| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
SCHEMA BLOC A STRUCTURII UNUI ROBOT
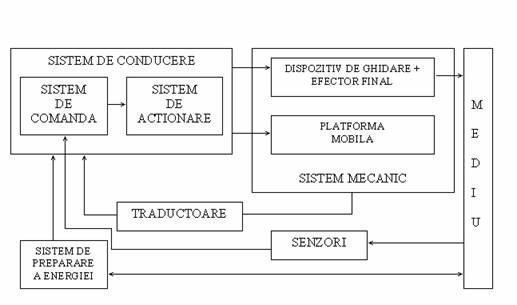
Figura 2.1 Schema bloc a structurii unui robot
Sistemul de comanda emite comenzi catre sistemul de actionare si prelucreaza in vederea acestui scop informatii provenind de la sistemul mecanic, de actionare si de la mediu, si are drept scop stabilirea succesiunii parametrilor, duratei miscarilor elementelor sistemului mecanic. El joaca rolul sistemului nervos al omului.
Sistemul de actionare are drept scop punerea in miscare a elementelor sistemului mecanic (a cuplelor cinematice). El joaca rolul sistemului muscular al omului.
Sistemul de actionare are rolul de a impune obiectului manipulat miscarea dorita. El joaca rolul sistemului osos al omului.
Sistemul de preparare al energiei asigura energie hidraulica, pneumatica sau electrica necesara sistemului de actionare. El joaca rolul aparatului digestiv, respirator si circulator al omului.
Traductoare si aparate de masura receptioneaza si furnizeaza sistemului de comanda informatii despre starea interna a elementului robotului: pozitii si miscari relative ale sistemului mecanic, parametrii functionali ai sistemului de actionare.
Senzorii receptioneaza si furnizeaza informatii sistemului de comanda despre starea externa a robotului: parametrii mediului si actiunea acestuia asupra robotului. Senzorii joaca rolul organelor de simt ale omului.
Prin "mediu" al robotului se intelege spatiul in care acesta evolueaza, cu obiectele continute si cu fenomenele care au loc in acest spatiu.
Sistemul mecanic are rolul de a impune obiectului manipulat miscarea dorita, dintr-un punct initial intr-un punct final (punct tinta), intr-o anumita orientare, functie numita "situatie".
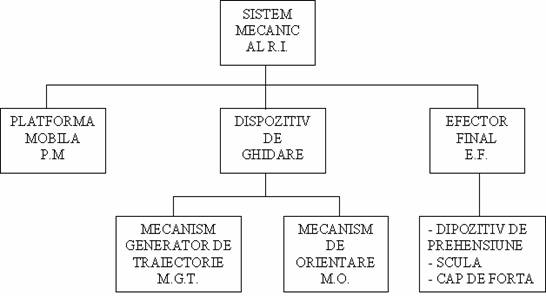
Sistemul mecanic al robotului este format dintr-o
serie de subsisteme, conform figurii 2.2.
Figura 2.2 Structura sistemului mecanic al unui robot
Dispozitivul de ghidare (D.G.) are functia de a conferii efectorului final miscarile si energia mecanica aferente acestor miscari in conformitate cu actiunea necesara a se efectua asupra mediului. Actiunea robotului asupra mediului poate fi de manipulare a unor obiecte, sau una de prelucrare a acestora.
Dispozitivul de ghidare este constituit la randul sau din doua elemente principale: mecanismul generator de traiectorie (M.G.T.) si mecanismul de orientare (M.O.).
Efectorul final (E.F.) are functia de a solidariza obiectul manipulat de un element al dispozitivului de ghidare asigurand acestuia o situare relativa bune determinata, mentinuta in timp. Efectorul final care manipuleaza obiecte se numeste dispozitiv de prehensiune.
Mecanismul generator de traiectorie (M.G.T.) se defineste ca spatial de lucru, locul geometric care contine multimea pozitiilor posibile ale punctului caracteristic. Spatiul de lucru este delimitat de puncte, linii sau suprafete.
Mecanismul de orientare joaca rolul articulatiei carpiene a omului. El realizeaza rotirea obiectului in jurul a trei axe perpendiculare concurente intr-un punct. Aceste miscari de rotatie, poarta numele generic de miscari de orientare in functie de axa in jurul careia se realizeaza.
Dispozitivul de prehensiune are rolul de a transmite si transforma miscarea unui element conducator - miscare conferita acestuia de elementul de actionare - la degetele care constituie elementele conduse ale mecanismului.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2771
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved