| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
MANIPULATOARE CU DEPLASARE PE SINE
In categoria acestora intra toate manipulatoarele ce se deplaseaza limitat pe o cale de rulare (una sau doua sine profilate). Aceasta categorie se confunda cu primele cinci tipuri de manipulatoare, clasificate dupa cel de-al treilea criteriu. Manipulatoarele cu deplasare pe sine pot fi si ele specializate in functie de utilajul pe care-l deservesc (ciocan sau presa). In figura urmatoare se prezinta un manipulator de forjare de 2 000 daN (tipul 1 ce deserveste un ciocan de forja. El are in componenta patru mecanisme : pentru deplasare rectilinie pe sine ; pentru rotirea bratului; pentru balansarea acestuia ; pentru actionarea clestelui.
Cele patru mecanisme ale manipulatorului sunt amplasate pe doua platforme etajate : mecanismul de oscilare a bratului pe platforma superioara ; mecanismele de deplasare, rotire a bratului si actionare a clestelui pe platforma inferioara.
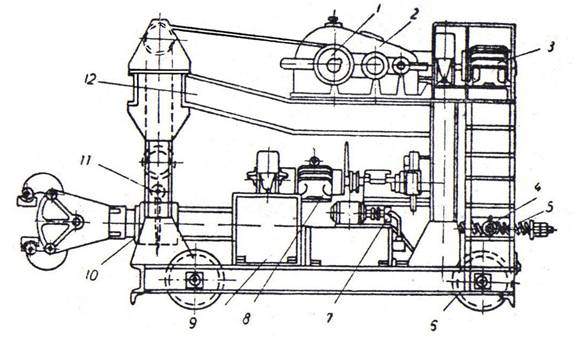
Manipulator de forja de tip 1:
1 - tambur de cablu; 2 - redactor; 3 - motor electric; 4 - centru de deplasare al bratului;
5 - amortizor; 6 - roti de rulare; 7 - pompa de ulei; 8 - mecanism de rotire a bratului;
9 - redresoare; 10 - brat; 11 - suspensie cu palan; 12 - constructie metalica.
Oscilarea bratului se face prin intermediul unui palan fixat pe brat in partea din fata printr-un sistem de amortizare a trepidatiilor. Pe platforma inferioara mai sunt amplasate pompa de ulei pentru mecanismul de actionare a clestelui, redresoarele pentru motoarele electrice, centrul de oscilare a bratului cu sistemul sau de amortizare si cabina de comanda.
Robustetea constructiva, suprafata mica ocupata si sistemul dublu de amortizare a trepidatiilor (in plan vertical si in plan orizontal) face ca acest tip de manipulatoare sa fie foarte des folosit in instalatiile de forja cu productie de piese de dimensiuni relativ reduse. Deplasarea lor rectilinie, alternativa spre ciocan si inapoi constituie insa un dezavantaj hotaritor in alegerea lor ca utilaje de deservire a instalatiilor cu puncte de strangulare, pe fluxul tehnologic.
Tot din categoria manipulatoarelor cu deplasare pe sine face parte si manipulatorul de 5 000 daN, prezentat in figura urmatoare (tipul 4
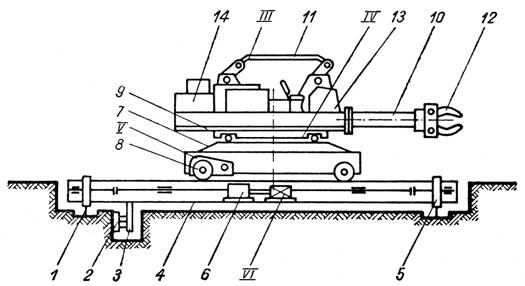
Manipulator de tip 4:
- cale de rulare; 2 - linii de curent; 3 - culegator de curent; 4 - pod; 5 - role de rulare pod; 6 - mecanism de deplasare a podului (VI); 7 - carucior; 8 - mecanism de deplasare a caruciorului (V); 9 - platforma rotitoare; - brat; - paralelogram; cleste;
- cabina de comanda; 14 - contragreutate.
La acest tip mai apar inca doua mecanisme : de rotire a platformei si de deplasare transversala a caruciorului (amplasate pe platforma inferioara a caruciorului).
Utilizarea acestui tip de manipulator in instalatiile de forja face posibila deplasarea pe doua directii perpendiculare si rotirea in jurul axei verticale a platformei.
In acest context manipulatorul cuprinde mecanismele de actionare a clestelui I, mecanismul de rotire a bratului II, mecanismul de ridicare - coborare III, mecanismul de rotire a platformei IV si cele doua mecanisme de deplasare, a caruciorului V si a podului VI.
I.Mecanismul de actionare a clestelui.
Functionarea acestui mecanism rezulta din figura urmatoare. Cele doua piese de strangere (in plan orizontal) creeaza prin apasare doua forte de aderenta N cu moment opus momentului fortei de greutate a semifabricatului Gs.
2μNa= Gs(a+b)
in care:
μ este coeficientul de frecare la contactul piesa - semifabricat;
a, b - distante, mm.
Prin actiunea cilindrului hidraulic se naste forta de tragere Ft, care genereaza momente fata de articulatiile bratelor:
Ft * d=2N(a+c).
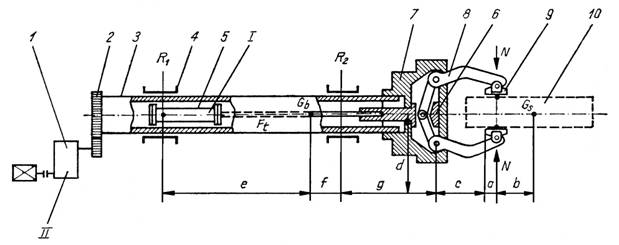
Mecanismele bratului manipulatorului:
mecanism de rotire a bratului (II); 2 - coroana dintata; 3 - carcasa bratului; 4 - lagare; 5 - cilindru hidraulic de actionare a clestelui (J); 6 - piesa profilata; 7 - scut;
falcile clestelui; 9 - bac de strangere; 10 - semifabricat.
II. Mecanismul de rotire al bratului
Bratul manipulatorului se sprijina in lagarele 4, in care iau nastere reactiunile R1 si R2, calculate prin ecuatiile de momente:
R1(e+f) = Gs(g+c+a+b) - Gb * f
R2(e+f) = Gs * (e+f+g+c+a+b) + Gb * e ,
in care:
Gb este greutatea bratului, in N.
In aceste ecuatii s-a considerat o incarcare preponderenta in consola bratului, ceea ce corespunde situatiilor practice. Reactiunile R1 si R2 au din acest motiv sensuri contrare. Dupa determinarea lor se calculeaza momentul rezistent din lagare:
Mrez. = (R1 + R2) * μ1 * r1 (Nm)
In care:
μ1 este coeficientul de frecare in lagar,
r1 este raza lagarului, m.
Puterea motorului este:
P = Mrez. * nb / 9550 * η (kW)
in care nb este turatia motorului in rot/.min.
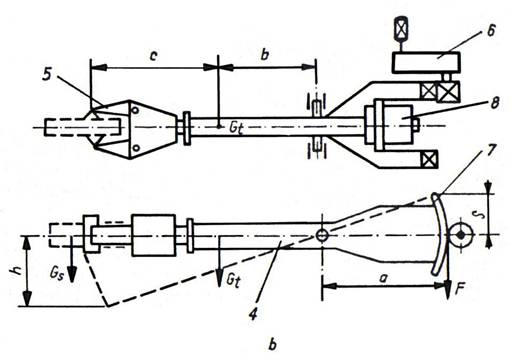
III. Mecanismul de ridicare - coborare a bratului
Acest mecanism, prezentat in figura este cu actionare hidraulica si transmisie prin paralelogram, asigurand o miscare plan paralela verticala a bratului. Forta cilindrului hidraulic realizeaza fata de articulatia 5 un moment activ, care contracareaza momentul rezistent al fortei de greutate (semifabricat - brat), distribuita in parghiile 3. Cilindrul se dimensioneaza pentru situatia cea mai defavorabila, cand bratul fortei lui de impingere fata de articulatia 5 este maxim, ceea ce corespunde pozitiei inferioare a bratului.
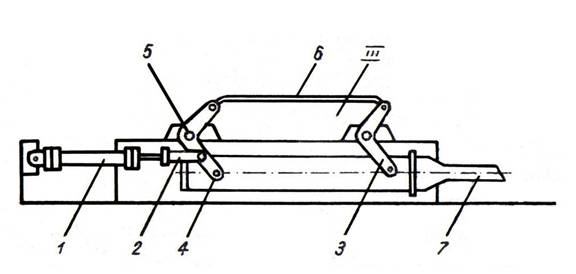
Mecanismul de ridicare-coborare a bratului (///):
- cilindru hidraulic; 2 - tipa; 3 - parghie cotita; 4 - articulatie
fixata la brat; 5 - articulatie fixa; 6 - bara paralelogram.
La alte tipuri constructive de manipulatoare se utilizeaza mecanisme de oscilare a bratului. Mecanismul de oscilare cu cablu este prezentat in figura a. Bratul manipulatorului este articulat in punctul 0, iar la capatul opus se afla montat un scripete activ. Prin infasurarea si desfasurarea cablului scripetele se ridica sau se coboara, clestele cu semifrabricatul ridicandu-se pe distanta ho.
Forta periferica la tamburul Fo se calculeaza cu relatia:
F0 = (Gs + Ga / ip ) * ηsm * a / b
In care:
Gs este greutatea sarcinii,
Ga este greutatea ansamblului ce se oscileaza, in N,
ip este raportul de transmitere al palanului,
ηs este randamentul scripetelui,
m este numarul de scripeti,
a, b sunt distante, in metrii.
viteza periferica a tamburului se calculeaza cu relatia:
v = v0 * ip
unde:
v0 este viteza de oscilare,in m / s,
h0 inaltimea de oscilare, in metrii.
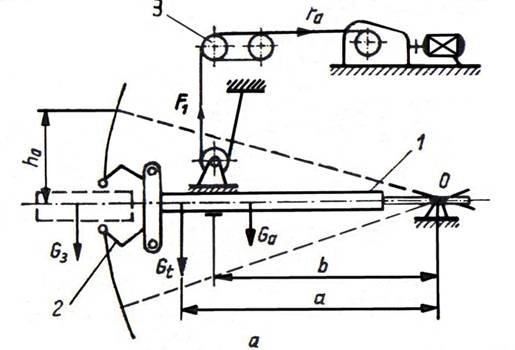
Mecanisme de oscilare a bratului cu cabluri (a) si cu sector dintat (b):
1 - brat; 2 - cleste; 3 - mecanism de actionare; 4 - brat; 5 - cleste; 6 - reductor; 7 - sector dintat; 8 - mecanism de actionare a clestelui.
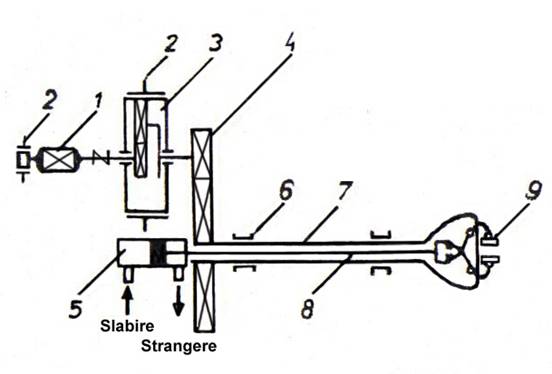
Schema cinematica a mecanismului de rotire a bratului si de actionare a clestelui
1 - motor electric; 2 - frana; 3 - diferendial planetar; 4 - pinion; 5 - motor hidraulic liniar; 6 - lagar; 7 - brat; 8 - tija de stangere; 9 - cleste.
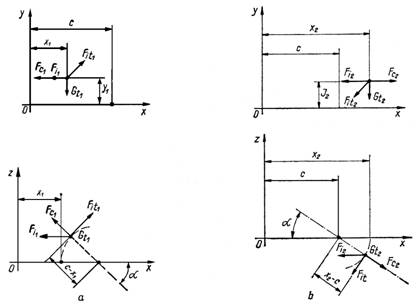
Diagrama fortelor la platforma rotitoare in capul fara sarcina in cleste (a) si cu sarcina in cleste (b).
In figura urmatoare este prezentat un manipulator de 2 000 daN care se deplaseaza pe o sina circulara cu un diametru de 7930 mm. Acesta este un manipulator de tipul 5 si are o constructie speciala compusa din doua grinzi de capat legate intre ele printr-o traversa.
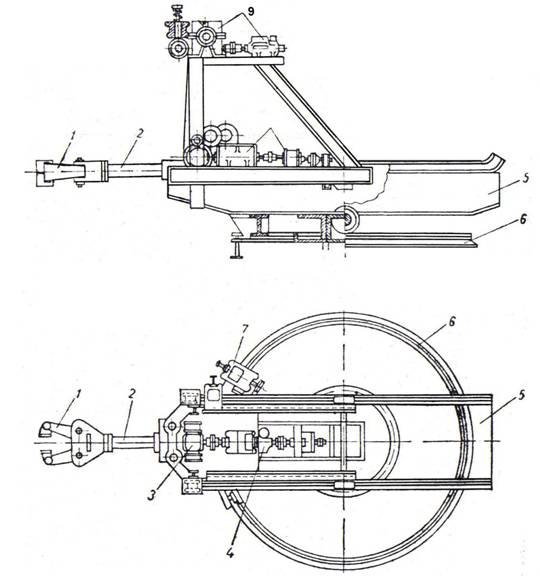
Manipulator de forja de tip 5:
1 - cleste; 2 - brat; 3 - mecanism de balansare; 4 - mecanism de rotire a bratului;
5 - constructie metalica; 6 - sina circulara.
Pe cele doua grinzi sunt fixate sinele caii de rulare a caruciorului, iar pe platformele acestuia, mecanismele de oscilare, rotire a bratului, actionare a clestelui si deplasare transversala. Mecanismul de rotire a manipulatorului se afla amplasat pe una din rotile din fata.
Acest tip de manipulatoare deservesc in general instalatiile de forjare amplasate pe un spatiu restrans si care sunt dotate cu prese de viteza mare.
Manipulatoarele de forja cu deplasare pe sine sunt utilizate in cele mai diverse conditii de lucru. Ele sunt recomandate atat de varietatea tipo-dimensio-nala si functionala cat si de caracteristicile tehnice :
a) viteza :
- de deplasare 40.. .60 m/min ;
- de rotire a bratului 4.. .20 rot/min ;
- de pendulare a bratului 3.. .5 m/min ;
b) cursa de deschidere a clestelui 220.. .500 mm ;
c) presiunea fluidului de lucru :
- aer 6 8*I04 daN/m2 ;
- ulei 1525*I04 daN/m2;
d) puterea :
- mecanismului de rotire a bratului 3,524,5 kW ;
- pompei 2 18,5 kW ;
- mecanismului de deplasare 5 30 kW ;
e) capacitatea de ridicare pina la 125 * I03 daN.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1927
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved