| CATEGORII DOCUMENTE | ||
|
||
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
DOCUMENTE SIMILARE |
|
Progetto Cervo volante
Il progetto Cervo volante prevede di far funzionare un piccolo robot (il cervo volante) attraverso due soluzioni: console a comando radio, e programmazione pic.
Possiamo dunque dividere il progetto in tre fasi :
_Montaggio del Robot e studio dei motori
_Progettazione e costruzione della console a comando radio;
_Programmazione attraverso il pic.
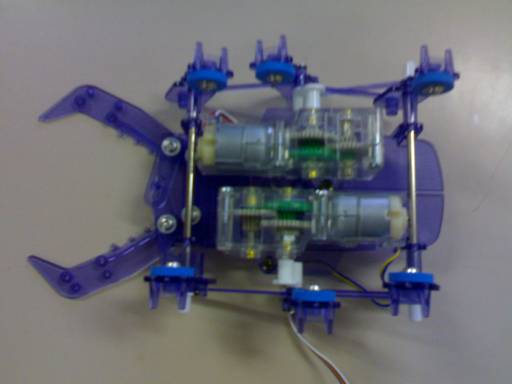
Montaggio del Robot
Questa fase č semplicemente caratterizzata dall’assemblaggio del robot fornito dal professore senza l’aggiunta di eventuali modifiche elencate sopra.
I motori sono alimentati da 1.5v ciascuno e sono dotati ognuno di una trazione la quale garantisce una potenza maggiore alle sei zampe di Cervo volante.
Le fasi di montaggio sono le seguenti in fotografia:
La console

La console e i motori collegati alle rispettive trazioni fissate sul corpo del robot

Aggiunta della pinze movibili

Il Cervo volante al completo
Grazie al collegamento con il primo motore le pinze situate sulla parte frontale del robot possono aprirsi e chiudersi mentre Cervo volante si muove.
Il funzionamento dei motori in cc di Cervo volante
Il classico motore in corrente continua ha una parte che gira detta appunto rotore o anche armatura e una parte che genera un campo magnetico fisso detta statore. Un interruttore rotante detto commutatore o collettore a spazzole inverte due volte ad ogni giro la direzione della corrente elettrica che percorre i due avvolgimenti generando un campo magnetico che entra ed esce dalle parti arrotondate dell'armatura. Nascono forze di attrazione e repulsione con i magneti permanenti fissi. (indicati con N ed S nelle figure).
La velocitŕ di rotazione dipende da:
La coppia generata č proporzionale alla corrente ed il controllo piů semplice agisce sulla tensione d'alimentazione. Il motore CC a magneti permanenti ha un comportamento reversibile: diventa un generatore di corrente continua se si collega un altro motore all'albero. Si puň allora prelevare l'energia elettrica prodotta collegandosi alle spazzole, inoltre da questo si puň intuire la sua capacitŕ di agire anche da freno e/o usato per il recupero dell'energia nei mezzi ibridi o essere semplificato come un semplice freno: applicando tra le spazzole un resistore l'energia meccanica trasmessa all'albero si dissipa su questo resistore). Riassumendo si puň affermare che il motore CC ha tutte le funzioni necessarie per un mezzo mobile: oltre alla funzione di motore puň recuperare l'energia funzionando da dinamo quando serve l'azione frenante o agire semplicemente da freno.
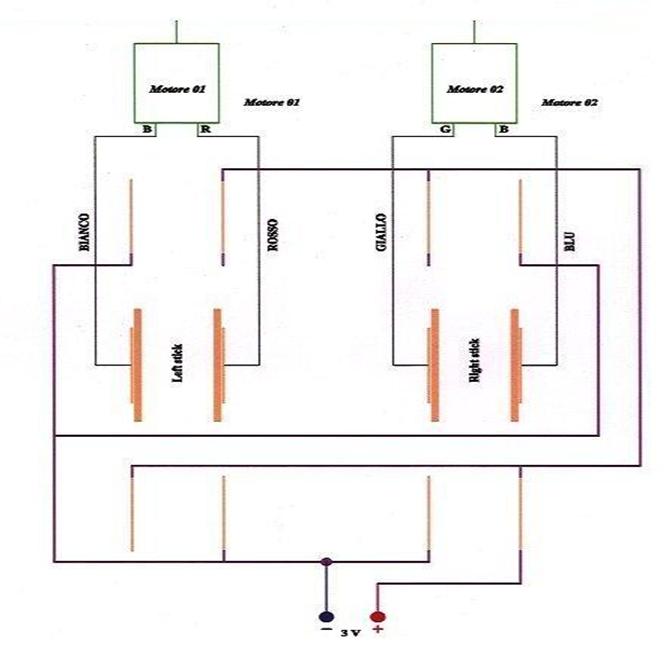
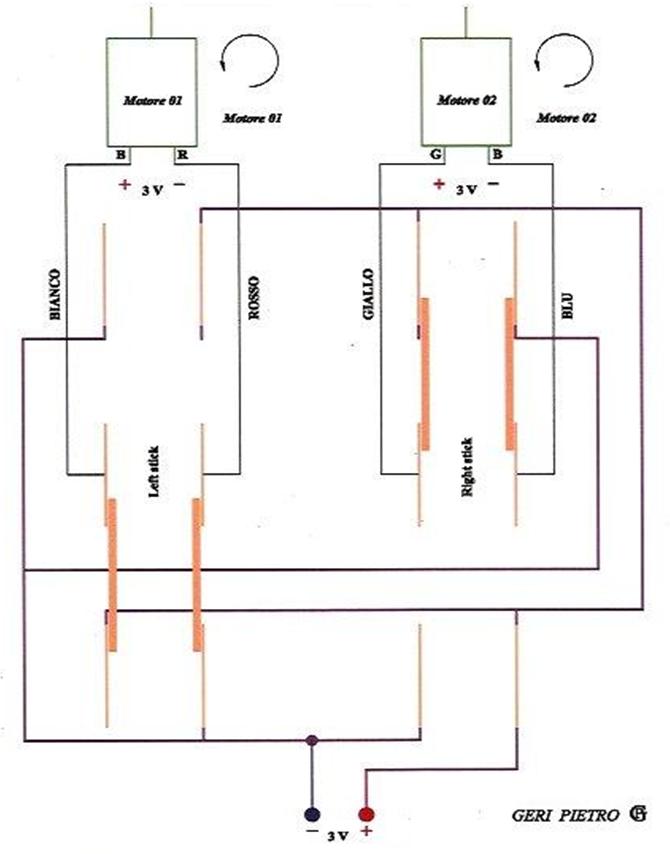
I movimenti di Cervo volante
Il robot č in grado di compiere piů movimenti grazie alle 2 levette installate sulla console che offrono 8 contatti diversi capaci di permettere a Cervo volante di dirigersi verso queste direzioni:
- robot fermo:
Le 2 levette non offrono alcun contatto perciň l’alimentazione non raggiunge i motori quindi rimangono fermi.
- Robot avanti :
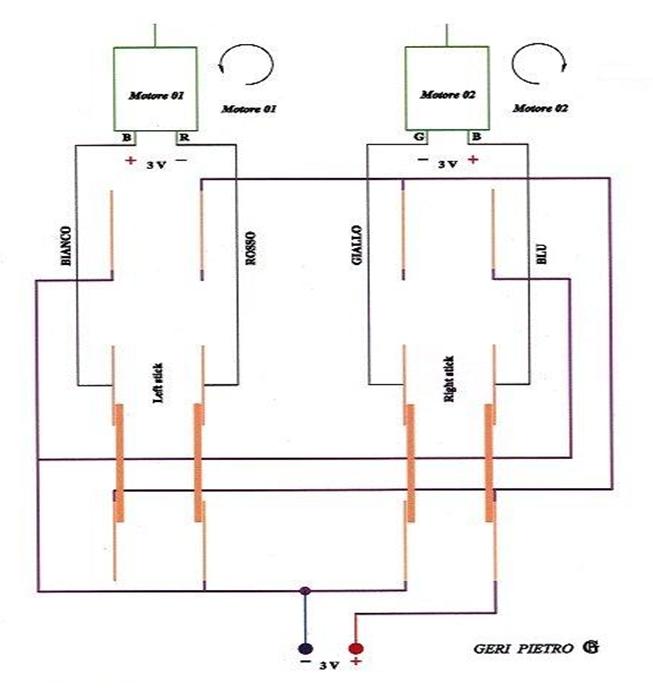
Robot indietro:
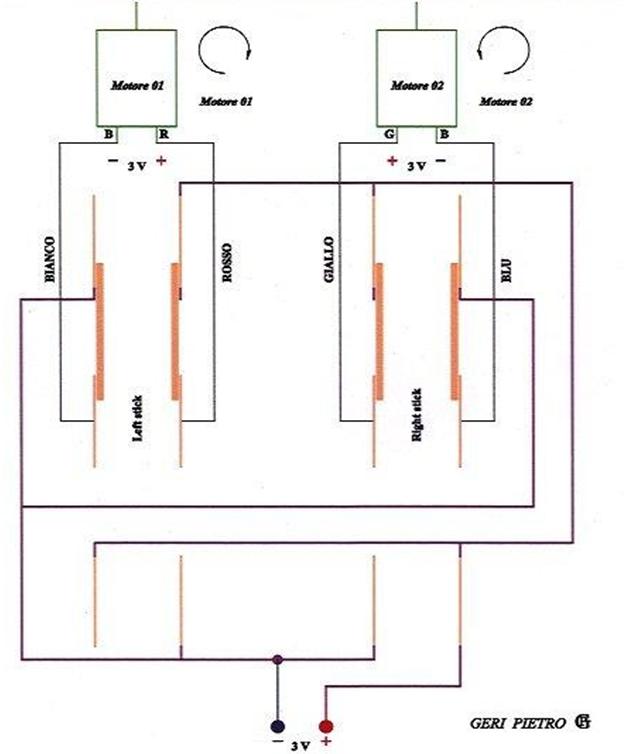
- Robot avanti sinistra:
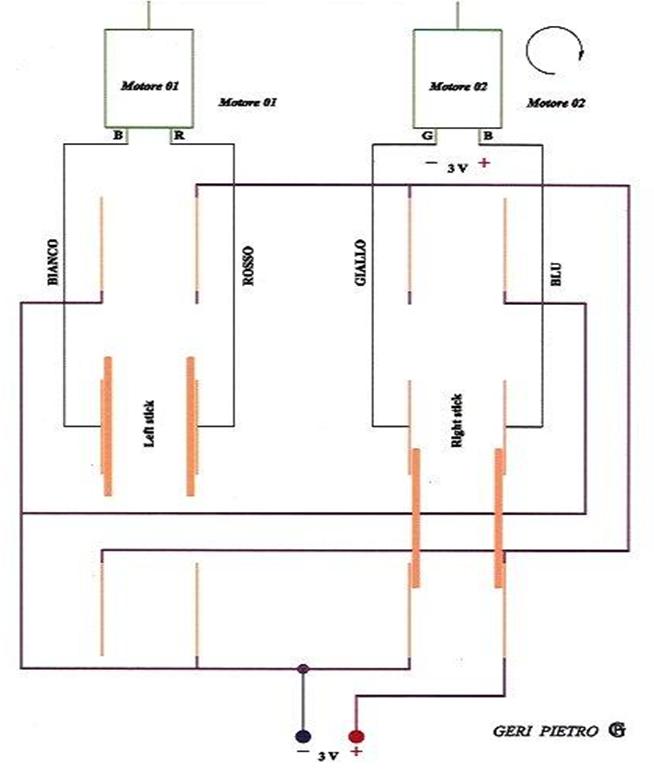
- Robot avanti destra:
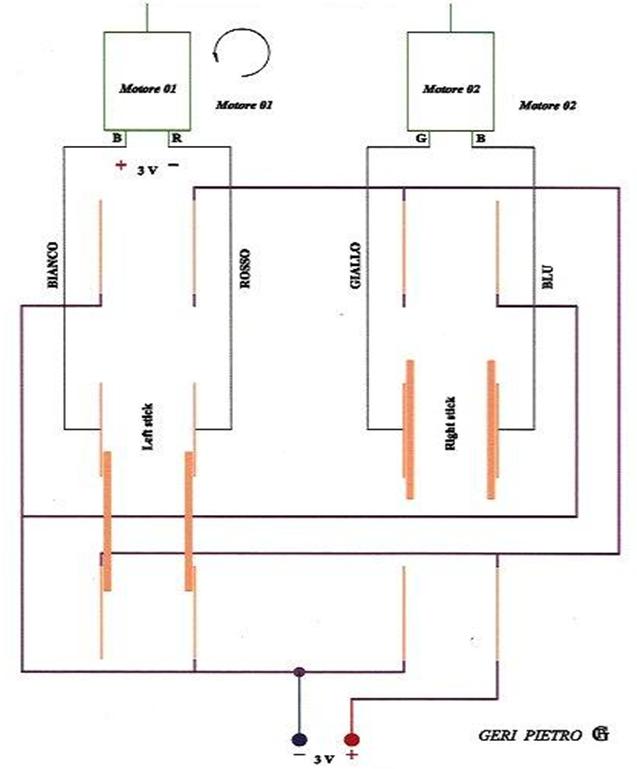
-Robot indietro sinistra:
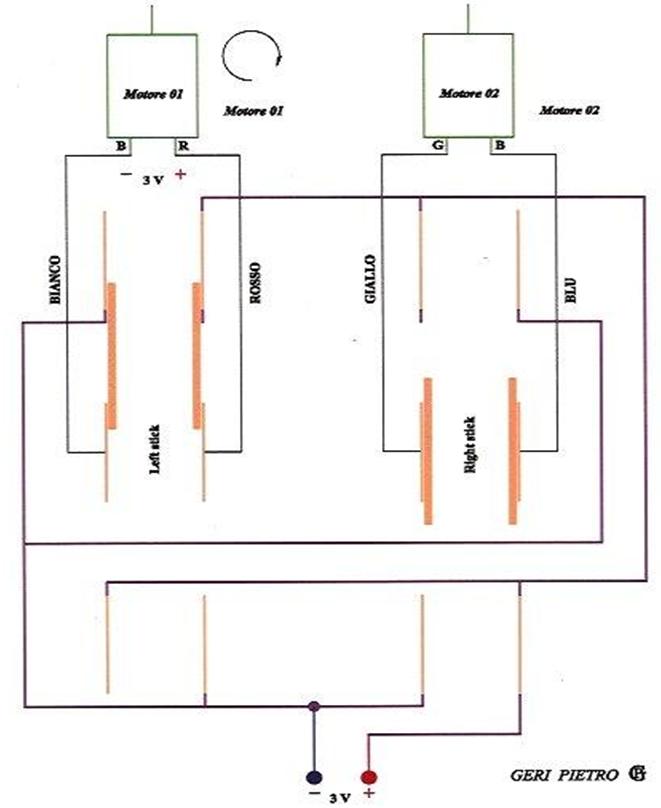
- Robot indietro destra:
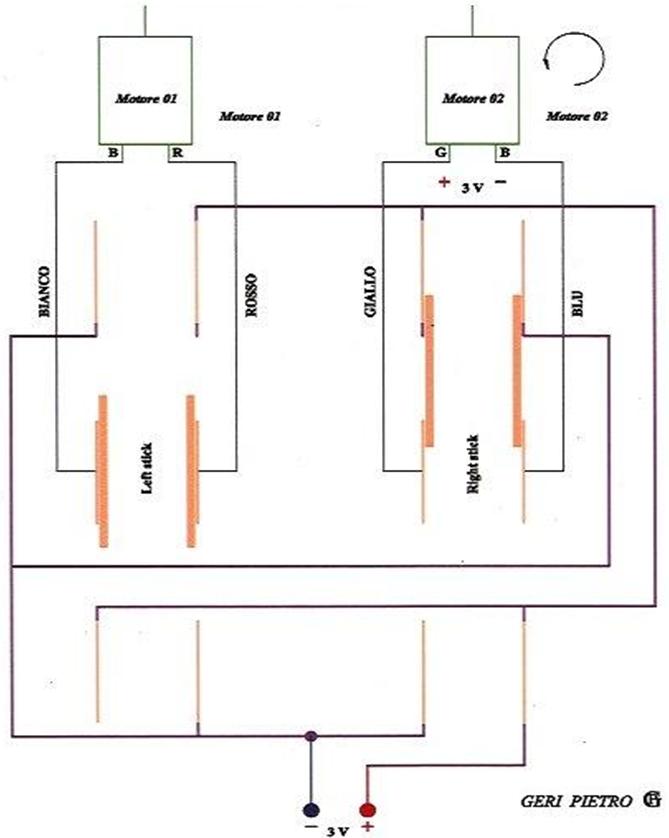
- Robot assiale sinistra:
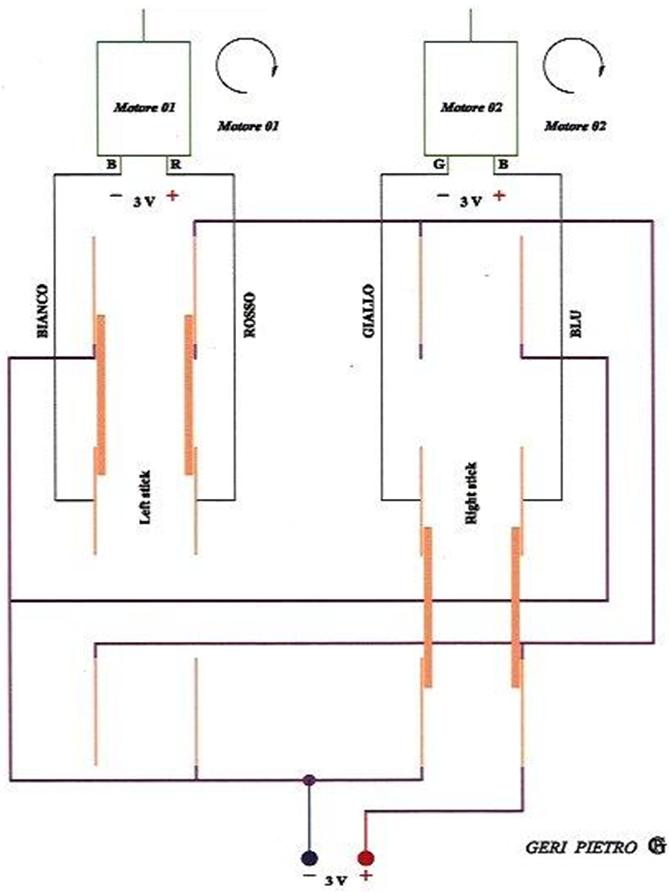
- Robot assiale destra:
Progettazione e costruzione della console a comando radio
Una volta studiato il comportamento del robot in base ai comandi forniti dalla prima console abbiamo potuto ideare il progetto del comando radio.
Il primo passo sarŕ ideare e costruire la radio ricevente che verrŕ montata sul corpo di Cervo volante.
Circuito elettronico Rr
Il circuito č costituito da:
- un regolatore di tensione ( L200) in grado di ridurre la tensione da 9 a 3 volt;
- una radio ricevente funzionante a 40 Mhz che abbiamo ricavato da una macchinina e che abbiamo applicato sulla Rtr . La radio ricevente utilizza la tensione a 3 volt fornita dal regolatore di tensione;
- due bobine che muovono i relč i quali forniscono i contatti necessari ai movimenti di Cervo Volante.
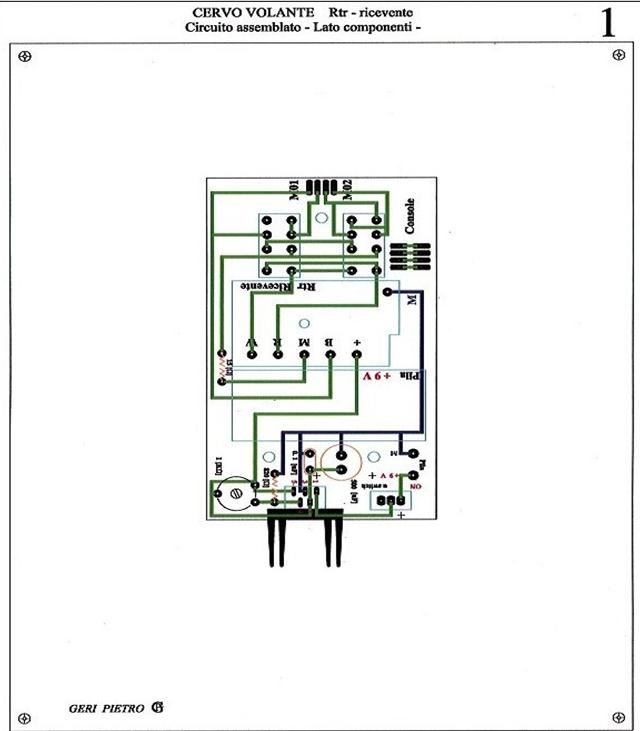
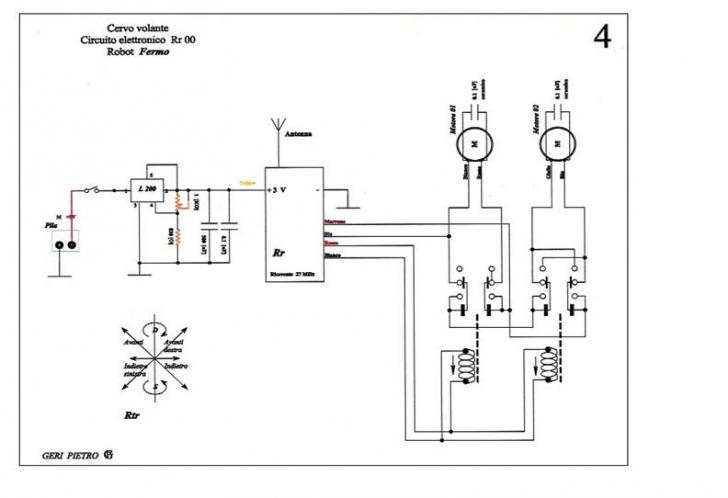 Circuito
assemblato Rtr ricevente
Circuito
assemblato Rtr ricevente
Il circuito č costituito dal regolatore di tensione ( L200 ), il supporto per inserire la radio ricevente e i relč.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2692
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved