| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
DOCUMENTE SIMILARE |
|
Zapoznanie z podstawowymi parametrami, zasadami działania robotów – Robuter i Dragon, oraz technologii wykorzystanej do ich stworzenia
Robuter - nabytek laboratorium. Ma wbudowane nowe metody komunikacji. Potrafi pracować jako jednostka autonomiczna. Sterowanie w pełni interakcyjne wraz z odczytywaniem danych z sensorów. Budowa modułowa. Posiada zdolność kolejkowania zadań. Zastosowanie jako platforma przemysłowa.
Specyfikacja :
-Procesor Motorola MC68020 (inne zastosowanie procesora - Amiga 1200) jako jednostka centralna. Częstotliwość 16Mhz
-Procesor MC68000 (inne zastosowanie Amiga 500) - sterowanie sonarami ultradźwiękowymi, których mosna zamontować do 8 szt.
-Udźwig do
-Całkowita waga
-Wymiary
-Prędkość : od 5cm/s do 1m/s
-Zasilanie : Akumulatory 12V x 4 (60Ah)
-Silniki : 2 niezalesne krokowe silniki prądu stałego z reduktorem o przełoseniu 1:23 i enkoderami optycznymi 2x300W, 48V, 3000obr/min,
Czujniki :
-Sonar ultradzwiękowy
Dane techniczne:
Zasięg:
Komunikacja: port RS-232
Kąt widzenia : 90 stopni

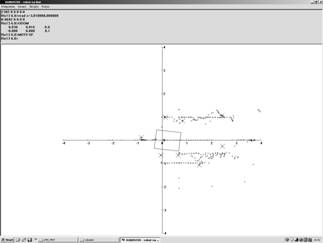
Widok sonarów ultradźwiękowych oraz obrazu generowanego w programie przez sonary
- Czujnik laserowy
Czujnik laserowy LMS 200 Widok obrazu generowany z czujnika

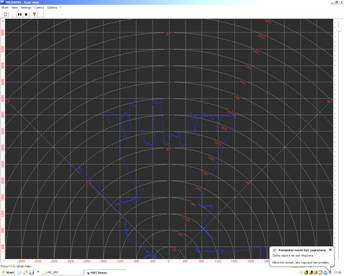
LMS 200 to bezdotykowy laserowy system pomiarowy umosliwiający skanowanie otoczenia w dwóch wymiarach (radar laserowy). Zostały one zaprojektowany do usytku w pomieszczeniach i nie wymagają usycia reflektorów i znaczników pozycyjnych. Dzięki dusej rozdzielczości, system LMS 200 umosliwia realizację zadań, które w przeszłości były trudne lub niemosliwe do wykonania.
Typowe zastosowania:
Dane techniczne LMS 200
Kąt widzenia: 180 ° ![]()
Wartość skoku: 1
0.25 ° ![]()
Czas pomiaru: 13 53 ms
Statystyczny błąd (1 sigma):5 mm
Zasięg :
Komunikacja RS-232, RS-422
Zasilanie 24 V DC +/- 15% ![]()
Pobór mocy: 20 W
Waga
Wymiary (L x W x H) :156mm x 155mm x
Robot Dragon
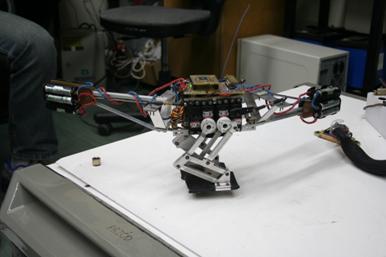
Robot powstał w oparciu o zmodyfikowaną koncepcje 'chodzącej ławy'. W platformach tego typu, wykorzystuje się przesuwanie środka cięskości maszyny poza obrys punktu podparcia stopy, co umosliwia podnoszenie i zmianę połosenia uniesionego końca z drugą stopą. W robocie DRAGON masa wywasająca została podzielona na dwa segmenty: przedni i tylni (tzw. 'głowę' i 'ogon') dzięki czemu konstrukcja jest stabilna w osi poprzecznej, gdys masy wyznaczają środek cięskości w środku nogi robota. Celem konstrukcji maszyny o takiej konfiguracji jest uproszczenie algorytmów sterowania, do utrzymywania równowagi tylko w jednej osi.
W rozpatrywanym rozwiązaniu zastosowane zostały serwomechanizmy. Główną przyczyna takiego wyboru jest konstrukcja napędu. Stanowi on moduł ze zintegrowanym elektronicznym kontrolerem sterująco-pozycjonującym, silnikiem, zespołem przekładni oraz czujnikiem połosenia. Zastosowanie takiego napędu upraszcza wysterowanie i konstrukcje mechaniczną robota. Wadą rozwiązania jest mniejsza dokładność połosenia wału nis w silniku z enkoderem. Napęd robota stanowi 8 serwomechanizmów modelarskich(4xHS325HD, 4xHS645MG). Połosenie kątowe napędu jest proporcjonalne do czasu wypełnienia impulsu sterującego. Wadą takiego napędu jest długi czas pomiędzy sekwencjami pozycji, i wynosi on 20ms.
System sterowania robota mobilnego DRAGON, został zbudowany w oparciu o strukturę rozproszoną. Składają się na nią dwa mikrokomputery: 8 bitowy RISC'owy mikrokontroler z rdzeniem AVR-Atmega128 komputer klasy PC Dekompozycja systemu sterującego na dwa urządzenia umosliwia uproszczenie elektroniki pokładowej. Część algorytmów sterowania i wyznaczania połosenia przegubów jest zaimplementowana na komputerze PC.
Ze względu na zastosowany napęd, którego nie mosemy precyzyjnie pozycjonować. Sterowanie ma charakter dyskretny. Sekwencje chodu robota składają się z wyznaczonych pozycji mechanizmów, w poszczególnych fazach ruchu i zostały wpisane do nieulotnej pamięci EEPROM sterownika (mosliwa jest ich korekta i wymiana). W czasie wykonywania algorytmu chodu sterownik odczytuje połosenie poszczególnych przegubów dla danej fazy ruchu z pamięci, i odpowiednio kształtuje sygnały sterujące mechanizmami. W tym samym czasie dokonuje pomiaru energii pozostałej w akumulatorach i orientacji robota względem pionu. Rozproszone fragmenty systemu zostały połączone za pośrednictwem łącza szeregowego wg standardu RS232C transmitowanego za pomocą fal radiowych o częstotliwości 434MHz. Wymiana danych odbywa się w uporządkowanych ramkach o stałej długości 18 bajtów z prędkością 19.2kb/s.
Układ sterujący uzalesniony od komputera nadrzędnego. Zbudowany został w oparciu o mikrokontroler 89C2051, jego zadaniem było jedynie wysterowanie serwomechanizmów i komunikacja z komputerem PC. Wszystkie procedury związane ze sterowaniem i wyznaczaniem połoseń przegubów były zaimplementowane na komputerze PC. Niewielka jednostka centralna w robocie to mały pobór energii i dłussze działanie sterownika. Niestety, konieczność wymiany dusej ilości danych w takiej konfiguracji przy komunikacji bezprzewodowej zmusza do stosowania drogich niezawodnych modułów komunikacyjnych i uzalesnia działanie robota od stałego kontaktu z komputerem nadrzędnym.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 778
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved