| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Tema de proiect
Sa se proiecteze un modul de:
Translatie , rotatie, orientare, efecrtor final din structura unui robot industrial avand urmatoarele caracteristici:
-Tipul structurii lantului cinematic al RI este TRT-RRR + EF
-Pozitia modulului in lantul cinematic al RI
-Tipul actionarii:hidraulic
-Transmisii mecanice utilizate: roti dintate cilindrice, roti dintate conice, angrenaj melc roata melcata, transmisie armonica, mecanism surub piulita
- masa obiectului de manipulat mob= 1+ n = 1+7 = 8 [kg]
- Viteza liniara de deplasare ve= (3 + n)*50 = (3 + 7)*50 = 500 [mm/s]
- Viteza unghiulara ω = (3 + n)*5 = (3 + 7)*5 = 50 [grd/s]=0.872[rad/s]
- viteza rapida vr ve = 1000 [mm/s]
- viteza unghiulara rapida ω r = 2* ω = 100 [grd/s]
- cursa liniara C = 200 + 5*n = 200 + 5*7 = 235 [mm]
- unghi de rotatie φ = 90 + 5*n = 90 + 5*7 = 125 [˚]
- presiunea uleiului pu= (100 + 5*n)*105 = (100 + 5*7)*105 = 135*105 [N/m*m]
- tensiunea de alimentare U = 380[V]
- coeficientul de frecare in ghidaje: η = 0.1
- nr de curse duble pe minut Ncd = 10 + n= 10+7=17 (cd/min)
n reprezinta numarul de ordine din catalog unde n=7
Ciclul de lucru al cuplei cinematice:
AR - avans rapid
RR - retragere rapida
Continutul proiectului
A. Partea scrisa
Structura generala a sistemului mecanic;
Algoritm de proiectare a sistemului mecanic;
Notiuni generale de robotica;
Tipuri de roboti industriali;
Proiectarea elementelor componente:
layout-uri ale robotului
ciclu de functionare
spatiul de lucru
analiza cinematica pozitionala
analiza cinetostatica la nivelul fiecarei cuple cinematice
calculul fortelor de fixare a obiectului
calculul fortelor de actionare a Efectorului Final
calculul fortelor generalizate la nivelul fiecarei cuple cinematice conducatoare
determinarea puterii motoarelor de actionare la nivelul cuplei cinematice conducatoare
calculul structurii de rezistenta a elementelor structurii mecanice
calcule cinematice (daca este cazul)
Descrierea si functionarea modululi proiectat.
Norme de tehnica securitatii muncii la exploatarea robotului
Intretinere si reparatii pentru asigurarea maintenantei
Bibliografie
Desen de ansamblu al modulului proiectat.
Desenul obiectului de manipulare.
Definitii din robotica
Robotica reprezinta stiinta si ramura ingineriei care se ocupa cu conceptia
constructia si aplicarea robotilor.
Robot reprezinta un dispozitiv mecanic cu comanda automata care indeplineste functii (operatii) cum ar fi manuirea sau locomotia.
Android reprezinta robot cu aspect uman
Robot mobil reprezinta robot instalat pe o platforma care se misca sub control automat
Robot pasitor reprezinta robot care realizeaza functii de locomotie asemanatoare animalelor sau omului
Definitii ale unor elemente componente din cadrul unui robot
Efectorul final este un dispozitiv atasat extremitatii distale a bratului robotului, cu care obiectele pot fi prinse sau supuse altor actiuni
Prehensor este un efector care ia, strange si depune obiectele
Definitii pentru miscare
Sistem de coordonate absolute reprezinta sistemul de coordonate fix in raport cu pamantul
Sistemul de coordonate absolute reprezinta sistemul care se poate deplasa in raport cu pamantul
Secusa reprezinta vibratia bratului robotului in timpul sau la sfarsitul miscarii
Definitii de comanda a robotului
Comanda prin invatare reprezinta comanda robotului ghidand efectorii sai de-a lungul unei secvente de pozitii dorite, inregistrand coordonatele avestor pozitii in memorie
Comanda adaptiva reprezinta sistemul de comanda ale carui programe sau parametrii de comanda se schimba automat ca raspuns la modificarea conditiilor in care sistemul opereaza
Comanda punct cu punct reprezinta comanda in care un punct de referinta se deplaseaza oprindu-se intr-o secventa de pozitii discrete.
Robotul este un sisitem constituit dintr-o serie de subsisteme cu diverse functii. Se intelege prin sistem un ansamblu de elemente componente si legaturile dintre acestea. Partile componente ale sistemului se numesc subsisteme. Compunerea sistemelor din subsisteme se evidentiaza prin scheme bloc.
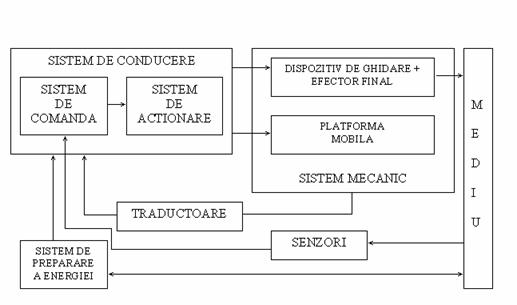
Figura 2.1 Schema bloc a structurii unui robot
Sistemul de comanda emite comenzi catre sistemul de actionare si prelucreaza in vederea acestui scop informatii provenind de la sistemul mecanic, de actionare si de la mediu, si are drept scop stabilirea succesiunii parametrilor, duratei miscarilor elementelor sistemului mecanic. El joaca rolul sistemului nervos al omului.
Sistemul de actionare are drept scop punerea in miscare a elementelor sistemului mecanic (a cuplelor cinematice). El joaca rolul sistemului muscular al omului.
Sistemul de actionare are rolul de a impune obiectului manipulat miscarea dorita. El joaca rolul sistemului osos al omului.
Sistemul de preparare al energiei asigura energie hidraulica, pneumatica sau electrica necesara sistemului de actionare. El joaca rolul aparatului digestiv, respirator si circulator al omului.
Traductoare si aparate de masura receptioneaza si furnizeaza sistemului de comanda informatii despre starea interna a elementului robotului: pozitii si miscari relative ale sistemului mecanic, parametrii functionali ai sistemului de actionare.
Senzorii receptioneaza si furnizeaza informatii sistemului de comanda despre starea externa a robotului: parametrii mediului si actiunea acestuia asupra robotului. Senzorii joaca rolul organelor de simt ale omului.
Prin "mediu" al robotului se intelege spatiul in care acesta evolueaza, cu obiectele continute si cu fenomenele care au loc in acest spatiu.
Sistemul mecanic are rolul de a impune obiectului manipulat miscarea dorita, dintr-un punct initial intr-un punct final (punct tinta), intr-o anumita orientare, functie numita "situatie".
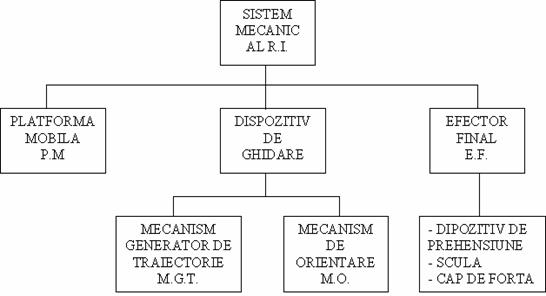
Sistemul mecanic al robotului este format dintr-o serie de subsisteme, conform
figurii 2.2.
Figura 2.2 Structura sistemului mecanic al unui robot
Dispozitivul de ghidare (D.G.) are functia de a conferii efectorului final miscarile si energia mecanica aferente acestor miscari in conformitate cu actiunea necesara a se efectua asupra mediului. Actiunea robotului asupra mediului poate fi de manipulare a unor obiecte, sau una de prelucrare a acestora.
Dispozitivul de ghidare este constituit la randul sau din doua elemente principale: mecanismul generator de traiectorie (M.G.T.) si mecanismul de orientare (M.O.).
Efectorul final (E.F.) are functia de a solidariza obiectul manipulat de un element al dispozitivului de ghidare asigurand acestuia o situare relativa bune determinata, mentinuta in timp. Efectorul final care manipuleaza obiecte se numeste dispozitiv de prehensiune.
Mecanismul generator de traiectorie (M.G.T.) se defineste ca spatial de lucru, locul geometric care contine multimea pozitiilor posibile ale punctului caracteristic. Spatiul de lucru este delimitat de puncte, linii sau suprafete.
Mecanismul de orientare joaca rolul articulatiei carpiene a omului. El realizeaza rotirea obiectului in jurul a trei axe perpendiculare concurente intr-un punct. Aceste miscari de rotatie, poarta numele generic de miscari de orientare in functie de axa in jurul careia se realizeaza.
Dispozitivul de prehensiune are rolul de a transmite si transforma miscarea unui element conducator - miscare conferita acestuia de elementul de actionare - la degetele care constituie elementele conduse ale mecanismului.
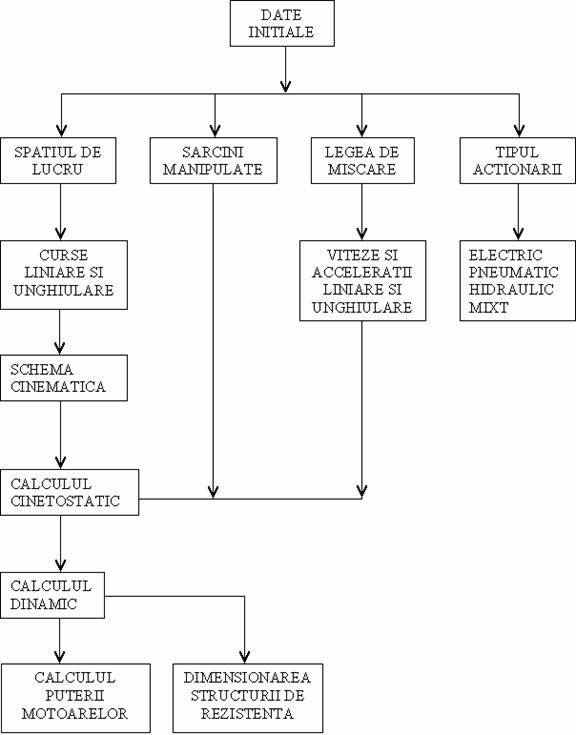
Figura 3.1 Algoritm de proiectare al unui Robot Industrial
PROIECTAREA ELEMENTELOR COMPONENTE
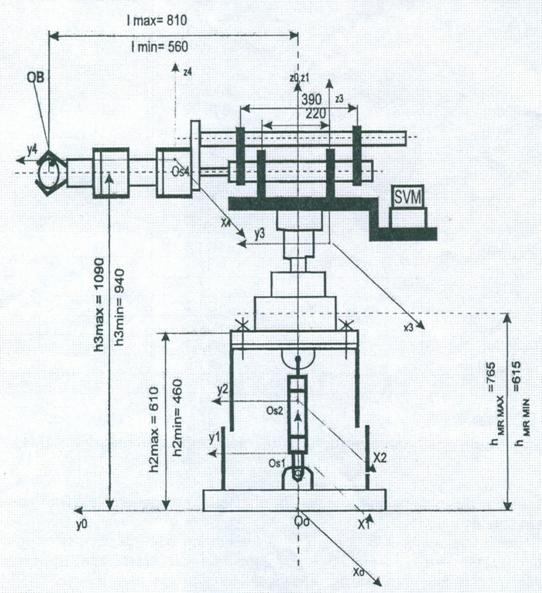
Structura cinematica a robotului pe care il vom analiza in continuare este prezentata in figura 5.1.
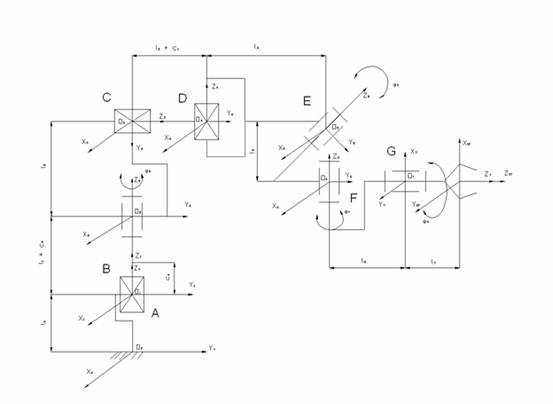
Figura 5.1 Structura cinematica a robotului
In structura robotului s-a introdus un modul de micromiscare. Acesta poate fi amplasat si inaintea Mecanismului de Orientare fara a modifica structura Dispozitivului de Ghidare, el realizand o translatie scurta. De regula modulul de micromiscare este amplasat in structura Efectorului Final (E.F.). La scrierea matricilor de trecere are aceeasi influenta.
Mecanismul robotului este de tip RRR cu axe neconcurente, de tip PUMA 560. Tipul structurii lantului cinematic al robotului industrial prezentat in figura 1.4 este TRT-RRR+E.F.
Din aceasta structura rezulta dimensiunile minime de la care se pornesc miscarile. Pentru dimensiunile maxime, individual se vor aduga cursele realizate.
In figura se prezinta planul de amplasament al robotului intr-o celula de fabricatie.
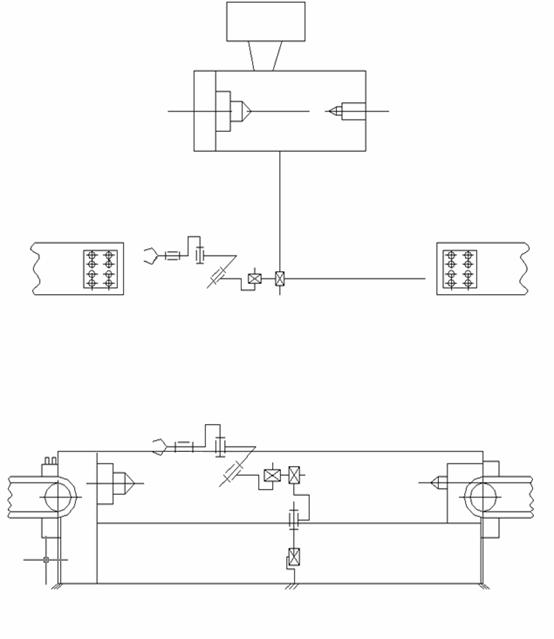
Figura 5.2 planul de amplasament
Pe baza planului de amplasament se stabileste ciclul de lucru al robotului, respective ordinea de functionare a cuplelor cinematice, ceea ce ne da programul tipic de lucru. Din acest program rezulta pozitiile cele mai defavorabile. In aceste pozitii defavorabile se determina forta generalizata la nivelul fiecarei cuple cinematice pe baza careia se determina puterea motoarelor de actionare in conditiile cele mai defavorabile.
Ciclul de lucru se determina pornind de la starea initiala a tuturor cuplelor cinematice considerandu-se in pozitiile cele mai apropiate de axa robotului.
Obiectele pot fi aduse in vederea manipularii fie pe palete fie individual, orientate cu axa orizontala sau verticala; la felsi evacuarea se poate realize in aceste sisteme.
L
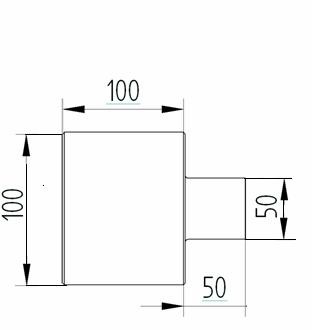
Indiferent de sistemul de transport
robotul prinde obiectul de diametrul minim. Asfel forma obiectului este
prezentata in figura 5.3
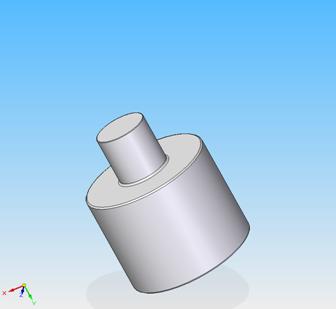
Figura 5.3 Piesa de manipulat
Pe baza planului de amplasament si lantul cinematic respective dimensiunile robotului se determina spatial de lucru figura 5.4.
Spatiul de lucru este utilizat pentru amplasarea periferiei robotului, adica dispozitivele aducatoare de obiecte, de scule sau dispozitive; astfel incat aceste obiecte trebuie sa ajunga in interiorul spatiului de lucru al robotului pentru a le putea apuca.
Masinile de lucru si instalatiile de evacuare.
In functie de tipul situarii alese la aducerea respective evacuarea obiectelor se stabileste ciclu de lucru pe secvente; notandu-se secventele de la 0 (pozitia initiala a Efectorului Final in ordinea efectuarii) pana la revenire in pozitia initiala.
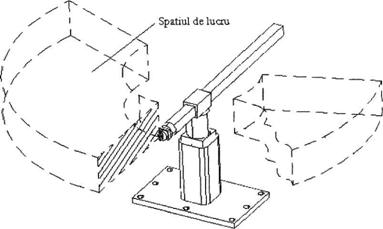
Figura 5.4 Spatiul de lucru
Pentru realizarea ciclului de functionare sunt actionate anumite cuple cinematice, respective efectorul final. Aceste miscari se realizeaza cu anumite viteze, acceleratii. Pe baza ciclului de functionare se intocmeste un tabel centralizator care cuprinde:
|
Nr. Crt. |
Secventa de lucru |
Explicata cupla-functionala |
Cursa [mm] |
Viteza mm/s] [grade/s] |
Timp[s] |
Acceleratia [m/s2] respectiv [rad/s2] |
|
Apropiere cupla C |
0.235 |
9.05 |
||||
|
Coborare cupla A |
0.235 |
9.05 |
||||
|
prindere SF-Ef | ||||||
|
ridicare cupla A |
0.235 |
9.05 |
||||
|
retragere cupla C |
0.235 |
9.05 |
||||
|
rotire cupla B |
1.79 |
0.27 |
||||
|
Apropiere cupla C |
0.235 |
9.05 |
||||
|
Rotire cupla G |
1.79 |
0.27 |
||||
|
Coborare cupla A |
|
0.235 |
9.05 |
|||
|
desprindere SF-ef | ||||||
|
retragere cupla c |
0.235 |
9.05 |
||||
|
apropiere cupla C |
0.235 |
9.05 |
||||
|
prindere SF-Ef | ||||||
|
retragere cupla c |
0.235 |
9.05 |
||||
|
rotire cupla B |
1.79 |
0.27 |
||||
|
Rotire cupla G |
1.79 |
0.27 |
||||
|
Coborare cupla A |
0.235 |
9.05 |
||||
|
Desprindere EF | ||||||
|
Retragere cupla C |
0.235 |
9.05 |
||||
|
Rotire cupla B |
1.79 |
0.27 |
||||
|
Ridicare cupla A |
0.235 |
9.05 |
Structura mecanica a R.I.
Calculul de dimensionare a obiectului manipulat si a EF
greutatea obiectului de manipulat:
m0=8 [Kg]
![]() =>
=>
![]()
![]()
![]() ;
; ![]()
![]()
![]()
![]() => L=85 mm
=> L=85 mm
![]()
![]()
Calculul efectorului final
Daca v=ct→![]()
![]() 0,235
s
0,235
s
v = 1000 [mm/s]=1 [m/s]
C=235[mm]=0.235[m]
![]()
a = ![]()
S=k(2Ff+Fi)
2Ff=Fi+G
Fi=mOB *a
Fi=8*4.255= 34.04[N]
G= mOB *g
G=8*9.8= 78.4
![]()
![]()
Ff=η*N
η=0,2
![]()
![]()
![]()
S=2*![]() *cos(α/2)=
393.54
*cos(α/2)=
393.54
![]()
![]()
Se considera o amplificare de 1,5 adica 150%=b
S*a=Fb*b
S=Fb*(b/a)
b/a=1,5
Fb=(b/a)/S
Fb=1,5/![]() =0.0019[N]
=0.0019[N]
b=1,5*a
b=1,5*83=124.5mm
tg(α-Δα)=Fu/Fb→Fu=Fb* tg(α-Δα)
Fb=(S*a)/b
Fu=![]() *(83/124.5)*
tg(90-15)* 10-5[N]
*(83/124.5)*
tg(90-15)* 10-5[N]
Fu=15.55*10-5[N]
![]()
![]()
K=1,3
k'=1,5
x=10mm
p=6,2*![]()
pu= (100 + 5*n)*105
![]()
![]()
D=70 mm
Dispozitivul de prehensiune:
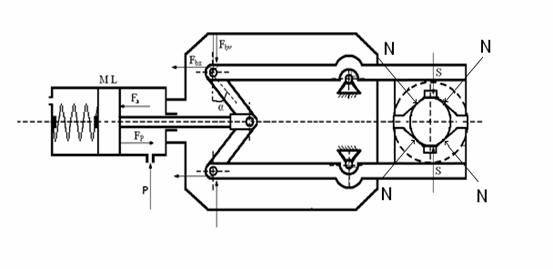
Se adopta
![]()
Forta S1 se proiecteaza pe directia de actionare → Q
S1=S*(a/b)= 787.08*(87.5/131.25)= 519.472[N]
β=45 º
tg45 º = Q/S1→Q=tg45 º *S1=1*519.472[N]=519.472[N]
Se neglijeaza fortele de frecare respectiv momentele de frecare din articulatii. Forta de strangere Q se realizeaza folosind forta hidraulica, destrangerea fiind mecanica realizata de catre arcul elicoidal.
- determinarea diametrului pistonului
![]()
k=1.3 reprezinta un coefficient de siguranta si compenseaza pierderile prin frecari
![]()
![]()

![]()
![]()
Calculul de dimensionare al robotului
Schema de calcul a modulului :
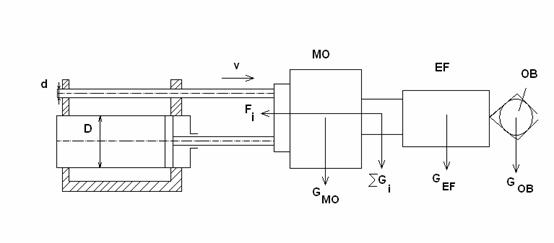
Fig. 5.5
Se considera masa efectorului final
calculul centrelor de masa
Calculul la nivelul fiecarei cuple
Cupla C
Cupla B
Cupla A
Schema de calcul:
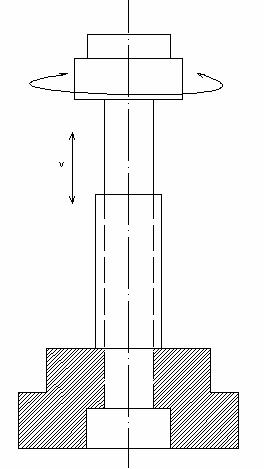
Fig. 5.6
Functionarea corecta a instalatiei este conditionata de intretinerea corecta a statiei de pompare si a circuitului de actionare.
Pentru aceasta se impun urmatoarele reguli de intretinere:
- mentinerea curateniei in instalatie prin asigurarea filtrarii lichidului si evitarea impurificarii sale prin diferite metode de contaminare;
- mentinerea reglajelor la parametrii stabiliti la punerea in functiune si a tuturor comenzilor electrice , blocajelor, care asigura functionarea optima a circuitelor;
- cunoasterea in detaliu a modului de functionare a instalatiei si a aparaturii cu care este dotata;
- mentinerea temperaturii uleiului la limitele prescrise;
- eliminarea oricaror pierderi de ulei;
- eliminarea aerului din instalatia hidraulica se obtine prin slabirea dopurilor de aerisire in timp ce instalatia functioneaza forta sarcina si daca este posibil cu debit redus;
- efectuarea reglajelor se incepe cu cele de presiune si apoi cu cel de debit, putere si temperatura;
Intretinerea in prima perioada de 50-100 ore de functionare are o deosebita importanta pentru durabilitatea instalatiei. Lucrarile de intretinere in aceasta perioada vizeaza in general probleme de fixare a conductelor si elementelor hidraulice de etansare, de incalzire exagerata, de zgomote anormale de functionare a sistemului de oprire in caz de avarie si de mentinere a reglajelor tehnologice efectuate initial.
La sfarsitul perioadei se verifica toate reglajele efectuate la pornirea instalatiei si se inlocuieste lichidul de lucru care se verifica in laborator, daca nu s-a produs contaminare exagerata cu particule metalice, provenite de la uzura prematura a unor piese in miscare.
Depasirea cantitatii de impuritati admise sau aparitia unor impuritati vizibile impune curatirea completa a instalatiei.
Acesta se face in felul urmator:
-se goleste rezervorul si instalatia de lucru de lichid contaminat;
-se spala circuitul cu ajutorul unei instalatii de spalare si apoi se sufla circuitele pentru indepartarea lichidului de spalare;
-se vor inlocui sau spala periodic filtrele;
-se remediaza scurgerile datorita stingerii insuficiente a suprafetelor de etansare si remedierea defectelor in urmatoarea ordine: demontare - curatare - diagnosticare - remediere - curatare - remontare - incercare.
Normele de tehnica securitatii muncii specifice functionarii instalatiilor hidraulice sunt determinate de sursele de pericol pe care-l reprezinta manipularea unor lichide de lucru sub presiune, fierbinti, inflamabile sau toxice precum si de celelalte surse cu caracter general, legate de functionare unor instalatii de alimentare cu energie electrica, cu piese in miscare de translatie sau rotatie.
Pentru prevenirea accidentelor datorate alunecarii pe pardoseala pe care s-ar curge lichid de lucru, se folosesc tevi pentru colectarea scurgerilor. In incaperile in care functioneaza sau se lucreaza la instalatii hidraulice se prevad pardoseli antiderapante. In cazul scurgerii unor lichide de lucru, pardoseala trebuie imediat curtata.
La efectuarea operatiilor de intretinere sau reparare este obligatorie oprirea instalatiei si deconectarea motorului de antrenare precum si depresurizarea instalatiei. Inainte de oprire organele de lucru vor fi aduse intr-o pozitie nepericuloasa.
Pentru a preveni accidentele provocate de piesele in miscare in mod obligatoriu se vor pune paratoare la indepartarea carora instalatia se opreste automat.
Toate locurile periculoase vor fi ingradite si marcate cu placi de avertizare.
BIBLIOGRAFIE
Constructia sistemului mechanic al robotilor industriali, Tripe V.A - Curs
Introducere in Robotica, Tarca R.C, Oradea 2003
Proiectarea sistemului mechanic al robotilor industriali, Tripe V.A - Curs
Segev A., Gebauer J., 2001, B2B Procurement and Marketplace Transformation, Journal of Information Technology and Management 2, 241-260
Glossary of terms, Harvard University https://cyber.law.harvard.edu/readinessguide/glossary.html#D
Amputja J., 2004, Introduction
to Logistics - Supply Chain Optimizers,
Bagnaru D., Cataneanu A., About the transversal displacements fields of a thin linear elastic plane plate; component element of a plane mechanism, SYROM 2001, Polytechnic University of Bucharest, Chair of the Theory of Mechanisms and Robots, 37-42 (2001).
Nowacki W., The
dynamics of the elastic systems, Technical Publishers,
Teodorescu P.P., Ilie V., Elasticity theory and introduction in deformable solid mechanic, Dacia Publishers, Cluj, 1976.
Internet:
www.kuka.com
www.puma.com
www.abb.com
www.okuma.com
www.robots.com
www.oki.com
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3091
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved