| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Reglarea structural stabila a sistemelor liniare, sau reglarea robusta in abordare structurala, se constituie ca cel mai complex concept sistemic care apeleaza la proprietatile structurale si la procedurile de sinteza de stabilizare prin compensare si reglare. Acest concept este reclamat de realitatea practica de functionare ale structurilor de conducere automata. Conditiile de mediu, cum ar fi: umiditate temperatura si praf, fac modelul liniar pe stare al procesului, obtinut adesea prin liniarizarea procesului in jurul unui punct static de functionare, sa comporte modificari. Aceste modificari vizeaza mai mult valorile elementelor matricelor modelului structural si mai putin forma si dimensiunea modelului. Incertitudinile de modelare, de cele mai multe ori sunt legate de spectrul de frecvente ale semnalelor exogene genereaza celalalt concep de conducere robusta, robustetea in frecventa, care va face obiectul volumului doi al cursului de Teoria Sistemelor.
Reglarea robusta in abordare structurala genereaza problema reglarii structural stabile (PRSS) a carei rezolvare consta in sinteza unui compensator dinamic care sa asigure stabilitatea interna a bucle si satisfacerea conditiei de reglare la variatii, mai mari sau mai mici, ale parametrilor modelului structural. Rezolvarea problemei se face cu impunerea unor ipoteze de lucru care se constituie, in ultima instanta, in restrictii care deseori sunt infirmate de realitatea practica. Acesta este si principalul dezavantaj al structurilor de conducere structural stabile. Totusi, importanta conceptului sistemic este de necontestat pentru ca implicatii ale lui se regasesc in toate procedurile clasice de sinteza si proiectare a sistemelor automate. Avantajul major este reprezentat de faptul ca intreaga constructie este facuta pentru cazul sistemelor multivariabile, fara a necesita operatii apriorice de decuplare.
Procedura de sinteza a unui compensator, sau regulator, structural stabil face apel la proprietatile structurale ca instrumente indispensabile de analiza pe stare ale sistemelor. Sinteza compensatoarelor dinamice pentru stabilizare, de asemenea se regaseste in totalitate in procedura de constructie a regulatoarelor structural stabile. Structurile de conducere robuste care rezultata din proiectare au adesea dimensiuni mari, acesta fiind dezavantajul tuturor modalitatilor de abordare si rezolvare a problemelor de conducere robusta, structurala, frecventiala si adaptiva. Din pacate, structurile robuste rezultate ca solutii ale PRSS nu pot fi supuse unor proceduri de reducere a ordinului, deoarece regulatoarele structural stabile au anumite elemente fixe care nu pot fi modificate. In cazul celorlalte modalitati de abordare posibilitatile de reducere a ordinului modelului exista, ceea ce le confera o mai larga aplicabilitate.
In abordarea structurala, robustetea buclei de conducere capata un suport matematic riguros ce are repere precise de evaluare cantitativa si calitativa. Aceasta spre deosebire de robustetea in frecventa unde sunt mai abundente aprecierile de natura calitativa si aproximarile. La reglarea structural stabila, modelul procesului este perfect cunoscut si el nu sufera modificari din punctul de vedere al dinamicii. Singurele variatii sunt permise numai la parametrii modelului structural
Se va defini robustetea unei solutiei PRIS la variatii ale parametrilor modelului structural. Se va studia in ce masura se pastreaza proprietatile de stabilitate, (S), si de reglare, (R), create de o solutie PRIS, atunci cand parametrii procesului si ai compensatorului sufera abateri in jurul valorilor nominale.
Parametrii unei structuri de reglare sunt elementele
matricelor ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() precum si
precum si ![]() ,
,
![]() ,
,
![]() ,
,
![]() .
Figura 1. 1 ilustreaza structura buclei
de conducere.
.
Figura 1. 1 ilustreaza structura buclei
de conducere.
Figura 1. 1.
Se vor considera
fixe elementele matricelor ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() adica se va fixa clasa marimilor exogene si se va admite ca precizia traductoarelor
si a elementelor de comparatie este suficient de mare si neinfluentata de
conditiile de mediu. In
consecinta, vor fi luate in considerare numai variatiile parametrilor
procesului propriu-zis si ale compensatorului, adica variatiile elementelor matricelor
adica se va fixa clasa marimilor exogene si se va admite ca precizia traductoarelor
si a elementelor de comparatie este suficient de mare si neinfluentata de
conditiile de mediu. In
consecinta, vor fi luate in considerare numai variatiile parametrilor
procesului propriu-zis si ale compensatorului, adica variatiile elementelor matricelor ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,![]() .
.
Se
va nota cu a un punct parametric,
adica un punct ale carui coordonate sunt elemente ale matricelor ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() . Se considera P o proprietate ( P (a) ) in punctul parametric (de exemplu
proprietatea de stabilitate, (S), si de reglare, (R)).
. Se considera P o proprietate ( P (a) ) in punctul parametric (de exemplu
proprietatea de stabilitate, (S), si de reglare, (R)).
Definitia 1. 1.
(proprietate structural stabila). O
proprietate P (a) se numeste structural stabila in punctul
parametric a daca P (a') este adevarat
pentru ![]() ,
adica
,
adica ![]() apartine unei vecinatati sferice de raza
apartine unei vecinatati sferice de raza ![]() si centru a.
si centru a.
Definitia 1.
2.(proprietate generic structural stabila): O proprietate P (a) se spune ca este
generic structural stabila in punctul parametric a daca este adevarat
pentru ![]() a'
a' ![]()
![]() ,
,
![]() este
subspatiul generat de a; (dim
este
subspatiul generat de a; (dim![]() =dim
a).
=dim
a).
Datorita proprietatilor topologice ale planului complex,
proprietatea de stabilitate este structural stabila in punctul parametric a.
Deci daca matricea sistemului in circuit inchis, ![]() ,
are valorile proprii in regiunea de stabilitate (
,
are valorile proprii in regiunea de stabilitate (![]() in cazul neted,
in cazul neted, ![]() in cazul discret) atunci exista intotdeauna o
vecinatate a acestora astfel incat sistemul sa se mentina intern stabil
in cazul discret) atunci exista intotdeauna o
vecinatate a acestora astfel incat sistemul sa se mentina intern stabil
In ceea ce priveste proprietatea de reglare, aceasta este echivalenta cu existenta solutiei ecuatiilor reglarii, adica
(R) ( 1. 1)
( 1. 1)
Definitia 1. 3.
(structural stabilitate a proprietatii de reglare). (R) este structural stabila in punctul parametric a definit
de ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() daca exista o sfera (deschisa) a acestuia,
daca exista o sfera (deschisa) a acestuia, ![]() ,
astfel incat pentru
,
astfel incat pentru ![]() ecuatiile reglarii continua sa aiba o solutie V.
ecuatiile reglarii continua sa aiba o solutie V.
a) Ipoteza care expliciteaza persistenta exogenului de perturbatie si de referinta
 ( 2. 1)
( 2. 1)
Pentru dinamica generatorului de exogen
![]() ( 2. 2)
( 2. 2)
se considera ca matricea ![]() este fixa, adica exogenul apartine la o clasa
de semnale, sau este o combinatie de diverse clase de semnale.
este fixa, adica exogenul apartine la o clasa
de semnale, sau este o combinatie de diverse clase de semnale.
Exemplul 2. 1. Daca exogenul apartine clasei treptelor, atunci
![]() ( 2. 3)
( 2. 3)
daca apartine clasei rampelor
![]() ( 2. 4)
( 2. 4)
daca apartine clasei sinusoidelor de pulsatie ![]()
![]() ( 2. 5)
( 2. 5)
iar daca este o
combinatie din clasa rampelor si a sinusoidelor de pulsatie ![]() ,
atunci
,
atunci
 ( 2. 6)
( 2. 6)
Aceasta ipoteza este impusa de faptul ca prima ecuatie a reglarii
![]() ( 2. 7)
( 2. 7)
este ecuatie de tip Sylvester, care are solutie unica daca
![]() ( 2. 8)
( 2. 8)
Pentru inceput se considera
![]() (
2. 9)
(
2. 9)
cu ![]() satisfacand conditia ( 2. 1).
satisfacand conditia ( 2. 1).
b) Marimile
masurabile, ![]() ,
sunt independente si fixe, adica expresia marimilor masurabile
,
sunt independente si fixe, adica expresia marimilor masurabile
![]() ( 2. 10)
( 2. 10)
are matricea
![]() ( 2. 11)
( 2. 11)
fixa si epica (are liniile liniar independente).
c) Marimile
de calitate ![]() sunt independente si fixe, adica expresia
marimilor de calitate
sunt independente si fixe, adica expresia
marimilor de calitate
![]() ( 2. 12)
( 2. 12)
are matricea
![]() ( 2. 13)
( 2. 13)
fixa si epica (are liniile liniar independente). Ipoteza ca matricele C si D sa fie epice este echivalenta cu neredondanta marimilor de masura si de calitate. Ipoteza ca ele sa fie fixe este ca odata definite calitatile si masurile pentru proces ele raman aceleasi si pentru bucla de conducere.
Se va
incepe tratarea stabilitatii structurale a solutiei ecuatiilor reglarii in
punctul parametric a=![]() ,
deoarece matricea
,
deoarece matricea ![]() intervine liniar in termenul liber al
acestora. Se vor deduce elementele necesare pentru ca ecuatiile reglarii sa
aiba solutie pentru
intervine liniar in termenul liber al
acestora. Se vor deduce elementele necesare pentru ca ecuatiile reglarii sa
aiba solutie pentru ![]() oarecare. Aceasta libertate in alegerea lui
oarecare. Aceasta libertate in alegerea lui ![]() isi are corespondent in practica pentru ca
matricea semnifica locul si ponderea cu care intra in proces exogenul sub forma
de perturbatie. Deci posibilitatea ca exogenul de perturbatie sa intre pe
oriunde si cu orice pondere este viabila.
isi are corespondent in practica pentru ca
matricea semnifica locul si ponderea cu care intra in proces exogenul sub forma
de perturbatie. Deci posibilitatea ca exogenul de perturbatie sa intre pe
oriunde si cu orice pondere este viabila.
Tinand cont de ( 2. 7), ecuatiile reglarii
![]() ( 3. 1)
( 3. 1)
se pot scrie in forma detaliata
 ( 3. 2)
( 3. 2)
 (
3.3)
(
3.3)
unde se observa ca ![]() intervine liniar. Revenind acum
la forma compacta
intervine liniar. Revenind acum
la forma compacta
 ( 3. 4)
( 3. 4)
se constata ca
elementele matricelor ![]() si
si ![]() depind de parametrii A1, B1,
A3, Ac, Bc, Fc, Gc (restul
sunt ficsi), si ca sunt de forma unui sistem liniar
depind de parametrii A1, B1,
A3, Ac, Bc, Fc, Gc (restul
sunt ficsi), si ca sunt de forma unui sistem liniar
![]() (8 .3. 5)
(8 .3. 5)
Se presupune ca
pentru o matrice ![]() , ecuatiile reglarii au o solutie V. Facand A3
, ecuatiile reglarii au o solutie V. Facand A3![]() +
+![]() ,
cu
,
cu ![]() oarecare, atunci aceasta este echivalent
in ( 3. 5) cu
oarecare, atunci aceasta este echivalent
in ( 3. 5) cu ![]() .
.
Ecuatiile reglarii in variatii, scrise ca un sistem liniar,
![]() (
3. 6)
(
3. 6)
au solutie, daca ( 3. 5) are o solutie (aceasta de la PRIS ) si ecuatia
![]() ( 3. 7)
( 3. 7)
de asemenea, are o solutie, unde
 ( 3. 8)
( 3. 8)
Relatia ( 3. 7) se poate scrie in forma detaliata
 ( 3. 9)
( 3. 9)
Ecuatia 3. 9 trebuie sa aiba o solutie oricare ar fi ![]() .
Aceasta se intampla numai daca rangul matricei sistemului este egal cu rangul
matricei extinse cu vectorul termenilor liberi (teorema Kronecker Capelli)
.
Aceasta se intampla numai daca rangul matricei sistemului este egal cu rangul
matricei extinse cu vectorul termenilor liberi (teorema Kronecker Capelli)

Cum
![]() (
3. 11)
(
3. 11)
rezulta ca
![]() ( 3. 12)
( 3. 12)
si

Pentru ca
![]() ( 3. 13)
( 3. 13)
oricare ar fi tipul de estimator inclus in compensator, rezulta
![]() ( 3. 14)
( 3. 14)
De exemplu, in cazul unui compensator cu estimator unitar
 ( 3. 15)
( 3. 15)
Deoarece
![]() ( 3. 16)
( 3. 16)
rezulta ca bloc
linia![]() este liniar dependenta de bloc linia
este liniar dependenta de bloc linia ![]() .
Prin urmare, D1 fiind epica rezulta ca exista matricea
.
Prin urmare, D1 fiind epica rezulta ca exista matricea ![]() epica,
cu
epica,
cu![]() ,
astfel incat
,
astfel incat
![]() ( 3. 17)
( 3. 17)
Din relatia de mai sus se obtin egalitatile
![]() ( 3. 18)
( 3. 18)
si
![]() ( 3.
19)
( 3.
19)
Daca se noteaza cu
![]() ( 3. 20)
( 3. 20)
se obtine
![]() (
3. 21)
(
3. 21)
Din ecuatia matriciala
 ( 3. 22)
( 3. 22)
se poate deduce ecuatia
![]() ( 3. 23)
( 3. 23)
unde, daca se inmulteste pe stanga prima egalitate bloc linie, se obtine
 ( 3. 24)
( 3. 24)
Utilizand a doua
ecuatie a reglarii ![]() si
( 3. 19) rezulta
si
( 3. 19) rezulta
![]() ( 3. 25)
( 3. 25)
Relatiile ( 3. 21) si ( 3. 25) permit scrierea compacta
![]() ( 3.
26)
( 3.
26)
si explicitarea vectorului marimilor de calitate, z, in functie de vectorul marimilor masurabile, y,
![]() ( 3. 27)
( 3. 27)
Figura
3. 1.
Pentru ca matricea ![]() este epica rezulta ca matricea
este epica rezulta ca matricea ![]() este
epica. Se va numi S matrice de citibilitate, sau de deductibilitate.
este
epica. Se va numi S matrice de citibilitate, sau de deductibilitate.
In concluzie,
conditia necesara ca ecuatiile reglarii sa aiba solutie pentru ![]() este
ca sa exista matricea
este
ca sa exista matricea ![]() epica
astfel incat marimile de calitate, z, sa fie citibile (deductibile) din
marimile de masura, y. Figura 3. 1
ilustreaza citibilitatea.
epica
astfel incat marimile de calitate, z, sa fie citibile (deductibile) din
marimile de masura, y. Figura 3. 1
ilustreaza citibilitatea.
Daca matricea ![]() este epica, rezulta ca exista matricea
este epica, rezulta ca exista matricea ![]() astfel incat
astfel incat
 ( 4. 1)
( 4. 1)
este o matrice nesingulara, cu
 ( 4. 2)
( 4. 2)
Se aplica ca matrice de transformare spatiului de stare a compensatorului
![]() (
4. 3)
(
4. 3)
rezultand sistemul echivalent
 ( 4. 4)
( 4. 4)
![]()
![]()
![]()
 ( 4. 5)
( 4. 5)
![]() ( 4. 6)
( 4. 6)
Din egalitatea
![]() ( 4. 7)
( 4. 7)
rezulta
![]() ( 4.
8)
( 4.
8)
Relatiile ( 4. 4), ( 4. 5) si ( 4. 6) formeaza reprezentarea structurala echivalenta a compensatorului
 ( 4. 9)
( 4. 9)
 ( 4.
10)
( 4.
10)
 ( 4. 11)
( 4. 11)
Din ( 4. 11) se obtin ecuatiile compensatorului in forma detaliata:
![]() ( 4. 12)
( 4. 12)
![]() ( 4. 13)
( 4. 13)
 ( 4. 14)
( 4. 14)
Figura 4. 1. reda structura compensatorului astfel
incat ecuatiile reglarii sa aiba o solutie oricare ar fi ![]()
Figura 4. 1.
Rezulta o a doua
conditie necesara pentru ca ecuatiile reglarii sa aiba solutie in ![]() (cu
(cu ![]() oarecare),
compensatorul trebuie sa aiba o parte fixa cu dinamica
oarecare),
compensatorul trebuie sa aiba o parte fixa cu dinamica
![]() ( 4.
15)
( 4.
15)
care reprezinta o copie a exogenului multiplicata de q-ori (corespunzatoare fiecarui canal de calitate) comandata direct de marimea de calitate. Figura 4. 2 ilustreaza citibilitatea, structura modelului intern si comanda lui de catre marimea de calitate.
In cele ce urmeaza
se vor face cateva consideratii privind alegerea modelului intern, in situatia
generala cand exogenul este o clasa sau o combinatie de clase de semnale.
Astfel ce mai fidela reprezentare a exogenului este polinomul minimal al
matricei ![]()
![]() ( 4.
16)
( 4.
16)
unde ![]() ,
,
![]() sunt valorile proprii (polii) care dau
dinamica semnalelor exogene, iar
sunt valorile proprii (polii) care dau
dinamica semnalelor exogene, iar ![]() definesc
ordinile lor de multiplicitate
definesc
ordinile lor de multiplicitate
![]()
Figura
4. 2.
Daca se presupune ca
![]() ( 4. 17)
( 4. 17)
rezulta gradul polinomului minimal
![]() ( 4. 18)
( 4. 18)
Exemplul 4. 1. Spre exemplificare sunt date polinoamele minimale pentru cateva clase de semnale sau combinatii de clase:
a)
Treapta: ![]() ;
;
b)
Rampa: ![]() ;
;
c)
Sinusoida de pulsatie ![]() :
:
![]() ;
;
d)
Rampa si sinusoida de pulsatie ![]() :
:
![]() .
.
Se exprima polinomul minimal sub forma de suma de termeni de puteri
![]() (
4. 19)
(
4. 19)
pentru care se
alege o pereche (M, N), cu ![]() si
si ![]() ,
forma canonica controlabila
,
forma canonica controlabila
 ( 4. 20)
( 4. 20)
si perechea (Mo,
No), cu ![]() ,
,
![]()
 ,
,  , ( 4. 21)
, ( 4. 21)
unde se poate observa ca realizarea canonica controlabila a polinomului minimal este multiplicata de q-ori, corespunzatoare fiecarui canal de calitate.
Cu aceasta alegere dinamica modelului intern devine
![]() ( 4.
22)
( 4.
22)
cu ![]() ,
iar compensatorul va avea structura cu dimensiunile din figura 4. 3.
,
iar compensatorul va avea structura cu dimensiunile din figura 4. 3.

Figura 4. 3.
Ecuatiile de stare ale compensatorului au forma
 (
4. 23)
(
4. 23)
 ( 4. 24)
( 4. 24)
Pentru ca, datorita relatiei ( 3. 11), matricea
![]() ( 5. 1)
( 5. 1)
este nesingulara, atunci impreuna cu ( 3. 17) rezulta
Dar cum
 ( 5. 3)
( 5. 3)
si
 ( 5. 4)
( 5. 4)
rezulta ca
 ( 5. 5)
( 5. 5)
Prin urmare,
conditia necesara ca ecuatiile reglarii sa aiba solutie in ![]() ,
cu
,
cu ![]() oarecare, este ca
oarecare, este ca ![]() sa
nu fie un zerou de transmisie al tripletului (A1, B1, D1),
adica
sa
nu fie un zerou de transmisie al tripletului (A1, B1, D1),
adica
![]() ( 5. 6)
( 5. 6)
Definitia 5. 1. (zerou de transmisie). ![]() se spune ca este un zerou de
transmisie al tripletului (A1, B1, D1) daca
se spune ca este un zerou de
transmisie al tripletului (A1, B1, D1) daca
 ( 5. 7)
( 5. 7)
unde:![]() .
.
Se recapituleaza
acum conditiile necesare pentru ca o solutie PRIS sa fie generic structural
stabila in A3 (![]() oarecare
):
oarecare
):
a) citibilitatea vectorului marimilor de calitate din vectorul marimilor masurabile;
b) modelul intern. Compensatorul sa contina o copie a exogenului pe fiecare canal de calitate activata nemijlocit de vectorul marimilor de calitate;
c)
Valorile proprii,![]() ,
(modurile exogenului) sa nu fie zerouri de transmisie al tripletului (A1,
B1, D1)
,
(modurile exogenului) sa nu fie zerouri de transmisie al tripletului (A1,
B1, D1)
Figura 5. 1 prezinta structura buclei de conducere, unde se poate observa compensatorul format din doua parti: modelul intern si partea cu rol de stabilizare.
Fie o solutie PRIS structural stabila in A3, avand reprezentarea structurala
 ( 6. 1)
( 6. 1)
![]() ( 6. 2)
( 6. 2)
Pentru ca aceasta
structura sa fie si un compensator stabilizator este necesar ca perechea ![]() sa fie controlabila (stabilizabila) si
perechea
sa fie controlabila (stabilizabila) si
perechea ![]() sa fie observabila (detectabila).
sa fie observabila (detectabila).
Functia stabilizatoare a compensatorului poate fi explicitata daca sistemul in circuit inchis format din proces
 ( 6. 3)
( 6. 3)
si compensator
 ( 6.
3)
( 6.
3)
este intern stabil.
Cu alte cuvinte trebuie aratat ca vectorul de stare ![]() apartine unui compensator care are rol de a
stabiliza bucla formata din proces si modelul intern. Pentru aceasta se rescriu
in forma matriciala ecuatiile ( 6. 2) si ( 6. 3).
apartine unui compensator care are rol de a
stabiliza bucla formata din proces si modelul intern. Pentru aceasta se rescriu
in forma matriciala ecuatiile ( 6. 2) si ( 6. 3).
 ( 6.
4)
( 6.
4)
 ( 6.
5)
( 6.
5)
 ( 6.
6)
( 6.
6)
 ( 6. 7)
( 6. 7)
Se introduce
sistemul extins format din starile procesului, ![]() ,
si starile modelului intern,
,
si starile modelului intern, ![]() .
.
 (
6. 8)
(
6. 8)
care se poate rescrie compact in forma
 ( 6. 9)
( 6. 9)
![]() ( 6.
10)
( 6.
10)
![]() ( 6.
11)
( 6.
11)
Figura 6. 1 ilustreaza configuratia buclei cu sistemul extins si compensatorul stabilizator.
![]()
![]()
Cu ipoteza
citibilitatii (deductibilitatii) a calitatii din masura (adica daca exista ![]() epica astfel incat z=Sy), compensatorul (
epica astfel incat z=Sy), compensatorul (![]() ,
,
![]() ,
,
![]() ,
,
![]() )
este stabilizator pentru sistemul extins ( 6. 8) daca si numai daca
)
este stabilizator pentru sistemul extins ( 6. 8) daca si numai daca ![]() este un compensator stabilizator pentru
sistemul
este un compensator stabilizator pentru
sistemul ![]() .
.
Astfel:
(Ae, Be) controlabila,
rezulta ca exista Fe astfel incat ![]() (Ae+BeFe)=
(Ae+BeFe)=![]() ;
;
(Ae, Be) stabilizabila,
rezulta ca exista Fe astfel incat ![]() (Ae+BeFe)
(Ae+BeFe)![]() ;
;
(Ce, Ae) observabila,
rezulta ca exista Le astfel incat ![]() (Ae+LeCe)=
(Ae+LeCe)=![]() ;
;
(Ce, Ae) detectabila,
rezulta ca exista Le astfel incat ![]() (Ae+LeCe)
(Ae+LeCe)
![]() .
.
Teorema 6. 1. (pentru sistemul extins). Daca sunt indeplinite conditiile:
a) citibilitatea vectorului marimilor de calitate din vectorul marimilor masurabile;
b) modelul intern. Compensatorul sa contina o copie a exogenului pe fiecare canal de calitate activata nemijlocit de vectorul marimilor de calitate;
c) zerouri de transmisie; valorile proprii,![]() ,
(modurile exogenului) sa nu fie zerouri de transmisie al tripletului (A1,
B1, D1)
,
(modurile exogenului) sa nu fie zerouri de transmisie al tripletului (A1,
B1, D1)
atunci sistemul
extins cu reprezentarea structurala ![]() este controlabil (stabilizabil) si observabil
(detectabil).
este controlabil (stabilizabil) si observabil
(detectabil).
Demonstratie: Se presupune ca
perechea![]() ,
este controlabila (stabilizabila) si trebuie aratat ca perechea
,
este controlabila (stabilizabila) si trebuie aratat ca perechea ![]() este controlabila (stabilizabila). Se
utilizeaza criteriul Hautus pentru controlabilitate, respectiv
stabilizabilitate.
este controlabila (stabilizabila). Se
utilizeaza criteriul Hautus pentru controlabilitate, respectiv
stabilizabilitate.
Daca calculeaza
 ( 6. 12)
( 6. 12)
se obtin primele
doua alternative (pentru sisteme netede, respectiv pentru sisteme discrete)
daca perechea ![]() ,
este controlabila (stabilizabila). Ultima alternativa se obtine daca se tine
seama de ipoteza c din enuntul teoremei. Similar se face demonstratia pentru a
arata ca perechea
,
este controlabila (stabilizabila). Ultima alternativa se obtine daca se tine
seama de ipoteza c din enuntul teoremei. Similar se face demonstratia pentru a
arata ca perechea![]() este observabila (detectabila).
este observabila (detectabila).
Se pot formula conditiile necesare si suficiente ca o solutie PRIS sa fie structural stabila in punctul parametric
![]() ,
, ![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() ,
,
![]() ,
,
![]()
![]() ( 6. 13)
( 6. 13)
Teorema 6. 2. (de existenta solutie PRSS). O solutie PRIS este structural stabila generic in punctul parametric ( 6. 12) daca si numai daca:
1) (A1, B1) este controlabila (stabilizabila) si (C1, A1) este observabila (detectabila);
![]() 2) exista S
2) exista S![]()
![]() epica astfel incat z=Sy (citibilitatea);
epica astfel incat z=Sy (citibilitatea);
3) regulatorul incorporeaza un model intern (o copie a exogenului) pe fiecare canal de calitate, comandat direct de marimea de calitate;
4) Modurile (polii) exogenului, λ, nu sunt zerouri de transmisie ale tripletului (A1, B1, D1).
Demonstratie:
Necesitatea rezulta din dezvoltarile facute pana in acest punct.
Suficienta: Se face sistemul extins ( 6. 8). S-a aratat ca se poate sintetiza, pentru acest sistem un compensator stabilizator (Ace, Bce, Fce, Gce). Se fac identificarile
![]() ( 6. 14)
( 6. 14)
care introduse in (
6. 1) si ( 6. 2), compensatorul ![]() este un compensator stabilizator pentru
sistemul
este un compensator stabilizator pentru
sistemul ![]() .
.
Din conditiile 2 si 4 se obtine un sistem extins, daca modelul intern se introduce in compensator si sistemul initial este controlabil si observabil, atunci cele doua conditii se constituie in una care cere ca procesul initial sa fie controlabil si observabil si regulatorul sa
aiba copia exogenului pe fiecare canal de calitate.
Pentru compensatorul ( 6. 1), ( 6. 2) ecuatiile reglarii devin
 ( 6. 15)
( 6. 15)
Din citibilitate ultima bloc-linie este identica cu penultima. Suprimand ultima bloc linie se obtine scrierea compacta
![]() ( 6.
16)
( 6.
16)
cu solutia
![]() ( 6. 17)
( 6. 17)
Matricea
![]() este
nesingulara datorita faptului ca matricea
este
nesingulara datorita faptului ca matricea ![]() este stabila. Deci se poate afirma ca solutia
( 6. 17) a ecuatiei ( 6. 16) exista intotdeauna. Nesingularitata matricei se
mentine la
este stabila. Deci se poate afirma ca solutia
( 6. 17) a ecuatiei ( 6. 16) exista intotdeauna. Nesingularitata matricei se
mentine la ![]() variatii ale elementelor matricelor punctului
parametric ( 6. 13).
variatii ale elementelor matricelor punctului
parametric ( 6. 13).
In figura 6. 2 este data structura in circuit inchis cu compensator solutie PRSS.
Algoritmul de sinteza a compensatorului solutie a problemei reglarii robuste in abordare structurala PRSS)
Date: Proces: ![]() ;
;
Exogen: ![]() ;
;
Masuri: ![]() ;
;
Calitati: ![]() ;
;
(A1, B1) este controlabila (stabilizabila);
(C1, A1) este observabila (detectabila);
![]() epica;
epica;
![]() epica;
epica;
Pas 1: Test:
exista ![]() epica astfel incat D=SC ?
epica astfel incat D=SC ?
daca da: pas 2
daca nu: STOP "PRSS nu are solutie" calitatile nu sunt citibile din masuri.
Pas 2: Se calculeaza polinomul minimal al lui A2
![]()
![]()
Pas 3: Pentru ![]() λi,
i=
λi,
i=![]() test:
test:
Este
λi zerou de transmisie al tripletului ![]() ?
?
daca da: STOP, " PRSS nu are solutie "
daca nu: continua pentru urmatorul λi;
Pas 4: Se alege perechea (M, N), cu ![]() si
si ![]() ,
in forma canonica controlabila
,
in forma canonica controlabila
si perechea (Mo,
No), cu ![]() ,
,
![]()
,
Pas 5: Se formeaza sistemul extins
 ,
,  ,
,
Pas 6: Se sintetizeaza un compensator stabilizator pentru sistemul extins, cu structura:
![]() ,
, ![]() ;
;
Pas 7: Se formeaza compensatorul solutie PRSS:
 ,
,  ,
,
![]() ,
,
![]() ;
;
Pas 8: Se simuleaza sistemul in circuit inchis, cu modificarea punctelor parametrice (A3 oarecare si modificari cu ε celelalte matrice).
Exemplul 6. 1. Pentru procesul din figura 7. 2. 2, cu modelul din figura 7. 2. 3 (motorul de curent continuu, cu excitatie separata, comandat in tensiune prin circuitul rotoric) sa se determine compensatorul solutie PRSS, cu estimator unitar. Valorile constantelor care apar in model sunt acelea din (7. 2. 8). Ecuatiile si matricele modelului structural sunt
 ( 6. 17)
( 6. 17)
 ( 6. 18)
( 6. 18)
 ( 6. 19)
( 6. 19)
 ( 6. 20)
( 6. 20)
Urmeaza programul MATLAB de sinteza a compensatorului solutie PRSS, pentru semnal de referinta (referinta de turatie) rampa. Sunt date si cateva rezultate ale executiei lui, matricele sistemului extins si ale compensatorului. Compensatorul are dimensiunea sase. In figura 6. 3 se afla schema SIMULINK utilizata la simularea motorului in bucla, iar in figura 6. 4, rezultatele grafice ale simularii.
A1=[-20 -1000 ; 1 0 ];C1=[0 -1];B1=[1000 ; 0];D1=[0 -1];M=[0 1 ; 0 0 ];M0=M ;
N=[0 ; 1];N0=N ;Ae=[A1 [0 0 ; 0 0] ; N0*D1 M0];Be=[B1 ; [0 ; 0] ];
Ce=[C1 [0 0] ; [0 0 ; 0 0] eye(2)];R=ctrb(Ae,Be);R1=inv(R);
Coef=poly([-20 -20 -20+5j -20-5j]);xfimp=polyvalm(Coef,Ae);
Fet=-[0 0 0 1]*R1*xfimp ;eig(Ae+Be*Fet);Aet=Ae';Cet=Ce';
F0=[0 1 0 0; 1 1 1 0 ; 1 0 0 1];G0=[0 ; 1; 0];Aetprim=Aet+Cet* F0;Cetprim=Cet*G0;
Rp=CTRB(Aetprim,Cetprim);Rp1=inv(Rp);xlimp=polyvalm(Coef,Aetprim);
Le= - [0 0 0 1]*Rp1*xlimp;Let= F0+G0*Le;Le=Let';eig(Ae+Le*Ce);
Ace=Ae+Be*Fet+Le*Ce;Bce=-Le;Fce=Fet;Gce=[0 0 0 ];Ac1=Ace;Bc1=Bce (1:4 , 1:1);
Ac2=Bce(1:4 ,2:3);Fc1=Fce;Fc2=[0 0];Ac=[Ac1 Ac2;[0 0 0 0 ;0 0 0 0 ] M0];
Bc=[Bc1; N0];Fc=[Fc1 Fc2];Gc=0;A0=[A1+B1*Gc*C1 B1*Fc ; Bc*C1 Ac];
eig(A0);plot(t,y,'-k');

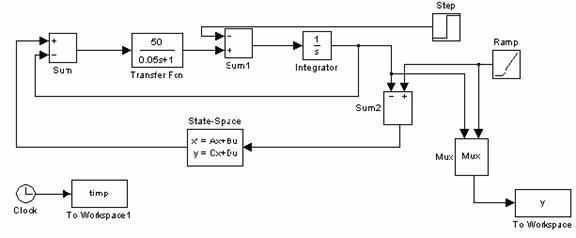
Figura 6. 3.
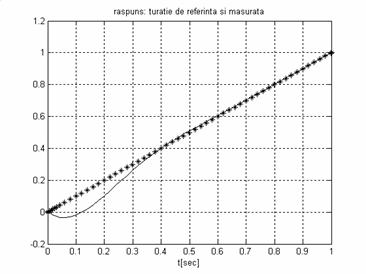
Figura 6. 4.
Exemplul 6. 2. Pentru procesul din figura 7. 2. 2, cu modelul din figura 7. 2. 3 (motorul de curent continuu, cu excitatie separata, comandat in tensiune prin circuitul rotoric) sa se determine compensatorul solutie PRSS, cu estimator minimal. Valorile constantelor care apar in model sunt acelea din (7. 2. 8).
Este dat programul MATLAB de sinteza a compensatorului solutie PRSS si reprezentarea structurala a acestuia. Compensatorul are dimensiune trei. S-a folosit aceeasi schema SIMULINK, iar rezultatele grafice sunt date in figura 6. 5.
a=[-20 -1000 0 0;1 0 0 0;0 0 0 1;0 -1 0 0]; b=[1000;0;0;0]; c=[0 -1 0 0;0 0 1 0;0 0 0 1]; d=[0 -1 1 0]; coef=poly([-20 -20 -20 -20]); r=ctrb(a,b); r1=inv(r); xda=polyvalm(coef,a); ft=-[0 0 0 1]*r1*xda; t=[1 0 1 0;c]; t1=inv(t); atil=t*a*t1; btil=t*b; ctil=c*t1; ftil=ft*t1; a1til=atil(1:1,1:1); a2til=atil(2:4,1:1); a3til=atil(1:1,2:4); a4til=atil(2:4,2:4); b1til=btil(1:1,:); b2til=btil(2:4,:); f1til=ftil(:,1:1); f2til=ftil(:,2:4); a1tilt=a1til'; a2tilt=a2til'; f01=[1;1;1]; g01=[1;1;1]; a1p=a1tilt+a2tilt*f01; a2p=a2tilt*g01; coef1=poly([-20]); rl=ctrb(a1p,a2p); rl1=inv(rl); xdal=polyvalm(coef1,a1p); lp=-[1]*rl1*xdal; lt=f01+g01*lp;
l=lt'; j=a1til+l*a2til; h=a3til+l*a4til-l*a2til*l-a1til*l; m=l*b2til+b1til; k=f1til;
n=f2til-f1til*l; ac=j+m*k; bc=h+m*n; fc=k; gc=n; ac1=ac; ac2=bc(1:1,2:3); bc1=bc(1:1,1:1); fc1=fc; fc2=gc(1:1,2:3); ac=[ac1 ac2;[0;0] [0 1;0 0]] bc=[bc1;[0;1]] fc=[fc1 fc2] gc=gc(1:1,1:1) plot(t,y,'-k');

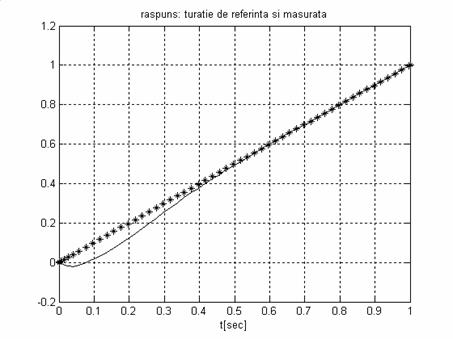
Figura 6. 5.
Observatia 6. 1. Nu pot suferi modificari elementele
modelului intern, perechea ![]() ,
respectiv matricea S, deoarece, in caz contrar ecuatiile reglarii ( 6. 15) nu
ar mai avea solutia ( 6. 17).
,
respectiv matricea S, deoarece, in caz contrar ecuatiile reglarii ( 6. 15) nu
ar mai avea solutia ( 6. 17).
Observatia 6. 2. Robustetea buclei de conducere este
echivalenta cu delimitarea vecinatatii punctului parametric![]() ,
, ![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() ,
,
![]() ,
,
![]()
![]() ,
in care
,
in care ![]() este stabila. Conditia de stabilitate este
asigurata in mod evident, iar conditia de reglare este indeplinita prin
nesingularitatea matricei
este stabila. Conditia de stabilitate este
asigurata in mod evident, iar conditia de reglare este indeplinita prin
nesingularitatea matricei ![]() . Matricea
. Matricea ![]() poate sa fie
oarecare, iar elementele celorlalte matrice pot capata variatii astfel incat
spectrul lui
poate sa fie
oarecare, iar elementele celorlalte matrice pot capata variatii astfel incat
spectrul lui ![]() sa se mentina in regiunea de stabilitate,
sa se mentina in regiunea de stabilitate, ![]() in cazul neted, respectiv
in cazul neted, respectiv ![]() in cazul discret.
in cazul discret.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1501
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved