| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
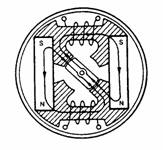
Aceste masini, numite generic si DSPM machines( DSPM machines= double salient permanent magnet machines) cu simbolul pentru motor DSPMM, au poli aparenti atat pe stator cat si pe rotor ca si in cazul SRM, dar sunt prevazute cu o excitatie cu magneti permanenti, plasati in diferite moduri. Prima masina de acest tip a fost realizata in deceniul al saselea al secolului trecut de Rauch si Jonson si s-a numit masina cu flux comutat[ R1]. O sectiune prin aceasta masina este data in Fig. 22. Principiul de functionare al masinii monofazate cu doi magneti de tip Alnico si doua bobine ce pot fi conectate in serie sau in paralel, este evident.
|
Fig 22 Sectiune prin generatorul cu flux comutat. |
Cand rotorul se roteste din pozitia prezentata in Fig. 22 la un moment dat fluxul prin bobine este nul, iar cand acesta ajunge intr-o pozitie similara, dar in dreptul celorlalti doi poli statorici fluxul are valoare maxima, de sens opus, prin cele doua bobine. Astfel tensiunea electromotoare indusa in bobine variaza sinusoidal, existand o polarizare bidirectionala a fluxului.
Astazi exista o tendinta puternica de a construi masini la care circulatia conventionala in doua dimensiuni( 2D)a fluxului, ca in Fig. 22, sa fie transformata datorita structurii masinii, intr-o circulatie in trei dimensiuni( 3D) evidentiindu-se si asa numita componenta transversala a fluxului. In ce priveste dezvoltarea acestei clase de masini, trebuie subliniat aportul profesorului Lipo si a echipei sale de cercetare, ei propunand foarte multe variante de astfel de masini.
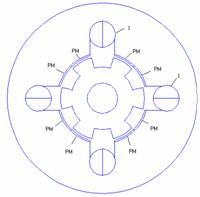
Din masina dezvoltata de Rauch si Jones s-a dezvoltat o masina cu magnetii plasati pe suprafata polilor statorici numita masina cu flux reversabil( FRM= flux reversal machine). In Fig. 23 este data structura principala a unei astfel de masina monofazata cu 4/6 poli[v.].
|
Fig 23 Structura unui FRM monofazata cu 4/6 poli. |
Pe suprafata fiecarui pol statoric sunt dispusi cate doi magneti permanenti de polaritati opuse. Fluxul printr-o bobina statorica este zero atunci cand axa unui pol rotoric coincide cu axa polului statoric in jurul caruia este plasata bobina.
Fluxul prin bobina schimba de semn
la deplasarea rotorului cu un unghi egal cu jumatatea pasului polar rotoric, ![]() unde QR
este numarul de poli rotorici. Latimea polului statoric este dubla fata de latimea
polului rotoric i timp ce deschiderile de crestatura de pe stator si de pe
rotor sunt egale.
unde QR
este numarul de poli rotorici. Latimea polului statoric este dubla fata de latimea
polului rotoric i timp ce deschiderile de crestatura de pe stator si de pe
rotor sunt egale.
Relatia dintre numerele de poli statoric QS si rotoric QR si numarul de faze m este:
![]() (3)
(3)
unde m=2 pentru masina monofazata. Deci in afara de numarul de poli din exemplul considerat, 4/6 masini monofazate se pot realiza cu 2/3 poli cu 8/12 poli si asa mai departe. Pentru masinile trifazate numarul de poli poate fi 6/8, 12/16, etc.
Inductanta fazei este mica si in consecinta cuplul electromagnetic de tip reluctant este si el mic, dar sunt mari cuplurile de tip de blocare( agatare) datorate prezentei magnetilor permanenti. Pentru reducerea acestora se realizeaza polii rotorici inclinati fata de generatoare, ca in cazul crestaturilor rotorice la masinile de inductie cu rotor in colivie. Prin inclinare insa se reduce si cuplul electromagnetic. FRM poate fi utilizat ca generator la puteri relativ mici. In Fig. 24 este prezentata tensiunea electromotoare indusa in bobina 1 a masinii date in 23, pozitia initiala a rotorului fiind cea din figura. Tensiunea electromotoare indusa s-a calculat cu metoda elementului finit ( MEF ) pentru o viteza a rotorului de 1200 rot/ min.
|
Fig 24Tensiunea electromotoare indusa in bobina 1 a FRM din Fig. 23 functie de pozitia rotorului, viteza rotorului n=1200 rot/ min., 120 spire pe bobina. |
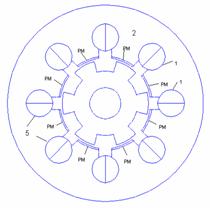
O alta varianta de masina cu magnetii permanenti plasati in stator este prezentata in Fig. 25. Aceasta masina are 8/6 poli si provine dintr-un SRM la care s-au adaugat doi magneti permanenti in stator avand ambii aceeasi polaritate, adica, spre exemplu nord pe fata superioara. Si in acest caz exista, ca si la FRM, forte radiale si cupluri de blocare importante. In absenta curentilor din bobine rotorul se pozitioneaza intr-o pozitie de echilibru, pozitia din Fig. 25.Modul de alimentare al fazelor este diferit de cel intalnit la SRM. In acest caz trebuie alimentate toate cele trei faze pentru a obtine un cuplu cat mai mare. Daca se doreste rotirea invers acelor ceasornicului a rotorului din pozitia data in Fig. 25 bobina 1 este alimentata astfel ca sa intareasca campul magnetului permanent. La fel si bobina urmatoare in sensul de rotatie, in timp ce cea de-a treia bobina este alimentata invers pentru stabilirea campului dat de magnetul permanent. Bobinele simetrice sunt alimentate corespunzator pentru a se suma solenatiile. Sectiunea magnetului permanent este prea mica si pentru a asigura o concentrare de flux in poli ar trebui marita sectiunea deformand circuitul magnetic pe zona diametrului orizontal.
|
Fig 25 Structura principala a unei masini DSPM cu magnetii permanenti inserati in jugul statoric. |
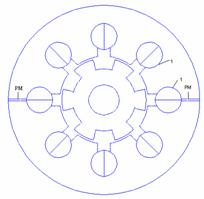
O structura similara de masina, acelasi numar de poli si aceleasi dimensiuni in fapt, dar cu magnetii permanenti dispusi pe suprafata polilor statorici este prezentata in Fig. 26.
|
Fig 26 Structura principala a unei masini DSPM cu magnetii permanenti plasati pe polii statorici in intrefier. |
Toti magnetii permanenti de pe o jumatate a masinii, in cazul nostru jumatatea superioara diametrului orizontal din Fig. 26 au aceeasi polaritate, ceilalti magneti permanenti, diametrali opusi primilor, avand polaritate inversa. Si in cazul acestei masini, ca si la masina cu magnetii permanenti ingropati in jugul statoric, strategia de alimentare a fazelor este diferita fata de SRM, chiar daca ambele masini provin din SRM. Si aici cuplurile de blocare si fortele radiale sunt destul de importante. La toate cele trei masini prezentate fluxul dat de fazele alimentate trece prin magnetii permanenti de buna calitate cu caracteristica de revenire liniara, precum si dimensionarea adecvata a acestora.
Motorul pas cu pas (MPP) este un convertor electromecanic, care realizeaza conversia impulsurilor de comanda intr-o miscare de rotatie ce consta din deplasari unghiulare discrete, de marime egala cu pasul qp al motorului.
MPP este utilizat in aplicatii unde se doreste realizarea unei miscari incrementale folosind sistemele de comanda numerice. Principalele aplicatii sunt in domeniile: masini unelte cu comanda numerica, echipamente periferice de calcul, tehnica cinematografica si de televiziune, roboti industriali, dozatoare si cantare automate, ceasuri electronice.
Avantajele MPP:
asigura univocitatea conversiei impuls-deplasare, ceea ce permite folosirea MPP in circuit deschis de pozitionare (fara traductori de pozitie);
precizie si putere de rezolutie, ceea ce simplifica lantul cinematic de actionare:
procese tranzitorii fara pierderi de pasi;
compatibilitate cu tehnica numerica;
memoreaza pozitia la tipurile care dezvolta cuplu si in repaus.
Dezavantajele principale sunt:
schema de alimentare si comanda trebuie adaptata la tipul MPP;
randament scazut;
viteza de rotatie relativ scazuta.
Constructia MPP.
Aceste se pot clasifica in functie de tipul constructiv, numarul infasurarilor de comanda, sistemul de alimentare si modul de comanda.
In general un MPP are un circuit magnetic nesimetric al carui reluctanta variaza in functie de pozitia relativa dintre cele doua armaturi, stator si rotor. Infasurarea MPP este plasata numai pe stator sub forma unor infasurari deschise m fazate.
Dupa tipul constructiv MPP pot fi:
cu reluctanta variabila;
cu magneti permanenti.
Dupa numarul infasurarilor de comanda se disting MPP cu: una, doua, trei, patru si eventual cinci faze. Aceste infasurari se dispun pe dintii mari (poli) ai statorului. MPP care au mai putin de trei faze (m < 3) se construiesc cu dinti rotorici (sau statorici) nesimetrici si se pot roti numai intr-o directie.
MPP cu reluctanta variabila.
Sunt de doua tipuri: monostatorice (cu o singura unitate stator-rotor) si polistatorice (cu mai multe unitati stator-rotor). Ambele tipuri pot fi: cu intrefier axial sau radial; cu miscare de rotatie sau liniara. MPP cu reluctanta variabila se pot construi cu minimum m= 2 faze.
Utilizarea MPP cu reluctanta variabila se caracterizeaza prin urmatoarele avantaje:
constructie mecanica simpla;
frecventa de comanda ridicata si viteza de rotatie relativ ridicata.
Principalele dezavantaje ale acestor tipuri de motoare sunt:
lipsa cuplului in absenta curentului de comanda;
efectuarea unghiului de pas cu oscilatii importante in special in cazul alimentarii in secventa simpla.
MPP cu reluctanta variabila si magnet permanent.
Aceasta varianta constructiva se3 mai numesc si MPP hibride. Aceste motoare se pot construi si cu o singura infasurare (monofazata). Prezenta magnetului permanent determina urmatoarele avantaje fata de tipul precedent:
motorul are cuplu si in repaus, deci pozitia rotorului este retinuta;
cuplul motorului este mai mare datorita componentei de cuplu dat de magnet;
pasul este executat fara prea mari oscilatii.
MPP hibride pot fi construite cu magnetul pe stator sau pe rotor. Campul creat de acesta are caracterul unui camp homopolar. Folosirea lor pe stator permite inlocuirea unor infasurari de comanda.
Dezavantajele ale acestor motoare hibride:
performantele sunt influentate de schimbarile caracteristicilor magnetilor;
valoarea relativ ridicata a t.e.m. indusa in fazele statorice ale MPP;
cresterea inertiei din cauza magnetilor;
micsorarea frecventei de comanda.
Marimile caracteristice ale MPP.
Acestea sunt: unghi de pas, cuplul sincronizat static maxim, variatia cuplului cu pozitia rotorului si numarul de pasi pe o rotatie
Cuplul static sincronizat:
![]()
unde, Tsr este cuplul static rezistent, J momentul de inertie polar al maselor in miscare, Fn este coeficientul de frecari vascoase, pr, numarul de pasi pe o rotatie.
Numarul de pasi pe o rotatie pe o rotatie este determinat de unghiul de pas qp
![]()
Cuplul dinamic (T-Tr) serveste pentru accelerarea rotorului si invingerea frecarilor proprii. Viteza de rotatie a MPP este:
![]()
In variatia unghiului q la efectuarea pasului, in urma aplicarii tensiunii de comanda, se disting doua marimi: timpul de efectuare a unui pas tp, definit de la aplicarea comenzii si pana la atingerea prima data a noii pozitii de echilibru si unghiul dinamic de sarcina (denumit si unghi de suprareglare), d, care reprezinta devierea unghiulara maxima a pozitiei rotorului fata de punctul de echilibru stabil. Eroarea de pas Dqp reprezinta abaterea unghiulara sistematica maxima, necumulativa fata de valoarea unghiula
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2695
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved