| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
COLEGIUL TEHNIC "PETRU MAIOR" BUCURESTI
P R O I E C T
pentru examenul de obtinerea competentelor profesionale nivel 3
Specializarea : Tehnician mecatronist
Comunicatii seriale
ARGUMENT
Termenul "mecatronica" (MECAnica + elecTRONICA) a fost conceput in 1969 de un inginer al firmei japoneze Yaskawa Electric si protejat pana in 1982 ca marca a acestei firme. Se referea initial la complectarea structurilor mecanice din constructia aparatelor cu componente electronice. In prezent termenul defineste o stiinta inginereasca interdisciplinara, care, bazandu-se pe imbinarea armonioasa a elementelor din constructia de masini, electrotehnica si informatica, isi propune sa imbunatateasca performantele si functionalitatea sistemelor tehnice.
Evolutia sistemelor mecanice, electrice si mecatronice poate fi sintetizata astfel :
|
Sisteme pur mecanice |
pana in 1900 |
1788 - masina cu abur; 1872 - motorul Otto; 1887 - motorul Daimler; masina de calcul a lui Babbagge; masina de scris mecanica. |
|
1889 - motorul de c.a. | ||
|
Sisteme mecanice cu actionare electrica |
Masini unelte; Pompe. |
|
|
Amplificatoare Regulatoare | ||
|
Sisteme mecanice cu control automat |
anii1930 |
Avioane; Automobile; Turbine cu abur; Masina de scris electrica |
|
1955 - tiristorul 1959 - circuitul integrat 1971- microprocesorul | ||
|
Sisteme mecanice cu: Control electronic analogic; Control secvential; Control numeric. |
incepand cu anii 1950 pana la mijlocul anilor 1980 |
Lifturi cu control automat; Masini unelte cu comanda numerica; Roboti industriali; Periferice de calculator |
|
1981 PC-ul magistrale de proces noi senzori si actuatori integrarea componentelor | ||
|
Sisteme mecatronice Integrare mecanica & electronica&tehnica de calcul Software-ul determina functiile; Noi instrumente |
de la mijlocul anilor 1980 |
Roboti mobili; Linii flexibile; Controlul electronic al automobilului (ABS, ESP); Unitati CD-ROM |
Integrarea electronicii si a tehnicii de calcul a condus la simplificarea substantiala a componentelor mecanice si la sisteme mai ieftine. Parti mecanice au fost inlocuite cu componente electronice, mai ieftine, mai fiabile si mai usor de intretinut, intrucat pot facilita auto-diagnoza. Aceste sisteme sunt mai precise, intrucat precizia nu se bazeaza pe rigiditatea si stabilitatea mecanica, ci pe sisteme electronice de masurare si reglare. Simplificarea constructiei mecanice a fost facilitata si de comanda descentralizata, cu ajutorul microcalculatoarelor, a actionarilor electrice.
Dezvoltarea mecatronicii si a produselor si
tehnologiilor mecatronice reprezinta o etapa logica si concreta in evolutia
stiintei si tehnologiei, iar revelatia inginerului de
Una dintre componentele importante ale unui sistem mecatronic este calculatorul si reteaua de calculatoare.
Calculatoarele dintr-o retea folosesc ca mijloc de comunicatie un limbaj compus din simboluri (cifre) binare care reprezinta 1 sau 0. Calculatoarele combina simbolurile 1 si 0, formand octeti de date, iar apoi combinati de octeti, ceea ce oamenii inteleg prin cuvinte, respectiv propozitii. Prin aceste combinatii se comunica informatiile utile in retea. Scopul final al comunicatiilor intre calculatoare este de a transmite informatii oamenilor, masinilor. De asemenea, pentru a comunica, calculatoarele se folosesc de semnale electrice care reprezinta 1 si 0. Aceste semnale electrice pot fi digitale, folosite in special pentru reprezentarea interna a datelor, sau analogice, pentru a transmite datele de-a lungul retelei.
Modul de transmitere a datelor de catre calculatoare tine tot de partea comunicationala a retelei. Datele pot fi transmise in format paralel sau serial. "Comunicatia paralela inseamna ca se transmit simultan date pe mai multe linii sau cabluri. In schimb, transferul serial de date are loc pe un singur fir, bit cu bit. In mod normal, retelele folosesc comunicatii seriale pentru a transmite date de la un calculator la altul. Comunicatia seriala cere ca bit-ii de date sa fie aliniati unii dupa altii.
Comunicatii seriale
Comunicatiile seriale nu sunt nici mai rapide nici mai ieftine decat cele paralele, dar permit transferul de informatie intre echipamente aflate la distante foarte mari.
Pentru a permite mai multor producatori sa construiasca diverse masini care pot comunica intre ele, comunicatiile seriale s-au standardizat. Astfel, un producator de echipament, ce respecta standardele de comunicare seriala, ofera garantia ca echipamentul lui poate comunica cu orice alt dispozitiv construit in alcelasi strandart. Cele mai cunoscute standarde in acest sens sunt: RS-232, RS-422, RS-485.
Multa vreme portul serial al calculatorului a fost identificat cu interfata seriala reglementata de standardul RS-232C. In timp, pe langa interfata RS-232C s-au mai definit si alte interfete seriale care compenseaza neajunsurile acesteia in diferite aspecte. Acestea sunt USB, Access Bus, P1394.
Transferul serial se realizeaza pe baza unui set de reguli care alcatuiesc protocolul de comunicatie. Doua echipamente care comunica pe o magistrala seriala (canal serial) trebuie sa respecte acelasi protocol si aceeasi parametri de transmisie (ex : viteza de transfer, mod de sincronizare, lungimea blucului de date, etc.).
Avand la baza tehnologiile de comunicatie RS-xxx, s-au dezvoltat pentru industrie mai multe tehnologii de comunicatie, numite generic comunicatii fieldbus.
1.Transmisia seriala - date, semnale si temporizari
Transmisia digitala de date a evoluat de la conexiunea intre un calculator cu echipamentele periferice, la calculatoare care comunica in retele internationale complexe. Cu toate ca transferul paralel este mai rapid, majoritatea transmisiilor de date intre calculatoare sunt facute pe cale seriala pentru a reduce costul cablului si conectorilor. Exista si limitari fizice de distanta, care nu pot fi depasite de magistrale paralele. In comunicatia seriala, datele sunt transmise bit cu bit. Toate comunicatiile sunt caracterizate de trei elemente principale:
2. Sincronizare-frecventa si faza
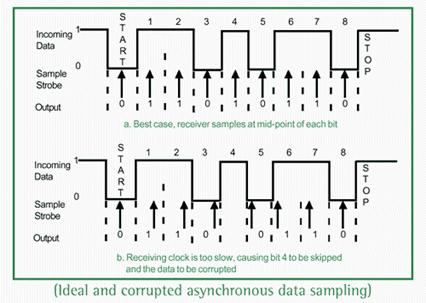
Este necesar un mecanism care sa permita receptorului sa citeasca corect bitul curent de intrare la jumatatea duratei lui. Receptorul trebuie sa stie durata unui bit si de unde incepe bitul respectiv, adica trebuie sa cunoasca frecventa si faza secventei de date. Daca emitatorul si receptorul au acelasi semnal de tact, sincronizarea este perfecta; emitatorul scrie bitul pe frontul crescator al tactului, iar receptorul citeste bitul pe frontul coborator al tactului. Problemele apar cand receptorul si emitatorul nu au un semnal de tact comun. Daca duratele celor doua semnale de tact, pentru emitator si receptor, nu sunt egale, apare o decalare, care dupa un anumit numar de biti rezulta intr-o eroare. Pentru a evita aceasta, receptorul trebuie resincronizat regulat la nivel de bit. Din alte motive, trebuie resincronizate si inceputul unui caracter, pachet sau mesaj. In figura de mai jos, in primul caz, fiecare bit este citit la mijlocul duratei lui, iar in cazul al doilea, bitul 4 se pierde deoarece tactul receptorului este prea incet.
Daca emitatorul si receptorul au acelasi semnal de tact atunci se spune ca lucreaza in mod sincron. Altfel, daca au semnale de tact separate, atunci lucreaza in mod asincron
In modul asincron, emitatorul nu trimite un tact deodata cu datele, ci insereaza un pseudo-impuls de tact, cunoscut ca Bit de Start, in fata fiecarui octet transmis. Astfel, pentru fiecare caracter ASCII avem o transmisie independenta, cu adaugarea bitilor de Start, Stop si Paritate. Viteza de lucru se stabileste manual la inceputul transmisiei. Pentru informatia de faza, receptorul trebuie sa detecteze inceputul bitului de Start. Pentru ca aceasta metoda sa functioneze, trebuie sa existe, o perioada de liniste intre caractere, realizata cu bitul de Stop.
In modul sincron, caracterele sunt transmise rapid, unul dupa altul, fara biti de Start si de Stop. Pentru sincronizare, mesajul transmis este precedat de caractere speciale de sincronizare, detectabile de circuistica receptorului. Acestea sunt transmise incontinuu si cand nu sunt date de transmis. Transmisiile in mod sincron pot folosi scheme de inteligente de modulare, care se bazeaza pe circuistica suplimentara, iar semnalele de date si tact folosesc aceeasi pereche de fire. Aceasta metoda, cunoscuta sub numle de codificare Manchester, este folosita in retele Ethernet.
O metoda sincrona alternativa este folosita pentru transmsii seriale rapide non-caracter, orientate pe bit. Protocoale care folosesc aceasta metoda permit transferul de date la viteze mari. Un astfel de protocol este si protocolul HLDC.
3. Standarde pentru comunicatiile seriale
Pentru a permite mai multor producatori sa construiasca diverse masini care pot comunica intre ele, comunicatiile seriale s-au standardizat. Astfel, un producator de echipament, ce respecta standardele de comunicare seriala, ofera garantia ca echipamentul lui poate comunica cu orice alt dispozitiv construit in alcelasi strandart. Cele mai cunoscute standarde in acest sens sunt: RS-232, RS-422, RS-485.
La nivel fizic , RS-232 foloseste 3 fire; unul de trasmisie, unul de receptie si unul pentru masa ( 0V) . Tensiunile sunt de 12 V pentru 1 logic.
La nivel fizic, RS-422 foloseste 4 fire, 2 pentru trasmisie si 2 pentru receptie .Este un sistem in bucla de current, 0-20mA.
La nivel fizic, RS-485 este un sistem in care se folosesc doua fire. Semnalul este trasmis in functie de diferenta de tensiuni intre cele doua fire., ca la telefon sau modem.
4. Codificarea datelor si controlul erorilor
Erorile pot apare cand circuistica folosita pentru conexiune este afectata de zgomot (interferente electrice) cum ar fi: lampi fluorescente, comutarea unor motoare mari, etc. Aceste varfuri sunt induse in firele de comunicatie care se comporta ca niste antene. Deoarece tensiunile cu care se lucreaza in calculatoare sunt mici, efectul pe care il are acest zgomot este important. Circuistica respectiva trebuie sa fie imuna la aceste zgomote
Canalele moderne de comunicatie sunt din ce in ce mai fiabile. Metodele de detectie si corectie a erorilor se indreapta spre domeniile CD-ROM-urilor si DVD-urilor. Toate aceste metode implica introducerea de informatie neesentiala, pe langa date utile, in transmisia datelor. Exista mai multe metode care merita sa fie studiate:
De exemplu, receptorul trimite inapoi o copie a datei primite. Acest mecanism injumatateste latimea de banda folosita. O alternativa ar fi ca emitatorul sa trimita data urmata de o copie a acesteia.
Toate metodele de tratare a erorilor folosesc informatie redundanta. De cele mai multe ori, aceste informatii sunt codificate inainte de transmisie.
Paritatea este cea mai discutata metoda de detectie a erorilor pentru protectia transmisiilor seriale de caractere ASCII. La oricare din metode, emitatorul prelucreaza o parte din date si genereaza un fel de semnatura pe care apoi o transmite impreuna cu date utile. Cand mesajul ajunge la receptor, acesta prelucreaza datele primite si genereaza o semnatura pe care o compara cu cea primita. Daca cele doua semnaturi nu coincid, atunci s-a produs o eroare. Metoda bitului de paritate se poate aplica pentru date binare de orice lungime. Pentru fiecare cuvant este adaugat un bit de paritate (semnatura). Paritatea poate fi para (cuvantul contine un numar par de 1) sau impara (cuvantul contine un numar impar de 1). Calcularea paritatii se poate face cu operatorul XOR (SAU Exclusiv) intre bitii cuvantului. Prin aceasta metoda este posibila doar detectia erorii singulare, cand sunt afectati un numar impar de biti. O eroare dubla (afecteaza un numar par de biti) nu poate fi detectata prin acest mecanism. Prin urmare, aceasta metoda nu ofera prea multa securitate. Un singur bit de paritate nu ofera informatii despre pozitia erorii.
Codurile Hamming reprezinta o alta metoda care permite si localizarea erorii prin adaugarea a mai mult de un bit de paritate dupa bitii utili. Este astfel posibila detectia si corectia erorii. Problema este 'unde sunt pozitionati bitii de paritate intre bitii utili ?' Raspuns: pentru bitii de paritate se aloca pozitiile care sunt puteri ale lui 2 in cuvantul dat. De exemplu, pentru 4 biti utili avem urmatoarea asezare:
unde D1, D2, D3, D4 sunt biti utili si P1,P2,P3, P4 sunt biti de paritate.
Acest mecanism permite corectia erorii singulare si detectia erorii duble.
Suma de control la nivel de bloc este alt mecanism de detectie a erorilor de transmisie. Prima data este necesar ca datele sa fie impartite in blocuri, care apoi se insumeaza si se obtine o suma care va fi trunchiata, inversata si adaugata la sfarsit. La receptie, blocurile primite, care includ si suma de la sfarsit, se aduna pe masura ce sosesc, si daca suma obtinuta nu este 0 atunci inseamna ca datele sunt eronate si secventa trebuie retransmisa. Nu este posibila corectia erorii. Pentru identificarea erorilor multiple si corectia lor, s-a dezvoltat mecanismul BCH.
O alta metoda de detectie a erorilor este CRC (Cyclic Redundant Check). Si in acest caz se calculeaza o suma de control, dar prin impartire aritmetica. Secventa de biti este impartita cu un numar special ales. Impartirea se face in modulo 2, adica folosind operatorul XOR. Restul impartirii reprezinta semnatura care va fi adaugata la sfarsit, dupa bitii utili. Divizorul se obtine cu algoritmul folosit la codurile Hamming. La receptie, se recalculeaza restul impartirii si daca nu coincide cu cel primit, atunci secventa este eronata.
Performantele acestei metode sunt impresionante. Un CRC care genereaza un rest de 16 biti poate detecta:
CRC-ul se poate calcula mai usor prin metode hardware, folosind registre cu deplasare si porti logice XOR.
5. Controlul fluxului de date - metode hardware si software
Controlul fluxului de date este necesar pentru a preveni erorile de depasire, cand receptorul nu poate prelucra datele care vin cu viteza prea mare. La inceput, datele sunt receptionate corect, dar nu pot fi prelucrate cu viteza cu care alte date sosesc si astfel se umple buffer-ul de receptie, rezultand o eroare de depasire. In acest caz, datele vechi din buffer vor fi inclocuite de date noi, inainte de a fi prelucrate. Pentru a evita aceasta eroare, receptorul trebuie sa poata sa-i ceara emitatorului sa opreasca transmisia pana cand sunt prelucrate toate datele din buffer-ul de receptie (golire). Aceasta facilitate se numeste controlul fluxului de date si este un element esential pentru toate legaturile de comunicatie.
Mecanismul poate fi implementat in mai multe moduri:
6. Aplicatii ale Standardului RS-232
La nivelul hardware cel mai de jos al unei comunicatii seriale, cel mai folosit este standardul RS-232. Acesta presupune un conector D cu 25 sau 9 pini, la care de cele mai multe ori sunt legate doar 3 fire. Un bit de 1 logic este transmis ca aproximativ -9 volti, iar un bit de 0 logic ca +9V.
In standardul RS232 datele se transmit in urmatorul format:
Modul in care un octet furnizat de catre utilizator este serializat si trimis pe linia TxD, respectiv receprecetionat pe linia RxD este invizibil utilizatorului. Aceste operatiuni sunt executate la nivel hardware de portul serial implementat cu circuitul UART 16550 (Receptie si Transmisie Universala in mod Asincron). Toate calculatoarele ofera porturi seriale pentru conectare de modem sau alte echipamente UART. Acest circuit face legatura intre magistrala de date paralela, din interiorul calculatorului, si linia seriala din exterior. Pe linga liniile de date si control, circuitul ofera si linii de semnalizare a erorilor de cadrare, depasire, paritate si semnale de intrerupere pentru a anunta procesorul de sosirea unei date. Porturile seriale pot fi configurate la nivel utilizator prin interfete grafice oferite de sistemul de operare, care permit stabilirea parametrilor unei comunicatii seriale: viteza de lucru, numarul de biti de date, tipul de paritate, modul de control al fluxului de date.
Cupla seriala cu 9 pini (partea de la calculator) are urmatoarea configuratie:

Acest tip de comunicatie este folosit pentru a transmite un semnal digital de la un calculator la un modem, care folosind mai departe alte standarde de comunicatie, transmite semnalul sub forma analogica, pe linia de telefon, spre un alt modem legat la alt calculator. Computerul se numeste DTE (Data Terminal Equipment), iar modem-ul DCE (Data Communications Equipment). In figura urmatoare este ilustrat rolul pe care-l are legatura RS232 in comunicatiile de date.
In aplicatiile industriale se utilizeaza numeroase dispozitive RS-232, iar actualmente devine tot mai important sa se lege toate aceste dispozitive 232 in retea, pentru automatizari si prelucrarea datelor. In general, dispozitivele RS-232 industriale sau comerciale sunt amplasate pe suprafete mari, departe de PC-ul gazda, fiind raspandite pe tot teritoriul intreprinderii. De aceea, nu este prea eficient sa se foloseasca placi seriale multiport pentru a interconecta toate aceste dispozitive RS-232. Produsele ICP DAS din seria I-752x pot fi folosite cu succes pentru a lega mai multe dispozitive RS-232 intr-o singura retea RS-485. Reteaua RS-485 se foloseste pe scara larga datorita usurintei de intretinere, cablarii simple, a stabilitatii, fiabilitatii si costului redus. Daca utilizatorul doreste sa conecteze dispozitivele RS-232 la reteaua 10BASE-T, atunci poate utiliza controlerele din familia I-7188EN.

7.USB - Universal Serial Bus


USB sau Magistrala Seriala Universala este un nou standard de comunicatie seriala de viteza mica, care are ca scop interfatarea mai usoara intre echipamente periferice si calculator, fara sa fie nevoie sa se instaleze cate o placa PCI pentru fiecare periferic nou, fara configurare manuala sau necesitatea restartarii sistemului. Latimea de banda a portului USB este de 1.5 Mo/s, impartita intre maxim 127 de dispozitive atasate. Cablul de comunicatie are 4 fire din care doua sunt de date si doua pentru alimentare (5V si 0V). Pentru a face mai usoara interconectarea intre echipamate, se folosesc conectori standard Master si Slave. Lungimea cablului este de maxim 5m. Acesta are la un capat conectori de tip A, pentru conectarea la calculator (master) si la celalalt conectori de tip B, petru conectare la periferic (slave).
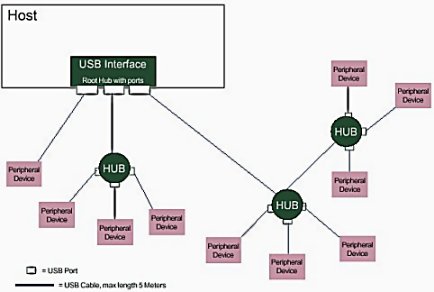
Standardul USB foloseste o conexiune de tip arbore in care sunt prezente urmatoarele elemente: USB Host (sau gazda), USB HUB (sau dispozitiv de rutare) si unitati functionale conectate (periferice). Host este in general calculatorul (radacina arborelui), la care se pot lega doua sau mai multe HUB-uri (doua HUB-uri pe port USB) sau direct periferice. La un HUB se pot conecta alte HUB-uri sau direct periferice.
USB foloseste un protocol master - slave. Hub-ul radacina adreseaza toate dispozitivele conectate, cu un cadru de sinconizare la fiecare milisecunda. Acesta constituie un cadru de comunicatie, in care dispozitivul Master poate trimite date la un Slave, sau poate cere date de la acesta. Exista 4 tipuri de cadre care pot fi folosite intr-o comunicatie: de control, izocrone, simple (neizocrone) si de intreruperi. Un cadru poate contine mai multe pachete de date de intrare sau iesire. Fiecare cadru incepe cu un pachet SOF (inceput de cadru). Pachetele de date pot contine pana la 64 octeti de informatie utila. Fiecare pachet incepe cu un octet de sincronizare si se termina cu un octet CRC pentru detectarea erorilor.
8.Modem-uri
Modemul este echipamentul care permite unui calculator sa comunice cu alte calculatoare prin intermediul liniilor telefonice analoage standard. Cuvantul provine din prescurtarea expresiei MOdulator/DEModulator.
Modemurile pot fi:
Ø interne sau
Ø externe.
Ele se pot conecta la PC in 3 moduri diferite:
Dupa functionalitate se cunosc doua tipuri de modemuri:
v 'winmodem'
v modem normal sau 'hardware'.
Winmodem-urile se potrivesc numai pentru configuratii ce utilizeaza sistemele de operare Microsoft Windows, iar cele hardware, fiind si mult mai scumpe, pot fi utilizate de aproape toate sistemele de operare existente. Modem-urile hardware, si cateodata si winmodem-urile, pot avea incorporat in ele si un controler hardware.
Modem-ul este folosit intr-o conexiune Dial-Up pentru a permite calculatoarelor sa comunice la distante mari prin intermediul retelei telefonice publice. Un modem tipic permite o viteza de comunicatie inte 300 si 56000 bps (bauds pe secunda).
Liniile telefonice lucreaza cu semnale analogice, cel putin la nivelul buclelor locale. Dar calculatoarele lucreaza cu semnale digitale. Apare deci o problema de conectare. Aici intervine modem-ul, care se conecteaza intre calculator si linia telefonica. Numele de modem provine din termenii modulare-demodulare. Modem-ul converteste nivelele logice de 0 si 1, prezente in calculator, in diferite tonuri. Frecventa tonurilor trebuie sa apartina spectrului vorbirii (300 - 3400 Hz) pentru a putea fi transmise pe liniile telefonice. Exista doua moduri de a face converisa. Un singur ton reprezinta 1 logic, iar nici un ton reprezinta 0 logic. Penru al doilea mod, 1 si 0 logic sunt reprezntate prin tonuri diferite (FSK). Pentru a permite comunicatia in amble directii simultan (full-duplex), se folosesc 4 tonuri diferite, cate doua pentru fiecare directie.
Modem-urile trebuie sa rezolve si urmatoarele probleme de interconectare: tensiunile folosite de un port serial RS-232 sunt de +/-9V, in timp ce linia telefonica foloseste tensiuni de 0/-50V; canalele telefonice de voce sunt limitate electronic sa lucreze la frecventa maxima de 4 KHz, iar un port serial lucreaza in general la 9.6 kbps, necesitand un canal de 19.2 KHz. Modem-ul trebuie sa faca conversia de la linia telefonica de 2 fire la linia seriala RS232 de 4 fire si sa implementeze un mecanism complex de detectie si corectie a erorilor. Pentru a imbunatati rata de transfer se folosesc mecanisme de compresie a datelor. Astfel, se pot obtine viteze de transfer de 56 kbps. Pentru modularea purtatoarei pe linia telefonica, modem-urile moderne folosesc tehnici complexe de modulare in amplitudine si faza.
9. Medii fizice pentru transmisia seriala
In mod uzual, mediul fizic de transmisie este bazat pe fire de cupru, acesta fiind si cazul standardului RS232 prezentat anterior. Comunicatiile seriale pot folosi si alte medii de transmisie, cum ar fi: fascicole de raze infrarosii sau laser in aer sau conduse prin fibra optica, ultrasunete, microunde sau radiofrecventa. In continuare sunt prezentate trei domenii in care comunicatia se face prin modularea luminii.
Telecomenzi in infrarosu
Telecomanda permite controlul de la distanta al unui dispozitiv, in cazul de fata aparate electronice de uz casnic (televizor, videorecorder, combina muzicala, climatizator, etc). Astazi, cele mai folosite sunt telecomenzile in infrarosu, care folosesc ca suport fizic pentru transmiterea datelor, un fascicol de raze infrarosii provenit de la o dioda LED care lucreaza in spectrul respectiv.
O astfel de telecomanda are un microcontroller care citeste o minitastatura si in functie de butonul apasat, emite un cod sub forma unui semnal digital pe o linie seriala. Semnalul moduleaza fascicolul infrarosu emis de LED.
Exista mai multe tipuri de codificare si modulare a fascicolului infrarosu. Una din cele mai folosite este codificarea RC5. Aceasta presupune transmiterea seriala a bitilor de cod cu urmatorul format pe 14 biti:

Bitii A0-A4 se numesc biti de adresa si selecteaza dispozitivul caruia ii este adresata comanda. Bitii C0-C5 se numesc biti de comanda si reprezinta comanda propriu-zisa la care trebuie sa reactioneze dispozitivul comandat.
ANEXE

Tipuri de modem-uri
Noul chip este compatibil si cu specificatiile xHCI (eXtensible Host Controller Interface) si prevede doua porturi USB, cu support LS (Low-Speed), FS (Full-Speed), HS (High-Speed) si SS (Super-Speed), iar system bus-ul este compatibil cu specificatiile PCIe Gen2.
 Telecomanda cu ecran tactil
Telecomanda cu ecran tactil
Bibliografie
https://eureka.cs.tuiasi.ro/~pandurluk/LAB06.pdf
https://mrbadnews.3x.ro/notiuni_introductive_serial.html
https://mediatice.ning.com/profiles/blogs/1265026:BlogPost:6191
https://ro.wikipedia.org/wiki/Modem
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2249
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved