| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
MASINI ELECTRICE SPECIALE
1. Masini electrice speciale de inductie
Fata de masinile evocate la capitolele anterioare cuplajul de inductie (MAS monofazat cu infasurare auxiliara, Motorul monofazat cu colector si Motorul trifazat cu colector) in sistemele de actionare electrica (SAE) sunt uzuale urmatoarele tipuri de ME speciale de inductie:
motorul liniar
masina asincrona bifazata
micromotorul cu poli ecranati.
1.1. Motorul asincron liniar (MAL)
In general, fiecarui tip de motor electric rotativ ii corespunde un omolog liniar.
MAL este mai raspandit in aplicatii decat celelalte tipuri (sincron, de c.c.).
Daca se taie statorul si rotorul unei masini de inductie dupa o generatoare si se desfasoara intr-un plan, se obtine masina de inductie liniara.
|
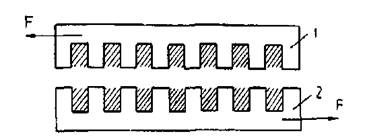
In figura 1.a s-a notat cu: 1 - inductorul 2 - indusul masinii liniare obtinute. |
In figura 1.b s-a notat cu: 1 - inductorul 2 - indusul masinii liniare obtinute. 3 - armatura indusa |
Principiul de functionare al MAL este similar cu al MAS avand rotorul in scurtcircuit, din a carui desfasurare se poate imagina ca provine (fig. 1) cu observatia ca nu mai este vorba de un camp magnetic invartitor, ci de unul alunecator. De asemenea, isi pierd semnificatia cuplul electromagnetic M si turatia n, locul lor fiind luat de forta longitudinala F si viteza v.
 a.
a.
 b.
b.
Fig. 1. Motorul asincron liniar
Spre deosebire de alte tipuri de masini electrice, forma indusului, precum si pozitia relativa fata de inductor, nu pot fi definite decat in contextul actionarii din care face parte.
Alunecarea s se defineste in forma:
 sau
v = v1
(1 - s)
sau
v = v1
(1 - s)
unde v1 este viteza de sincronism (de deplasare a campului magnetic alunecator fata de infasurarea inductoare), aceeasi, indiferent ca indusul este desfasurat sau nu. Dar la masina rotativa de inductie v1 = pDn1 si inlocuind pD = 2pt si n1=f/p se obtine:
v t f
t pasul polar
- f - frecventa tensiunii de alimentare.
Viteza relativa a celor doua armaturi desfasurate, este data de relatia:
![]()
Se observa ca spre deosebire de turatia n1 viteza v1 nu este o functie de numarul de poli, ci doar de frecventa si marimea pasului polar t Prin alegerea potrivita a acestor marimi, se obtin masini liniare cu viteze cuprinse intre cativa m/s si peste 100 m/s.
Daca o < v < v1 masina functioneaza in regim de motor, care prezinta interes, in primul rand in instalatiile in care este necesara obtinerea unei miscari de translatie.
Exista doua posibilitati de realizare a motoarelor liniare:
cu inductor scurt si indus lung
cu inductor lung si indus scurt.
Se urmareste in continuare motorul cu inductor scurt.
In fig. 1 se poate separa colivia de miezul feromagnetic ce ramane fix fata de inductor si care se poate considera ca facand parte din acesta, intrucat serveste pentru inchiderea campului magnetic. In acest caz, indusul se reduce la o colivie supusa actiunii fortei de propulsie F. Daca se presupune ca aceasta are un numar infinit de bare, indusul devine (fig. 2.a) o banda 2 conductoare neferomagnetica, de regula din cupru sau aluminiu. (Sunt tipuri constructive, in care jugul rotoric reprezentat in fig. 2.a prin linii intrerupte este eliminat si campul magnetic inductor se inchide prin aer). Daca jugul rotoric, ramas fix fata de inductor, se prevede cu crestaturi pe marginea dinspre intrefier si se introduce o infasurare inductoare similara, se obtine masina liniara cu inductor dublu (fig. 2.b).
In practica se realizeaza atat masini liniare cu inductor bilateral cat si unilateral.
In alegerea tipului de indus, se are in vedere atat aspectul economic cat si performantele ce trebuiesc obtinute. Din punct de vedere practic, in afara de indusul nemagnetic izotrop reprezentat printr-o placa conductoare, prezentat mai sus, intra in discutie indusul feromagnetic masiv si indusul sandwich, (fig. 2.c) intermediar intre primele doua tipuri, format prin suprapunerea unui strat conductor electric si unul feromagnetic (o varianta, mai costisitoare, este cea in care stratul conductor electric se inlocuieste prin o colivie inglobata in stratul feromagnetic, realizat din tole sau feromagnetic masiv).

a. b. c.
Fig. 2. Tipuri constructive de masini liniare de inductie.

a. Vedere de ansamblu b. Vedere din planul x0y
Fig. 3. Masina liniara de inductie
Fenomenele fizice din cadrul MAL fiind asemanatoare cu cele de la MAS rotativa, este firesc ca ecuatiile de functionare, schemele echivalente si diagramele de fazori sa fie analoage cu cele de la MAS.
Caracteristica mecanica a MAL reprezinta dependenta forta-viteza si are o expresie de forma:
k1, k2 - constante ale masinii.
Alura caracteristicii mecanice F = f(v) ce defineste comportarea motorului liniar, este strans legata de tipul de indus adoptat. Astfel, pentru rotor feromagnetic masiv, caracteristica mecanica este asemanatoare celei obtinute cu o masina de inductie in constructie normala cu rezistenta rotorica importanta, in timp ce solutia cu indus in colivie, determina o caracteristica mecanica ce se apropie ca forma de cea a unei masini de inductie cu rotorul in scurtcircuit.
Alura acestei caracteristici este evidentiata in figura 4. Celelalte caracteristici sunt similare cu ale MAS.
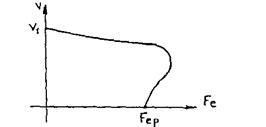
Fig. 4. Caracteristica mecanica a MAL
Avand in vedere forma constructiva aparte a masinii liniare de inductie, in comparatie cu masina rotativa de inductie, apar o serie de fenomene suplimentare. Fie masina liniara din fig. 3.a cu indusul 2 mai lung si mai lat decat inductorul 1.
Liniile de curent din indusul masiv 2, nu au un traseu impus ca in prezenta unei colivii ci obtin, la un moment dat, un spectru ca in figura 3.b unde s-au considerat pentru comparatie in acelasi desen, doua valori pentru pasul polar.
Daca se urmaresc liniile de curent (2), (2') se observa ca vectorul densitatii de curent J are doua componente:
in directia 0y, componente utile transversale ce determina forta longitudinala F;
in directia 0x componente longitudinale.
Componentele transversale dezvolta asa numitul efect de margine sau transversal.
Componentele longitudinale ale curentilor secundari, au un caracter parazit, intrucat:
determina o crestere a rezistentei echivalente a indusului;
afecteaza alura caracteristicii mecanice;
determina o crestere a pierderilor suplimentare;
determina modificarea prin crearea unui camp de reactie propriu, a repartitiei dupa directia transversala a campului magnetic din intrefier.
Avand in vedere latimea sporita a indusului, campul magnetic creat de partile frontale ale infasurarii inductorului poate determina in indus t.e.m. si curenti indusi, ce sa fie sursa altor pierderi suplimentare.
Din cele prezentate rezulta caracterul dezavantajos al acestui efect de margine.
Comparand liniile de curent (2) si (2') din figura 3.b, trasate pentru doi pasi polari diferiti, se observa ca:
- la motoarele de viteza mica (cu t mic), densitatea de curent este aproape transversala si prin urmare efectul transversal este mai slab.
- la masinile de viteza mare insa, unde pasul polar este comparabil cu latimea l, intervine o crestere importanta a rezistentei echivalente a indusului, ce afecteaza sensibil performantele masinii.
Rezulta de aici necesitatea alegerii cu grija a dimensiunilor l si t astfel incat sa se asigure atat viteza cat si forta longitudinala necesara. De asemenea, pentru realizarea unei solutii economice, nu este indicata marirea importanta a latimii indusului (dimensiunile c1, c2 din figura 3.b) ci doar in masura necesara inchiderii liniilor de curent.
Se au in vedere in continuare, dimensiunile finite ale inductorului dupa directia 0x. Se neglijeaza pentru simplificare, efectul transversal si se presupun in prima aproximatie curenti sinusoidali simetrici in infasurarile inductorului, considerate repartizate sinusoidal.
Spre deosebire de masina rotativa de inductie, in care se obtine in ipoteze simplificatoare un camp magnetic invartitor circular, amplitudinea undei campului magnetic alunecator ce se stabileste in masina liniara, este variabila pe lungimea inductorului si depinde intr-un punct dat si de marimea intrefierului, viteza si parametrii indusului. Pe masura indepartarii de margini, oscilatiile de amplitudine scad, incat in zona centrala a masinii (daca se iau si unele masuri de compensare prin alegerea potrivita a infasurarii inductoare), campul alunecator se poate considera aproximativ de amplitudine constanta.
Rezulta din cele prezentate, ca distributia densitatii de curent din indus, apare sensibil modificata fata de cea sinusoidala, in zonele de intrare si iesire ale indusului de sub inductor (in figura 3.b este reprezentat prin (1) spectrul liniilor de curent la un moment dat).
Corespunzator repartitiei obtinute pentru inductia magnetica in intrefier dupa directia 0x si densitatii de curent din indus in zonele de capat, in masina liniara se stabilesc pierderi suplimentare si forte, de tractiune sau de franare, suplimentare. Trebuie retinut in plus, ca urmare a formei deschise a circuitului magnetic, inductivitatile infasurarilor de faza nu sunt identice, incat sistemul curentilor inductorului este dezechilibrat. Existenta curentilor nesimetrici este la originea stabilirii unor noi forte si pierderi suplimentare.
Toate aceste aspecte specifice definesc asa numitul efect de capat sau longitudinal, care, se vede, are un caracter dezavantajos.
Limitarea acestui efect se realizeaza in primul rand prin cresterea numarului de poli ce este indicat sa fie mai mare fapt care duce la scumpirea si complicarea masinii.
La masina liniara apare in discutie pentru indusul de grosime relativ importanta, efectul de refulare. Potrivit acestuia, se modifica repartitia densitatii de curent din indus, in amplitudine si faza pe inaltimea 0x.
Se tine cont de fenomenul de refulare operand in calcule de obicei cu adancimea de patrundere, dependenta de frecventa proceselor din indus, dimensiunile acestuia, de rezistivitatea r si permeabilitatea magnetica m a materialului din indus.
Efectul transversal influenteaza direct adancimea de patrundere, pe de o parte prin modificarea repartitiei transversale a inductiei magnetice din intrefier, iar pe de alta parte prin cresterea rezistentei echivalente a indusului. De observat ca la masinile cu indus feromagnetic, pentru a reduce efectul de refulare, in vederea asigurarii unei rezistente echivalente a indusului suficient de mica, se urmareste ca acesta sa fie puternic saturat.
Observatii:
Daca se suprapun extremitatile inductorului pe directia 0y, se regaseste masina rotativa de inductie: dispare efectul longitudinal dar se pastreaza efectul transversal.
2. Daca se suprapun extremitatilor de pe directia 0x ale inductorului, se obtine masina liniara de inductie tubulara, la care dispare efectul transversal dar este prezent efectul longitudinal (masina tubulara de inductie este studiata in momentul de fata, intrucat prezinta interes in multe domenii ale practicii).
3. Prezenta ambelor efecte de capat la masina liniara, implica un studiu analitic complicat si din acest motiv ne-am limitat la o prezentare calitativa.
Sunt analizate in continuare fortele ce se dezvolta in masina liniara. Considerand doar campul magnetic din intrefier si admitand variatia sinusoidala in timp a marimilor, in sistemul de axe ales, se obtin:
forta longitudinala:
unde L - lungimea inductorului, D - grosimea intrefierului, ce determina antrenarea sau franarea indusului;
forta transversala:
determinata de prezenta componentelor longitudinale, Jx in densitatea de curent din indus.
De remarcat ca daca in figura 3.b, c1 = c2, liniile de curent sunt simetrice fata de axa 0x si forta Fy se anuleaza.
Fortele Fy, se fac resimtite in conditiile c1 c2, si uneori sunt folosite, la masinile liniare de mare viteza, la care componenta Jx devine importanta.
Forta normala Fz are doua componente, una de atractie dintre cele doua armaturi la inductorul bilateral sau intre inductorul unilateral si indusul feromagnetic si una de levitatie exercitata asupra indusului feromagnetic masiv sau nemagnetic, levitatorul fiind infasurarea inductoare. Observam ca la motorul liniar bilateral cu indus dispus simetric in intrefier, forta rezultanta de levitatie se anuleaza, componentele ei determinate de cele doua inductoare, fiind egale si de semn contrar. La o dispunere nesimetrica dupa directia 0z, aceste componente se dezechilibreaza determinand stabilirea unei rezultante, ce actioneaza in sensul restabilirii pozitiei simetrice si isi dovedesc utilitatea odata cu aceasta.
Studiul sistematic al campului electromagnetic din masina liniara, calculul fortelor Fx, Fy, Fz si a celorlalte marimi ce determina functionarea masinii, presupune rezolvarea ecuatiilor de camp in conditiile prezentei efectelor de capat si de refulare. Pentru stabilirea repartitiei campului electromagnetic in masina liniara si identificarea pe aceasta baza a principalilor parametri, se recurge la legile generale si de material ale teoriei macroscopice a fenomenelor electromagnetice, in forma locala. Considerand sistemul de referinta solidar cu statorul, avem:
![]()
![]()
![]()
![]()
divB = divE = 0 (3)
Introducand potentialul magnetic vector definit de relatia B = rotA, rezulta din relatia de mai sus:
![]() (4)
(4)
sau utilizand si relatiile (1), se obtine pentru potentialul magnetic vector ecuatia cu derivate partiale de ordinul doi:
![]() (5)
(5)
Rezolvarea ecuatiei (5) in cazul general, comporta insa dificultati serioase ca urmare a fenomenelor specifice prezentate. Considerarea lor separata simplifica rezolvarea problemei de camp si permite evidentierea unor aspecte interesante. Totusi, trebuie retinuta interdependenta fenomenelor si faptul ca suprapunerea efectelor nu se poate face in orice situatie fara a afecta precizia determinarilor. Lucrarile de cercetare actuale, urmaresc considerarea impreuna a fenomenelor specifice de baza, ceea ce conduce la rezolvarea ecuatiilor campului electromagnetic in conditii complicate de frontiera. In ipoteze simplificatoare insa, valabile de la caz la caz si utilizand atat metode analitice cat si numerice, se pot predetermina teoretic caracteristicile convenabile pentru masina liniara, care sa fie verificate de practica.
Motorul liniar are o serie de avantaje importante printre care cel legat de posibilitatea obtinerii directe a miscarii de translatie, a producerii unei puteri mecanice fara transmisii, il face util in tractiunea electrica.
Constructia motorului liniar este simpla si robusta ca a oricarei masini de inductie. Se preteaza pentru a fi utilizat pe vehicule cu perna de aer sau cu suspensie magnetica, cand pot fi folosite rational si fortele Fv si Fz; este silentios si nepoluant avantaje care il fac deosebit de actual.
Motoarele liniare se pot realiza de viteze dorite in mod simplu prin modificarea pasului polar sau a frecventei tensiunii de alimentare, fiind utilizate atat in tractiunea electrica de mare viteza cat si in instalatiile industriale unde sunt necesare viteze mici de deplasare.
Dezavantajele sunt legate de prezenta efectelor de capat ce se traduc prin forte parazite, pierderi suplimentare si curenti nesimetrici in infasurarile de faza, prin alunecari mai mari, un randament si un factor de putere inferiori motorului rotativ do inductie. Eforturile cercetarii actuale, concretizate in aparitia unui numar mare de tipuri de masini liniare, de viteze si puteri osciland in limite largi, ce isi gasesc utilizarea in instalatiile automate sau in tractiunea de mare viteza, sunt orientate in directia limitarii aspectelor dezavantajoase proprii acestor masini si asigurarii pe aceasta baza si a unor parametri tehnico-economici competitivi.
Cursul 2
1.2. Masina asincrona bifazata (MASB)
Servomecanismele de curent alternativ de mica putere au capatat o larga raspandire in ultimul timp. Ele prezinta avantajele urmatoare:
- servomotorul este in general mai simplu, mai robust si cu inertie mai mica decat cele de curent continuu;
- amplificatorul de curent alternativ ridica mult mai putine probleme din punctul de vedere al stabilitatii functionale.
In acelasi timp, nu trebuie uitate dezavantajele servomecanismelor de curent alternativ:
- sunt mai voluminoase;
- mai scumpe;
- necesita o alimentare continua cu energie, care este de acelasi ordin de marime cu energia de comanda;
- prezinta, in general, un factor de putere slab;
- amplificatorul de putere trebuie sa furnizeze si puterea reactiva necesara servomotorului;
- optimizarea performantelor dinamice se realizeaza mai dificil.
Din cauza acestor dezavantaje, servomecanismele de curent alternativ se utilizeaza numai pentru puteri mici.
In servomecanismele de curent alternativ se utilizeaza adeseori drept servomotor motorul asincron bifazat MASB.
MASB este asemanatoare, sub aspect constructiv, cu MAS monofazat cu infasurare auxiliara.
In cazul MASB rotorul poate fi:
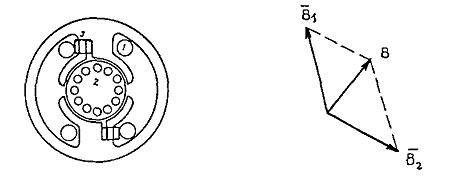
- de tip obisnuit (in colivie de veverita, figura 5)
- de tip special, cu inertie redusa (in forma de pahar nemagnetic sau de cilindru gol feromagnetic).

Fig. 5
Servomotorul asincron bifazat are statorul realizat din tole de otel electrotehnic cu simetrie cilindrica, la a carui periferie interioara sunt prevazute crestaturi, in crestaturi sunt plasate doua infasurari decalate in spatiu cu 90 (grade electrice). Una din ele este denumita infasurare de excitatie, si ramane in permanenta conectata la o retea monofazata de alimentare, iar cealalta este denumita infasurare de comanda si la bornele ei se aplica semnalul de comanda.
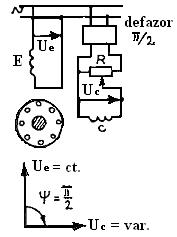
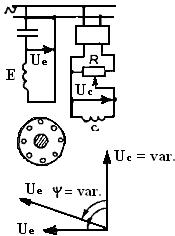
Sunt posibile trei moduri diferite de a comanda acest servomotor (Fig.6):
- variatia amplitudinii
tensiunii de comanda, tensiunea de excitatie
fiind constanta ca valoare efectiva si permanent defazata
cu 90
fata
de tensiunea de comanda (Fig. 6.a);
- variatia fazei tensiunii de
comanda, a carei valoare efectiva este in
permanenta constanta, la fel ca si valoarea efectiva a
tensiunii de excitatie (Fig. 6.b);
- variatia amplitudinii tensiunii de comanda si intercalarea in circuitul de excitatie a unui condensator C, tensiunea aplicata circuitului de excitatie fiind preluata de la aceeasi sursa ca si tensiunea de alimentare a amplificatorului de putere A care comanda servomotorul (Fig. 6.c).

a. b. c.
Fig. 6. Metode de comanda a servomotorului asincron bifazat
Ultimul mod de comanda a servomotorului conduce la o instalatie mai simpla si prezinta, in general, performante superioare, ceea ce a impus larga sa raspandire.
Principiul de functionare al servomotorului asincron bifazat este relativ simplu. Sa presupunem ca infasurarea de excitatie este alimentata de la o retea monofazata si tensiunea la bornele sale este Ue, iar infasurarea de comanda are tensiune nula la borne, in acest caz avem a face cu un motor monofazat clasic, infasurarea monofazata de excitatie produce un camp fix, pulsatoriu, cu repartitie sinusoidala in spatiu (daca ne referim numai la armonica fundamentala spatiala) si variatia sinusoidala in timp. Acest camp fix se poate descompune in doua campuri invartitoare, de aceeasi amplitudine si viteza, dar cu sensuri diferite de rotatie. Sub influenta acestor doua campuri invartitoare, rotorul in colivie de veverita este supus actiunii a doua cupluri egale si de sens contrar, in consecinta, cand mi exista semnal de comanda, servomotorul sta in repaus.
Atunci cand amplificatorul A produce o anumita tensiune Uc la bornele infasurarii de comanda a servomotorului, situatia se schimba, intocmai ca la motorul asincron monofazat cu faza auxiliara, de data aceasta la periferia interioara a statorului actioneaza doua solenatii, decalate in spatiu si defazate in timp (defazajul in timp este cauzat, de exemplu, de condensatorul C), in acest caz, se produc tot doua campuri invartitoare, de aceeasi viteza, de sensuri diferite, dar de amplitudini diferite. Asupra rotorului se exercita doua cupluri de sensuri diferite, dar si de valori diferite, ceea ce inseamna un cuplu rezultant diferit de zero. Daca acest cuplu rezultant depaseste cuplul static rezistent, atunci servomotorul se pune in miscare. Acest cuplu rezultant este cu atat mai mare cu cat tensiunea Ue de comanda este mai mare, iar defazajul dintre fazorii Uc si Ue este mai apropiat de 90
Spre deosebire de motorul asincron monofazat utilizat in actionarile curente, care odata pornit continua sa se roteasca si dupa deconectarea fazei auxiliare, servomotorul prezentat mai sus trebuie sa se autofraneze la disparitia semnalului de comanda. Aceasta este o conditie impusa de faptul ca servomotorul este incadrat ca element component intr-un servomecanism. Daca servomotorul ar continua sa se roteasca si dupa anularea tensiunii Uc, atunci servomecanismul nu ar mai avea rost, functionarea sa fiind complet instabila.
Din fericire, prin mijloace constructive, se pot realiza servomotoare care sa indeplineasca conditia de autofranare la disparitia semnalului de comanda. Ne propunem sa analizam aceasta problema in cele ce urmeaza.
Se stie ca un motor asincron monofazat poate fi echivalat cu un motor asincron trifazat avand doua infasurari trifazate statorice in serie si un singur rotor. Cele doua infasurari statorice produc campuri invartitoare de aceeasi amplitudine si viteza, dar de sensuri contrarii. Sub actiunea unuia din campurile invartitoare, fie el numit camp direct, rotorul este solicitat de un cuplu direct Md, de acelasi sens cu campul inductor. Acest cuplu variaza in functie de viteza W a rotorului, conform curbei din figura 7, a. In acelasi timp, sub actiunea celuilalt camp invartitor, denumit invers, rotorul este solicitat de un cuplu invers Mi, a carui variatie in functie de viteza unghiulara este redata tot in figura 8.8,a. In cazul motoarelor utilizate in actionarile curente, cuplurile Md, Mi prezinta un maxim pentru viteze unghiulare apropiate de vitezele respective de sincronism (alunecari critice subunitare). In aceasta situatie, cuplul rezultant M variaza in functie de viteza unghiulara W, conform curbei ingrosate din figura a.
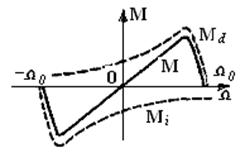

Fig.
Aceasta curba evidentiaza faptul ca daca motorul a functionat sub actiunea fazei auxiliare la o anumita viteza W in sens direct, la deconectarea brusca a fazei auxiliare, motorul continua sa dezvolte un cuplu rezultant direct, continuand sa se roteasca cu o viteza unghiulara apropiata de W
Daca curbele Md = f(W) si Mi = f(W prezinta maxime la viteze directe unghiulare, negative fata de vitezele respective de sincronism (la alunecari critice supraunitare), situatia se schimba cu totul, asa cum se arata in figura b. De data aceasta, daca la un moment dat motorul se rotea in sens direct cu viteza unghiulara W si se deconecteaza brusc faza auxiliara, motorul ramanand numai sub actiunea unei singure infasurari, el va dezvolta un cuplu rezultant de sens invers, adica de franare. In cele din urma, in acest caz, motorul se opreste. Se stie ca se poate deplasa maximul cuplului unui motor asincron spre alunecari critice de valoare ridicata, marind rezistenta echivalenta a infasurarii de faza rotorice, adica a barelor coliviei de veverita. Prin marirea rezistentei rotorice, valoarea cuplului maxim nu se schimba. Asadar, spre deosebire de motorul asincron monofazat cu faza auxiliara, utilizat in actionari electrice, motorul asincron utilizat intr-un sistem de reglare automata are rezistente echivalente rotorice relativ mari, ceea ce asigura autofranarea la disparitia semnalului de comanda.
Din nefericire, aceasta rezistenta rotorica marita conduce la micsorarea simtitoare a randamentului energetic al servomotorului, in acest fel se explica in buna masura faptul ca asemenea servomotoare se utilizeaza numai la puteri mici, unde problema randamentului, nu se pune, in general in discutie.
In continuare vom cauta sa deducem ecuatia caracteristicii mecanice M=f(W (in regim permanent) a servomotorului asincron. Atragem atentia asupra faptului ca la servomotor se obisnuieste o alta definitie o caracteristicii mecanice M = f(W), in loc de, W = f(M) ca in cazul actionarilor clasice.
Vom apela la metoda componentelor simetrice, intrucat sistemul de fazori Ue, Uc nu reprezinta, in general, un sistem simetric, echilibrat. De obicei, condensatorul C se alege de asa maniera, incat, la pornire, sub tensiunea de comanda maxima admisibila, fazorii Ue, Uc sa formeze un sistem simetric, echilibrat, la tensiunea data a retelei unice monofazate de alimentare. In acest caz, pentru orice alta situatie cand tensiunea Uc nu este maxima, sau servomotorul se roteste, sistemul Ue, Uc este nesimetric (Fig. 8).
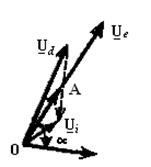
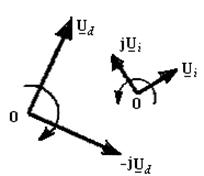
Fig. 8.
Acest sistem se poate descompune conform relatiilor de mai jos, intr-un:
- sistem simetric echilibrat de succesiune directa, Ud, -jUd
- si un alt sistem, tot simetric echilibrat de succesiune inversa, Ui, jUi
Ue = Ud +Ui
Uc jUd+ jUi
Din relatiile de mai sus se deduce imediat:
![]() ;
; ![]()
Pe baza acestui sistem sau al constructiei grafice din figura 8, in care s-a notat cu a unghiul dintre fazorii Uc si Ue se poate scrie:
![]()
![]()
Sistemul de tensiuni Ud, -jUd de succesiune directa, produce un sistem analog de curenti in cele doua infasurari (de excitatie si comanda), presupuse identice. In acest fel se produce un camp invartitor direct si un cuplu direct Md. La pornire (W = 0) cuplul direct dezvoltat Mdp este proportional cu patratul tensiunii Ui conform celor cunoscute din teoria motorului asincron functionand in conditii de simetrie, Mdp = k0Ud2.
Sistemul invers de tensiuni Ui, jUi produce un sistem analog de curenti, care, la randul lor, produce un camp invartitor invers. Sub actiunea acestui camp invartitor asupra rotorului se exercita un cuplu invers. La pornire, cuplul invers dezvoltat Mip este proportional cu patratul tensiunii Ui coeficientul de proportionalitate k0 fiind functie de parametrii infasurarilor, Mip = k0Ui2.
Cuplul rezultant, ce se exercita asupra rotorului sub actiunea combinata a celor doua campuri invartitoare, la pornire va fi:
Mp=Mdp - Mip= k0(Ud2 - Ui2) = k0 Ue Uc sina
Se remarca imediat faptul ca acest cuplu de pornire al servomotorului este proportional cu tensiunea Uc, care reprezinta marimea de comanda. Prin urmare, servomotorul reprezinta la pornire un traductor tensiune-cuplu, daca tensiunea de excitatie este constanta. Analogia cu servomotorul de curent continuu este evidenta.
Pentru a deduce expresia analitica a caracteristicii mecanice a servomotorului, trebuie cunoscuta, in cazul cand aceasta caracteristica ar fi liniara, pe langa valoarea cuplului de pornire Mp si panta F a dreptei reprezentative.
Caracteristica mecanica Md = f(W este, cu foarte buna aproximatie, un segment de dreapta in intervalul (W W W fiind viteza de sincronism (fig. 9), deoarece cuplul maxim este atins la o valoare negativa relativ ridicata ca valoare absoluta a vitezei unghiulare (alunecare critica supraunitara, in mod curent 2-4). Acelasi lucru se poate afirma si despre caracteristica Mi =f(W

Fig. 9.
Tinand seama de faptul ca Mi este cuplu invers in diagrama din figura 9, caracteristica Mt = f(W) apare ca un segment de dreapta intervalul (W W ) in cadranele III si IV. Pantele celor doua caracteristici se pot deduce imediat, abstractie facand de semn:
 ;
; 
Din cele doua caracteristici partiale se poate deduce caracteristica mecanica rezultanta a servomotorului M = f(W), reprezentata prin linie ingrosata in figura 9. Desigur, in intervalul (W W ) caracteristica rezultanta este tot un segment de dreapta, a carui panta este:
![]()
sau
Asadar, panta caracteristicii mecanice a servomotorului asincron este functie de tensiunea de comanda, spre deosebire de servomotorul de curent continuu comandat prin circuitul rotoric, la care panta caracteristicii mecanice era independenta de semnalul de comanda. Aceasta constatare introduce neliniaritate in comportarea servomotorului asincron.
Ecuatia analitica a caracteristicii mecanice a servomotorului studiat, va fi deci:

In cazul
introducerii marimilor fara dimensiuni  si
si
 , ecuatia caracteristicii ia urmatoarea forma:
, ecuatia caracteristicii ia urmatoarea forma:
![]()
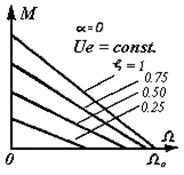
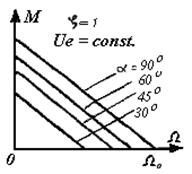
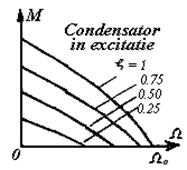
a. b. c.
Fig. 10.
In figura 10 s-au reprezentat familiile de caracteristici mecanice obtinute pe baza ecuatiei de mai sus, pentru diferite moduri de comanda a servomotoarelor. Figurile evidentiaza faptul ca servomotorul asincron nu este un element liniar, datorita pantei F care variaza odata cu tensiunea de comanda (fig. 10.a si c) sau datorita cuplului de pornire proportional cu sina (fig. 10.b). La aceasta observatie trebuie sa adaugam si neliniaritatea introdusa functional de servomotor, in sensul ca curba M = f(W nu este decat cu aproximatie o dreapta in intervalul (W W
Functia de transfer a servomotorului se poate deduce in ipoteza neglijarii procesului tranzitoriu electromagnetic in raport cu procesul tranzitoriu electromecanic, pe baza faptului ca constanta de timp electromecanica este mai mare decat constantele de timp ale infasurarilor, datorita inertiei pieselor in miscare ale servomecanismului.
In consecinta, se poate scrie urmatoarea ecuatie a regimului dinamic, in ipoteza unei sarcini avand numai inertie:
![]()
sau
![]()
de unde rezulta functia de transfer a servomotorului asincron:
in care Tem = J/F reprezinta constanta de timp electromecanica a servomotorului, q fiind unghiul de pozitie al rotorului.
De remarcat faptul ca frecarea vascoasa introdusa pe cale functionala de catre servomotor se adauga frecarii vascoase existente in servomecanism si contribuie la micsorarea constantei de timp electromecanice (si implicit la marirea stabilitatii). Semnalam totodata ca aceasta frecare vascoasa functionala variaza in functie de tensiunea de comanda. La semnale mici de comanda, frecarea vascoasa F este mai mica si in consecinta constanta de timp Tem va fi mai mare. De aceea este recomandabil ca in calculele de stabilitate ale servomecanismului sa utilizam aceasta frecare vascoasa functionala corespunzatoare semnalelor slabe de comanda, pentru a avea rezultate acoperitoare (fig. 10.a si c).
In ultimii ani, varianta constructiva a servomotorului descris mai sus, si anume servomotorul cu rotorul in forma de pahar (cu rotor gol sau tip Ferraris), redat schematic in figura 11, a cunoscut o larga raspandire in automatica, telemasuri sau masini analogice.
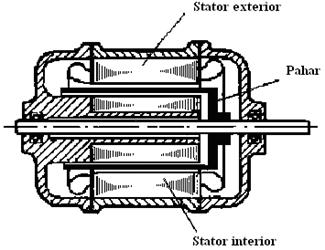
Fig. 11.
Principiul de functionare al acestui servomotor nu difera cu nimic de principiul de functionare al variantei cu rotor cu colivie de veverita, intr-adevar, daca ne-am imagina ca numarul de bare al coliviei de veverita ar creste nelimitat, atunci colivia s-ar transforma intr-un strat conductor de anumita grosime, situat la periferia rotorului. Ne putem imagina in continuare ca acest strat conductor, acest invelis conductor cilindric este desprins de restul rotorului si este solidar cu arborele masinii (Fig. 11). Stratul conductor formeaza adevaratul rotor al masinii. Data fiind forma acestui rotor si luand in consideratie si discul de baza necesar fixarii peretelui cilindric de arbore, denumirea de rotor in forma de pahar este pe deplin justificata si sugestiva. Partea care a mai ramas din rotorul colivie prin aceasta transformare, care are acum doar rol de piesa constructiva necesara inchiderii fluxului magnetic, nu trebuie sa mai fie solidara cu arborele motorului, ea devenind un stator interior rotorului in forma de pahar. Statorul exterior poarta in crestaturile sale infasurarile de excitatie si de comanda obisnuite.
In acest fel, s-a realizat un servomotor al carui rotor poseda un moment de inertie foarte mic, cu o constanta de timp electromecanica de cateva zeci de ori mai mica fata de servomotorul cu rotorul in colivie. Un alt avantaj important al servomotorului cu rotorul in forma de pahar consta in faptul ca prezinta mult mai reduse posibilitati de "prindere" magnetica, deoarece rotorul nu mai este crestat. Existenta crestaturilor pe armaturile motorului poate conduce la o anumita pozitie privilegiata a rotorului in raport cu statorul, la o "intepenire" sau "prindere" magnetica. Pentru a scoate rotorul din aceasta pozitie este nevoie de un anumit cuplu si deci de o anumita intensitate a semnalului de comanda. Aceasta "prindere" magnetica contribuie la marirea zonei de insensibilitate a servomecanismului. In cazul servomotorului cu rotorul in forma de pahar, exista crestaturi doar pe stator, in timp ce rotorul este perfect neted, ceea ce explica micsorarea posibilitatilor de "prindere".
Precizam ca servomotorul cu astfel de rotor prezinta un intrefier mult marit (intrefierul dintre statorul exterior si pahar, plus grosimea paharului plus intrefierul dintre pahar si statorul interior), ceea ce conduce la o putere reactiva relativ ridicata si deci un slab factor de putere. Din acest motiv, acest tip constructiv de servomotor se utilizeaza la puteri foarte mici (fractiuni de watt - cativa wati) si, in general, la frecvente ridicate (400-500 Hz).
Cursul 3
1.3. Micromotorul cu poli ecranati (MPE)
MPE este un motor monofazat, construit, adesea, in varianta cu poli aparenti. Pe polii aparenti ai statorului (figura 12.a) este plasata infasurarea monofazata (1). La aproximativ 1/3 din arcul piesei polare este prevazuta cate o crestatura prin care trece latura unei spire in scurtcircuit (3). Aceasta spira, impreuna cu infasurarea corespunzatoare de pe pol, formeaza un transformator.
In intrefierul MPE se compun cele doua campuri magnetice: inductor (de inductie B1) si indus (de inductie B2), campul rezultant avand inductia B (figura 12.b). Campul total induce un curent in infasurarea rotorului (2). In acest mod apare un cuplu electromagnetic care se exercita asupra rotorului.
a. Schita motorului monofazat b. Inductiile din intrefierul
cu poli ecranati (cu spira in scurtcircuit) motorului cu poli ecranati
Fig. 12. Motor monofazat cu poli ecranati
MPE are capacitatea de pornire si factorul de putere de valori reduse ceea ce implica limitarea puterilor nominale la nivelul "foarte mici' (maxim 25W).
2. Masini electrice speciale sincrone
Ca urmare a proprietatii esentiale (proportionalitatea intre viteza si frecventa tensiunii de alimentare) motoarele sincrone speciale (MSS) se utilizeaza frecvent in SAEA la care viteza de rotatie se doreste a se mentine riguros constanta sau direct proportionala cu frecventa de comanda. MSS sunt construite fara contacte alunecatoare.
2.1. Motorul pas-cu-pas (MPP)
Motorul pas-cu- pas este deseori numit si motor sincron cu impulsuri care transforma impulsurile electrice de tensiune in deplasari unghiulare bine definite ale rotorului. Unghiul minim de deplasare a rotorului se numeste pas.
Motoarele pas cu pas si-au gasit o larga aplicabilitate in sistemele de comanda automata pe baza de program a actionarilor masinilor-unelte, a unor mecanisme si dispozitive, in tehnica rachetelor. Ele indeplinesc deci functia unor elemente decodificatoare, transformand informatia primita sub forma de impulsuri electrice in pasi unghiulari de pozitie.
Din punct de vedere constructiv MPP se realizeaza in mai multe variante:
- cu infasurari de comanda distribuite sau concentrate;
- cu rotor avand poli aparenti fara infasurare de excitatie (motor sincron reactiv);
- cu rotor avand magneti permanenti;
- cu unul sau mai multe statoare.
Principalii parametrii ai MPP sunt:
a) Pasul - valoarea unghiului de rotatie realizat la primirea unui impuls de comanda;
b) Cuplul critic - cuplul rezistent minim opus de sistem la care rotorul nu se pune in miscare la primirea unui impuls de comanda:
c) Cuplul limita - cuplul rezistent maxim la care, pentru o frecventa data a impulsurilor, MPP raspunde fara a pierde pasi;
d) Frecventa maxima de pornire - frecventa impulsurilor de comanda la pornire pentru care motorul nu pierde pasi. In mod analog se defineste si o frecventa maxima de oprire.
Principalele caracteristici ale MPP sunt:
a) Caracteristica unghiulara, Me= f(q), este similara cu caracteristica MS.
b) Caracteristica limita de frecventa (caracteristica dinamica) - arata cat de mare poate fi cuplul de sarcina MS, la anumita frecventa de comanda (f), pentru ca MPP sa nu piarda pasi (figura 14.b).
Datorita avantajelor pe care le ofera (ex. actionare directa, fara transmisii si conversii de miscare rotativa-liniara, in conditiile unei precizii ridicate), MPP liniar se impune pe scara tot mai larga (o aplicatie tipica o reprezinta inregistratorul in coordonate).
Cursul 4
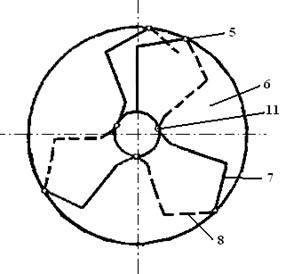
Un prim tip de motor pas-cu-pas reactiv, utilizat deseori in actionarea masinilor-unelte, are statorul cu poli aparenti cu infasurari de comanda concentrate in numar de sase (figura 13). Bobinele polilor diametral opusi se conecteaza in serie si cele trei circuite astfel realizate pentru cei sase poli se alimenteaza de la o sursa de curent continuu prin intermediul unii comutator electronic.
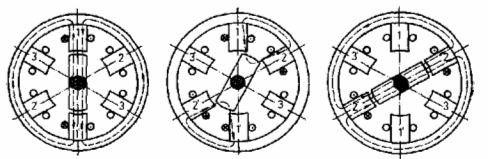
Fig. 13. Motor pas-cu-pas reactiv cu infasurari de comanda concentrate
Rotorul motorului este cu poli aparenti (fara infasurare) in numar de doi. La aplicarea unui puls de curent in bobinele, polilor 1-1' rotorul este supus unui cuplu reactiv, sub actiunea caruia rotorul se deplaseaza pana axa sa coincide cu axa polilor (figura 13.a). Daca apoi se alimenteaza bobinele polilor atunci rotorul se deplaseaza inspre polii ocupand in cele din urma o pozitie in care axa sa coincide cu axa de simetrie pasul realizat fiind de 60 (fig. 13.b). Continuand in maniera prezentata alimentarea succesiva a bobinelor statorice, motorul pas-cu-pas descris realizeaza 6 pasi la o rotatie completa.
Daca rotorul are patru proeminente polare, atunci sub actiunea a doua pulsuri succesive de excitatie, pasul realizat este de 30. In acest fel motorul realizeaza la o rotatie un numar dublu de pasi, adica 12.
O marire a numarului de pasi la o rotatie completa se poate obtine in continuare prin marirea numarului de poli pe rotor si pe stator.
O solutie practica, numita MPP reactiv reductor, este prezentata in figura 14.a. Statorul poseda opt proeminente polare cu bobine de excitatie realizand patru circuite de comanda a pozitiei rotorului, conectate in serie si alimentate de la o sursa de curent continuu prin intermediul unui comutator electronic.
In figura s-a evidentiat starea corespunzatoare aplicarii unui impuls de tensiune (implicit curent) bobinelor de pe polii diametral opusi 1-1'; ca urmare datorita cuplului reactiv, dintii rotorului s-au aliniat fata in fata cu dintii polilor 1-1'.
Rotorul poseda 18 dinti si 18 crestaturi repartizate uniform. O proeminenta polara statorica este formata din doi dinti si o crestatura intermediara cu deschideri unghiulare exact egale cu cele ale dintilor si crestaturilor rotorice.
Daca se alimenteaza infasurarile 1-1', atunci cuplul reactiv care se dezvolta asupra rotorului aduce rotorul in pozitia din figura 14, cand celor doi dinti ai proeminentelor 1 si 1' li se opun doi dinti statorici.
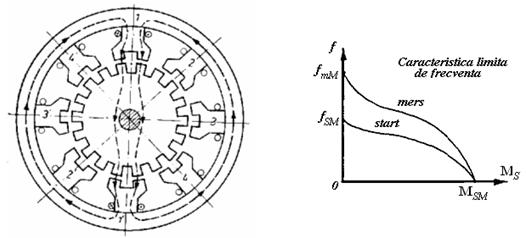
a. Motorul pas cu pas reactiv reductor b. Caracteristica MSM limita
de frecventa
Fig. 14. Motorul pas cu pas reactiv reductor
Daca apoi se alimenteaza infasurarile 2-2' si se intrerupe alimentarea infasurarilor 1- atunci noul cuplu reactiv deplaseaza rotorul in sensul acelor ceasornicului cu exact o jumatate de dinte, pentru ca din nou dintilor magnetizati ai proeminentelor sa li se opuna dinti rotorici (ceea ce corespunde anularii cuplului, din motive de simetrie magnetica). Deoarece deschiderile dintilor si crestaturilor rotorice sunt egale, pasul executat corespunde la 5. Prin urmare, prin alimentarea succesiva a infasurarilor motorul realizeaza 72 pasi la o rotatie completa.
Prin combinatii de numar de dinti si crestaturi se poate realiza teoretic orice numar de pasi se doreste.
Precizia pozitionarii in sistemele automate utilizand MPP creste odata cu cresterea numarului de pasi la o rotatie completa. Aceasta implica cresterea numarului de poli pe stator si rotor.
In practica numarul de pasi este insa limitat pe de o parte de cerintele procesului tehnologic, iar pe de alta parte din considerente de cuplu, marirea numarului de pasi duce evident la micsorarea valorii cuplului electromagnetic care asigura schimbarea pozitiei rotorului la comutatia infasurarilor statorice.
Motoarele pas-cu-pas de tip reactiv dezvolta cupluri electromagnetice de sincronizare mai mici, dar pot fi utilizate la frecvente de succesiune a pulsurilor de comanda de pana la 2000-3000 Hz.
In figura 15 se reprezinta schema constructiva a MPP hibrid liniar. Acest MPP are atat magnet permanent (MP) cat si electromagneti (EMA, EMB). Armatura fixa (AF) este danturata.
In absenta curentului prin infasurarea unui electromagnet (EMA in figura 15.a) glisorul se aseaza astfel incat reluctanta circuitului pentru liniile de camp ale MP sa fie minima. Prin alimentarea electromagnetului (EMB), campul magnetic, in zona (3) se intareste, iar in zona (4) se reduce (se anuleaza).
Daca la tactul urmator se alimenteaza electromagnetul (EMA in figura 15.b) si se intrerupe alimentarea lui (EMB), atunci, sub actiunea fortei electromagnetice, glisorul se deplaseaza cu un sfert de pas dentar.
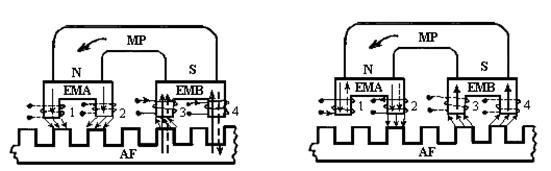
Fig. 15. Schema constructiva a motorului sincron pas-cu-pas hibrid
O alta solutie de motor pas-cu-pas o reprezinta motorul cu magneti permanenti pe rotor. O sectiune transversala prin acest motor este reprezentata in figura 16.a.

a. b.
Fig. 16. Motor pas-cu-pas cu magneti permanenti pe rotor
Statorul este format din patru segmente, fiecare cu cate 8 poli si cu cate o infasurare de comanda. Polii statorici ai celor patru segmente sunt unul in prelungirea celuilalt in lungul axului motorului. Cele patru infasurari statorice sunt alimentate succesiv. Coaxial cu fiecare segment statoric se afla cate un segment rotoric cu 8 poli alternativi din magneti permanenti. Spre deosebire de stator segmentele rotorice sunt decalate uniform spatial, cum sugereaza figura 16.b, cu un sfert din pasul polar al masinii, adica cu 360 8=11,25. Segmentele rotorice sunt solidare cu arborele motorului.
Daca se alimenteaza infasurarea primului segment statoric, atunci cei 18 poli ai sai se magnetizeaza devenind alternativ Nord si Sud. Sub influenta acestui camp polii - magneti permanenti ai primului segment rotoric se deplaseaza odata cu rotorul pentru a lua pozitia din figura 16.a.b.
Intrerupand legatura cu sursa a infasurarii primului segment statoric si alimentand infasurarea celui de al doilea segment, noii poli statorici ocupa aceeasi pozitie ca mai inainte, dar ei interactioneaza cu polii-magneti permanenti ai celui de al doilea segment rotoric, care se afla initial decalati cu un sfert din pasul polar. Sub influenta cuplului care apare, rotorul este deplasat cu 11,25 si adus in pozitia in care unui pol Nord i se opune un pol Sud rotoric. Se alimenteaza apoi infasurarea celui de-al treilea segment statoric, producandu-se un nou pas de 11,25 al rotorului. In total, un asemenea motor poate realiza 32 de pasi la o rotatie completa.
Motoarele pas-cu-pas cu magneti permanenti pot ajunge pana la 300-400Hz.
In figura 17 este reprezentata un motor pas-cu-pas cu trei grupe de statoare si rotoare, decalate alternativ.
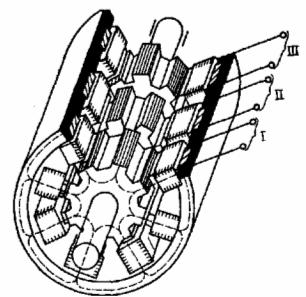
Fig. 1 Motor pas-cu-pas cu mai multe statoare si rotoare decalate alternativ
Criteriile dupa care se apreciaza performantele motorului pas-cu-pas sunt marimea cuplului reactiv de sincronizare (de care depinde eroarea de pozitie unghiulara) si viteza de raspuns (timpul de realizare al unui pas), de dorit cat mai ridicate; masura in care se amortizeaza oscilatiile mecanice ale rotorului la trecerea de pe o pozitie pe alta; frecventa posibila a comutarilor (astfel ca rotorul sa ocupe pozitiile corespunzatoare impulsurilor de tensiune aplicate, fara a pierde nici un pas); siguranta in functionare, etc. Marirea cuplului sincronizant si limitarea oscilatiilor mecanice pendulare, se obtin prin utilizarea rotoarelor din magneti permanenti sau prin prevederea unor bare de amortizare in armaturile rotorice.
Cursul 5
2.2. Masini sincrone cu magneti permanenti (MSMP)
Categorisirea, sub aspect constructiv a MSMP, are in vedere pozitia directiei de magnetizare in raport cu sistemul de coordonate cilindrice, legat de rotor. Pozitia respectiva poate fi: radiata, tangentiala, radial - tangentiala sau axiala.
Magnetii permanenti utilizati pot fi piese masive sau pastile.
In continuare sunt enumerate MSMP mai frecvent utilizate.
a) MSMP cu magneti masivi magnetizati radial se intalneste in doua variante:
- cu poli aparenti (magnetul permanent asezat direct pe ax)
- de tip Permasyn (rotorul realizat dintr-un ansamblu de magneti permanenti infasurat intr-un inel de tole).
Ambele variante au colivie de pornire.
b) Motorul Siemens se incadreaza in categoria MSMP avand magnetizare radiala, dar are rotorul in exterior. Are magneti din ferita, de forma unui sector tubular cilindric. Pe suprafetele interioare ale magnetilor se fixeaza piesele polare din otel, in crestaturile carora se introduc barele coliviei de pornire.
c) MSMP cu pastile magnetice magnetizate radial are magnetii plasati in interiorul unui inel rotoric asamblat din tole.
Rotorul are colivie de pornire.
d) MSMP cu pastile magnetice magnetizate tangential se construiesc, in general, pentru un numar mare de poli.
Nu au colivii de pornire si deci nu pot porni in conditiile alimentarii de la o sursa de frecventa constanta.
e) MSMP cu pastile magnetice magnetizate radial - tangential au magnetii, din pastile de ferite, paralelipipedice, asamblati impreuna cu tolele rotorului, intregul ansamblu fiind fixat prin barele coliviei de pornire.
Magnetii sunt realizati din ferita sau pamanturi rare de cobalt.
f) MSMP cu magnetizatie axiala se intalneste in mai multe variante constructive:
- motorul Volkrodt care are doi magneti in forma de disc, magnetizati axial; - MSMP cu rotorul in forma de roti polare, magnetizate radial (utilizate ca GS cu MP);
- MSMP avand rotorul cu poli "ghiara'.
3. Masini electrice speciale de curent continuu (MCCS)
Masina electrica de curent continuu (MCC) este elementul de executie cu cea mai larga raspandire in sistemele de actionare cu viteza reglabila.
Varianta clasica a MCC prezinta dezavantajele:
- constante de timp (mecanica si electrica) relativ mari;
- capacitate de supraincarcare relativ redusa;
- caracteristici de reglare neliniare.
Aceste dezavantaje pot fi eliminate prin construirea unor MCC speciale (MCCS), dintre care s-au impus urmatoarele tipuri:
- motorul de c.c. cu comutatie statica;
- motorul de c.c. cu magneti permanenti (inductorul-stator este din magneti permanenti, iar indusul-rotor este de tip clasic);
- motorul de c.c, cu rotor disc;
- motorul de c.c. cu rotor pahar.
3.1. Motorul de curent continuu cu comutatie statica (MCC-CS)
Inlocuirea colectorului cu un comutator static (CS) elimina dezavantajele MCC clasic si permite obtinerea unor motoare cu turatii ridicate (pana la 30.000 rot/min), silentioase, fiabile, indicatori energetici superiori.
MCC-CS (numit si servomotor de c.c. cu comutatie statica) este compus:
- dintr-un motor propriu-zis;
- dintr-un comutator static (CS);
- dintr-un traductor de pozitie (TPi) (figura 18).
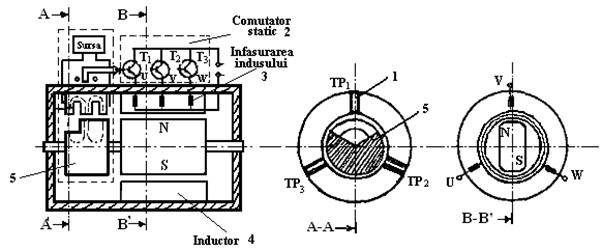
a. Compunerea sistemului; b. sectiune prin traductorul de pozitie; c. sectiune prin motor: 1 - miez feromagnetic; 2 - Comutator static; 3 - Infasurarea indusului; 4 - Inductor; 5 - armatura feromagnetica
Fig. 18. Schema constructiva a unui motor de c.c. cu comutatie statica
In acest caz rotorul are rol de inductor, iar infasurarea indusa este plasata in stator, infasurarea indusa este similara cu cea a MS polifazate obisnuite. Rolul TPi este de a detecta pozitia axei campului magnetic inductor si de a comanda deblocarea unui tranzistor (tiristor) din cadrul CS care sa asigure curentul prin sectiunea infasurarii indusului a carei axa are decalajul cel mai apropiat de 90 in urma axei campului magnetic inductor, TPi din figura 18 este de tip transformator-diferential .
CS are rol de invertor, deci transforma curentul continuu in c.a a carui frecventa este strict dependenta de viteza de rotatie a motorului. Din acest motiv MCC-CS poate fi considerat si ca MS. Daca semnalul de la iesirea TP este prea slab pentru a asigura comanda CS, intre TP si CS se vor prevedea amplificatoare interne.
Caracteristicile de functionare ale MCC-CS sunt asemanatoare cu caracteristicile MCC cu colector. MCC-CS poate fi comandat in impulsuri aplicate in circuitul de alimentare al TP.
MCC-CS se utilizeaza in sistemele de pozitionare, la aparatele portabile de inregistrare si redare a sunetului , sistemele periferice ale calculatoarelor, la potentiometrele cu motor, in sistemele de urmarire a avansului a motorului universal, etc.
Cursul 6
Motorul de curent continuu cu rotor disc (MCC-RD)
Motorul de curent continuu cu rotorul disc si, in consecinta, intrefier axial, este alcatuit din:
- doua flanse
- rotorul disc
- sistemul colector-perii (figura 19).
a. Vedere generala b. Sectiune
Fig. 19. Motorul de curent continuu cu rotor disc
l - magnet permanent; 2 - jug feromagnetic; 3 - disc; 4 - ax; 5 - punct de sudura; 6 - disc izolant; 7, - conductor de cupru pe fata/pe dos; 9 - perie; 10 - flanse
Flansele poarta (ambele sau numai una) magneti permanenti (1), care produc un camp magnetic axial ce se inchide prin jugurile feromagnetice (2).
Asemenea motoare au in locul unui intrefier cilindric un intrefier plan.
Rotorul este realizat sub forma unui disc subtire nemagnetic (3) fara crestaturi (din material ceramic sau textolit) cu o infasurare imprimata sau stantata si lipita din cupru (7,8) (ultima solutie reprezinta un brevet romanesc apartinand unui colectiv de la ICPE Bucuresti, unde se produce o serie intreaga de asemenea motoare).
Conductoarele sunt dispuse radial (figura 19. b pe o parte si pe alta a discului, fiind sudate la capete (5) prin scantei sau fascicul de electroni cu ajutorul unei masini automate, formand o infasurare ondulata. Colectorul poate fi constituit din insasi conductoarele plate de cupru ale rotorului pe care aluneca periile masinii.
Lamelele de colector (11) rezulta din prelungirea spre ax a conductoarelor. Alimentarea indusului se face prin periile care calca axial pe colector. Pentru remagnetizare, in caz de demagnetizare a magnetilor, adesea pe piesele polare se practica infasurari intr-un strat (12).
Excitatia masinii este asigurata de magneti permanenti de forma cilindrica cu axele perpendiculare pe discul-rotor, situati de o parte a discului (sau, uneori pe ambele parti). Numarul de poli difera de la motor la motor, fiind in general intre 6 si 12.
Ecuatia caracteristicii mecanice este de forma:
W = k1 UA k2 Me
k1, k2 - constante ale masinii
Deci viteza poate fi reglata prin reglarea tensiunii de alimentare. Alura caracteristicilor MCC-RD este aceeasi cu cea a caracteristicilor MCC cu excitatie separata avand fluxul constant.
Dintre avantajele motorului de curent continuu cu rotor disc, amintim:
Deoarece rotorul nu contine materiale feromagnetice, el este mult mai usor decat cel al motoarelor cu rotor cilindric, rezulta moment de inertie mai scazut.
Datorita lipsei crestaturilor pe rotor, nu apar intepenirile magnetice. Nu exista histerezis sau saturatie magnetica a dintilor si a jugului rotoric.
Un alt avantaj important este legat de faptul ca avand conductoarele in aer (discul poate functiona la temperaturi de 150 - 200), densitatea de curent poate fi mult crescuta (de 3-4 ori mai mare decat al MCC clasice), rezultand o economie de cupru.
Prezentand un intrefier relativ mare, iar conductoarele rotorice fiind in aer, scanteile la colector sunt practic eliminate, iar reactia inclusului nu influenteaza functionarea motorului.
Forma geometrica speciala (diametru relativ mare, lungimea relativ redusa) face ca aceste motoare sa fie utilizate cu precadere in unele aplicatii (roboti, actionarea valvelor, etc.).
Exista si dezavantaje ale motorului de curent continuu cu rotor disc legate de aceasta constructie speciala:
- conductoarele rotorice sunt in numar limitat;
- viteza relativ limitata din considerente mecanice (sub 3000 rot/min);
- pierderile suplimentare datorate curentilor Foucault in conductoare fac ca motoarele sa poata fi realizate la tensiuni reduse (30 - 80V).
- sunt sensibile la vibratii si socuri, caci probabilitatea deformarii lor este mai mare decat in cazul rotorului cilindric.
3.3. Motorul de curent continuu cu rotor pahar (MCC-RP)
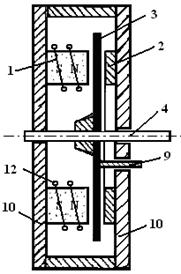
Motorul de curent continuu cu rotor pahar este reprezentat in figura.20, avand urmatoarele parti componente:
- un stator-inductor cu magneti permanenti (1);
- un jug interior fix (5);
- un rotor in forma de pahar (4) pe care este imprimata bobina indusului (3)
sistemul perii (7) - colector (6).
Momentul de inertie al MCC-RP este foarte redus, acest motor fiind cel mai rapid MCC.
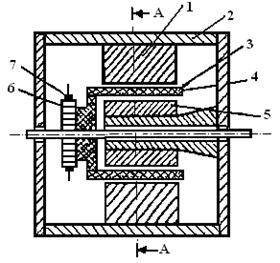
Fig. 20. Motorul de curent continuu cu rotor pahar
l - magnet permanent; 2 - carcasa; 3 - bobinajul indusului;
4 - cilindrul nemagnetic; 5 - jug interior; 6 - colector; 7 - perii.
Denumite si motoare cu rotor gol sau cu bobina mobila, aceste motoare au o infasurare rotorica dispusa si presata pe periferia exterioara cilindrica a unui pahar din fibra de sticla sau direct inglobata intr-o rasina expoxidica (figura 20).
In exteriorul rotorului pahar se afla magnetii permanenti fixati in carcasa, iar in interiorul paharului se afla un stator interior din material feromagnetic (uneori se intalneste constructia inversa, cu magnetii in interior). Tensiunea este aplicata infasurarii rotorice in mod obisnuit prin sistemul perii-colector.
Evident, marele avantaj al unei asemenea constructii consta in momentul foarte mic de inertie, ajungandu-se la constante electromecanice de timp sub 1 ms si printr-o geometrie adecvata (diametru mic, lungime axiala mare). Magnetii permanenti sunt de tipul Samariu-Cobalt, cu mare intensitate coercitiva, datorita intrefierului relativ mare al acestei masini.
Asemenea masini prezinta si toate avantajele rotorului disc: lipsa intepenirii magnetice si a histerezisului, densitate ridicata de curent, inertie extrem de redusa, geometrie adecvata unor aplicatii. Ele se realizeaza la puteri mici, sub 300 W, si turatii in gama 3 000 - 4000 rot/min.
Pentru a micsora caderea de tensiune la perii, se folosesc perii speciale din aliaje pretioase (aur, argint, paladium), care asigura totodata si o uzura deosebit de redusa.
Cursul 7
Transformatoare electrice speciale
In categoria transformatoarelor electrice speciale (TES) se incadreaza in principal:
- transformatoarele cu infasurari multiple;
- autotransformatorul;
- transformatoarele pentru schimbarea numarului de faze;
- transformatoarele de sudura;
- transformatoarele pentru cuptoare electrice;
- transformatoarele de masura si transformatoarele rotative;
- transformatorul traductor;
- transformatoare de impuls.
In cele ce urmeaza se face o sumara trecere in revista a TES cu mai larga utilizare in domeniul SAE.
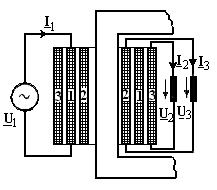
4.1. Transformatorul cu trei infasurari
Transformatoarele electrice cu trei, si in general, mai multe infasurari, se utilizeaza la cuplarea intre ele a trei sau mai multe retele electrice cu tensiuni diferite. Se utilizeaza un singur transformator in loc de mai multe si prin aceasta se obtine o economie substantiala.
Transformatoarele cu trei infasurari pot fi monofazate sau trifazate.
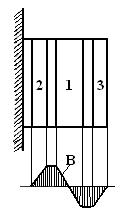
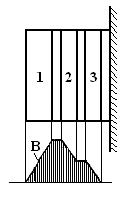
Elementele constructive sunt aceleasi ca si la transformatorul cu doua infasurari. Pe aceeasi coloana sunt plasate cele trei infasurari; dintre ele una este infasurare primara, celelalte, infasurari secundare. In mod obisnuit, langa miez se plaseaza infasurarea de joasa tensiune (JT), urmeaza cea de medie tensiune (MT) si apoi cea de inalta tensiune (IT) (fig. 21). Daca infasurarea de JT este infasurare primara, ea se plaseaza la mijloc, pentru a diminua campul de dispersie si deci caderile de tensiune in sarcina. In toate cazurile infasurarea de IT se plaseaza in exterior; din motive de izolatie
In general, transformatorul cu mai multe infasurari poate primi puterea printr-un numar oarecare de infasurari si o poate debita de asemenea prin mai multe.

Fig. 21. Transformator cu trei infasurari
Infasurarea primara poate fi de medie tensiune (MT), cand se plaseaza la mijloc, fie cea de joasa (JT) sau de inalta tensiune (IT), cand este in exterior. Din cauza campului magnetic de dispersie mutuala care inlantuie numai cate doua infasurari, este deosebire intre cele doua cazuri. Daca infasurarea primara (1) se afla plasata in exterior, atunci campul de dispersie este mai puternic si caderea de tensiune mai mare decat in cazul ca este plasata la mijloc, cum se vede in figura 22, b In mod obisnuit, infasurarea primara (1) se plaseaza la mijloc, chiar si atunci cand ea este de joasa tensiune (figura 22, a , infasurarea de medie tensiune (2) plasandu-se langa miez. Daca infasurarea de inalta tensiune este infasurarea primara (IT - 1), totusi din motive de izolatie aceasta se plaseaza in exterior, cat mai departe de miez.
a b.
Fig. 22. Asezarea infasurarilor la un Fig. 23. Transformator cu
transformator cu trei infasurari trei infasurari
Consideram transformatorul cu trei infasurari care are cea mai mare importanta in prezent, dintre toate cele cu infasurari multiple (figura 23).
Se analizeaza in continuare functionarea la sarcina simetrica, intrucat toate fazele sunt egal incarcate, este suficienta considerarea pentru studiu a cate unei singure faze de pe aceeasi coloana din fiecare infasurare. Studiul se face pentru transformatorul cu trei infasurari, dar este valabil si pentru cazul general al transformatorului cu m infasurari. Pentru simplificare se neglijeaza in continuare pierderile in fier si curentul total al transformatorului.
Se asociaza sensurile pozitive pentru curenti si tensiuni pentru infasurarea primara l corespunzator receptorului si pentru infasurarile secundare omoloage 2, 3, corespunzator sursei. Ca si la transformatorul cu doua infasurari, sensurile curentilor se aleg astfel, incat solenatia rezultanta ce determina campul magnetic principal, sa fie suma solenatiilor infasurarilor.
Ecuatiile de tensiuni obtin forma:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
unde
![]() , n
, n
Tinand cont de expresia lui yl ecuatiile de tensiuni devin:
![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
Considerand cum s-a convenit, neglijabila solenatia de magnetizare a transformatorului in comparatie cu solenatiile infasurarilor, avem si:
![]()
Ca si la transformatorul cu doua infasurari, pentru a elimina din ecuatii numerele de spire, se raporteaza parametrii infasurarilor la una de referinta, de exemplu infasurarea primara 1. Observam ca aici intervin rapoartele de transformare:
 ,
,  ,
, 
inmultind ecuatia (5) cu K12, pe (6 cu K13 si notand cum se stie:
K12U2 = U2' , K13U3 = U3',
 ,
,  ,
,
![]() ,
, ![]() ,
,
ecuatiile (5, 6, 7) devin:
![]() (9)
(9)
![]() (10)
(10)
![]() (11)
(11)
Din (8) avem de asemenea:
I1 + I2' + I3' = 0 (12)
Scazand ecuatiile (9) si (10) respectiv (9) si (11) si inlocuind pe I3' cu expresia rezultata din relatia (12), dupa aranjare, se obtine:
![]() (13)
(13)
![]() (14)
(14)
unde s-a notat cu:
![]() (15)
(15)
![]() (16)
(16)
![]() (17)
(17)
In baza ecuatiilor (13) si (14) se stabileste schema echivalenta a transformatorului cu trei infasurari reprezentata in figura 24. in care s-a notat:
wL1s = X1, wL2s = X2' , wL3s = X3'
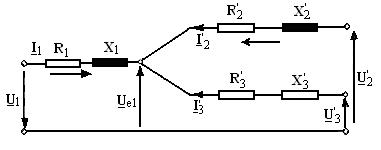
Fig. 24. Schema echivalenta simplificata a transformatorului
cu trei infasurari
Se urmareste in continuare modul de determinare al parametrilor schemei electrice echivalente.
Prin insumarea relatiilor (15) si (16) obtinem:
 (18)
(18)
unde prima paranteza din (18) rezulta inactivitatea de dispersie
L1s a
infasurarii l fata de infasurarea 2, in
ipoteza absentei infasurarii 3, iar cea de a doua paranteza,
inductivitatea de dispersie L2s a
infasurarii 2 fata de l, in aceeasi ipoteza.
Prin multiplicarea cu ![]() , L2s se
raporteaza la primar si prin urmare:
, L2s se
raporteaza la primar si prin urmare:
![]() (19)
(19)
Din (19) rezulta semnificatia inductivitatii Ls ca o inductivitate globala de dispersii, care determina reactanta de. scurtcircuit Xsc12 = wLs masurabila la bornele infasurarii primare l, infasurarea 2 fiind in scurtcircuit iar infasurarea 3, deschisa.
Analog, cu aceeasi semnificatie ca mai sus, se obtine:
![]() (20)
(20)
In sfarsit,
suma inductivitatilor ![]() ,
, ![]() din (16) si (17),
se poate pune sub forma:
din (16) si (17),
se poate pune sub forma:
 (21)
(21)
Dar L22 L32K23
= L2s si analog L33 L23
![]() = L3s ,
indicii avand acelasi rol ca mai sus. Rezulta ca suma din
paranteza ecuatiei (21) reprezinta inductivitatea globala de
dispersie Ls Prin inmultire cu
= L3s ,
indicii avand acelasi rol ca mai sus. Rezulta ca suma din
paranteza ecuatiei (21) reprezinta inductivitatea globala de
dispersie Ls Prin inmultire cu ![]() aceasta inductivitate se
raporteaza la infasurarea de referinta 1.
aceasta inductivitate se
raporteaza la infasurarea de referinta 1.
Pe baza celor de mai sus, rezulta ca inductivitatile de dispersie Lsij (la alta scara reactantele de scurtcircuit Xscij) pot fi determinate din probele de scurtcircuit partiale (infasurarea i alimentata, infasurarea j in scurtcircuit iar cea de a treia deschisa).
Se identifica pe aceasta cale reactantele de scurtcircuit:
Xsc12 = wLs , Xsc13 = wLs , Xsc23 = wLs (sau Xsc32 = wLs (22)
si tinand cont de: (15) - (21) se obtine:
![]() ,
,
![]() , (23)
, (23)
![]()
Din incercarile de scurtcircuit se determina si rezistentele de scurtcircuit Rsc12, Rsc13, Rsc23 , fiind valabile relatiile:
![]()
![]() (24)
(24)
![]()
Utilizand (23), (24) se obtin parametrii schemei echivalente din figura. 24
![]()
![]() (25)
(25)
![]()
si
![]()
![]() (26)
(26)
![]()
Diagrama fazoriala a transformatorului cu trei infasurari considerand schema echivalenta simplificata din figura 24 este prezentata in figura 25.
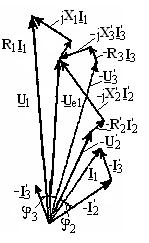
Fig. 25. Diagrama fazoriala simplificata a transformatorului
cu trei infasurari
Observam ca pentru curenti I ', I3' si defazajele j j , dati, trasarea ei nu se face imediat ci prin cateva aproximatii succesive, astfel incat la considerarea tuturor caderilor de tensiune in ramurile schemei echivalente strabatute de acesti curenti, sa se obtina aceeasi tensiune electromotoare Ue1 In continuare se stabileste simplu curentul I1: si tensiunea U1.
Transformatorul cu trei infasurari ridica unele probleme legate de verificarea la incalzire la sarcina nominala. In literatura de specialitate, se cunosc mai multe metode de incercare. Dintre ele, pentru transformatorul cu doua infasurari, cea mai simpla si avantajoasa este incercarea in scurtcircuit la curenti intrucatva mariti fata de cei nominali, astfel ca transformatorul sa absoarba o putere cat suma tuturor pierderilor (in fier si infasurari) ce apar la functionarea in sarcina (conditiile amanuntite de incercare sunt precizate in standarde). Tensiunea de alimentare este apropiata de tensiunea de scurtcircuit, de valoare in general redusa si in consecinta si puterea sursei de alimentare este redusa.
La transformatoarele cu trei infasurari intervine particularitatea ca la scurtcircuitarea simultana a infasurarilor secundare, nu se mai stabilesc curenti practic proportionali cu cei nominali, ci de valori dependente de impedantele schemei echivalente din figura 24. De asemenea trebuie avut in vedere si faptul ca transformatoarele cu trei infasurari pot fi dimensionate pentru puteri egale pe toate infasurarile sau puteri diferite, astfel incat suma puterilor secundare este mai mare sau egala cu puterea primara.
In general, sarcina nominala la transformatoarele cu puteri egale pe infasurari se realizeaza pe perechi de infasurari si problema probei de incalzire s-a redus la cea a unui transformator cu doua infasurari.
La transformatoarele cu puteri diferite trebuie realizata
incarcarea simultana a infasurarilor. Acest lucru devine
posibil, prin introducerea unor impedante in serie cu
infasurarile secundare, astfel ca sa se obtina
valorile nominale ale curentilor simultan in toate trei
infasurarile, in figura 25 este indicata schema
echivalenta a transformatorului cu impedantele suplimentare ![]() ,
, ![]() . Cunoscand parametrii din schema echivalenta a
transformatorului, determinati din probele de scurtcircuit, se stabilesc
impedantele suplimentare astfel ca tensiunea U
si implicit puterea sursei de alimentare sa fie cat mai
mica. Exista posibilitatea ce trebuie analizata, ca una din infasurarile
secundare sa fie legata direct in scurtcircuit (una din
impedantele suplimentare nula).
. Cunoscand parametrii din schema echivalenta a
transformatorului, determinati din probele de scurtcircuit, se stabilesc
impedantele suplimentare astfel ca tensiunea U
si implicit puterea sursei de alimentare sa fie cat mai
mica. Exista posibilitatea ce trebuie analizata, ca una din infasurarile
secundare sa fie legata direct in scurtcircuit (una din
impedantele suplimentare nula).
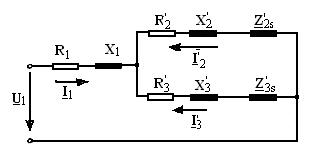
Fig. 25. Introducerea impedantelor suplimentare.
Daca suma puterilor aparente secundare este egala cu puterea aparenta a infasurarii primare (P2 + P3 = P1), curentii secundari rezulta sinfazici. Cum in schema echivalenta a transformatorului reactantele sunt de regula preponderente, rezulta ca practic este suficienta o reactanta suplimentara X' de valoare potrivita, conectata pe una din ramuri, ca sa se realizeze incarcarea simultana. Reactanta X' se plaseaza astfel incat tensiunea U1 sa rezulte cat mai mica.
In cazul general al infasurarilor incarcate simultan cu puteri aparente diferite astfel ca P2 + P3 > P, curentii sunt defazati si trebuiesc introduse impedante potrivite. In principiu, alimentarea se poate face pe oricare din cele trei infasurari, urmand ca pe celelalte sa fie introduse elementele de defazare necesare (rezistente, inductivitati sau capacitati). Locul alimentarii si dispunerea acestor elemente se stabileste astfel incat sa corespunda cat mai bine posibilitatilor platformei de incercare. Ca rezistente si reactante suplimentare se pot folosi masini sincrone, care permit largi posibilitati de reglaj.
Cursul 8
4.2. Transformatoare pentru modificarea numarului de faze
Schimbarea numarului de faze in retelele polifazate se poate realiza economic cu ajutorul transformatoarelor electrice.
a) Transformarea sistemului trifazat (m intr-un sistem bifazat (m = de tensiuni, conform schemei 'Scott', cu doua transformatoare monofazate M1, M2, are schema reprezentata in figura 26.
Transformatorul
M1 are raportul
de transformare W1/W2 iar celalalt, notat M2, are raportul de
transformare ![]() .
.
Transformatorul M1 se alimenteaza cu o tensiune de linie de la doua faze ale retelei (S, T), iar transformatorul M2 se alimenteaza de la faza a treia a retelei de alimentare (R) si de la o priza mediana a infasurarii primare a transformatorului M1.
In diagrama de fazoriala prezentata in figura se arata modul de transformare a unui sistem trifazat de tensiuni, intr-unul difazat, folosind schema Scott alaturata.

Fig. 26. Schema Scott de transformare a sistemului trifazat in bifazat
a - schema electrica; b - diagrame de tensiuni
b). Schimbarea numarului de faze de la m = 3 la m = 6
Pentru alimentarea instalatiilor de redresare hexafazate, se utilizeaza transformatoare care odata cu transformarea tensiunii si curentului schimba si numarul de faze de la trei la sase.
Transformatorul pentru schimbarea numarului de faze de la m = 3 la m = 6 are secundarul format din doua infasurari trifazate conectate in stea, tensiunile la bornele infasurarilor asezate pe aceeasi coloana fiind in opozitie de faza (figura 27).
c). Schimbarea numarului de faze de la m = 3 la m = 12
Transformatoarele care schimba sistemele trifazate in sisteme dodecafazate se utilizeaza la alimentarea instalatiilor de redresare. Schimbarea numarului de faze se realizeaza cu ajutorul a doua transformatoare dintre care unul are infasurarea primara conectata in stea iar celalalt in triunghi. Infasurarile secundare ale celor doua transformatoare sunt conectate in dubla stea si in acest caz se formeaza un sistem simetric dodecafazat (dodeca = 12).
Asemenea TE au larga aplicabilitate in sistemele de redresare, permitand obtinerea unei tensiuni redresata cu un factor de ondulatie diminuat fata de cazul utilizarii TE trifazate si corespunzator, dirijarea puterii absorbita din retea pe armonici superioare.
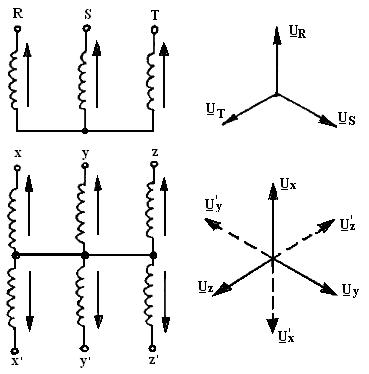
Fig. 2 Schema de conexiuni stea dubla stea pentru modificarea
numarului de faze de la m = 3 la m = 6.
4.3. Transformatoare electrice de masura
Prin utilizarea transformatoarelor de masura se urmareste ca pe de o parte sa se separe aparatele de masura si releele fata de partile puse sub tensiune inalta, iar pe de alta parte sa se reduca marimile ce trebuie masurate la valori pentru care sunt construite instrumentele uzuale. Puterile pentru care se construiesc transformatoarele de masura sunt cuprinse intre 5 si cateva sute de VA.
Transformatoarele de curent (TC) se utilizeaza pentru adaptarea curentilor intensi (pana la 6kA), care parcurg circuitele energetice (de forta) la posibilitatile aparatelor secundare (de masura, relee. etc.). Curentii nominali secundari sunt adesea 5A (uneori 2,5A sau 1A).
Aceste transformatoare au infasurarea primara inseriata cu circuitul al carui curent trebuie masurat, iar la bornele infasurarii secundare este conectat un consumator cu o impedanta mica (instrumentele pentru masurat curenti sau bobinele de curent ale releelor).
Aceste transformatoare au o singura infasurare primara (fig. 28) si l 4 infasurari secundare (una pentru masura, celelalte cu alt rol).
a. b. c. d.
Fig. 28. Transformator de curent
a - schema de principiu; b - tip suport; c - tip bara; d - tip cleste
TC avand circuitul magnetic de tip cleste se utilizeaza si pentru realizarea unor instrumente de masura de tip cleste (V-A; W; cosj). Mai recent se utilizeaza TC nesaturabile, cu mare viteza de raspuns, avand structura reprezentata in fig. 29.
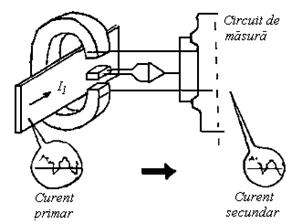
Fig. 29. Schema unui TC de tip special
Regimul normal de functionare al TC este in scurtcircuit. Se va evita functionarea in gol a TC.
Cand se lucreaza cu aceste transformatoare, trebuie sa se tina seama de faptul ca ampermetrele au impedante mici, motiv pentru care aceste transformatoare lucreaza intr-un regim apropiat de cel de scurtcircuit. Solicitarea magnetica a miezului este de 0,05 0,2T. Daca se deschide circuitul secundar, primarul ramanand conectat, miezul feromagnetic va fi magnetizat puternic de catre curentul primar, tensiunea la bornele secundare creste mult, putand duce la avaria transformatorului si in special pericliteaza securitatea manipulantului. Din acest motiv circuitul secundar, la aceste reductoare, nu se deschide niciodata sub sarcina. Transformatoarele obisnuite au un dispozitiv de scurtcircuitare cu care se scurtcircuiteaza mai intai bornele secundare si numai dupa aceea se deconecteaza aparatul de masura.
Transformatoarele de curent se impart in clase de precizie. Se deosebesc urmatoarele clase: 0,2; 0,5; 1; 3 si 10. Aceste numere reprezinta eroarea in din curentul nominal.
Transformatoarele de clasa 0,2 se utilizeaza in scopuri de laborator, cele de clasa 0,5 si 1 pentru masurari tehnice, iar pentru comanda releelor diferitelor aparate se utilizeaza transformatoare din clasele l si 3.
Transformatoarele de curent se construiesc pentru curenti secundari de l si 5A si tensiuni de lucru intre 0,5 si 400kV. Pentru tensiuni de 220 400kV, uneori se executa in cascada. Pentru tensiuni de pana pe la 3000V, obisnuit, se construiesc ca transformatoare uscate, iar pentru tensiuni mai mari, ca transformatoare in ulei.
Transformatoarele de tensiune (TT) sunt destinate reducerii tensiunilor mono sau trifazate la valori standard (100V sau 110V).
Infasurarea primara a acestor transformatoare este conectata la bornele intre care trebuie masurata tensiunea, iar la bornele infasurarii secundare este conectat instrumentul de masura a tensiunii, sau circuitele de tensiune ale releelor si aparatelor electrice. Sarcina secundara a unui transformator de tensiune are, practic, numai rezistenta electrica, inductivitatea fiind neglijabila.
Transformatoarele de tensiune au (pentru fiecare faza) o infasurare primara si una sau mai multe infasurari secundare. Circuitul magnetic poate fi cu coloane (fig. 30) in manta sau cu coloane in manta.
Transformatoarele de tensiune, ca si cele de curent, se grupeaza in clasele de precizie: 0,2; 0,5; 1 si 3. Transformatoarele de clasa 0,2 se utilizeaza in scopuri de laborator, iar celelalte in scopuri industriale.
Aceste transformatoare au un regim de functionare foarte apropiat de regimul de mers in gol, deoarece sunt utilizate numai in scopuri de masura si comanda. De aceea, puterile pentru care se construiesc sunt mici. Cele de clasa 0,5 au o putere cuprinsa intre 25VA si 150VA, cele de clasa l, de 1,6 ori mai mare, iar cele de clasa 3, de 4 ori. Aceste puteri, trecute pe placutele lor, sunt cele pentru care erorile de tensiune si unghi se gasesc intre limitele normale corespunzatoare claselor de precizie. Din punctul de vedere al incalzirii, transformatoarele de tensiune pot suporta timp indelungat sarcini de circa 8 ori mai mari.
Fig. 30. Transformator de tensiune:
a. schema de principiu - varianta monofazata; b. cu divizor capacitiv.
Solicitarile magnetice se aleg astfel ca reluctanta magnetica a miezului sa fie cat se poate mai mica. Se lucreaza de obicei cu o inductie de (0,7 0,8)T. Pierderile in fier trebuie sa fie cat se poate mai mici si, din aceasta cauza, miezul feromagnetic se executa din tole de cea mai buna calitate.
Se construiesc transformatoare monofazate si trifazate. Pentru tensiuni de 220 kV si mai mari, se utilizeaza transformatoare conectate in cascada. Pentru tensiuni de pana la 10kV, transformatoarele se executa sub forma de transformatoare uscate, iar pentru tensiuni mai mari, transformatoarele au infasurarile ingropate in diferite rasini sau se executa sub forma de transformatoare in ulei. Infasurarea secundara se dimensioneaza obisnuit pentru 100V. Adeseori se executa inca o priza pentru 110V, utilizata la alimentarea releelor.
In afara de transformatoarele speciale prezentate, sunt inca alte multe tipuri, ca: transformatoare pentru cuptoare electrometalurgice, transformatoare multiplicatoare de frecventa, transformatoare de faza, transformatoare pentru sudare prin presiune, cu arc electric si altele, care au la baza aceleasi principii ca si transformatoarele normale, dar constructia lor difera, corespunzand scopului pentru care sunt executate.
Regimul normal de functionare al TT este in gol. Fata de transformatoarele normale, la transformatoarele de masura se impune prin proiectare ca inductia de calcul sa fie sub 0.2T; evitandu-se astfel saturatia circuitului magnetic in cazul unor suprasolicitari.
Cursul 9
4.4. Transformatoarele rotitoare (TER)
Transformatoarele rotitoare au constructia asemanatoare cu a unei MAS cu rotorul bobinat.
Sunt prevazute cu cate doua infasurari atat in stator cat si in rotor. Infasurarile rotorice au capetele legate la patru perii (figura 31).
Infasurarile de pe aceeasi armatura sunt in cuadratura. Circuitul magnetic este realizat din tole de foarte buna calitate.
In regim stationar, alimentand cele doua infasurari statorice (S1-S2, S3-S4) cu tensiunile alternative (US1, US2) de aceeasi frecventa, t.e.m. induse in infasurarile rotorice (Uer1, Uer2) sunt:
![]()
![]()
k - raportul de transformare:
Fig. 31. Transformator rotativ
a - schema constructiva; b - schema de principiu
Daca se alimenteaza numai una din infasurarile statorice. TER se comporta ca un convertor unghi-tensiune de tip sinus sau cosinus. TER se utilizeaza in sistemele de urmarire si indicare.
4.5. Transformatorul traductor
Se utilizeaza pentru sesizarea deplasarilor mici, in doua variante: simplu si diferential.
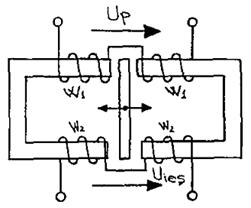
Fig.32. Traductorul de deplasare de tip transformator diferential
Pentru varianta diferentiala (fig. 32), tensiunea de iesire este data de expresia:

k - factor de cuplaj
4. Transformatoare de impulsuri (TEI)
Se utilizeaza pentru comanda ventilelor electronice (VE). Rolul esential al TEI este de a asigura separarea galvanica a circuitelor energetice ale convertoarelor electronice fata de sistemul de comanda.
TEI permit de asemenea, modificarea parametrilor impulsurilor de comanda furnizate de generatorul de impulsuri (GI).
Legarea infasurarii secundare a TEI cu grila VE (fig.33a) se face direct, printr-un rezistor (R) sau printr-o dioda (D1).
Introducerea rezistorului poate fi determinata fie de necesitatea reducerii amplitudinii impulsului de comanda, fie de necesitatea echilibrarii curentilor de comanda in cazul utilizarii unui singur TEI cu doua infasurari secundare, pentru comanda o doua VE. Prin utilizarea diodei se elimina posibilitatea aparitiei curentului invers, in circuitul de comanda, in cazul introducerii in secundarul TEI a unei tensiuni negative.
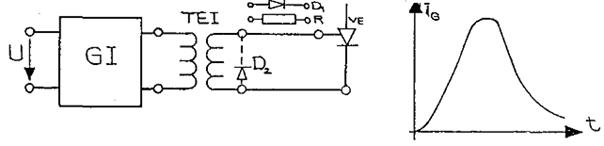
a. schema de legare in circuit b. forma impulsurilor
Fig. 33. Transformator de impulsuri
Legarea diodei (D2) in paralel cu infasurarea secundara a TEI poate conduce la reducerea duratei impulsurilor de comanda ca urmare a saturarii circuitului magnetic, motiv pentru care acest procedeu se evita, atunci cand reducerea duratei impulsurilor afecteaza siguranta comenzii.
Forma impulsurilor de comanda, in cazul utilizarii TEI, este reprezentata in figura 33.b. Raportul de transformare al TEI se alege, adesea, 1:1. Pentru realizarea circuitului magnetic se prefera materiale cu pierderi mici, la frecvente mari (ferite). Circuitul magnetic va fi supradimensionat (din punct de vedere al sectiunii), in scopul evitarii saturatiei. La stabilirea sectiunii conductoarelor se are in vedere valoarea efectiva a curentului in impulsuri prin conductoare.
4.8. Transformatoare pentru reglarea tensiunii
Transformatoarele electrice de distributie se executa cu prize, astfel ca pe langa tensiunea nominala este posibil sa se obtina inca doua tensiuni care difera de cea nominala cu 4%.
Prizele se pot scoate fie pe partea de inalta tensiune, fie pe cea de joasa tensiune. De cele mai multe ori, se executa pe partea de inalta tensiune. Astfel, un transformator cu tensiunea nominala de 6 kV poate functiona cu tensiunile de 5760V, 6000V si 6240 V.
La aceste transformatoare, schimbarea se face dupa ce transformatorul a fost deconectat.
Functionarea optima a retelelor, electrice extinse implica necesitatea de a putea modifica raportul de transformare in limite mai largi si fara a intrerupe alimentarea.
Reglarea tensiunii sub sarcina se poate face:
in trepte, prin intermediul periilor, metoda utilizata la transformatoarele puternice;
si in mod continuu, prin diferite mijloace, metoda aplicata la transformatoarele de putere mica, utilizate in special in scopuri de laborator.
Reglarea in trepte.
Transformatoarele mari, actuale, adeseori se executa astfel incat este posibila reglarea tensiunii in trepte pana la 20% din tensiunea nominala. Acest lucru se realizeaza cu ajutorul unei infasurari prevazute cu prize.
Infasurarea cu prize poate face corp comun cu infasurarea de lucru a transformatorului sau poate fi separata. In ultimul caz este necesar un transformator auxiliar TA (fig.34), conectat in serie cu transformatorul principal.
In practica sunt prezentate doua cazuri de transformatoare pentru reglarea tensiunii
- cu prizele scoase de la infasurarea principala; Reglarea tensiunii se face prin deplasarea unui cursor C la plotul potrivit;
- cu prize separate galvanic de infasurarea principala; se utilizeaza, de obicei, atunci cand tensiunea partii reglate este foarte mare.
O problema aparte o constituie operatia de trecere de la o priza la alta fara a intrerupe curentul electric de lucru. Pentru efectuarea acestei operatii, se utilizeaza doua cursoare C1 si C2. Operatia consta in ridicarea cursorului C1 de pe plotul prizei care a lucrat, plasarea lui pe plotul prizei care urmeaza sa lucreze si apoi repetarea aceleiasi manevre cu cursorul C2.

a. b. c. d.
a. infasurare principala cu prize;
b. infasurare suplimentara cu prize si transformator auxiliar;
c prin intermediul rezistentei; d - prin intermediul unui reactor
Fig. 34. Reglarea tensiunii in trepte a unui transformator
Exista un interval de timp in care cele doua cursoare C1 si C2 se gasesc pe ploturi diferite si deci o parte din infasurare este scurtcircuitata. Limitarea curentului prin partea respectiva de infasurare se face prin intermediul unui rezistor R sau al unei bobine L cu priza mediana, numita reactor, cum se vede in figura 34, c si d. In regim normal, rezistorul R din figura c este scurtcircuitat, iar cele doua jumatati ale bobinei L din figura d sunt parcurse de curenti egali si opusi, ceea ce face ca bobina sa intervina cu rezistenta infasurarii ei care este neglijabila.
Operatia de comutare de la o priza la alta se realizeaza:
fie cu contactoare, in care caz instalatia de comutare este exterioara transformatorului si utilizeaza de obicei un reactor;
fie cu un aparat special care are ca element limitator rezistorul, cand aparatul poate fi exterior transformatorului sau montat in aceeasi cuva.
Un aparat de comutare cu rezistor, foarte des utilizat, cu bune rezultate, este comutatorul Jansen.
La executarea practica a infasurarii cu prize de reglare, se urmareste sa se pastreze pe cat posibil simetria infasurarii.
Reglarea continua.
La un transformator dat, tensiunea cea mai mica care se poate obtine este cea a unei spire. S-au executat transformatoare la care tensiunea se variaza in trepte egale cu tensiunea unei spire.
In acest scop, infasurarea secundara se executa ca infasurare exterioara, intr-un singur strat, din cupru neizolat sau se dezizoleaza infasurarea dupa generatoare pe o anumita latime.
Pe partea dezizolata a infasurarii se rostogoleste o rola de carbune, care constituie una din bornele secundare, sau aluneca un cursor dintr-un material cu rezistivitate relativ ridicata. Prin pozitia rolei, respectiv a cursorului, fata de capatul activ al infasurarii, se stabileste tensiunea dorita.
Se poate realiza astfel o variatie a tensiunii incepand de la zero. Deoarece atat rola cat si cursorul realizeaza un scurtcircuit al spirelor pe care calca, pentru limitarea curentului de scurtcircuit, pe de o parte rola si cursorul se fac din materiale cu rezistivitate mai mare (carbune, etc.), iar pe de alta parte se limiteaza tensiunea pe spira la (0,5-1)V.
Prin aceasta metoda se realizeaza o variere a tensiunii, teoretic, tot in trepte, Deoarece tensiunea pe spira este mica, din punct de vedere practic, se poate considera ca are loc o variere continua. Se executa transformatoare si auto transformatoare mono si trifazate cu reglarea tensiunii dupa aceasta metoda pentru puteri de pana la 250 kVA si tensiunea secundara de la 0 la 220/280V. Se utilizeaza in special in scopuri de laborator.
O modificare, riquros continua a tensiunii se realizeaza cu transformatoare cu infasurare deplasabila.
Un astfel de transformator este cel cu primarul deplasabil.
Miezul transformatorului este de tip in manta.
Partea exterioara, mobila, constituie jugul transformatorului, in cavitatile caruia sunt plasate doua infasurari identice conectate in paralel. Ele constituie primarul.
Campul magnetic se inchide prin partea centrala, coloana, este fixa si in cavitatea ei este plasata infasurarea secundara.
Fluxul magnetic al infasurarii secundare depinde de pozitia ei fata de cele doua infasurari primare in paralel.
Pentru ca transformatorul sa aiba o comportare satisfacatoare, campul magnetic care se inchide intre coloana K si cele doua juguri trebuie sa fie repartizat uniform intre cele doua bobine primare si sa nu fie influentat de sarcina. De aceea, transformatorul se executa cu secundarul plasat in crestaturi, prevazute in coloana K, iar in cele doua juguri sunt crestaturi cu infasurari care au ca scop reducerea fluxului de dispersie. Pentru reducerea zgomotului inductia magnetica are valori reduse.
Deplasarea partii mobile, la transformatoarele mici, se face manual, iar la cele mai mari, prin roata dintata cu melc.
Racirea transformatoarelor mici se face cu aer, iar a celor mai mari, cu ulei.
Aceste transformatoare nu se construiesc pentru tensiuni mari. In vederea obtinerii tensiunilor ridicate, ele se cupleaza cu transformatoare obisnuite, fixe.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 6629
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved