| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
DOCUMENTE SIMILARE |
|
KOMPIUTERINIS ELEKTROPNEUMATINIS MODELIAVIMAS
Darbo tikslas: susipažinti su elektropneumatiniř elementř (elektriškai valdomř skirtytuvř, slëgio regiliatoriř, proporciniř skirstytuvř, srauto reguliatoriř, jungikliř bei manetiniř priartëjimo jutikliř) konstrukcija, veikimo principu ir išbandyti juos kaip veikia su FluidSIMRprograma
Užduotis:
Išnagrinëti ir trumpai aprašyti cilindrř A ir B judesio digramą ir valdymo poveikius joje.
Parinkti reikiamus elektropneumatinius elementus, susipažinti su jř veikimo principu ir stende sujungti 3pav. Parodytą schemą.
Paspaudus START mygtuką, išbandyti cilindrř valdymo schemą.
1pav. Dviejř pneumatiniř cilindrř suderinto valdymo judesio schema
Pradinëje bűsenoje abu pneumocilindrai yra sustabdyti. Pirmo takto metu pirmas pneumocilindras jungiamas „pirmyn“, antrasis – nejungiamas, pirmam pneumocilindrui pasiekus galinę padëtá, paveikiamas magnetinis herkoninis jutiklis J12, pirmojo pneumatinio cilindro kotas sustabdomas, antrojo išstumiamas. Antrojo cilindro kotui pasiekus galinę padëtá, paveikiamas jutiklis J22, artojo pneumatinio cilindro kotas stabdomas, pirmojo – átraukiamas. Pirmojo pneumatinio cilinro kotui paseikus pradinę padëti paveikia jutiklis J11, pirmojo pneumatinio cilindro kotas sustabdomas, antrojo átraukiamas, pasiekus galinę padëtá paveikia jutiklis J21.
Abiejř cilindrř pradines padëtis fiksuoja magnetiniai herkoniniai priartëjimo jutikliai J11 ir J2. Galines cilindrř A ir B padëtis fiksuoja herkoniniai priartëjimo jutikliai J12 ir J22. Cilindrui A ájungti spaudžiamas START mygtukas. Tada áveikiama pareiga T1, cilindrui A suformuojamas koto ištűmimo signalas, o po to prasideda 2as valdymo etapas. Toliau procesas vyksta nuosekliai pagal parodytą SFC diagramą.
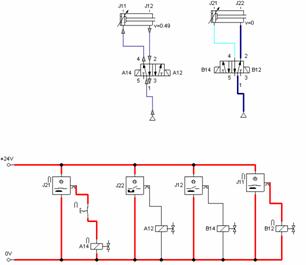
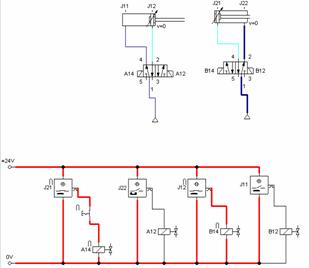
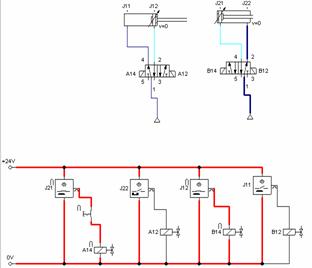
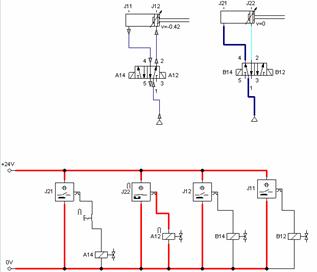
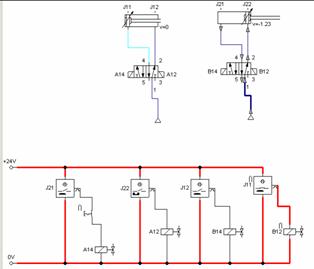
3pav. Dviejř cilindrř elektropneumatinë suderinto valdymo schema: a) – pneumatinë dalis; b) – elektrinë dalis
Elektropneumatinë schema iškaidyta á pneumatinę ir elektrinę dalis. Šios schemos pagalba realizuojami 1pav. pavaiduota judesio ir 2pav. SFC diagramos. Abiejř skirstytuvř elektromagnetai valdomi magnetiniř herkoniniř priartëjimo jutikliř išëjimo signalais.
Išvados: susipažinau su elektropnaumatiniř elmentř veikimo principu ir išbandžiau juos sujungti su FluidSIMR3 festo programa; version 3of/10 Pneumatic 04/20/2000. sujungus nurodyta schema ir paspaudus start mygtuka ekrane stebëjau dviejř pneumatiniř cilindrř suderinto valdymo judesá.

|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2050
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved