| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Sa se proiecteze schema de comanda pentru automatizarea unei unitati de incapsulat sticle.
Schema instalatiei este prezentata in figura 1.
Descrierea instalatiei si a ciclului de functionare
Un cilindru CA asigura rotatia platoului P, fiind comandat de doua distribuitoare DCA1, DCA2, pentru a asigura cele doua sensuri: AL (avans lucru), AR (avans revenire). In cursa de revenire, tija cilindrului CA nu actioneaza roata cu clichet ce antreneaza platoul P. Cursa de revenire dureaza pana cand este atins limitatorul b. In acel moment este comandata inversarea alimentarii cilindrului CA pentru a asigura cursa de lucru. Tija antreneaza cu un pas roata cu clichet. Initierea ciclului de functionare este permisa de apasarea pe butonul "p" (pornire), iar oprirea se face oricand prin actionarea butonului "o" (oprire). (Schema clasica de automentinere).
In momentul in care platoul a facut un pas, cilindrii de lucru C1 (pentru aplicat capsula) si C2 (pentru etansat capsula pe sticla) actioneaza tijele lor in situatia in care exista sticle la posturile de lucru 1, respectiv 2 (contactele c, d inchise). In caz afirmativ, cilindrii se deplaseaza in cursa de lucru, pana se inchid limitatoarele de cap de cursa f si g. In acecl moment se comanda revenirea capetelor de lucru si este permisa antrenarea platoului P cu un nou pas. Daca la nici unul din posturile de lucru nu exista sticla, dupa efectuarea unui nou pas dee catre platou se comanda in mod automat cursa de revenire a cilindrului CA (AR) si apoi cursa de lucru (AL), pentru efectuarea unui nou pas. Este utilizat in acest scop un releu temporizator RT, ales in asa fel incat sa poate furniza schemei un semnal mai lung decat timpul necesar inchiderii limitatoarelor de cap de cursa f si g de capatele ded lucru.
In proiect se vor trata separat (pentru simplificare) schema de comanda a avansului platoului si respectiv a actionarii cilindrilorde lucru C1 si C2.
1. Schema de comanda a avansului platoului P
Se utilizeaza schema de comanda din figura 2. Variabilele primare sunt a, b si t, iar variabilele de iesire E1 si E2.
Observatie: la stanibirea starilor interne in care se afla automatul trebuie sa se faca demarcatie intre o situatie de asteptare in cazul ca, dupa ce ce platoul s-a rotit cu un pas, exista sticla pe cel putin unul din cele doua posturi de lucru si o situatie de initiere a unui nou pas de rotatie al platoului P.
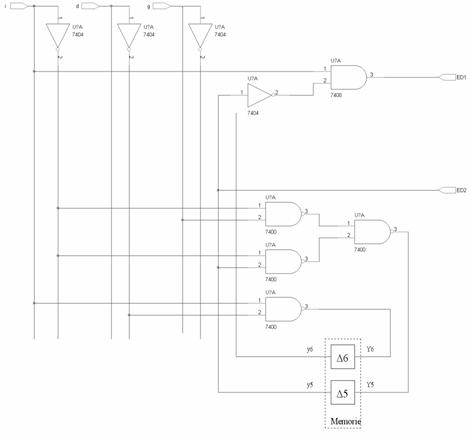
2. Schemele de comanda pentru actionarea capului de lucru C1 (plasarea capsulei pe dechiderea sticlei) si pentru cilindrul C2 (fixarea capsulei pe gura sticlei).
Variabilele primare sunt:
semnalele c, d si h (pentru cilindrul C1)
semnalele d, g si i (pentru cilindrul C2)
iar variabilele de iesire:
EC1 si EC2 (pentru cilindrul C1)
ED1 si ED2 (pentru cilindrul C2)
Proiectul va cuprinde urmatoarele puncte:
A. Diagrama de semnale "intrari-iesiri" pentru automatul secvential proiectat.
B. Determinarea matricei (tabelei) primitive a starilor.
C. Reducerea numarului de stari ale matricei primitive (contruirea matricei reduse a starilor).
D. Codificarea starilor matricei reduse.
E. Determinarea matricelor tranzitiilor starilor si obtinerea functiilor de excitatie ale automatului.
F. Determinarea matricelor iesirilor si a functiilor de iesire a schemei.
G. Implementarea functiilor obtinute.
H. Analiza schemei obtinute.
A. Diagrama de semnale "intrari-iesiri"
Diagrama de semnale cu semanalele ce influenteaza functionarea cilindrului CA.
t
a
b
E1
E2
s0 s1 s2 s3 s4 s5 s0
Diagrama de semnale cu semanalele ce influenteaza functionarea cilindrului C1.
h
c
f
EC1
EC2
s6 s7 s8 s9 s10 s11 s6
Diagrama de semnale cu semanalele ce influenteaza functionarea cilindrului C2.
i
d
g
ED1
ED2
s12 s13 s14 s15 s16 s17 s12
B. Determinarea matricei primitive a starilor
Vom denumi matrice primitiva a starilor automatului secvential asincron aceea tabela care reflecta pe coloane corespondenta dintre combinatiile variabilelor de intrare si cel putin o stare interna stabila a automatului, iar pe linii contine toate tranzitiile posibile dintr-o singura stare interna stabila.
Numarul de coloane al acestor doua matrici este cunoscut de la inceput, el fiind: M = 2m , unde m este numarul variabilelor de intrare in schema. Coloanele se modifica in cod ciclic, astfel incat de la o coloana la alta sa nu se modifice mai mult de o variabila de intrare.
Numarul de linii al matricei nu este cunoscut decat in momentul determinarii complete a matricii primitive a starilor, prin transpunerea tuturor conditiilor functionale ale automatului.
Fiecarei stari stabile, unice, dintr-o linie, ii sunt asociate automat combinatia valorilor marimilor de intrare care au determinat evolutia sistemului in acea stare, cat si valorile marimilor de iesire, care reprezinta efectul tranzitiei de stare.
In matricea primitiva a starilor trebuie neaparat completate toate locatiile, chiar daca unele dintre locatii nu sunt niciodata atinse prin ciclurile de functionare complete. Din acest punct de vedere, se disting doua situatii posibile:
a) stari indiferente: aceste locatii corespund unor situatii de functionare care nu pot fi niciodata atinse datorita specificului procesului.
b) stari interzise: acestea corespund unor situatii de functionare pe care protocolul de functionare al automatului le interzice, desi ele pot fi atinse.
Matricea primitiva pentru comanda cilindrului CA este:
|
sk |
tab |
E1 |
E2 |
||||||||
|
|
s1 |
s0 | |||||||||
|
|
s2 |
s1 |
s0 | ||||||||
|
|
s2 |
s1 |
s3 | ||||||||
|
|
s4 |
s3 | |||||||||
|
|
s4 |
s5 | |||||||||
|
|
s0/- |
s4 |
s5 | ||||||||
Starile desemneaza urmatoarele actiuni:
s0 - se astepta impulsul de semnalizare t
s1 - se initialiteaza cursa de lucru a cilindrului CA, se roteste platoul P
s2 - limitatorul a devine 0
s3 - se atinge limitatorul b (roata cu clichet a facut un pas), se comanda AR
s4 - limitatorul b devine 0
s5 - cilindrul CA a terminat cursa de revenire
Matricea primitiva pentru comanda cilindrului C1 este:
|
sk |
hcf |
EC1 |
EC2 |
||||||||
|
|
s7 |
s6 | |||||||||
|
|
s8 |
s7 |
s6 | ||||||||
|
|
s9 |
s8 |
s7 | ||||||||
|
|
s9 |
s10 | |||||||||
|
|
s11 |
s9 |
s10 | ||||||||
|
|
s11 |
s10 |
s6/- | ||||||||
Starile desemneaza urmatoarele actiuni:
s6 - se astepta ca o sticla sa soseasca pe postul de lucru
s7 - se comanda cursa de lucru a cilindrului C1, limitatotul h devine 0
s8 - limitatorul f a devenit 1, se comanda inversarea alimentarii cilindrului C1
s9 - cilindrul a pornit in cursa de revenire Þ limitatotul f devine 0
s10 - platoul a inceput pasul nou, c devine 0
s11 - cilindrul C1 e in cursa de revenire, cand se atinge limitatorul h, cilindrul a revenit in pozitia initiala
Matricea primitiva pentru comanda cilindrului C2 este:
|
sk |
idg |
ED1 |
ED2 |
||||||||
|
|
s13 |
s12 | |||||||||
|
|
s14 |
s13 |
s12 | ||||||||
|
|
s15 |
s14 |
s13 | ||||||||
|
|
s15 |
s14 | |||||||||
|
|
s17 |
s15 |
s16 | ||||||||
|
|
s17 |
s16 |
s12/- | ||||||||
Starile desemneaza urmatoarele actiuni:
s12 - se astepta ca o sticla sa soseasca pe postul de lucru
s13 - se comanda cursa de lucru a cilindrului C2, limitatotul i devine 0
s14 - limitatorul g a devenit 1, se comanda inversarea alimentarii cilindrului C2
s15 - cilindrul a pornit in cursa de revenire Þ limitatotul g devine 0
s16 - platoul a inceput pasul nou, d devine 0
s17 - cilindrul C2 e in cursa de revenire, cand se atinge limitatorul i, cilindrul a revenit in pozitia initiala
Pentru completarea matricii iesirilor trebuie analizate toate tranzitiile posibile dintre starile stabile. Se urmaresc doua aspecte de baza si anume:
a) In situatiile in care o tranzitie I j j nu duce la schimbarea valorii iesirii in fata de I, iesirea automatului trebuie mentinuta neschimbata si pe durata tranzitiei j. O proiectare corecta a automatului presupune neaparat respectarea acestei conditii.
b) In situatiile in care o tranzitie I j j duce la modificarea valorii iesirii y, pe durata tranzitiei iesirea este indiferenta (daca se atribuie tranzitiei j valoarea iesirii din I , modificarea iesirii are loc la sfarsitul tranzitiei, iar daca se atribuie tranzitiei j valoarea iesirii din j modificarea se produce chiar la incepultul tranzitiei). Astfel, continutul locatiilor corespunzatoare starilor instabile ale matricei complete a iesirilor reflecta in acest al doilea caz momentul bascularii iesirii. Cand nu prezinta importanta momentul bascularii iesirii ( la inceputul sau sfarsitul tranzitiei I ) se completeaza locatia respectiva cu semnul indiferent x.
Matricea completa a iesirilor pt. cilindrul CA:
|
sk |
tab | ||||||||
|
s0 | |||||||||
|
s1 | |||||||||
|
s2 | |||||||||
|
s3 | |||||||||
|
s4 | |||||||||
|
s5 | |||||||||
Matricea completa a iesirilor pt. cilindrul C1:
|
sk |
hcf | ||||||||
|
s6 | |||||||||
|
s7 |
| ||||||||
|
s8 | |||||||||
|
s9 | |||||||||
|
s10 | |||||||||
|
s11 | |||||||||
Matricea completa a iesirilor pt. cilindrul C2:
|
sk |
idg | ||||||||
|
s12 | |||||||||
|
s13 | |||||||||
|
s14 | |||||||||
|
s15 | |||||||||
|
s16 | |||||||||
|
s17 | |||||||||
C. Matricea redusa a starilor
Technica reducerii numarului de stari ale matricei primitive se bazeaza exclusiv pe teoria echivalarii automatelor secventiale. Reducerea numarului de stari primare se obtine prin fuzionarea, sau alipirea unui numar de stari dupa anumite reguli.
Alipirea sau fuzionarea a doua linii ale matricei primitive a starilor, devine posibila daca respecta urmatoarea definitie: doua linii ale matricei primitive a starilor (corespunzatoare starilor unice i, respectiv j) se pot alipi, si in felul acesta se obtine o forma redusa, daca tranzitiile din starile stabile i, j, ale celor doua linii conduc, pentru aplicarea acelorasi valori ale variabilelor de intrare, intr-o stare viitoare k unica.
Alipirea starilor se poate face tinand cont si de un criteriu suplimentar, si anume acela al concordantei iesirilor. In felul acesta, minimizarea automatului secvential se extinde si asupra sectiunii logice de generare a iesirilor. In felul acesta, minimizarea automatului secvential se extinde si asupra sectiunii logice de generare a iesirilor.
Rezulta ca pentru a alipi, conform definitiei date mai sus, doua linii ale matricii primitive, caracterizate de starile unice stabile i si j trebuie ca in fiecare coloana a matricii, continutul locatiilor sa corespunda uneia din combinatiile urmatoare:
![]()
i j i j
![]() i j i j
i j i j
Pentru comanda cilindrului CA am facut gruparea:
|
|
tab | ||||||||
|
|
s1 |
s0 | |||||||
|
|
s1 |
s1 |
s0 |
s4 |
s1 |
||||
|
|
s0 |
s4 |
s4 |
||||||
|
sk |
tab | ||||||||
|
A(0) | |||||||||
|
B(1,2,3) | |||||||||
|
C(4,5) | |||||||||
Pentru comanda cilindrului C1 am facut gruparea:
|
F E |
hcf
D![]()
![]()
![]()
D(6)
s7
s6
![]()
![]()
![]()
![]()
![]() E(7,8)
E(7,8)
s9
s7
s7
s6
![]()
![]()
 F(9,10,11)
F(9,10,11)
s9
s9
s9
s6
![]()
![]()
|
|
tab | ||||||||
|
D(6) | |||||||||
|
E(7,8) | |||||||||
|
F(9,10,11) | |||||||||
Pentru comanda cilindrului C2 am facut gruparea:
|
I H |
hcf
G![]()
![]()
![]()
G(12)
s13
s12
![]()
![]()
![]()
![]()
![]() H(13,14)
H(13,14)
s15
s13
s13
s12
![]()
![]() I(15,16,17)
I(15,16,17)
s15
s15
s15
s12
![]()
![]()
|
|
tab | ||||||||
|
G(12) | |||||||||
|
H(13,14) | |||||||||
|
I(15,16,17) | |||||||||
D. Codificarea starilor matricii reduse
Aceasta etapa creaza premizele obtinerii functiilor de excitatie Yi , i=1,2,.,p ale schemei secventiale. Ea se refera la codificarea univoca a starilor fuzionate ale automatului redus echivalent, descris de matricea redusa a starilor si iesirilor. Pentru un numar de q stari reduse, sunt necesare p variabile de stare , conform relatiei:
2p >= q
Pentru acest caz, pentru 2 stari fuzionate, numarul variabilelor de stare necesare este 1, pentru ca 21 = 2.
O importanta conditie este conditia legata de hazardul care poate apare datorita modificarii simultane a mai mult de o singura variabila secundara in decursul unei tranzitii. Acest tip de hazard se numeste hazard de tranzitie. Din aceasta cauza rezulta necesitatea interzicerii tranzitiilor de stare in care se modifica 2,3, . variabile de stare simultan. Codificarea se face astfel incat tranzitiile sa aiba loc numai intre stari adiacente.
Nu intotdeauna acest lucru este posibil; de aceea, pentru codificarea corecta a starilor fuzionate se impune, in aceasta etapa a sintezei, construirea poligonului tranzitiilor. Nodurile acestui poligon reprezinta starile stabile fuzionate iar laturile (orientate ca sens) reprezinta tranzitii intre starile alipite. O tranzitie poate fi marcata intre doua stari alipite i si j , daca in cel putin una din coloanele matrici reduse a starilor apare situatia
![]()
![]() K
, sau K .
K
, sau K .
K K
Codificarea variabilelor de stare pentru cilindrul CA:
|
sk |
cod |
y1 |
y2 |
y1 y2 |
tab |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
E1 |
E2 |
|
|
A |
0 |
0 |
00 |
- |
- |
- |
s1 |
s0 |
- |
- |
- |
0 |
0 |
|||
|
|
0 |
1 |
01 |
s1 |
- |
- |
s1 |
s0 |
- |
s4 |
s1 |
1 |
0 |
|||
|
C |
1 |
1 |
11 |
- |
- |
- |
- |
s0 |
- |
s4 |
s4 |
0 |
1 |
|||
Codificarea variabilelor de stare pentru cilindrul C1:
|
sk |
cod |
y3 |
y4 |
y3 y4 |
tab |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
EC1 |
EC2 |
|
|
|
0 |
0 |
00 |
- |
- |
- |
- |
s7 |
- |
- |
s6 |
0 |
0 |
|||
|
|
0 |
1 |
01 |
- |
- |
s9 |
s7 |
s7 |
- |
- |
s6 |
1 |
0 |
|||
|
|
1 |
1 |
11 |
s9 |
- |
s9 |
s9 |
- |
- |
- |
s6 |
0 |
1 |
|||
Codificarea variabilelor de stare pentru cilindrul C2:
|
sk |
cod |
y5 |
y6 |
y5 y6 |
tab |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
ED1 |
ED2 |
|
|
|
0 |
0 |
00 |
- |
- |
- |
- |
s13 |
- |
- |
s12 |
0 |
0 |
|||
|
|
0 |
1 |
01 |
- |
- |
s15 |
s13 |
s13 |
- |
- |
s12 |
1 |
0 |
|||
|
|
1 |
1 |
11 |
s15 |
- |
s15 |
s15 |
- |
- |
- |
s12 |
0 |
1 |
|||
E. Matricea tranzitiilor starilor si functiile de excitatie
Matricile tranzitiilor starilor reduse se obtin direct din matricea redusa a starilor, si permit obtinerea excitatiilor sectiunii de memorie a automatului. Matricea redusa a starilor genereaza un numar de matrici de tranzitie egal cu numarul variabilelor interne, de stare.
Continutul locatiilor matricilor de tranzitie evidentiaza natura starii: pentru o stare stabila, continutul locatiei (Y) este identic cu valoarea variabilei de stare y cu care a fost codificata starea fuzionata din care face parte respectiva stare stabila; pentru o stare instabila, continutul locatiei este identic cu valoarea variabilei de stare care a codificat starea stabila corespunzatoare starii instabile considerate.
Pentru comanda cilindrului CA:
|
y1 y2 |
tab |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
|
|
- |
- |
- |
s1 |
s0 |
- |
- |
- |
|
|
|
s1 |
- |
- |
s1 |
s0 |
- |
s4 |
s1 |
|
|
|
- |
- |
- |
- |
s0 |
- |
s4 |
s4 |
|
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|
|
y1 y2 |
tab |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
||
|
00 |
- |
- |
- |
01 |
00 |
- |
- |
- |
|||
|
Y1/Y2 |
01 |
- |
- |
01 |
00 |
- |
11 |
01 |
|||
|
11 |
- |
- |
- |
- |
00 |
- |
11 |
11 |
|||
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|||
|
y1 y2 |
tab |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
||
|
|
- |
- |
- |
0 |
0 |
- |
- |
- |
|||
|
|
0 |
- |
- |
0 |
0 |
- |
1 |
0 |
|||
|
|
- |
- |
- |
- |
0 |
- |
1 |
1 |
|||
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|||
|
y1 y2 |
tab |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
||
|
|
- |
- |
- |
1 |
0 |
- |
- |
- |
|||
|
|
1 |
- |
- |
1 |
0 |
- |
1 |
1 |
|||
|
11 |
- |
- |
- |
- |
0 |
- |
1 |
1 |
|||
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|||
Pentru comanda cilindrului C1:
|
y3 y4 |
hcf |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
|
00 |
- |
- |
- |
- |
s7 |
- |
- |
s6 |
|
|
|
- |
- |
s9 |
s7 |
s7 |
- |
- |
s6 |
|
|
|
s9 |
- |
s9 |
s9 |
- |
- |
- |
s6 |
|
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|
|
y3 y4 |
hcf |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
||
|
00 |
- |
- |
- |
- |
01 |
- |
- |
00 |
|||
|
Y3/Y4 |
- |
- |
11 |
01 |
01 |
- |
- |
00 |
|||
|
11 |
11 |
- |
11 |
11 |
- |
- |
- |
00 |
|||
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|||
|
y3 y4 |
hcf |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
||
|
|
- |
- |
- |
- |
0 |
- |
- |
0 |
|||
|
|
- |
- |
1 |
0 |
0 |
- |
- |
0 |
|||
|
|
1 |
- |
1 |
1 |
- |
- |
- |
0 |
|||
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|||
|
y3 y4 |
hcf |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
||
|
|
- |
- |
- |
- |
1 |
- |
- |
0 |
|||
|
|
- |
- |
1 |
1 |
1 |
- |
- |
0 |
|||
|
11 |
1 |
- |
1 |
1 |
- |
- |
- |
0 |
|||
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|||
Pentru comanda cilindrului C2:
|
y5 y6 |
idg |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
|
00 |
- |
- |
- |
- |
s13 |
- |
- |
s12 |
|
|
|
- |
- |
s15 |
s13 |
s13 |
- |
- |
s12 |
|
|
|
s15 |
- |
s15 |
s15 |
- |
- |
- |
s12 |
|
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|
|
y5 y6 |
idg |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
||
|
00 |
- |
- |
- |
- |
01 |
- |
- |
00 |
|||
|
Y5/Y6 |
- |
- |
11 |
01 |
01 |
- |
- |
00 |
|||
|
11 |
11 |
- |
11 |
11 |
- |
- |
- |
00 |
|||
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|||
|
y5 y6 |
idg |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
||
|
|
- |
- |
- |
- |
0 |
- |
- |
0 |
|||
|
|
- |
- |
1 |
0 |
0 |
- |
- |
0 |
|||
|
|
1 |
- |
1 |
1 |
- |
- |
- |
0 |
|||
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|||
|
y5 y6 |
idg |
000 |
001 |
011 |
010 |
110 |
111 |
101 |
100 |
||
|
|
- |
- |
- |
- |
1 |
- |
- |
0 |
|||
|
|
- |
- |
1 |
1 |
1 |
- |
- |
0 |
|||
|
11 |
1 |
- |
1 |
1 |
- |
- |
- |
0 |
|||
|
10 |
- |
- |
- |
- |
- |
- |
- |
- |
|||
F. Matricea iesirilor si functiile de iesire ale schemei
Pentru comanda cilindrului CA:
|
|
tab | ||||||||||
|
| |||||||||||
|
| |||||||||||
|
y1 y2 |
tab | ||||||||||
|
| |||||||||||
|
| |||||||||||
Pentru comanda cilindrului C1:
|
y3 y4 |
hcf | ||||||||||
|
| |||||||||||
|
| |||||||||||
|
y3 y4 |
hcf | ||||||||||
|
| |||||||||||
|
| |||||||||||
Pentru comanda cilindrului C2:
|
y5 y6 |
idg | ||||||||||
|
| |||||||||||
|
| |||||||||||
|
y5 y6 |
idg | ||||||||||
|
| |||||||||||
|
| |||||||||||
G. Implementarea functiilor obtinute
1x7404 (-2) 2x7400 (-2)
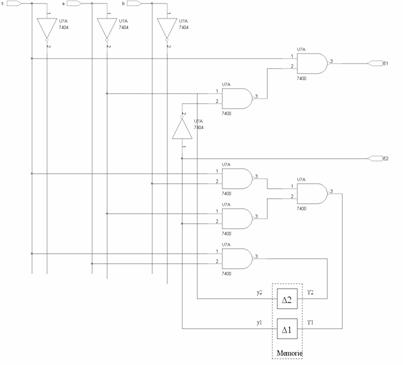
Implementarea comenzii cilindrului CA:
1x7404 (-2) 2x7408 (-3) 1x7400 (-)
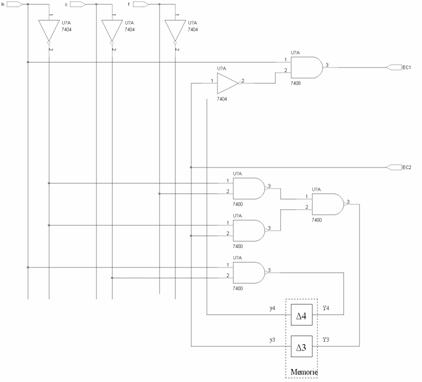
Implementarea comenzii cilindrului C1:
Implementarea comenzii cilindrului C2:
1x7404 (-2) 2x7408 (-3) 1x7400 (-)
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 882
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved