| CATEGORII DOCUMENTE |
| Astronomie | Biofizica | Biologie | Botanica | Carti | Chimie | Copii |
| Educatie civica | Fabule ghicitori | Fizica | Gramatica | Joc | Literatura romana | Logica |
| Matematica | Poezii | Psihologie psihiatrie | Sociologie |
CURBE IN SPATIU
1. Definitia si ecuatiile curbei in spatiu
1.1 Curbe date parametric
Fie R3 spatiul euclidian tridimensional. Notam: cu I un interval deschis (alteori inchis, semiinchis sau reuniune de intervale) din R si cu r, functia:
r : I R3
Fiecarei valori tII
ii corespunde un singur punct P= r(t) IR3.
Fata de baza canonica ![]() a lui R3
putem scrie vectorul de pozitie:
a lui R3
putem scrie vectorul de pozitie:
![]()
Definitia 1 O functie deferentiabila r:I R3 se numeste curba si se noteaza cu r. Alteori numai imaginea r(I) este numita curba
![]() (1)
(1)
sau echivalent:
![]()
in acest caz functia r se numeste parametrizare, tII se numeste parametru, iar ecuatiile x=x(t), y=y(t), z=z(t) se numesc ecuatiile parametrice ale curbei G si notam:
G : x=x(t), y=y(t), z=z(t), tII
iar
ecuatia ![]() se numeste ecuatia vectoriala a curbei G
ceea ce vom nota:
se numeste ecuatia vectoriala a curbei G
ceea ce vom nota:
![]() tIi
tIi
Exemplu. Curba data printr-o ecuatie vectoriala parametrica:
![]()
Aceeasi curba G este data cartezian de ecuatiile (carteziene) parametrice:
![]()
Consideram cunoscuta notiunea de arc de curba rectificabil (arc care are o lungime) si reamintim doar expresia lungimii arcului: daca x(t), y(t), z(t) sunt de clasa C1 lungimea arcului de curba determinat de punctele A(t0), B(t1) este:
![]()
Luand un punct fix A(t0) pe curba G si un punct arbitrar P(t) definim numarul s(t) astfel:
s(t)=l(t0,t), daca t t0; s(t)=-l(t0,t) daca t<t0
Rezulta ca s:I J este o functie continua strict crescatoare si defineste o schimbare de parametru pe curba. Acest parametru s, il vom numi abscisa curbilinie a lui P ceea ce vom nota P(s). Ecuatia:
![]()
se numeste ecuatia naturala (parametrul este lungimea arcului AP) (fig. 1). Vom considera arce orientate luand ca sens pozitiv pe curba sensul determinat de t crescator.
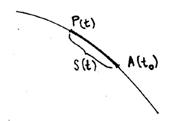
Fig. 1
Definitia 2 Daca G : x=x(t), y=y(t), z=z(t), tII este o curba de clasa C1, numim element de arc pe G diferentiala:
![]()
Din definita 2 si tinand seama ca,
daca ![]() avem
avem ![]() rezulta o alta
expresie a elementului de arc:
rezulta o alta
expresie a elementului de arc:
![]()
sau echivalent:
![]()
1.2 Curbe date implicit
Fie F=F(x, y, z) si G=G(x, y, z) doua functii derivabile. Consideram multimea: G=, adica multimea solutiilor sistemului:
F(x,y,z) = 0, G(x,y,z) = 0, (x,y,z)ID R3 (2)
In general multimea G nu este o curba. Daca insa intr-un punct
M0(x0, y0, z0) IG rangul matricei JACOBI:
este
doi, atunci exista o vecinatate V a punctului M0 in R3
astfel incat ![]() multimea tuturor solutiilor
sistemului (2) situate in V, este curba. Intr-adevar, fie rang J=2. Rezulta ca
in M0 este nenul cel putin unul dintre jacobienii (determinantii
functionali)
multimea tuturor solutiilor
sistemului (2) situate in V, este curba. Intr-adevar, fie rang J=2. Rezulta ca
in M0 este nenul cel putin unul dintre jacobienii (determinantii
functionali)
 (3)
(3)
Fie de exemplu:
![]()
Atunci, dupa teorema functiilor
implicite, exista o vecinatate V a punctului M0 in R3
astfel incat multimea ![]() sa se reprezinte sub forma:
sa se reprezinte sub forma:
![]()
unde
W este vecinatatea in R a punctului x0 iar y=f(x), z=g(x) sunt functii
derivabile definite pe W. In acest caz ecuatiile (2) se numesc ecuatiile implicite ale curbei ![]() , iar:
, iar:
y=f(x), z=g(x), (xIW)
se numesc ecuatiile explicite ale aceleiasi curbe. Ecuatiile:
x=t, y=f(t), z=g(t), (tIW)
sunt
ecuatiile parametrice ale curbei ![]() .
.
Daca rangul matricii JACOBI este egal cu doi in toate punctele lui G, atunci G este o curba. Punctul M0(x0,y0,z0)I G in care rang J=2 sau, echivalent, cel putin unul dintre jacobienii (3) este nenul, se numeste punct regulat al curbei G
Observatie. Reprezentarea parametrica a unei curbe nu
este unica. Dintr-o reprezentare data ![]() se poate obtine alta
printr-o schimbare de variabila
se poate obtine alta
printr-o schimbare de variabila ![]() , unde s
este o functie strict monotona continua cu
, unde s
este o functie strict monotona continua cu ![]() , numita si functie
coordonata.
, numita si functie
coordonata.
Exemplu: Consideram multimea:
![]()
In acest caz:
F=x2+y2+z2-a2,
![]()
![]()
Toate punctele lui G
care verifica rang J=2 definesc o curba in spatiu. Aceasta curba aflandu-se la
intersectia unei sfere cu un plan este un cerc.
Acest cerc G
se afla in planul![]()
Conditia rang J=2 este verificata in toate punctele lui G caci
rang
J<2 ![]() adica nu este
indeplinita conditia rang J=2 in punctele de pe normala in O la plan, ori
acestea nu sunt pe G
adica nu este
indeplinita conditia rang J=2 in punctele de pe normala in O la plan, ori
acestea nu sunt pe G
Denumire. Conditiile impuse functiilor r; x(t), y(t), z(t); F(x,y,z), G(x,y,z) care reprezinta o curba in spatiu se numesc conditii de regularitate.
Fie o curba in spatiu G data prin functia r: I R3.
Definitia 3 Un punct PIGse numeste simplu daca exista o singura valoare tII astfel incat r(t)=P. Daca exista mai multe valori distincte t1, t2, ., astfel incat:
r(t1)=P, r(t2)=P, .
atunci punctul P se numeste punct multiplu. Multiplicitatea lui P este cardinalul multimii r-1(P).
De exemplu, daca exista numerele t1, t2I I, t1 t2 si numai acestea astfel incat r(t1)=r(t2)=P atunci puctul P se numeste dublu (fig.2).Daca exista trei numere reale distincte t1, t2, t3II si numai acestea astfel incat r(t1)=r(t2)=r(t3)=P atunci puctul P se numeste triplu (fig.3).
Definitia 4 O curba formata numai din
puncte simple se numeste curba simpla.
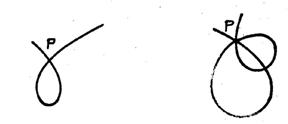
Fig.2 Fig.3
Teorema
1 O curba ![]() data printr-o functie
r : I R3
diferentiabila si injectiva este o curba simpla.
data printr-o functie
r : I R3
diferentiabila si injectiva este o curba simpla.
Demonstratie. Intr-adevar, pentru t1 t2 nu putem avea r(t1)=r(t2) intrucat r este injectiva deci punctele lui G sunt toate simple.
Exemplu. In R3 consideram curbe pentru care cel putin una din coordonatele unui punct arbitrar al ei este functie lineara, de exemplu z=bt, adica avem curba de ecuatii parametrice:
G : x=x(t), y=y(t), z=bt, tII
Observam ca t1 t2 bt1 bt2 z(t1) z(t2) r(t1) r(t2). De asemenea o astfel de curba nu poate fi nici periodica si nici inchisa.
Concretizam luand curba descrisa de un punct pe o suprafata cilindrica de rotatie si avand o miscare compusa dintr-o rotatie in jurul axei cilindrului si o translatie de-a lungul acestei axe, cele doua miscari fiind proportionale intre ele. O astfel de curba se numeste elice circulara (fig.4. Presupunand ca un mobil care ar descrie miscarea respectiva ar pleca din A(a,0,0) obtinem ecuatiile parametrice ale curbei (traiectoriei mobilului):
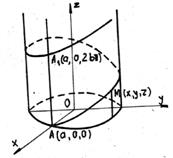
Fig.4
G : x=a cos t, y=a sin t, z=bt, tIR
unde
z reprezinta translatia, t rotatia, iar b=costant. Curba intalneste fiecare
generatoare a suprafetei cilindrice S
: x2+y2=a2 intr-o infinitate de puncte. Arcul
de curba cuprins intre doua puncte consecutive de pe o generatoare, de exemplu,
de pe generatoarea ce trece prin A, intre punctele A(a,0,0) si A1(a,0,2bp)
se numeste spira a elicei iar
lungimea ![]() se numeste pasul elicei.
se numeste pasul elicei.
2. Tangenta si planul normal la o curba in spatiu
2.1 Curbe date parametric
Fie o curba G
![]() si P=r(t)
si P=r(t) ![]()
Derivata functiei vectoriale ![]() (atunci cand exista) este:
(atunci cand exista) este:
![]() (4)
(4)
Evident
![]()
Vectorul
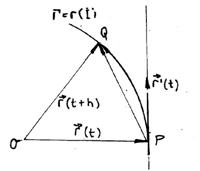
![]() se numeste vector viteza in punctul P si apare ca
pozitia
se numeste vector viteza in punctul P si apare ca
pozitia
limita
a vectorului ![]() cand QIr(I)
se apropie de P.
cand QIr(I)
se apropie de P.
Fig.5
Definitia
5 Un punct P=r(t) al curbei G
se numeste punct regulat daca in
acest punct ![]() . Daca
. Daca ![]() , tII,
atunci curba G
se numeste curba regulata.
, tII,
atunci curba G
se numeste curba regulata.
Definitia
6 Fie un punct P regulat al curbei G.
Dreapta care trece prin P si are ca vector director pe ![]() se numeste tangenta
la G
in punctul P (fig.6).
se numeste tangenta
la G
in punctul P (fig.6).
Planul care trece prin P si are ca
vector normal pe ![]() se numeste plan normal
la curba G
in punctul P (fig.6).
se numeste plan normal
la curba G
in punctul P (fig.6).
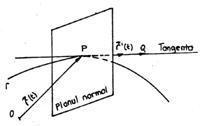
Fig.6
Fie Q(X,Y,Z) punctul curent de pe
tangenta in P(x,y,z)IG
unde G:
![]()
![]() , tII.
Daca
, tII.
Daca ![]() atunci
atunci ![]() tII. Scriind ca
tII. Scriind ca ![]() obtinem ecuatia
vectoriala a tangentei:
obtinem ecuatia
vectoriala a tangentei:
![]() (5)
(5)
unde
![]() sau echivalent:
sau echivalent:
![]() (6)
(6)
Fie acum M(x,y,z) punctul curent din
planul normal la ![]() in P. Avem
in P. Avem ![]() deci planul normal:
deci planul normal:
![]() (7)
(7)
unde
![]() . (8)
. (8)
Trecand la coordonate in (7) obtinem ecuatia carteziana:
![]() (9)
(9)
Definitia
7 Un punct P=r(t)IG=r(I)
corespunzator unei valori a lui t pentru care ![]() se numeste punct singular a curbei G.
Daca exista m>1 astfel ca:
se numeste punct singular a curbei G.
Daca exista m>1 astfel ca:
![]() si
si ![]()
atunci punctul P corespunzator se numeste punct singular de ordinul m. In vecinatatea unui punct singular de ordinul m formula TAYLOR da:
![]() (10)
(10)
cu
![]()
Daca notam P=r(t) si Q=r(t+h) din (10) obtinem:
![]() (11)
(11)
Vectorii ![]() si
si ![]() au originea in O, iar
vectorii
au originea in O, iar
vectorii ![]() au origine in P
(extremitatea lui
au origine in P
(extremitatea lui ![]() ).
).
Definitia
8 Vectorul ![]() se numeste vector
tangent la curba G
in punctul singular P de ordinul m, al curbei. Dreapta care trece prin P si are
vectorul director
se numeste vector
tangent la curba G
in punctul singular P de ordinul m, al curbei. Dreapta care trece prin P si are
vectorul director ![]() se numeste tangenta la
G
in P iar planul care trece prin P si are ca vector normal pe
se numeste tangenta la
G
in P iar planul care trece prin P si are ca vector normal pe ![]() se numeste plan normal la G
in punctul P.
se numeste plan normal la G
in punctul P.
Fie ![]() , r : I R3
si G=r(I),
, r : I R3
si G=r(I),
![]() un punct singular de
ordinul m al curbei G,
prima derivata nenula (in acest punct) este,
un punct singular de
ordinul m al curbei G,
prima derivata nenula (in acest punct) este,
dupa definitia precedenta,
![]() , tII (12)
, tII (12)
Deci ecuatiile tangentei si a planului normal intr-un punct singular de ordinul m al curbei sunt:
Tangenta:
![]() (13)
(13)
Planul normal:
![]() (14)
(14)
Pe o curba data ![]() =r(I) presupusa multime convexa se pot stabili doua si numai
doua sensuri de parcurs intelegand prin sens de parcurs pe G
ordinea de parcurgere a punctelor lui G,
ordine ce corespunde ordinei de parcurgere a lui I.
=r(I) presupusa multime convexa se pot stabili doua si numai
doua sensuri de parcurs intelegand prin sens de parcurs pe G
ordinea de parcurgere a punctelor lui G,
ordine ce corespunde ordinei de parcurgere a lui I.
Definitia 9 O curba G pe care s-a ales un sens de parcurs se numeste curba orientata.
Daca G=r(I)
este o curba regulata este natural sa luam ca sens pozitiv pe curba sensul (de
pe curba) coerent cu sensul vectorului tangent ![]() si deci coerent cu
sensul pozitiv pe tangenta (fig.7).
si deci coerent cu
sensul pozitiv pe tangenta (fig.7).
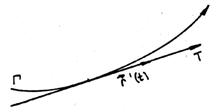
Fig.7
2.2 Curbe date implicit
Fie
![]() (15)
(15)
Fie P(x,y,z) un punct regulat al
curbei G.
In ipoteza ![]() in P, pe baza teoremei
functiilor implicite, sistemul F(x,y,z)=0, G(x,y,z)=0 defineste doua finctii x y(x),
x z(x)
intr-o vecinatate I a punctului P1(x) cu x -abscisa lui P, pentru
care:
in P, pe baza teoremei
functiilor implicite, sistemul F(x,y,z)=0, G(x,y,z)=0 defineste doua finctii x y(x),
x z(x)
intr-o vecinatate I a punctului P1(x) cu x -abscisa lui P, pentru
care:
 (16)
(16)
sau echivalent:
 (17)
(17)
Relatiile (17) atesta ca vectorul tangent in P(x,y,z) la G
![]() (18)
(18)
este coliniar cu:
![]() (19)
(19)
deci
vectorul ![]() dat de (19) este un vector director al tangentei la G
in P(x,y,z). Prin urmare tangenta si planul normal au respectiv ecuatiile:
dat de (19) este un vector director al tangentei la G
in P(x,y,z). Prin urmare tangenta si planul normal au respectiv ecuatiile:
![]() (20)
(20)
![]() (21)
(21)
Trecand la coordonate in (20) si (21) obtinem ecuatiile carteziene in P(x,y,z)IG
 (22)
(22)
![]()
![]() (23)
(23)
3 . Binormala si planul osculator
Definitia
10 Fie curba  . Se numeste punct biregulat al curbei G
un punct P=r(t0) in care vectorii
. Se numeste punct biregulat al curbei G
un punct P=r(t0) in care vectorii ![]() si
si ![]() nu sunt coliniari
adica:
nu sunt coliniari
adica:
![]()
Exemplu.
Elipsa ![]() , are toate punctele biregulate.
, are toate punctele biregulate.
Definitia
11 Planul care trece prin punctul P=r(t0) si e paralel cu
vectorii ![]() si
si ![]() se numeste plan osculator al curbei
se numeste plan osculator al curbei ![]() in punctul sau
biregulat
in punctul sau
biregulat ![]() .
.
Dreapta care trece prin punctul
biregulat P=r(t0)IG
si are ca vector director vectorul ![]() se numeste binormala la curba G
in P (fig.8).
se numeste binormala la curba G
in P (fig.8).
Teorema
2 Intr-un punct biregulat P=r(t0) al
curbei binomiala Bn
si planul osculator ![]() au ecuatiile:
au ecuatiile:
![]() , (24)
, (24)
![]() (25)
(25)
Demonstratie.
![]() avem
avem ![]() deci
deci
![]() . (26)
. (26)
Cum
![]() rezulta de aici ecuatia
(24). Fie acum
rezulta de aici ecuatia
(24). Fie acum ![]() , arbitrar. Vectorii
, arbitrar. Vectorii ![]() si
si ![]() sunt coplanari
sunt coplanari
![]() (27)
(27)
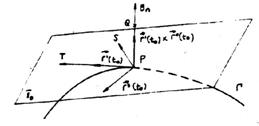
Fig.8
Denumire. O curba care are toate punctele sale intr-un plan se numeste curba plana.
Teorema
3 Daca o curba este plana atunci planul osculator in orice punct al curbei
coincide cu planul curbei.
Demonstratie.
Fie curba plana si P
planul ei. Pentru orice ![]() vectorul
vectorul ![]() este coplanar cu
planul.
este coplanar cu
planul.
Rezulta ca si:
![]()
este
coplanar cu planul P.
Analog se arata ca ![]() este coplanar cu
planul P.
Cum
este coplanar cu
planul P.
Cum ![]() si
si ![]() au originea in punctul
au originea in punctul
 rezulta ca planul P
este planul osculator al curbei in punctul P. Cum punctul P este arbitrar,
rezulta ca planul P
este planul osculator in fiecare punct al curbei.
rezulta ca planul P
este planul osculator al curbei in punctul P. Cum punctul P este arbitrar,
rezulta ca planul P
este planul osculator in fiecare punct al curbei.
Definitia 12 Se numeste punct de inflexiune al unei curbe un punct al acesteia in care planul osculator nu este determinant.
Completari.
1) Se poate demonstra ca planul
osculator al curbei intr-un punct ![]() , este pozitia limita a unui plan care trece prin trei puncte
, este pozitia limita a unui plan care trece prin trei puncte
![]() de pe G
atunci cand
de pe G
atunci cand ![]() si
si ![]() . Rezulta ca planul osculator in M are cel putin trei puncte
comune cu
. Rezulta ca planul osculator in M are cel putin trei puncte
comune cu ![]() (confundate in M).
(confundate in M).
2) Daca curba G
este data prin ecuatiile ei parametrice, ![]() ,atunci planul osculator la G
in punctul sau biregulat M0(x0,y0,z0)
este definit de ecuatia carteziana:
,atunci planul osculator la G
in punctul sau biregulat M0(x0,y0,z0)
este definit de ecuatia carteziana:
 (28)
(28)
3) Daca ![]() atunci
atunci ![]() sau echivalent
sau echivalent ![]() ecuatii care
reprezinta o dreapta in spatiu (parametrul pe dreapta fiind
ecuatii care
reprezinta o dreapta in spatiu (parametrul pe dreapta fiind ![]() . Deci daca
. Deci daca ![]() in orice punct al
curbei G
atunci curba G
este o dreapta.
in orice punct al
curbei G
atunci curba G
este o dreapta.
4) Daca o curba G are toate punctele sale in planul osculator atunci curba este plana.
4 Triedrul lui Frenet pentru curbe de viteza unu
Fie  , o curba de viteza
unu
, o curba de viteza
unu ![]() .
.
Notam
![]() (29)
(29)
Rezulta ca ![]() deci
deci ![]() este vectorul
tangentei in
este vectorul
tangentei in ![]() . Din relatia (29) rezulta
. Din relatia (29) rezulta ![]() , de unde, prin derivare obtinem
, de unde, prin derivare obtinem ![]() , sau echivalent:
, sau echivalent:
![]()
Se poate demonstra ca o curba G reprezentata de functia
![]() (30)
(30)
se
incovoaie (se abate fata de tangenta in P la G)
in acelasi sens cu ![]() . Mai mult, incovoierea lui G
creste odata cu cresterea lui
. Mai mult, incovoierea lui G
creste odata cu cresterea lui ![]() . Astfel vectorul
. Astfel vectorul ![]() indica curbarea lui G
iar lungimea lui
indica curbarea lui G
iar lungimea lui ![]() da o masura numerica a
acestei curbari.
da o masura numerica a
acestei curbari.
Definitia
13 Functia ![]() definita prin relatia:
definita prin relatia:
k(s)=
![]() (31)
(31)
se numeste curbura curbei
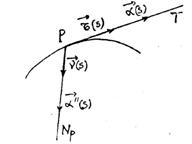
![]()
Fig.9
Pentru k nenul notam:
 (32)
(32)
![]()
Denumiri
Vectorul ![]() se numeste versorul normalei principale la G
in punctul
se numeste versorul normalei principale la G
in punctul ![]() . Tangenta in P si normala principala in P costituie planul
. Tangenta in P si normala principala in P costituie planul
![]() (fig.9) planul osculator al curbei G
in punctul P. Pentru controlul abaterii curbei de la planul osculator
(torsionare) in vecinatatea punctului
(fig.9) planul osculator al curbei G
in punctul P. Pentru controlul abaterii curbei de la planul osculator
(torsionare) in vecinatatea punctului ![]() se utilizeaza versorul
normal al acestui plan:
se utilizeaza versorul
normal al acestui plan:
![]() (33)
(33)
numit versorul binormalei curbei G in P.
Evident versorii ![]() sau ortogonali oricare
doi. Ansamblul:
sau ortogonali oricare
doi. Ansamblul:
![]()
se
numeste reper FRENET asociat curbei G
in punctul ![]() Acest reper determina
un triedru FRENET (triedru mobil) ale carui muchii se numesc respectiv:
tangenta, normala principala si binormala. Planele (fetele) acestui triedru se
numesc respectiv: planul normal
Acest reper determina
un triedru FRENET (triedru mobil) ale carui muchii se numesc respectiv:
tangenta, normala principala si binormala. Planele (fetele) acestui triedru se
numesc respectiv: planul normal![]() , planul osculator
, planul osculator ![]() si
si
planul
rectificant ![]() unde
unde ![]() (fig.10)
(fig.10)
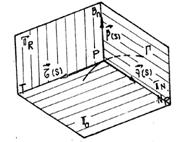
Fig.10
Formulele lui FRENET
Utilitatea reperului FRENET consta in
faptul ca derivatele ![]() se exprima cu ajutorul
lui
se exprima cu ajutorul
lui ![]() . In cele ce urmeaza vom pune in evidenta aceste expresii.
Astfel din:
. In cele ce urmeaza vom pune in evidenta aceste expresii.
Astfel din:
![]()
rezulta:
![]() (34)
(34)
Vom
arata acum ca ![]() este coliniar cu
este coliniar cu ![]() . Din relatia
. Din relatia
![]() (35)
(35)
Folosind ortogonalitatea lui ![]() si
si ![]() adica relatia
adica relatia ![]() obtinem prin derivare
obtinem prin derivare ![]() si inlocuind pe
si inlocuind pe ![]() prin
prin ![]() (relatia 34) rezulta:
(relatia 34) rezulta:
![]()
Cum ![]() avem
avem ![]() deci
deci ![]() adica :
adica :
![]() (36)
(36)
Din relatiile (35) si (36) rezulta ca ![]() este coliniar cu
este coliniar cu ![]() .
.
Definitia
4.2 Functia reala ![]() definita prin:
definita prin:
![]() (37)
(37)
se numeste torsiunea curbei (semnul '-' este luat prin conventie) K(s) poate fi numar pozitiv, nul sau negativ:
![]() (38)
(38)
Vom deduce acum expresia lui ![]() in baza ortogonala
in baza ortogonala ![]() . Aceasta este de forma urmatoare:
. Aceasta este de forma urmatoare:
![]() (39)
(39)
Din ![]() rezulta prin derivare
rezulta prin derivare ![]() deci, in (39), mai
raman de calculat coordonatele
deci, in (39), mai
raman de calculat coordonatele ![]() si
si ![]() . Pentru a calcula pe
. Pentru a calcula pe ![]() derivam in relatia
derivam in relatia ![]() . Obtinem astfel:
. Obtinem astfel:
![]() sau
sau ![]()
de unde rezulta:
![]() (40)
(40)
Derivand in relatia ![]() obtinem:
obtinem:
![]() (41)
(41)
Cu (40) si (41) obtinem din (39) :
![]() (42)
(42)
Am demonstrat astfel urmatoarea teorema:
Teorema
4 (formulele lui Frenet). Daca  este o curba cu viteza
unu avand curbura k>0 si torsiunea K atunci :
este o curba cu viteza
unu avand curbura k>0 si torsiunea K atunci :
![]() (43)
(43)
Formulele (43) ale lui Frenet
constituie un sistem de ecuatii diferentiale liniare. Cunoscand curbura k(s) si
torsiunea K(s), prin integrarea acestui sistem obtinem ![]() iar prin integrarea
relatiei
iar prin integrarea
relatiei ![]() obtinem
obtinem ![]() curba fiind astfel
determinata. Se poate demonstra ca efectul constantelor arbitrare ce intervin
in urma integrarii este o deplasare arbitrara si o schimbare a originii axelor.
Deci toate curbele care au aceeasi curba k(s) si torsiune K(s) pot fi suprapuse
printr-o deplasare; de aceea curbura si torsiunea se numesc elemente intrinseci ale curbei (ele
constituie invariatii fata de grupul deplasarilor).
curba fiind astfel
determinata. Se poate demonstra ca efectul constantelor arbitrare ce intervin
in urma integrarii este o deplasare arbitrara si o schimbare a originii axelor.
Deci toate curbele care au aceeasi curba k(s) si torsiune K(s) pot fi suprapuse
printr-o deplasare; de aceea curbura si torsiunea se numesc elemente intrinseci ale curbei (ele
constituie invariatii fata de grupul deplasarilor).
Observatie.
Daca pentru o curba G
curbura este nula (k=0) in toate punctele, integrand ecuatia ![]() rezulta
rezulta ![]() (
(![]() si
si ![]() vectori constanti) deci curba se reduce la un segment de
dreapta.
vectori constanti) deci curba se reduce la un segment de
dreapta.
5 Interpretarea si calculul curburii si a torsiunii
Fie curba regulata ![]() si punctele
si punctele ![]() . Notam cu
. Notam cu ![]() lungimea arcului
lungimea arcului ![]() si cu
si cu ![]() unghiul dintre
tangentele in M s
unghiul dintre
tangentele in M s![]() la curba (fig.11).
la curba (fig.11). ![]()
![]()
deci
![]()
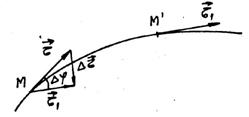
Fig.11
adica
![]() si deci curbura curbei
G
in punctul M este
si deci curbura curbei
G
in punctul M este
![]() (44)
(44)
Notand cu ![]() unghiul pe care-l face
tangenta intr-un punct oarecare al curbei cu o dreapta fixa, unghiul
unghiul pe care-l face
tangenta intr-un punct oarecare al curbei cu o dreapta fixa, unghiul ![]() este variatia
unghiului
este variatia
unghiului ![]() corespunzator variatiei
corespunzator variatiei
![]() a arcului. Din (44)
rezulta interpretarea curburii: curbura
unei curbe intr-un punct M este viteza de variatie a unghiului pe care-l face
tangenta la curbura cu o dreapta fixa. Deci marimea curburii intr-un punct
M arata 'cat de repede' se indeparteaza curba,in vecinatatea lui M,
de tangenta la curba in M.
a arcului. Din (44)
rezulta interpretarea curburii: curbura
unei curbe intr-un punct M este viteza de variatie a unghiului pe care-l face
tangenta la curbura cu o dreapta fixa. Deci marimea curburii intr-un punct
M arata 'cat de repede' se indeparteaza curba,in vecinatatea lui M,
de tangenta la curba in M.
Tinand seama de relatia de definitie (38)
a torsiunii se poate deduce ![]() formula analoga cu
formula analoga cu ![]() si de aici (conform cu
44) prin analogie, avem:
si de aici (conform cu
44) prin analogie, avem:
![]() (45)
(45)
adica torsiunea exprima viteza de variatie a unghiului pe care-l face binormala cu o dreapta fixa.
Definitia 14 Inversele R si T ale curburii k si torsiunii K se numesc respectiv raza de curbura si raza de torsiune a curbei in punctul considerat:
![]() (46)
(46)
Teorema 5
a) Daca ![]() atunci curbura:
atunci curbura:
![]() (47)
(47)
iar torsiunea:
 (48)
(48)
b)
Daca ![]() atunci curbura :
atunci curbura :
iar torsiunea:
Demonstratie
a) Din definitia curburii si din prima relatie (46) avem :
b)
![]()
si tinand seama de relatiile
![]() si
si ![]() rezulta
rezulta ![]()
Formulele (47) sunt deduse.
Pentru calculul torsiunii se inmultesc
scalar cu ![]() ambele parti ale relatiei
de definitie
ambele parti ale relatiei
de definitie ![]() ; se obtine astfel prima formula (48).
; se obtine astfel prima formula (48).
Pentru a deduce a doua formula (48) derivam in relatia :
![]() . Obtinem astfel:
. Obtinem astfel:
![]() adica:
adica:
![]()
Derivata lui ![]() o vom obtine din
o vom obtine din ![]() (49.)
(49.)
![]() deci :
deci :
![]()
Utilizand prima din formulele (48) vom obtine :

Cum
![]() rezulta
rezulta ![]() si totodata folosind 49
si totodata folosind 49
![]()
 (50)
(50)
Cum ![]() obtinem formula a doua
(68):
obtinem formula a doua
(68):
b) Daca  ne folosim de
reprezentarea naturala a curbei
ne folosim de
reprezentarea naturala a curbei ![]() .Functia
.Functia ![]() este derivabila si cu
derivata nenula deci admite inversa
este derivabila si cu
derivata nenula deci admite inversa ![]() , deci ecuatia devine:
, deci ecuatia devine:
![]() (51)
(51)
Din (51) rezulta
![]()
de unde:
![]() (52)
(52)
tinand seama ca produsul vectorial a doi vectori coliniari este nul. Prin trecere la modul in (52) obtinem:
![]()
si
tinand seama de (47) si de expresia derivatei functiei inverse,  , avem:
, avem:
 (53)
(53)
Cum dt>0 ![]() si
si ![]() din (53) obtinem
formula din enunt:
din (53) obtinem
formula din enunt:
 (54)
(54)
Pentru a obtine formula torsiunii in cazul cand
t fiind parametru
arbitrar, calculam si ![]() utilizand (52):
utilizand (52):
![]()
Efectuand produsul mixt al primelor
trei derivate ale functiei ![]() si tinand seama ca
daca doi vectori sunt coliniari produsul mixt format cu ei si cu un alt vector
este nul, obtinem:
si tinand seama ca
daca doi vectori sunt coliniari produsul mixt format cu ei si cu un alt vector
este nul, obtinem:

Inlocuind produsul mixt din (48) cu expresia gasita si pe R din (47) obtinem:
adica avem:
![]()
ceea ce trebuia demonstrat.
Aplicatii
1. Alte expresii ale versorilor triedrului Frenet.
Daca
in (74) inlocuim ![]() obtinem:
obtinem:
![]()
si cum
![]() si
si 
 (55)
(55)
deci
versorul ![]() este coliniar cu
este coliniar cu ![]() ceea ce ne permite sa
scriem:
ceea ce ne permite sa
scriem:
 , (56)
, (56)
Deci daca , reperul Frenet intr-un punct M biregulat al curbei este:
 (57)
(57)
Torsiunea curbei plane
Teorema
6 Daca torsiunea k=0 in fiecare
punct al curbei ![]() , atunci curba G
este plana.
, atunci curba G
este plana.
Demonstratie
Din
![]() rezulta
rezulta ![]() =0 deci
=0 deci ![]() este constanta: (
este constanta: (![]() =vector constant).
Cum planul osculator este perpendicular pe binormala rezulta ca planele
osculatoare in punctele lui G
sunt paralele. Pentru a arata ca G
e curba plana e
=vector constant).
Cum planul osculator este perpendicular pe binormala rezulta ca planele
osculatoare in punctele lui G
sunt paralele. Pentru a arata ca G
e curba plana e
suficient
sa aratam ca ![]() , planul osculator trece printr-un punct fix, anume prin a(0)
(fig.12). Consideram in acest scop functia
, planul osculator trece printr-un punct fix, anume prin a(0)
(fig.12). Consideram in acest scop functia ![]() avem:
avem:
![]()
si
deci ![]() de unde rezulta ca
f(s)=constant.
de unde rezulta ca
f(s)=constant. ![]() gasim f(s)=0. Astfel:
gasim f(s)=0. Astfel:
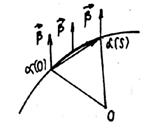
Fig.12
![]() este coplanar cu
planul osculator in
este coplanar cu
planul osculator in
a(s);
cum ![]() rezulta
rezulta ![]() .
.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2389
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved