| CATEGORII DOCUMENTE |
| Astronomie | Biofizica | Biologie | Botanica | Carti | Chimie | Copii |
| Educatie civica | Fabule ghicitori | Fizica | Gramatica | Joc | Literatura romana | Logica |
| Matematica | Poezii | Psihologie psihiatrie | Sociologie |
Metoda simplex de rezolvare a unui program liniar standard
Fie programul standard
|
(S) |
| |
|
| ||
|
|
cu notatiile din paragraful
1. Daca vectorii coloana ai matricei ![]()
![]() formeaza o baza in
formeaza o baza in ![]() , atunci
, atunci ![]() se numesc coordonate bazice (variabile de
baza). Matricea
se numesc coordonate bazice (variabile de
baza). Matricea ![]() poate fi descompusa in doua submatrice
poate fi descompusa in doua submatrice ![]() formata din vectorii
formata din vectorii ![]() si
si ![]() formata cu celelalte coloane, deci:
formata cu celelalte coloane, deci:
|
|
si analog
|
|
iar forma standard se scrie
|
| |
|
| |
|
|
Facand calculele, rezulta
|
| |
|
| |
|
|
O solutie a sistemului (4.9) este
|
|
Luand
aici ![]() obtinem o solutie de baza pentru (4.9.) si
anume
obtinem o solutie de baza pentru (4.9.) si
anume
|
|
Daca ![]() spunem ca baza
spunem ca baza ![]() este primal admisibila. Daca vectorul
este primal admisibila. Daca vectorul ![]() (
(![]() ) are
aceste componente in raport cu baza B iar
) are
aceste componente in raport cu baza B iar ![]() ,
,
|
|
cu ![]() .
.
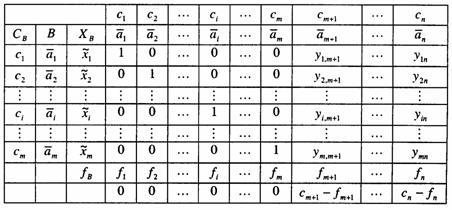
Dispunand de o baza primal admisibila se intocmeste tabelul simplex in care trecem:
a) solutia ![]()
b) ![]()
c) ![]() valoarea functiei obiectiv corespunzatoare
solutiei de baza.
valoarea functiei obiectiv corespunzatoare
solutiei de baza.
d) ![]() care reprezinta
coordonatele vectorilor
care reprezinta
coordonatele vectorilor ![]() ,
, ![]() in baza
in baza ![]() . daca
. daca ![]() este baza canonica
este baza canonica ![]() sunt coeficientii din sistemul de restrictii
dat.
sunt coeficientii din sistemul de restrictii
dat.
e)
se calculeaza ![]()
f)
se calculeaza diferentele 
Un astfel de tabel
simplex, considerand ca ![]() , arata deci sub forma:
, arata deci sub forma:
In
continuare se aplica testul de optimalitate al solutiei ![]() si bazat pe urmatoarele teoreme pe care le dam
fara demonstratie si anume:
si bazat pe urmatoarele teoreme pe care le dam
fara demonstratie si anume:
Teorema 4.1. Daca ![]() pentru toti
pentru toti ![]() , problema
de programare liniara are optim finit si
, problema
de programare liniara are optim finit si ![]()
Teorema 4.2. Daca pentru
un indice ![]() pentru care
pentru care ![]() toate componentele
toate componentele ![]() , programul
are optim infinit.
, programul
are optim infinit.
a. Daca toti ![]()
![]() atunci
atunci ![]() este solutia optima si
este solutia optima si ![]()
b. Daca exista cel putin o
diferenta ![]() atunci solutia nu
este optima. In acest caz exista urmatoarele posibilitati:
atunci solutia nu
este optima. In acest caz exista urmatoarele posibilitati:
a. Fie ![]() asa incat
asa incat ![]() si daca toti
si daca toti ![]()
![]() , problema nu are optim finit.
, problema nu are optim finit.
b. Fie ![]() cu
cu ![]() si exista cel
putin un
si exista cel
putin un ![]() , atunci solutia poate fi imbunatatita.
, atunci solutia poate fi imbunatatita.
Se trece la prima iteratie prin care se determina vectorul care intra in baza si vectorul care iese din baza. Indicele k al vectorului care intra in baza ne este dat de:
|
|
iar indicele h al vectorului care iese din baza este dat de:
|
|
In acest mod vectorului ![]() din baza ii ia locul vectorul
din baza ii ia locul vectorul ![]()
Se stabileste elementul pivot ykh ykh si se recalculeaza toate elementele tabloului simplex si se obtine o noua solutie de baza. Daca aceasta solutie nu este optima se trece la iterata urmatoare.
Exemplul 4.1 Sa se rezolve problema de programare liniara
![]()
![]()
![]()
Solutie
![]() ,
, ![]() .
.
Vectorii ![]() si
si ![]() formeaza o baza.
formeaza o baza.
Variabilele bazice sunt ![]() si
si ![]() .
.
Alcatuim tabelul simplex:
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
| |||||||
|
|
| ||||||
|
| |||||||
Cea mai mare diferenta pozitiva este c1 - f1 = 3 si avem yi1 > deci solutia poate fi imbunatatita.
In baza va intra vectorul ![]() Pentru a vedea ce vector iese in baza calculam
Pentru a vedea ce vector iese in baza calculam
![]()
deci din baza iese vectorul ![]() . Pivotul
este 4.
. Pivotul
este 4.
Tabelul simplex din iterata urmatoare este:
|
| |||||||
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
| ||||||
|
| |||||||
|
| |||||||
Mai avem o diferenta ![]() pozitiva deci in baza intra vectorul
pozitiva deci in baza intra vectorul ![]() si iese vectorul
si iese vectorul ![]() deoarece pe coloana lui
deoarece pe coloana lui ![]() avem o singura coordonata pozitiva 3/2.
Pivotul este 3/2. Tabloul simplex in iterata urmatoare este:
avem o singura coordonata pozitiva 3/2.
Pivotul este 3/2. Tabloul simplex in iterata urmatoare este:
|
| |||||||
|
|
|
|
|
|
|
|
|
|
| |||||||
|
| |||||||
|
| |||||||
|
| |||||||
Avem
doua diferente ![]() pozitive dar pe coloanele lor ele-mentele
pozitive dar pe coloanele lor ele-mentele ![]() transformate sunt negative deci problema nu
are optim finit.
transformate sunt negative deci problema nu
are optim finit.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2567
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved