta
longitudinala totala a liniei, in W
![]() - admitanta
transversala totala a liniei, in S;
- admitanta
transversala totala a liniei, in S;
K1, K2 - coeficienti de corectie.
Pentru liniile electrice a caror lungime nu depaseste 250km, valorile coeficientilor de corectie K1 si K2 sunt aproximativ 1. In plus, conductanta transversala g0 are o valoare foarte redusa si poate fi neglijata. Din acest motiv, in practica sistemelor electroenergetice pentru calculul parametrilor schemei echivalente in p se folosesc urmatoarele relatii aproximative:
 (3)
(3)
Din punct de vedere al functionarii in cadrul SE, starea unei linii electrice este complet caracterizata de urmatoarele marimi:
tensiunile fazoriale Ui si Uk la cele doua capete;
circulatia de putere pe linie Sik , respectiv Ski.
Avand in vedere schema echivalenta, prin aplicarea teoremelor lui Kirchhoff se obtin urmatoarele relatii de legatura intre puterile Sik, Ski si tensiunile nodale Ui si Uk:
 (4a)
(4a)
din care se determina pierderile de putere pe linie:
![]() (4b)
(4b)
Observatii
(i) in deducerea relatiilor (4) s-au considerat
tensiunile faza-faza, iar valorile curentilor multiplicate cu
factorul ![]() . Aceasta remarca este valabila in toata
lucrarea si, prin urmare, puterea complexa trifazata se va
calcula cu relatia
. Aceasta remarca este valabila in toata
lucrarea si, prin urmare, puterea complexa trifazata se va
calcula cu relatia![]() ;
;
(ii) din punct de vedere al sistemului electroenergetic puterile Sik si Ski sunt puteri care pleaca din nodurile intre care este conectata linia. De aceasta observatie se va tine seama la stabilirea ecuatiilor care exprima bilantul puterilor nodale.
Modelarea transformatoarelor si autotransformatoarelor
Transformatoarele si autotransformatoarele cu doua infasurari se modeleaza printr-o schema echivalenta constituita dintr-un cuadripol in G in serie cu un transformator ideal reprezentat prin operatorul complex de transformare Nki (fig. 3.).
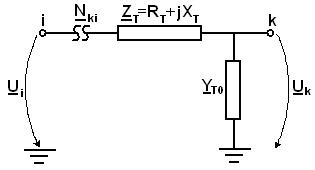
Fig. 3. Schema echivalenta a transformatorului cu doua infasurari si raport complex de transformare
Parametrii schemei echivalente se determina astfel:
▪ impedanta longitudinala ZT = RT + jXT se calculeaza, pe baza datelor de catalog corespunzatoare incercarii de scurtcircuit a transformatorului, folosind relatiile:
 (5)
(5)
in care: RT este rezistenta infasurarilor, in W
XT - reactanta inductiva a infasurarilor, in W
![]() - pierderile de putere
activa in infasurarile transformatorului, in kW
- pierderile de putere
activa in infasurarile transformatorului, in kW
usc - valoarea procentuala a tensiunii de scurtcircuit;
Un,k - tensiunea nominala a infasurarii transformatorului
conectata la nodul k, in kV;
Sn -
puterea nominala aparenta a
transformatorului, in MVA.
▪ admitanta transversala YT0 = GT0 - jBT0 se calculeaza, pe baza datelor de catalog corespunzatoare incercarii de mers in gol a transformatorului, folosind relatiile:
 (6)
(6)
in care: GT0 este conductanta
transformatorului, in S;
BT0 - susceptanta inductiva a
transformatorului, in S;
![]() - pierderile de putere activa la mersul
in gol, in kW;
- pierderile de putere activa la mersul
in gol, in kW;
i0 - valoarea procentuala a curentului de
mers in gol.
▪ raportul de transformare Nki se calculeaza cu relatia:
![]() (7)
(7)
in care : Nki este modulul raportului de transformare calculat, in functie de
posibilitatile de reglaj ale infasurarilor, cu una dintre relatiile:
 (8a)
(8a)
daca infasurarea conectata la nodul k este prevazuta cu posibilitati de reglaj.
Sau:
 (8b)
(8b)
daca infasurarea conectata la nodul i este prevazuta cu posibilitati de reglaj;
Un,i - tensiunea nominala a infasurarii transformatorului
conectata la nodul i, in kV;
np - plotul curent de functionare;
DU - treapta procentuala de reglaj a tensiunii;
Wki - argumentul raportului de transformare, in radiani.
Referitor la schema echivalenta pentru modelarea transformatoarelor cu doua infasurari si a autotransformatoarelor, prezentata in figura , se fac urmatoarele precizari:
in cazul
autotransformatoarelor, mai intai se corecteaza valoarea tensiunii de
scurtcircuit folosind relatia ![]() , in care A si
B sunt constante caracteristice
acestora si apoi valoarea obtinuta este folosita in a doua
expresie din relatiile (5) pentru calculul modulului impedantei ZT ;
, in care A si
B sunt constante caracteristice
acestora si apoi valoarea obtinuta este folosita in a doua
expresie din relatiile (5) pentru calculul modulului impedantei ZT ;
raportul de transformare complex este utilizat numai pentru modelarea transformatoarelor cu reglaj longo-transversal destinate reglarii circulatiilor de puteri. Pentru celelalte transformatoare si autotransformatoare, indiferent de grupa de conexiuni, se foloseste raportul de transformare real. Acest lucru este justificat de faptul ca, pentru a evita aparitia curentilor de circulatie in bucle, suma defazajelor introduse pe o bucla de transformatoarele avand grupe de conexiuni diferite este nula. In aceste conditii, schemei cu operator real de transformare ii corespunde schema echivalenta galvanica in p, prezentata in figura 4, ai carei parametri se determina cu relatiile:
 (9)
(9)
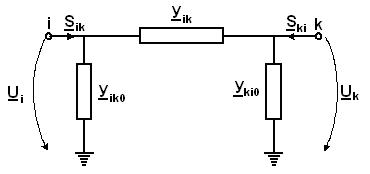
Fig.4. Schema echivalenta galvanica a transformatorului cu doua infasurari si raport real de transformare
Avand in vedere cele prezentate anterior, pentru calculul circulatiei de puteri si a pierderilor de putere se folosesc si in cazul transformatoarelor tot relatiile (4).
3. Modelarea bobinelor de compensare si a bateriilor de condensatoare
Bobinele de compensare si bateriile de condensatoare, conectate in diverse noduri ale unui sistem electroenergetic pentru controlul U-Q, se modeleaza printr-o reactanta, conectata intre nodul respectiv si pamant, a carei valoare se calculeaza cu una dintre relatiile:
pentru bobinele de compensare:
in
care: ![]() este tensiunea
nominala a nodului de racord la retea, in kV;
este tensiunea
nominala a nodului de racord la retea, in kV;
![]() - pierderile de putere
activa in bobina, in MW;
- pierderile de putere
activa in bobina, in MW;
![]() - puterea nominala a bobinei, in MVAr.
- puterea nominala a bobinei, in MVAr.
pentru bateriile de condensatoare:
 (11)
(11)
in care ![]() este puterea nominala a bateriei de condensatoare, in
MVAr.
este puterea nominala a bateriei de condensatoare, in
MVAr.
3. Modelarea elementelor dinamice
3.1 Modelarea masinilor sincrone
Functionarea masinilor sincrone (generatoare, compensatoare si motoare sincrone) este descrisa de ecuatiile generale exprimate in sistemul de coordonate d, q, h, obtinute prin aplicarea transformatei Park asupra variabilelor reale (tensiunile si curentii pe faza, exprimate in coordonate fazice), in urmatoarele ipoteze :
in axa longitudinala - d se tine seama de influenta mutuala a infasurarii de excitatie - f, a infasurarii fictive longitudinale a statorului - d si, eventual, de influenta infasurarilor de amortizare dispuse in lungul acestei axe;
in axa transversala - q se tine seama de influenta mutuala a infasurarii fictive transversale a statorului - q si, eventual, de influenta infasurarilor de amortizare dispuse in lungul acestei axe;
in ecuatiile Park
care descriu functionarea masinii sincrone in regim tranzitoriu, se
neglijeaza tensiunile electromotoare de transformare ![]() si
rezistenta statorului (Rs=0);
si
rezistenta statorului (Rs=0);
se considera
regimul de functionare quasisinusoidal si se inlocuieste
pulsatia ![]() cu pulsatia
sincrona wo
cu pulsatia
sincrona wo
ecuatiile Park, in care intervin fluxuri magnetice, inductante proprii si mutuale, se transforma in ecuatii continand tensiuni electromotoare, reactante si constante de timp.
In aceste conditii, ecuatiile care definesc functionarea masinii sincrone sunt ecuatiile regimului permanent simetric si cele ale regimului tranzitoriu.
● Ecuatiile regimului permanent simetric
Regimul permanent simetric este regimul normal de functionare al masinii sincrone ca generator de energie electrica in sistemele electroenergetice. Ecuatiile de functionare in acest regim, obtinute din ecuatiile generale exprimate in sistemul de coordonate d, q, h prin anularea derivatelor in raport cu timpul ale fluxurilor magnetice, sunt:
 (12)
(12)
respectiv:
![]() (13)
(13)
in care: Ud , Uq sunt componentele pe axele d si q ale tensiunii la bornele masinii;
Id , Iq - componentele pe axele d si q ale curentului statoric;
Xd , Xq - reactantele sincrone in axele d si q ;
Ef - tensiunea electromotoare in axa q corespunzatoare
curentului de excitatie if la mersul in gol (![]() );
);
Eq - tensiunea electromotoare in axa q la mersul in sarcina
care se determina cu relatia ![]() ;
;
![]() - vectorul tensiunii
la bornele masinii (
- vectorul tensiunii
la bornele masinii (![]() );
);
![]() - vectorul curentului
statoric;
- vectorul curentului
statoric;
![]() - vectorul tensiunii
electromotoare induse.
- vectorul tensiunii
electromotoare induse.
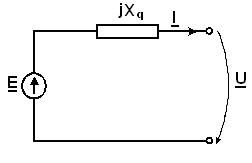
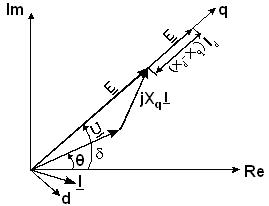
Avand in vedere relatia de legatura dintre componentele (d, q ) aferente sistemului de axe rotorice si componentele (Re, Im ) aferente sistemului fazorial, din ecuatia vectoriala (13) se obtine ecuatia fazoriala:
![]() (14)
(14)
respectiv, schema echivalenta si diagrama fazoriala ale masinii sincrone in regim permanent din figura 5, in care:
![]() este fazorul tensiunii la bornele masinii
sincrone;
este fazorul tensiunii la bornele masinii
sincrone;
 - fazorul curentului statoric;
- fazorul curentului statoric;
![]() - fazorul
tensiunii electromotoare din spatele reactantei sincrone
- fazorul
tensiunii electromotoare din spatele reactantei sincrone
![]() - unghiul
dintre axa q si axa reala Re
(unghiul rotoric).
- unghiul
dintre axa q si axa reala Re
(unghiul rotoric).
a) b)
Fig. 5. Schema echivalenta si diagrama fazoriala ale masinii sincrone in regim permanent
Fiind principalele surse de energie dintr-un sistem electroenergetic, generatoarele si compensatoarele sincrone au un rol esential in mentinerea stabilitatii sistemului si, in special, in prevenirea fenomenelor de instabilitate si colaps de tensiune.
Performantele masinii sincrone, limitate atat de restrictiile tehnologice (puterea maxima a masinii primare, puterea minima tehnica, valoarea maxima a curentului statoric si valoarea maxima a curentului de excitatie), cat si de restrictiile impuse de o exploatare sigura (mentinerea stabilitatii statice), pot fi reprezentate printr-o diagrama de tipul celei prezentate in figura 6. Aceasta a fost trasata pentru o valoare a tensiunii la borne egala cu tensiunea nominala si, prin urmare, punctul N corespunde regimului nominal de functionare.
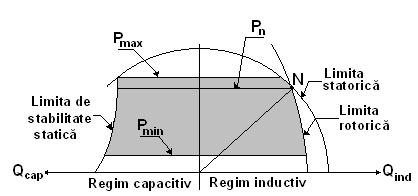
Fig.6. Diagrama de performante P-Q a masinii sincrone.
Avand in vedere rolul pe care il au rezervele de putere reactiva in controlul si mentinerea stabilitatii de tensiune, precum si faptul ca limitarea puterii reactive debitata de unul sau mai multe generatoare din sistem, datorita limitarii curentului statoric sau rotoric, constituie unul din factorii esentiali in declansarea fenomenelor de instabilitate si colaps de tensiune, se impune o modelare cat mai exacta a diagramelor de performante ale masinilor sincrone, in special ale limitelor maxime de putere reactiva pe care acestea le pot furniza in regim de lunga sau scurta durata.
In acest sens, o modalitate o constituie modelarea nodurilor sistemului electroenergetic la care sunt conectate generatoare sau compensatoare sincrone ca noduri cu tensiunea controlata, avand limitele de putere reactiva Qmin si Qmax dependente de valoarea tensiunii la borne.
Aceasta maniera de abordare, diferita de maniera clasica in care valorile Qmin si Qmax sunt fixate, prezinta urmatoarele avantaje:
(i) permite luarea in considerare a rezervei totale de putere reactiva care este cu atat mai mare cu cat incarcarea cu putere activa a generatoarelor este mai redusa;
(ii) permite includerea in cadrul metodelor statice de analiza a stabilitatii de tensiune a efectelor limitarii curentului rotoric sau a curentului statoric.
Pentru determinarea expresiei puterii reactive maxime corspunzatoare
unui anumit regim de functionare al masinii sincrone, caracterizat de
o valoare ![]() a tensiunii la borne, se definesc coeficientii:
a tensiunii la borne, se definesc coeficientii:
![]() si
si  (15)
(15)
cu ajutorul carora
se determina valorile maxime admisibile ale curentului statoric ![]() si rotoric
si rotoric ![]() in functie de valorile nominale ale acestora IS,n
si if,n.
in functie de valorile nominale ale acestora IS,n
si if,n.
In definirea coeficientului KR s-a tinut cont de faptul ca tensiunea electromotoare indusa Ef este direct proportionala cu valoarea curentului de excitatie.
Puterea reactiva maxima corespunzatoare
curentului statoric maxim se determina impunand conditia ![]() din care, la limita, se obtine:
din care, la limita, se obtine:
![]() (16)
(16)
Relatia (16) permite determinarea puterii reactive
maxime QS,max corespunzatoare curentului statoric maxim ![]() atat pentru
generatoarele cu poli aparenti, cat si pentru cele cu poli
inecati.
atat pentru
generatoarele cu poli aparenti, cat si pentru cele cu poli
inecati.
In vederea stabilirii puterii reactive maxime corespunzatoare curentului de excitatie maxim, se determina expresiile puterilor activa si reactiva la borne in functie de tensiunea electromotoare indusa Ef. In acest sens, din relatiile (12) se determina curentii:
![]() si
si ![]() (17)
(17)
si apoi puterea aparenta:
![]() (18)
(18)
respectiv, puterile activa si reactiva:
 (19)
(19)
Din diagrama fazoriala se observa ca:
 (20)
(20)
in care ![]() este unghiul electric
intern al masinii sincrone.
este unghiul electric
intern al masinii sincrone.
Inlocuind relatiile (20) in relatiile (19) rezulta:
 (21)
(21)
Daca se alege originea de faza astfel incat θ=0, se obtin expresiile:
 (22)
(22)
In cazul generatoarelor cu poli inecati Xd=Xq si expresiile puterilor activa si reactiva devin:
 (23)
(23)
Eliminand unghiul δ din relatiile (23), se obtine ecuatia:
 (24)
(24)
din care se determina expresia puterii reactive :
 (25)
(25)
Din relatia (25), considerand ![]() , se determina experesia puterii reactive maxime
corespunzatoare curentului rotoric(de excitatie) maxim admisibil:
, se determina experesia puterii reactive maxime
corespunzatoare curentului rotoric(de excitatie) maxim admisibil:
 (26)
(26)
Fiind stabilite valorile QS,max si QR,max, se determina limita maxima a puterii reactive, folosind relatia:
![]() (27)
(27)
4. Modelarea sarcinii.
4.1. Consideratii generale.
Studiile privind comportamentul dinamic al sistemelor electroenergetice la mici sau mari perturbatii au avut ca principal obiectiv problemele de stabilitate unghiulara si, prin urmare, in modelarea sistemului s-a urmarit cu preponderenta captarea acelor fenomene care pot conduce la pierderea sincronismului. Din acest punct de vedere, metodele de analiza pot fi impartite in urmatoarele doua categorii:
- metode de analiza a modurilor de oscilatie locala, caracterizate prin faptul ca unul sau mai multe generatoare din aceeasi centrala electrica intra in oscilatie in raport cu restul generatoarelor din sistemul electroenergetic. Modelul utilizat in astfel de situatii il constituie clasicul model al generatorului conectat la un sistem de putere infinita;
- metode de analiza a modurilor de oscilatie interzonale, caracterizate de faptul ca un grup de generatoare dintr-o zona intra in oscilatie in raport cu un alt grup de generatoare dintr-o alta zona a sistemului electroenergetic. In acest caz, sarcinile sunt reprezentate prin impedante constante, iar sistemul este redus, prin eliminarea nodurilor pasivizate considerate ca noduri neesentiale, la nodurile interne ale generatoarelor.
In ambele metode de analiza se fac aproximatii drastice privind evolutia tensiunilor si comportamentul unor componente ale sistemului electroenergetic, in special asupra comportamentului sarcinii retelei de transport, care le fac inadecvate pentru studiile de stabilitate si colaps de tensiune.
Astfel, in conditii de instabilitate sau colaps de tensiune toate valorile tensiunilor din sistem se modifica si, prin urmare, nu mai este valabila ipoteza sistemului de putere infinita. Pe de alta parte, stabilitatea de tensiune, cunoscuta in literatura de specialitate si ca 'stabilitatea sarcinii ', este puternic influentata de caracteristicile statice si raspunsul dinamic al sarcinii. In acest context, se mentioneaza faptul ca pentru aceleasi conditii de functionare ale sistemului, adoptarea unui model de tipul 'impedanta constanta ' nu va putea evidentia aparitia fenomenelor de instabilitate sau colaps de tensiune care sunt prezente in cazul utilizarii unui model de sarcina de tipul 'putere constanta '.
In consecinta, in studiile de stabilitate de tensiune este necesara adoptarea unui model adecvat pentru sarcina electrica a retelei de transport.
In teminologia electroenergetica sarcina are mai multe sensuri si semnifica:
(i) un dispozitiv conectat la sistemul electroenergetic care consuma putere activa si/sau reactiva;
(ii) puterea totala activa si/sau reactiva consumata de toate dispozitivele conectate la sistemul electroenergetic;
(iii) o parte a sistemului electroenergetic care nu este reprezentata explicit, dar care este tratata ca un dispozitiv conectat la sistemul electroenergetic.
Pentru studiile privind stabilitatea sistemelor electroenergetice, in general, si pentru studiile de stabilitate de tensiune, in particular, sarcina are sensul prezentat de definitia (iii) si este constituita din reteaua de distributie in care se injecteaza putere din reteaua de transport si repartitie prin intermediul unei statii de transformare. Prin urmare, sarcina unui nod, denumita si consumator complex, include, pe langa consumatori individuali (motoare sincrone si asincrone, sarcini rezistive etc.), si fiderii, distribuitoarele, transformatoarele din posturi etc. (fig.7).
Modelarea cat mai exacta a caracteristicilor statice si dinamice ale consumatorului complex constituie o necesitate atat in activitatea de planificare a dezvoltarii sistemului electroenergetic, cat si in cea de exploatare a acestuia, deoarece utilizarea unor modele care conduc la rezultate pesimiste vor determina investitii suplimentare in echipamente destinate fortificarii sistemului, in timp ce utilizarea unor modele care conduc la rezultate optimiste pot determina exploaterea sistemului in apropierea limitelor functionale facandu-l astfel extrem de vulnerabil.
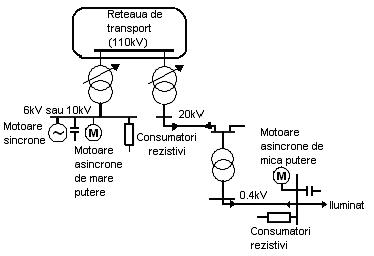
Fig. 7. Structura sarcinii unui nod al retelei de transport.
Fiind cunoscut faptul ca stabilitatea de tensiune depinde in special de caracteristicile statice si comportamentul dinamic al sarcinii, in ultima perioada de timp, pe plan mondial, s-au depus eforturi intensive pentru stabilirea unor modele ale consumatorului complex adecvate pentru studiul fenomenelor de instabilitate si colaps de tensiune.
Astfel, pornind de la considerentul ca este imposibila folosirea unor modele fizice, specifice consumatorilor individuali, pentru modelarea consumatorului complex s-au dezvoltat algoritmi si programe de calcul pentru determinarea caracteristicilor acestuia pornind de la structura elementelor componente si de la masuratorile efectuate in diverse noduri ale sistemului.
Caracteristicile sarcinii reprezinta un set de parametri, ca de exemplu factorul de putere, variatia puterii active si reactive in functie de tensiune si frecventa, ce caracterizeaza comportarea specifica a consumatorului in regimuri statice sau dinamice. Exprimarea matematica a acestor dependente constituie modelul matematic al sarcinii care poate fi scris sub urmatoarea forma generala:
 (28)
(28)
in care: P0 , Q0 sunt puterile activa si reactiva consumate in conditiile in care tensiunea U si frecventa f sunt egale cu valorile U0 si f0 corespunzatoare regimului de functionare normala;
fP , fQ - functii care definesc dependenta puterilor activa si reactiva consumate de tensiunea si frecventa la un moment dat t. In conditiile functionarii in regim nominal valorile acestor functii sunt egale cu 1.
In regim static caracteristicile sarcinii, denumite caracteristici statice, reprezinta dependenta puterilor activa si reactiva la un moment dat de tensiunea nodului de racord si frecventa din sistem in regim quasistatic caracterizat de faptul ca modificarea conditiilor de functionare este extrem de lenta, iar trecerea sistemului electroenergetic de la o stare la alta poate fi considerata ca o succesiune de regimuri permanente (o succesiune de puncte de echilibru). Pentru modelarea acestor caracteristici se utilizeaza numai ecuatii algebrice in care nu intervine timpul.
In regim dinamic, caracteristicile sarcinii, denumite caracteristici dinamice, reprezinta aceiasi dependenta a puterilor activa si reactiva consumate de tensiunea nodului de racord si frecventa din sistem in regim tranzitoriu cand conditiile de functionare ale sistemului se modifica substantial de la un moment de timp la altul. Prin urmare, in acest caz, pentru modelarea caracteristicilor sistemului se folosesc ecuatii algebro-diferentiale in care intervine timpul.
4. Modele statice
In cadrul acestor modele, pentru aproximarea caracteristicilor fP(U,f) si fQ(U,f) ale consumatorului complex se folosesc fie functii polinomiale, fie functii exponentiale.
Modelul polinomial
Acest model utilizeaza functii polinomiale pentru a defini dependenta puterilor activa si reactiva, consumate la un moment dat, de tensiunea nodului de racord si frecventa din sistem.
In general, pentru consumatorul complex expresiile functiilor fP si fQ sunt de forma:
 (29)
(29)
in care: a0, a1, a2, b0, b1 si b2 sunt coeficienti care definesc dependenta puterilor consumate de tensiunea U a nodului de racord, raportata la tensiunea de functionare in conditii normale U0, iar a3 si b3 sunt coeficienti care definesc dependenta puterilor consumate de abaterea frecventei fata de frecventa nominala f0. Valorile acestor coeficienti depind de structura consumatorului si, in principal, de ponderea motoarelor asincrone.
Pentru exemplificare, in tabelul 1. sunt prezentate cateva modele polinomiale, extrase din literatura de specialitate, care exprima dependenta puterilor consumate de tensiunea nodului de racord raportata la tensiunea de functionare in conditii normale U0 si tipul consumatorului.
Expresiile (29) permit determinarea cu usurinta a
tensiunii critice la bornele sarcinii (tensiunea critica din punct de vedere
al sarcinii) definita de conditia ![]() sau (
sau (![]() ). Prin urmare,
). Prin urmare, ![]() si are o valoare cuprinsa intre 0 si 0,7 in
functie de ponderea motoarelor asincrone.
si are o valoare cuprinsa intre 0 si 0,7 in
functie de ponderea motoarelor asincrone.
Tabelul 1. Exemple de modele statice polinomiale
|
Tipul consumatorului |
|
|
|
Aer conditionat |
|
|
|
Motoare asincrone |
|
|
|
Consumator complex |
|
|
Modelul exponential
In cadrul acestui model se folosesc functiile exponentiale pentru a defini dependenta puterilor consumate de tensiunea nodului de racord si functii polinomiale pentru a defini dependenta puterilor consumate de abaterea frecventei. In aceste conditii, expresiile functiilor fP si fQ sunt:
 (30)
(30)
in care kP si kQ sunt exponenti a caror valoare este aproximativ egala cu valorile coeficientilor de autoreglaj ai sarcinii nodale definiti de relatiile:
![]() ,respectiv,
,respectiv,![]() (31) Referitor
la modelele statice prezentate se fac urmatoarele precizari:
(31) Referitor
la modelele statice prezentate se fac urmatoarele precizari:
(i) considerand a3=b3=0 si valori corespunzatoare pentru coeficientii a0, a1, a2, b0, b1 si b2, respectiv pentru exponentii kP si kQ, din modelele generale se obtin modelele unor sarcini care au caracteristici particulare si anume:
sarcini de tip impedanta
constanta caracterizate de faptul ca puterile activa
si reactiva consumate variaza direct proportional cu
patratul tensiunii. Modelul asociat acestui tip de sarcina, numit modelul
Z, este: , respectiv
, respectiv  ;
;
sarcini de tip curent
constant caracterizate de faptul ca puterile activa si
reactiva consumate variaza direct proportional cu tensiunea.
Modelul asociat acestui tip de sarcina, numit modelul I, este: , respectiv
, respectiv  ;
;
sarcini de tip putere
constanta caracterizate de faptul ca puterile consumate nu
variaza cu tensiunea. Modelul asociat acestui tip de sarcina, numit modelul
P, este:![]() , respectiv
, respectiv ![]() ;
;
(ii) daca modelul polinomial sau cel exponential este utilizat pentru modelarea unui consumator individual (motoare sincrone sau asincrone, lampi pentru iluminat etc) atunci valorile P0, Q0 si U0 sunt valorile nominale ale puterilor si tensiunii. In schimb, pentru cazul consumatorului complex, acestea sunt valorile corespunzatoare conditiilor initiale pentru studiul efectuat (de regula sunt valorile rezultate in urma unui calcul de regim permanent);
(iii) utilizarea modelului exponential cu valori ale exponentilor kP si kQ mai mici decat 1 (sau a unui model polinomial echivalent) in cadrul unor simulari dinamice ale comportamentului sistemului electroenergetic poate conduce la rezultate carora nu li se poate da o interpretare fizica si care sunt, deci, discutabile.
4.3. Modele dinamice.
Acestea reproduc prin ecuatii algebro-diferentiale comportamentul dinamic al sarcinii determinat de caracteristicile intrinseci ale acesteia sau de actiunea unor dispozitive de reglaj, ca de exemplu, regulatorul automat al ploturilor transformatoarelor sau sistemele de reglare a sarcinilor termostatate.
In acest context, modelele dinamice pot fi impartite in modele dinamice fizice care folosesc variabilele de stare inertiale sau neinertiale asociate marimilor fizice reale si in asa zisele modele dinamice generice care folosesc variabile de stare care nu sunt asociate unor marimi fizice reale, dar carora li se poate da o interpretare fizica.
4.3.1. Modele dinamice fizice
In categoria modelelor dinamice fizice sunt incluse modelul dinamic al motoarelor asincrone si modelul dinamic al transformatoarelor cu reglaj sub sarcina.
■ Modelul motorului asincron
Se considera un motor asincron alimentat dintr-un nod al sistemului electroenergetic(fig.8a).
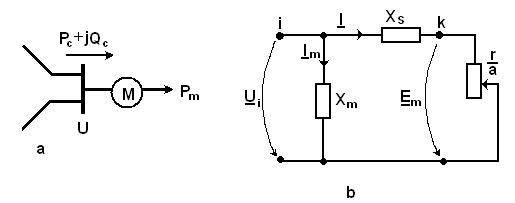
Fig. 8. Sarcina de tip motor asincron: a) alimentarea dintr-un nod al sistemului electroenergetic; b) schema echivalenta a motorului asincron.
Daca se neglijeaza rezistenta infasurarilor statorice(RS=0) si conductanta transversala (G =0), se obtine schema echivalenta aproximativa din figura 8b, in care:
r este rezistenta rotorica raportata la stator;
XS - reactanta echivalenta raportata la stator;
a - alunecarea definita de relatia ![]() ;
;
ω - viteza unghiulara sincrona;
ωm - viteza unghiulara a rotorului;
Em - tensiunea electromotoare;
pe baza acestei scheme se pot stabili caracteristicile statice ale motorului asincron, astfel:
▪ puterea activa absorbita din sistem
PC este egala cu puterea disipata pe rezistenta variabila ![]() si se determina cu relatia:
si se determina cu relatia:
 (32)
(32)
▪ puterea reactiva consumata QC se compune din puterile reactive disipate pe reactanta de magnetizare si reactanta echivalenta XS, adica:
![]() (33)
(33)
In ipoteza neglijarii fenomenelor tranzitorii ultrarapide din stator, comportamentul dinamic al motorului asincron este determinat de dinamica rotorului si de dinamica fluxurilor utile rotorice. Prin urmare, modelul matematic al motorului asincron in regim tranzitoriu cuprinde, ca si modelul matematic al masinii sincrone, ecuatia regimului electromecanic si ecuatiile regimului electromagnetic.
● Ecuatia regimului electromecanic
Este ecuatia diferentiala care descrie dinamica rotorului sub actiunea cuplului motor reprezentat de cuplul electromagnetic Ce si a cuplului rezistent Cm reprezentat de cuplul opus de mecanismul antrenat. Ecuatia specifica motorului asincron este:
![]() (34)
(34)
in care :
wm - este viteza unghiulara relativa a rotorului raportata la viteza sincrona w
Pe* - puterea electromagnetica in unitati relative, egala cu valoarea cuplului electromagnetic Ce* exprimat tot in unitati
Pm* - puterea mecanica in unitati relative, egala cu valoarea cuplului rezistent Cm* exprimat tot in unitati
H - constanta de inertie.
Se precizeaza faptul ca valoarea cuplului rezistent depinde de viteza de rotatie wm. In practica, pentru a exprima aceasta dependenta se foloseste relatia:
![]() (35)
(35)
in care Cm0 este cuplul nominal, iar valorile coeficientilor A, B si C depind de natura mecanismului antrenat.
Ecuatiile regimului electromagnetic
Aceste ecuatii, exprimate in sistemul de coordonate rotorice d-q, cuprind :
ecuatiile algebrice statorice
 (36)
(36)
ecuatiile diferentiale:
 (37)
(37)
in care: Ud, Uq sunt componentele tensiunii la borne;
![]() ,
, ![]() - tensiunile
electromotoare tranzitorii;
- tensiunile
electromotoare tranzitorii;
![]() ,
, ![]() - componentele curentului;
- componentele curentului;
![]() - reactanta tranzitorie echivalenta;
- reactanta tranzitorie echivalenta;
![]() - constanta de timp tranzitorie.
- constanta de timp tranzitorie.
■ Modelul dinamic al unei sarcini statice alimentata printr-un transformator cu reglaj sub sarcina
Se considera o sarcina statica alimentata dintr-un nod al sistemului electroenergetic printr-un transformator cu reglaj sub sarcina ( fig 9a).
Considerand ca sarcina are o caracteristica de tipul Z=ct si neglijand pierderile de mers in gol ale transformatorului, se obtine schema echivalenta din figura 9b in care ZS este impedanta sarcinii, iar ZT impedanta transformatorului.
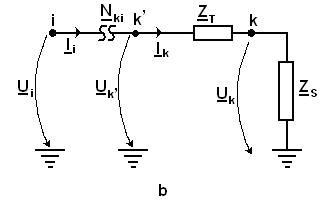
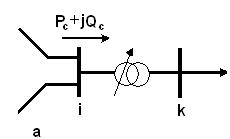
Fig. 9. Sarcina alimentata print-un transformator cu reglaj sub sarcina:
a) alimentarea dintr-un nod al sistemului electroenergetic; b) schema echivalenta.
Daca se noteaza ![]() atunci, conform schemei echivalente, rezulta:
atunci, conform schemei echivalente, rezulta:
 (38)
(38)
Prin urmare, admitanta echivalenta a sarcinii vazuta din nodul de racord la sistemul energetic este:
![]() (39)
(39)
iar puterea absorbita din sistem :
![]() (40)
(40)
si, deci, caracteristicile statice ale consumatorului vazute de catre sistem sunt:
 (41)
(41)
4.3. Modele dinamice generice
Pornind de la faptul ca utilizarea unor metode dinamice fizice, specifice anumitor sarcini este inadecvata pentru modelarea consumatorului complex alimentat dintr-un nod al sistemului electroenergetic, in litaratura de specialitate s-au dezvoltat asa zisele modele dinamice generice.
Acestea constituie o generalizare dinamica a modelelor statice uzuale si au rolul de a descrie comportamentul specific sarcinii complexe la aparitia unor variatii bruste de tensiune in nodul de racord datorate unor perturbatii aparute in reteaua de transport.
In urma masuratorilor efectuate pe barele de inalta tensiune ale unor statii de transformare care alimenteaza reteaua de distributie s-a constatat faptul ca raspunsul consumatorului complex la o variatie a nivelului de tensiune este de forma prezentata in figura 10.
Acest raspuns reflecta efectul colectiv al tuturor componentelor consumatorului complex de la transformatorul cu reglaj sub sarcina din statia de alimentare pana la consumatorii individuali (fig 7).
Se constata ca o modificare brusca a tensiunii pe barele de inalta tensiune ale statiei de transformare determina o modificare instantanee a puterii cerute din sistem. Aceasta variatie defineste caracteristica tranzitorie a sarcinii si poate fi modelata printr-o impedanta ZC constanta, asa cum se procedeaza in cadrul programelor de analiza a stabilitatii tranzitorii sau, mai general, printr-o caracteristica de tip exponential.
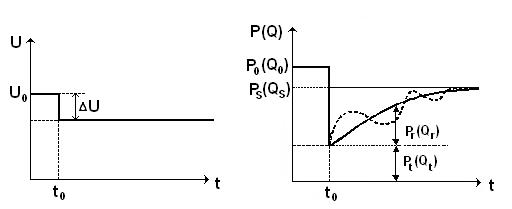
Fig.10. Raspunsul dinamic al unei sarcini complexe la o variatie de tensiune.
Urmeaza apoi un proces dinamic de revenire a sarcinii caracterizat de faptul ca puterea furnizata de sistem creste pana devine egala cu puterea solicitata de consumator, adica egala cu puterea obtinuta din caracteristica statica corespunzatoare noului nivel de tensiune.
Procesul dinamic de revenire a sarcinii poate fi asimptotic sau oscilatoriu, iar durata lui variaza de la cateva secunde pana la cateva minute si depinde de compozitia sarcinii.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2655
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved