| CATEGORII DOCUMENTE |
| Astronomie | Biofizica | Biologie | Botanica | Carti | Chimie | Copii |
| Educatie civica | Fabule ghicitori | Fizica | Gramatica | Joc | Literatura romana | Logica |
| Matematica | Poezii | Psihologie psihiatrie | Sociologie |
REPER CARTEZIAN
1. Reper cartezian in spatiul punctual euclidian E3
Fie
O un punct fixat din E3 numit origine in E3 si o baza
ortonormata ![]() in V3.Fiecarui
punct P
in V3.Fiecarui
punct P ![]() E3 ii
corespunde un vector unic
E3 ii
corespunde un vector unic ![]() numit vector de pozitie
a lui P fata de originea O. Acestui vector
numit vector de pozitie
a lui P fata de originea O. Acestui vector ![]() ii corespunde un
triplet ordonat unic (x,y,z)
ii corespunde un
triplet ordonat unic (x,y,z) ![]() R3 astfel incat
R3 astfel incat ![]() . Numerele reale x,y,z se numesc in acest caz coordonatele
euclidiene ale vectorului
. Numerele reale x,y,z se numesc in acest caz coordonatele
euclidiene ale vectorului ![]() in raport cu baza
ortonormata
in raport cu baza
ortonormata ![]() . In baza celor doua corespondente biunivoce: P
. In baza celor doua corespondente biunivoce: P![]()
![]() si
si ![]()
![]() (x,y,z)
(x,y,z) ![]() R3 rezulta ca E3 si R3 sunt
in corespondenta biunivoca. Mai mult, spatiile V3 si R3
sunt izomorfe, izomorfismul fiind unic determinat prin fixarea bazei.
R3 rezulta ca E3 si R3 sunt
in corespondenta biunivoca. Mai mult, spatiile V3 si R3
sunt izomorfe, izomorfismul fiind unic determinat prin fixarea bazei.
Definitia 1.
Ansamblul ![]() se numeste reper cartezian in E3.
Punctul O se numeste originea reperului,
iar
se numeste reper cartezian in E3.
Punctul O se numeste originea reperului,
iar ![]() se numeste baza reperului. Coordonatele euclidiene
(x,y,z) ale vectorului de pozitie
se numeste baza reperului. Coordonatele euclidiene
(x,y,z) ale vectorului de pozitie ![]() se numesc coordonatele carteziene ale punctului P
fata de reperul cartezian
se numesc coordonatele carteziene ale punctului P
fata de reperul cartezian ![]() si notam P(x,y,z);
si notam P(x,y,z); ![]() abscisa,
abscisa, ![]() = ordonata,
= ordonata, ![]() = cota.
= cota.
Bijectia
dintre E3 si R3 determinta prin fixarea reperului
cartezian se numeste functie de coordonate carteziene pe E3 iar sistemul de scalari
(x,y,z) asociat lui P prin functia de coordonate carteziene se numeste sistem de coordonate cartezian, al lui
P fata de reperul cartezian![]() .
.
Dreptele
suport Ox, Oy, Oz ale versorilor ![]() pe care luam ca sens,
sensul versorilor respectivi se numesc axele
de coordonate ale reperului cartezian
pe care luam ca sens,
sensul versorilor respectivi se numesc axele
de coordonate ale reperului cartezian ![]() . Evident ele sunt reciproc ortogonale. Uneori reperul
cartezian il indicam prin notatia Oxyz. Coordonatele carteziene ale punctului P
reprezinta marimile algebrice ale proiectiilor ortogonale ale vectorului
. Evident ele sunt reciproc ortogonale. Uneori reperul
cartezian il indicam prin notatia Oxyz. Coordonatele carteziene ale punctului P
reprezinta marimile algebrice ale proiectiilor ortogonale ale vectorului ![]() pe cele trei axe de
coordonate (fig.1).
pe cele trei axe de
coordonate (fig.1).
Axele sunt caracterizate prin ecuatiile:
![]()
Cele trei axe de coordonate determina trei plane xOy, yOz, zOx numite plane de coordonate. Ecuatiile lor sunt:
xOy : z = 0, yOz : x =0, zOx : y = 0

Fig. 1.
In
cele ce urmeaza presupunem ca V3 este raportat la baza ortonormata ![]() iar E3 la
reperul cartezian
iar E3 la
reperul cartezian ![]() .
.
2. Schimbari de repere carteziene
(rotatia,translatia,simetria)
In unele probleme de geometrie analitica se prefera sa se inlocuiasca un reper cartezian cu altul in care ecuatiile curbelor sau suprafetelor sa se scrie mai simplu. Schimbarile de repere carteziene din E3 sunt determinate de functii surjective care sunt transformari liniare ce pastreaza distanta euclidiana. Din acest motiv ele se mai numesc si izometrii. Multimea izometriilor formeaza un grup cu ajutorul caruia se introduce in spatiul punctual E3 simetria in raport cu un plan, simetria in raport cu un punct si translatia.
Rotatia si simetriile sunt transformari liniare date prin matrice ortogonale. De aceea ele se mai numesc transformari ortogonale.
Orice izometrie I este un produs dintre o translatie T si o transformare ortogonala O, adica I =T∙O.
Fie
I=T∙O o izometrie determinata de reperele ![]() si
si ![]() . Izometria I se numeste pozitiva (deplasare) daca
. Izometria I se numeste pozitiva (deplasare) daca ![]() este reper drept si
negativa, antideplasare, in caz contrar.
este reper drept si
negativa, antideplasare, in caz contrar.
Translatiile si rotatiile sunt izometrii pozitive in timp ce simetriile in raport cu un punct si in raport cu un plan sunt izometrii negative.
2.1. Rotatia
Definitia 2.
Consideram doua repere carteziene ![]() si
si ![]() din E3,
orientate pozitiv (fig.2). Se numeste rotatie, R, a reperului
din E3,
orientate pozitiv (fig.2). Se numeste rotatie, R, a reperului ![]() in jurul
punctului fix O, trecerea de la reperul
in jurul
punctului fix O, trecerea de la reperul ![]() la reperul
la reperul ![]() .
.
Rezulta
ca rotatia R a reperului ![]() este echivalenta cu
trecerea de la baza ortonormata
este echivalenta cu
trecerea de la baza ortonormata ![]() la baza
la baza![]() .
.
Notam
A =[aij] matricea de trecere de la baza ortonormata ![]() la baza
la baza ![]() .
.
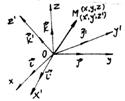
Fig. 2
 (1)
(1)
Intrucat
marimea algebrica a proiectiei unui vector ![]() pe un alt vector
pe un alt vector ![]() este egala cu produsul
scalar dintre primul vector (
este egala cu produsul
scalar dintre primul vector (![]() ) si versorul celuilalt, avem relatiile
) si versorul celuilalt, avem relatiile
 (2)
(2)
Din
conditiile pe care le verifica ![]() ,
,
![]() (3)
(3)
rezulta sase relatii independente intre elementele aij ale matricii
 (4)
(4)
Conditiile (3) constituie sase relatii independente adica nici una din relatiile (3) nu rezulta din celelalte cinci. Prin urmare si relatiile (4) obtinute din (3) prin trecerea la coordonate sunt relatii independente.
Efectuand inmultirea tAA si tinand seama de relatiile (4) obtinem
tAA =I ceea ce este echivalent cu
tA=A-1. (5)
Reamintim ca o matrice care indeplineste conditia 5 (sau echivalent,
conditiile 4) se numeste matricea ortogonala.
Trecerea
de la baza ortonormata ![]() la baza ortonormata
la baza ortonormata ![]() se face deci cu o
matrice ortogonala. Trecerea inversa se face cu tA.
se face deci cu o
matrice ortogonala. Trecerea inversa se face cu tA.
Consideram un punct arbitrar M din spatiul
punctual euclidian E3. Coordonatele lui M fata de reperul cartezian ![]() din E3 le
notam x,y,z iar fata de reperul cartezian
din E3 le
notam x,y,z iar fata de reperul cartezian ![]() . Pentru a gasi relatia de legatura intre cele doua sisteme
de coordonate observam ca
. Pentru a gasi relatia de legatura intre cele doua sisteme
de coordonate observam ca ![]() sau echivalent
sau echivalent
![]() . (6)
. (6)
Inlocuind pe ![]() prin expresiile lor
din baza
prin expresiile lor
din baza ![]() date de primele trei
relatii din (1) si grupand in membrul drept al relatiei (6) pe langa
date de primele trei
relatii din (1) si grupand in membrul drept al relatiei (6) pe langa ![]() obtinem
obtinem
 (7)
(7)
Inmultind in (7) cu tA si tinand
seama de faptul ca A este ortogonala (tA∙A =I) obtinem relatia
care da trecerea inversa (de la ![]() la
la ![]() ):
):
 (8.)
(8.)
Relatiile (7) si (8) caracterizeaza o izometrie care pastreaza originea. O izometrie data de aceste relatii se numeste transformare ortogonala. Trecand la determinanti in relatia tA∙A =I obtinem (det A)2=1 sau det A =1. Daca det A =+1 izometria este pozitiva (rotatie) iar daca det A =-
izometria este negativa(rotatie si simetrie).
Observatii
1. Relatiile (7) dintre coordonate se pot
gasi si in alt mod: inmultind pe rand in (6) scalar cu ![]() si tinand seama de
relatiile (2).
si tinand seama de
relatiile (2).
2. Cele sase relatii (4) fiind independente intre ele, rezulta ca dintre cei noua coeficienti aij care caracterizeaza o rotatie numai trei coeficienti sunt esentiali. Deci o rotatie intr-un spatiu depinde doar de trei parametri adica poate fi data prin trei conditii.
Caz particular : rotatia in jurul lui Oz.
Consideram rotatia R de unghi ![]() in jurul lui Oz a
reperului
in jurul lui Oz a
reperului ![]() (fig. 3). in
acest caz avem
(fig. 3). in
acest caz avem

Fig.3

Fie
x,y,z si ![]() coordonatele unui
punct M fata de reperele Oxyz si Ox'y'z' respectiv. Rotatia in jurul lui Oz
este caracterizata de relatiile
coordonatele unui
punct M fata de reperele Oxyz si Ox'y'z' respectiv. Rotatia in jurul lui Oz
este caracterizata de relatiile![]() .
.
Determinantul matricii rotatiei R fiind egal cu 1, R este o izometrie pozitiva.
Consideram planul xOy. O rotatie in planul xOy de unghi q in jurul originii este caracterizata prin ecuatia
![]()
sau echivalent
![]()
2.2 Translatia
Definitia 3. Consideram doua repere
carteziene ![]() si
si ![]() cu O
O'. Trecerea de la reperul
cu O
O'. Trecerea de la reperul ![]() la reperul
la reperul ![]() se numeste translatie
spatiala de vector
se numeste translatie
spatiala de vector ![]() (fig.4).
(fig.4).

Fig.4
Evident,
fiecare punct de pe axele Ox, Oy, Oz
descrie un vector segment orientat ce-l reprezinta pe ![]() . Fie
. Fie
![]() =
=![]()
Vectorul ![]() se numeste vectorul
translatiei.
se numeste vectorul
translatiei.
Prin urmare:
![]()
![]()
![]() ,
,
unde O'(a,b,c) fata de Oxyz, ![]()
Fie
un punct arbitrar M![]() , M(x,y,z) fata de Oxyz si totodata M(x',y',z') fata de
O'x'y'z'. Pentru a deduce relatiile dintre coordonatele x,y,z si x',y'z' trecem
la coordonatele vectorilor in relatia evidenta
, M(x,y,z) fata de Oxyz si totodata M(x',y',z') fata de
O'x'y'z'. Pentru a deduce relatiile dintre coordonatele x,y,z si x',y'z' trecem
la coordonatele vectorilor in relatia evidenta
![]()
Aceasta devine
![]()
de unde
![]()
sau
![]()
In particular, translatia in planul xOy este caracterizata de relatiile
![]()
2.3. Roto-Translatia
Consideram
un reper Oxyz fata de care se cunosc pozitiile unui punct fix O'(a,b,c) si a
unui reper O'x'y'z'. Fie T translatia reperului Oxyz de vector ![]() .Prin aceasta
.Prin aceasta ![]()
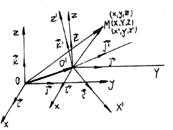
Fig.5
(fig.5) cu O'Z, O'Y, O'Z paralele si de acelasi sens cu Ox, Oy, Oz. Rezulta ca cele noua unghiuri formate de O' x', O'y', O'z' cu OX, OY, OZ sunt de fapt unghiurile pe care le formeaza acestea cu Ox, Oy, Oz respectiv. Cum
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2393
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved