| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Mecanismul pe care dorim sa-l proiectam este un subansamblu al turbinelor Kaplan si Francis . Pentru intelegerea rolului functional al mecanismului trebuie sa intelegem bine fuctionarea turbinelor din care fac parte mecanismele.
Este necesar deci o consultare a bibliografiei indicate:
[8] ; [20] ; [21];[22] .
Elementele componente ale turbinelor mentionate rezulta din fig. 1,fig.1` si fig. 2.
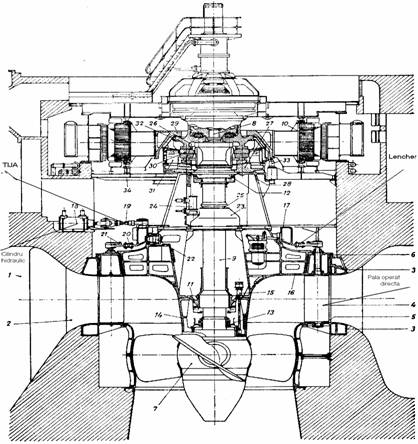
Fig. 1
Pentru caderile reduse, la care costul masinilor reprezinta un procent insemnat din cheltuielile de investitie, cresterea turatiei specifice are drept urmare reducerea pretului pe kW instalat. Din acest motiv, proiectantii de masini hidraulice si-au indreptat atentia inca din primele decenii ale secolului nosrtu catre turbine cu ns mare. Ca rezultat al studiilor si incercarilor efectuate, a aparut turbina elicoidala.
Profesorul ceh Kaplan, in urma
a numeroase experiente efectuate cu aceste turbine, ajunge la concluzia ca![]() performantele cele mai bune se obtin daca
unghiul de asezare al paletelor poate fi modificat in timpul functionarii.
performantele cele mai bune se obtin daca
unghiul de asezare al paletelor poate fi modificat in timpul functionarii.
Turbinele Kaplan se caracterizeaza prin:
-turatie specifica foarte mare (ns
-intrare si iesire axiala a curentului din rotor;
-spatiu mare si lipsit de palete intre aparatul director si rotor;
-numar redus de palete rotorice si disparitia inelului rotoric;
-palete rotorice profilate si mobile in jurul axei proprii;
-viteze mari ale apei la trecerea prin turbina.
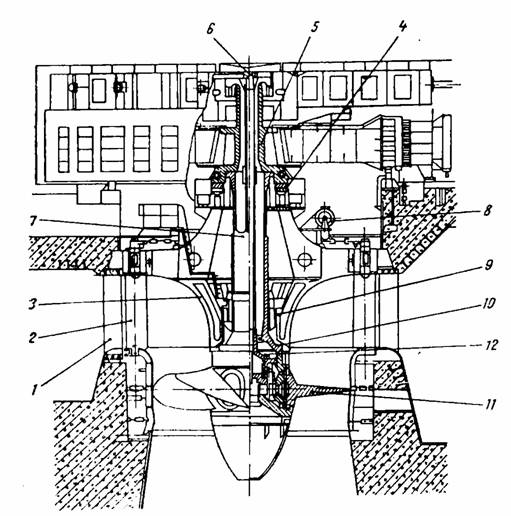
Kaplan. Din camera spirala de sectiune poligonala, curentul trece prin stator (1) si aparatul director (2) catre rotor. Pentru a impiedica accesul apei, in parte superioara s-a prevazut capacul turbinei (3). Arborele turbinei (7) este imbinat cu flanse de cel al generatorului (5), care se sprijina pe lagarul axial (4). La aceasta constructie corpul lagarului axial se sprijina direct pe capacul turbinei. La parte superiora a arborelui generatorului este dispusa constructia de admisie a uleiului (6) la servomotorul rotorului. Paletele directoare sunt puse in miscare de catre servomotoarele (8), prin intermediul mecanismului de manevra. Arborele turbinei (7) se invarteste in lagarul de ghidare (9). Flansa sa inferioara (10) constituie in acelasi timp si capacul servomotorului rotorului. Atat arborele generatorului cat si cel al turbinei trebuie sa fie tubulari, pentru a permite intoducerea coloanelor de alimentare cu ulei a servomotorului. Paletele rotorului (11) sunt miscate de catre pistonul diferential (12).
Rotorul turbinei Kaplan (figura 2') se compune din butuc si pale. Desfasurand o sectiune cilindrica concentrica prin rotor, se obtine reteau de profile hidrodinamice de la raza respectiva. Paleta este compusa din cateva profile aerohidrodinamice, racordate de asa maniera incat suprafata sa nu prezinte inflexiuni.
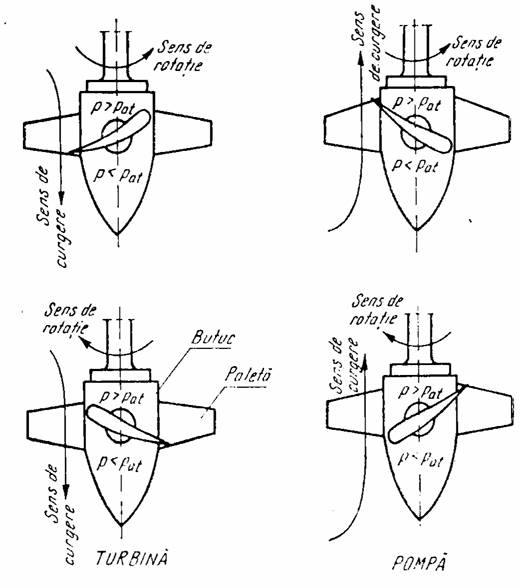
Profilele trebuie astfel dispuse incat intrarea apei sa se faca la bordul de atac, iar fata pe care se produce depresiunes sa fie orientata spre tubul de aspriratie. In figura 2' se prezinta comparativ asezarea paletelor la rotoarele de pompa si turbina.
I.SCHEMA CINEMATICA SCHEMA STRUCTURALA
ROL FUNCTIONAL
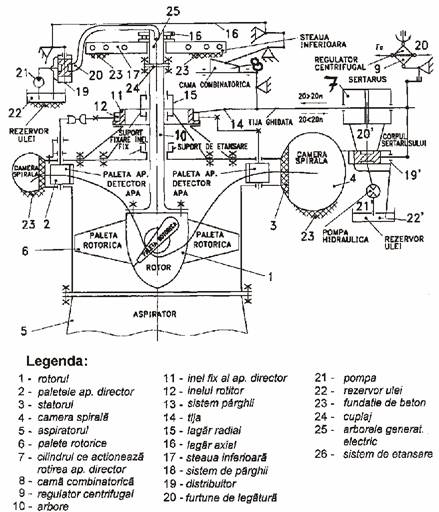
Am realizat acest indrumator de proiectare pe baza fig.5,fig6,fig7 si fig8,animat de ideea de a da studentilor un material pe baza caruia sa poata intelege cartea tehnica,aceasta oricare ar fi si in orice limba ar fi scrisa neputind fi inteleasa atita timp cit nu se intelege esenta,care este desenul de ansamblu ori de subansamblu din ea.
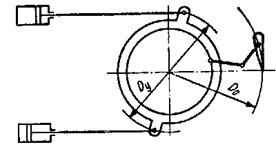

Fig.7
Fig.6
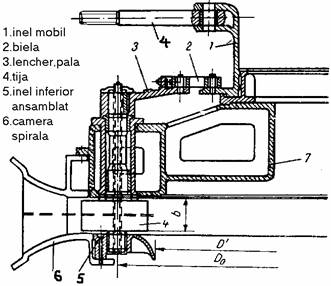
Fig.5
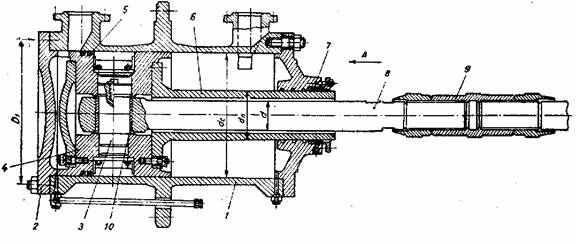
Fig.8
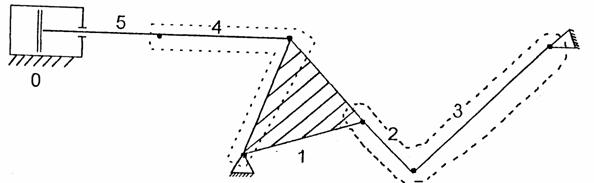
In baza acestor figuri am realizat schema cinematica din fig.3. a mecanismului propus spre proiectare.
Pe figura am pozitionat elementele cinematice active, (n=5).
Figura 3
ELEMENTE CINEMATICE ACTIVE ELEMENTE CINEMATICE PASIVE
Elementul 1 - inel; 0
Elementul 2 - biela; ZP
Elementul 3 - lenker; ZP
Elementul 3' - pala; ZP
Elementul 4 - tija; 1
Elementul 5 - piston; 1
Pe baza schemei cinematice din fig.3 am alcatuit schema structurala a mecanismului din fig.4.
Recomandam studentilor si revederea cursurilor de mecanica fluidelor si masini hidraulice, precum si a cursurilor de mecanisme, deoarece ne-am propus un indrumar succint axat pe proiectarea mecanismului.
Astfel pentru un numar de pale ales Zp vom avea la acest mecanism elementele passive mentionate mai sus.
Am extras din figura 4 prin linie punctata grupele structurale ale mecanismului.
Rezulta ca mecanismul aparatului director este format dintr-un mecanism de baza si doua diade.
Aparatul director are urmatoarele misiuni conduce apa spre periferiarotorului cu o viteza potrivita,ca marime si directie,pentru orice valoare a debitului;realizeaza alimentarea rotorului cu orice debit de la o valoare maxima oarecare pina la oprirea accesului apei.Constructia aleasa trebuie sa aiba urmatoarele proprietati: pierderi hidraulice minime; manevrare usoara,fara frecari mari sau uzura pronuntata.
Dintre numeroasele sisteme imaginate, cel care raspunde in conditii optime acestorcerinte si care este adoptat la toate constrructiile moderne de turbine Francis si Kaplan este compus (fig.5) din doua suprafete plane inelare ,intre care sint asezate , la distante egale, palete mobile in jurul unei axe proprii.Deplasarea simultana a paletelor este este asigurata de catre un inel de reglare si o serie de pirghii articulate (fig.6).
Miscarea este transmisa sistemului de reglare de catre unul sau doua servomotoare , puse in functiune de instalatia automata de reglare.Dupa cum se poate observa din schema cinematica (fig.7), mecanismul nu are miscare silita (mecanismul cu 5 verigi).Functionarea este posibila datorita faptului ca paleta se roteste cu un unghi mic (mai putin de 90 ).In timpul exploatarii exista posibilitatea ca intre paletele directoare sa se intepeneasca un corp solid, trnsportat de curentul fluid.Daca servomotorul comanda inchiderea paletelor, doua dintre ele nu se pot misca datorita corpului intepenit.Pentru a preveni avaria unui organ important ,fie biela 2 fie lenkerul 3 (fig.6) se executa cu un element de rupere usor de inlocuit. Cind asupra acestui element de rupere se exercita o forta cu 20.30% mai mare decit cea obisnuita,el va ceda, dind paletei in cauza posibilitatea de a ramine nemiscata, in timp ce toate celelalte se rotesc spre inchidere.
Aparatul director se proiecteaza astfel incit sa fie posibila deschiderea la un unghi mai mare decit cel corespunzator debitului normal, in general astfel incit sa poata fi absorbit debitul Qmax=1,25Qnormal In vederea obtinerii unor randamente maxime, corpul paletei trebuie sa opuna rezistente minime la trecerea curentului ,deci se va profila hidrodinamic.Grosimea profilului trebuie sa fie suficient de mare, pentru a rezista la presiunea apei in pozitia complet inchisa. Unghiul a ,pe care il face ultimul element al paletei directoare (la deschiderea normala) cu tangenta la cercul paralel ce trece prin bordul ei de fuga, trebuie sa fie tocmai unghiul a din triunghiul vitezelor de la intrare in rotor ,pentru ca sa nu apara devieri bruste ale curentului la intrarea in rotor (soc la intrare).Conditia nu poate fi intocmai indeplinita ,decit in cazul muchiilor de intrare in rotor verticale.
Acest mecanism are rolul functional de mentinere constanta a turatiei turbinelor, pentru ca generatoarele electrice pe care le actioneaza sa-si mentina constanta frecventa de 50 Hz.
Amintesc aici ecuatia de miscare a masinilor:
 (1) [2];[20];[23]
(1) [2];[20];[23]
Din relatia (1) rezulta ca atunci cand momentul rezistent Mr se modifica datorita bransari ori debransari consumatorilor de energie electrica este necesar sa modificam in mod corespunzator si momentul motor Mm pentru o mentinere cvasiconstana a turatiei respectiv a vitezei unghiulare w, astfel incat in permanenta sa avem Mm=Mr
Momentul de inertie mecanic I al agregatului este dat de relatia I SIi, unde 'n' este numarul de piese aflate in miscarea de rotatie cu viteza w : rotor turbina, rotor generator, arbore turbina, arbore generator, cuplaj, etc. Din (1) rezulta ca este bine ca I sa fie mare pentru ca variatia lui w sa fie mica, deci frecventa ν a curentului sa se mentina practic la valoarea de 50 Hz.
Momentul motor este creat de variatia momentului cinetic al apei turbinate fata de axa de rotatie a rotorului in conformitate cu teorema momentului cinetic:
![]()
[14]
![]()
![]()
![]()
![]()
![]() Cunosand ca momentul cinetic
al particulei de masa m, de viteza V, este K r x
mV si
consideand apa turbinata formata din o infinitate de particule, rezulta din (2)
relatia:
Cunosand ca momentul cinetic
al particulei de masa m, de viteza V, este K r x
mV si
consideand apa turbinata formata din o infinitate de particule, rezulta din (2)
relatia:
![]()
![]()
![]()
![]()
![]()
Mm=r∙Q(r x V r x V
![]()
![]() Pentru ca turbina data prin constructie r || V , deci:
Pentru ca turbina data prin constructie r || V , deci:
![]()
![]()
![]() Mm r∙Q∙r x V (4)
Mm r∙Q∙r x V (4)
In relatia (4) singura marime ce se poate modifica este debitul Q.
Rolul de modificare a debitului Q pentru a mentine constanta turatia n (respectiv ω) revine aparatului director, care variaza debitul prin variatia sectiunii de trecere a apei printre palele aparatului director, in baza relatiei de continuitate:
Q=S∙V (5)
(unde S este sectiunea de trecere a apei)
Debitul de apa Q trebuie sa cada uniform pe toata periferia rotorului. Camera spirala a turbinei are acest rol de distributie uniforma a debitului pe toata periferia rotorului. Din camera spirala prin palele statorice, apa ajunge la palele mobile ale aparatului director.
Din necesitatea unui debit uniform pe periferia rotorului, rezulta necesitatea rotirii palelor in jurul axelor proprii in mod simultan si in acelasi unghi, pentru ca toate spatiile dintre pale sa fie egale intre ele.
Cele spuse mai sus conduc la schema cinematica a mecanismului din figura 3.
Rotirea simultana este asigurata de inelul mobil '1' pe care sunt montate articulat un numar de Zp=1636 de biele '2' identice.
Pe un cerc de diametru Don sunt montate un numar identice de pale (Zp=1636); (tabelul 1-2);[20]
Legatura dintre axul palelor si biela '2' se face prin intermediul pieselor '3' ,montate prin pana pe axul palelor si articulat de biele. Prin urmare pala '3' si lenkerul formeaza un singur element cinematic. Pentru determinarea mobilitatii trebuie sa eliminam cuplele cinematice pasive. Toate elementele fiind in plan, mecanismul este de familia f=3.
Din schema rezulta ca nu avem cuple cinematice de clasa IV, 'C ' ci numai numai cuple cinematice de clasa 5. Acestea sunt in numar de sapte: de translatie intre piston si elementul de baza (cilindru fix) si celelate de rotatie in numar de sase si anume: (3;0) ; (2;3) ; (1;2) ; (1;0) ; (4;1) ; (4;5).Acestea sint cuplele active. Deci mobilitatea mecanismului este :
M=3n-2C (6) [1] ; [2];[3]
unde 'n' este numarul de elemente cinematice active
Avand M=1, rezulta ca pentru o pozitie data a elementului motor (piston), toate celelalte elemente cinematice ale mecanismului vor avea pozitii bine determinate ce rezulta din cinematica mecanismului.
Relatia (6) s-a scris dupa ce am eliminat din mecanism elementele pasive si cuplele cinematic pasive,aferente elementelor pasive.
II DATE DE PROIECTAREA MECANISMULUI
In vederea proiectarii mecanismului se dau prin tema de proiectare urmatoarele date: [7]; [8]
-Caderea turbinei H; [m]
-Presiunea din hidromotor pc N/m2]
-Puterea turbinei P; MW
-Debitul dublu unitar Q ; m3/s
-Turatia dublu unitara n ; rot/min
-Randamentul modeluluii M
-Dimensiunile de gabarit ale modelului turbinei, (fig.4); [7]
P= ηρgQH (7) [21] ; [7] ;[20]
In relatia (7) ρ
este densitatea apei ρ=103
Kg/m3 iar ![]() acceleratia gravitationala g=9,81 m/s2. Debitul turbinei este dat de relatia :
acceleratia gravitationala g=9,81 m/s2. Debitul turbinei este dat de relatia :
![]() (8);[8];[20]
(8);[8];[20]
unde D este diametrul rotorului turbinei.
Din relatiile (7) si (8) rezulta:
 (9)
(9)
Randamentul este dat de relatia:
 (10);[7]
(10);[7]
unde diametrul D1m al rotorului modelului se citeste pe model.(fig.4 ) [7]
Se calculeaza parametrul de similitudine geometrica :
 (11);[8]
(11);[8]
cu ajutorul caruia determinam celelalte dimendiuni de
gabarit ale mecanismului, citind pe model (fig. 4) marimile: inaltimea palelor bM, diametrul de dispunere al axelor palelor DoM
Cunoscand marimile λ, bM si DoM calculam inaltimea palelor pe turbina bn si diametrul de dispunere al palelor pe turbina DoM cu ajutorul criteriului de similitudine geometrica:
 (12);[8]
(12);[8]
In baza desenelor de ansamblu ale turbinelor, respecand proportiile, alegem constructiv diametrul de amplasare a axelor bolturilor de articulatie pe inelul mobil: Di=0,8∙Don
![]()
Din schema cinematica din fig. 3, rezulta lungimea
lenkerului:

Alegand constructiv lungimile bielei 2,rezulta din schema cinematica (fig. 3) ca:
 (14)
(14)
unde g este rotirea in radiani a inelului mobil fata de inelul fix, pentru ca pala sa se roteasca din pozitia 'inchis' in pozitia pentru debitul maxim de trecere a apei prin aparatul director.
Tot din schema cinematica rezulta, cursa maxima a pistonului, pozitia 5 (fig. 3), ca fiind egala cu l . Cunoscand cursa s= l , presiunea de lucru a hidromotorului, putem determina diametrul hidromotorului dupa ce calculam forta necesara rotirii inelului mobil. Din desenele de ansamblu ale turbinelor (fig. 6) rezulta lungimea tijei prin care forta dezvoltata de hidromotor se poate transmite inelului mobil '1'. (fig. 6)
Respecand proportiile din figura 6, alegem l =l =0,75 Dn, unde am notat cu li, lungimea elementelor cinematice din figura 3. Cunoscand diametrul de dispunere a axelor palelor D0n, se poate determina lungimea lo a palei ca fiind lungimea unui poligon cu un numar de laturi Zp=1636, circumscris cercului de diametru Don
 unde
unde 
Cunoscand cursa pistonului s= l , lungimea elementului cinematic '5' se determina cunoscand desenul de ansamblu al servomotorului din figura 8. [8]
IV CALCULUL DE DIMENSIONARE
IV.1 Calculul fusului palei
organe de masini: pala, lenker, pana paralela si piulita, dupa cum reiese din desenul de ansamblu al
mecanismului. Arborele palei este solicitat la torsiune datorita
fortei Fn, creata de presiunea apei ce actioneaza pe
suprafata palei si care are punctul de aplicatie la distanta a de axul palei.
Elementul cinematic 3, fig. 3, este
format din patru
Distanta a" se determina cunoscind lo si no calculand mai intii lo1 si lo2 din relatiile (14
Excentricitatea "n se alege din tabelul 1.2 cap.V.1.
![]()
lo=l +l
Rezulta: a=(l -l ( unde no are valoarea 0,04).
Lungimea l se calculeaza tinand cont ca ea este lungimea unui poligon regulat cu Zp laturi circumscrise unui cerc de diametru D0n. (vezi fig.3).
Pala este mentinuta in pozitia data datorita fortei F , forta cu care elementul cinematic '2' actioneaza asupra elementului '3 , prin intermediul boltului de articulatie de diametru d
Forta F apare in articulatie ca urmare a presiunii Pc din hidromotor, presiune care transmite forte in toate elementele mecanismului, forte pe care urmeaza sa le determinam, fiind
necesare la dimensionarea elementelor
mecanismului. Cunoscand adancimea la
care se afla pala fata de suprafata lacului de acumulare, se calculeaza presiunea pe pala si apoi valoarea fortei
hidrostatice Fh (Fh=ρgHSp;unde
Sp=bnlo este suprafata palei dupa ce calculam mai intai
suprafata palei [6].Inaltimea palei bn se calculeaza tinind cont de relatia (12). Fusul fiind solicitat la
torsiune de momentul de torsiune Mt calculam diametrul lui d cu relatia (15).In relatia (15) am notat cu Wp modulul de rezistenta polar al sectiunii.  (15) ;[3]
(15) ;[3]
(Mt=Fh a;Wp pd
Momentul Mt se transmite de la pala la lenker prin intermediul penei paralele. Alegand din STAS sectiunea penei functie de diametrul d ,[17];[11] calculam lungimea penei, din solicitarea la strivire cunoscand sas pentru pana, fiindca ne alegem materialul din care se executa pana.
sas=
![]() ;(15') ;[17]
;(15') ;[17]
Verificam pana la forfecare:
taf= (16)
(16)
-unde bp si hp reprezinta latimea respective inaltimea penei
IV.2 Proiectarea lenkerului
Elementul cinematic '3' este format din patru organe de masini solidar legate intre ele si anume: pala, lenker, pana aralela, piulita speciala, toate formand un rigid articulat pe fusul palei.
Din conditia de echilibru a rigidului cu axa palei, rezulta forta din articulatie dintre elementele cinematice '2' si '3'. Notam cu F forta din articulatie transmisa de elementul cinematic '2'
asupra elementului cinematic '3'. In baza principiului actiunii si reactiunii elementul '3' la transmite elementului '2' o forta egala si de semn contrar, pe care o vom nota cu F forta ce se transmite prin intermediul boltului de articulatie de diametru d
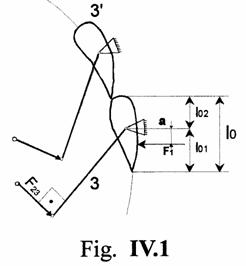
Vom scrie ca suma momentelor fortelor ce actioneaza asupra unui rigid in raport cu axa de rotatie este nula:
S Mo (16). In relatia (16) precizez prin indici ca axa de rotatie a rigidului coincide cu axa cuplei cinematice de clasa 5, de rotatie, formata intre elementul '3' si baza '0'.
Din figura IV.1 tinand cont de relatia (16) rezulta:
F ∙l - Fh∙a = 0 (17),
unde am notat cu 'l ' lungimea lenkerului. Din relatia (17) rezulta modulul fortei F , directia si sensul fiind precizate pe fig. IV.1.
Forma constructiva a lenkerului rezulta din rolul functional. (vezi fig. IV.2)
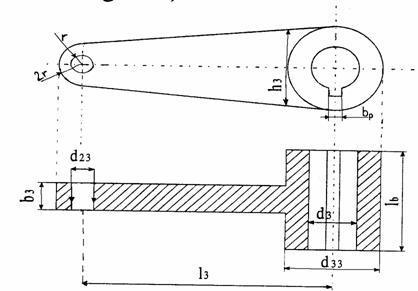
Fig. IV.2
Articulatia (cupla cinematica C de rotatie) dintre elementele cinematice '2' si '3' se realizeaza printr-un bolt de diametru d . Pentru o distributie uniforma a eforturilor de strivire pe suprafetele in contact dintre bolt si elementele '2' si '3' de furca, forma care conduce totodata la marirea durabilitatii articulatiei precum si la micsorarea pierderilor de energie prin frecare. In figura IV.3 se reda forma articulatiei dintre elementele cinematice '2' si '3' .
Fig 4.3
Pentru buna fuctionare a articulatiei alegem un ajustaj alunecator intre bolt si elementele cinematice adiacente.
Tolerantele pentru bolt si elelemntele '2' si '3' se aleg din STAS in conformitate cu ajustajul ales.
Diametrul d se calculeaza tinand cont de faptul ca prin furca se creeaza doua sectiuni de forfecare a boltului (vezi fig. 4.3) :
Alegand materialul din care se executa boltul si afland valoarea efortului unitar admis la forfecare,taf din relatia (18) determinam valoarea diametrului d , pe care o trecem si pe figura IV.2 cu tolerantele corespunzatoare ajustajului precizat mai inainte. Se trec de asemeni pe figura si valorile d si l deja calculate.
La diametrul d se trec tolerantele din STAS pentru ajustajul presat usor, recomandat la asamblarile prin pene paralele. Diametrul butucului db3 se alege constructiv:
dB3 = 1,3∙d [16]
Dimensiunile canalului de pana din butuc se iau din STAS in functie de diametrul alezajului d
Lungimea butucului lenkerului lb fig.lV.2) se ia constructiv cu 23 mm mai mare decat lungimea penei, lungime ce se calculeaza din conditia solicitarii la strivire si se verifica la forfecare: [16]

Cunoscand din STAS inaltumea penei h din relatia (19) se poate determina lungimea penei lp
Verificarea la forfecarea penei se face cu relatia:
![]() (20);[16] unde
am notat cu b latimea penei
corespunzatoare dimatrului d
(20);[16] unde
am notat cu b latimea penei
corespunzatoare dimatrului d
|
Pentru a calcula inaltimea h a tijei, trebuie observat mai intai ca sectiunea respectiva este solicitata la incovoiere, in conformitate cu fig. IV.3, unde am notat |
Grosimea b a tijei lenkerului se
calculeaza din conditia rezistentei lui la strivire pe suprafata de contact cu
lenkerul, cu relatia: [10]
![]()
 (21);[16]
(21);[16]
![]()
![]()
dupa cum reiese din figura IV.2.
Deci am cosiderat tija o grinda incastrata de lungimea lt solicitata la inconvoiere.
Tinand seama de figurile IV.2 si IV.3 putem scrie :
 (23);[16]
(23);[16]
unde modulul de rezistenta axial Wz are valoarea :
iar momentul de inconvoiere maxim are valoarea Mi max = F ∙lt
Alegand efortul unitar admisibil la inconvoiere fuctie de material [16] determinam din relatia (22) valoarea lui h , avand in vedere totadata relatiile (23) si (24).
IV.3 Proiectarea elementului cinematic '2', biela
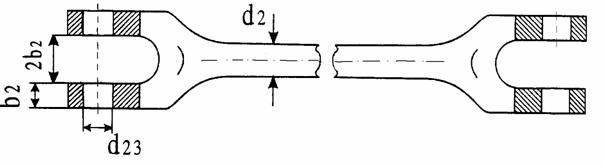
Fig. IV.3.
Din schema cinematica a mecanismului rezulta ca acest element transmite miscarea si forta de la inelul mobil '1' la lenkerul '3'. (fig. 3). Dupa cum am mentionat lungimea lui este jumatate din lungimea l . Ambele capete ale elementului sunt prevazute cu furca, cele doua furci fiind identice, avand in vedere faptul ca fortele din cele doua articulatii sunt egale in modul dar de semn schimbat :
IF I IF I (25)
Relatia (25) s-a scris pe baza conditiilor de echilibru ale unui rigid si tinand cont ca reactiunea din articulatii este o forta de marime si directie necunoscuta.
Cum se cunoaste marimea si directia fortei F , dupa cum e precizat mai inainte rezulta din conditia de echilibru
S F = 0 (26), valoarea fortei cu care elementul '1' actioneaza asupra elementului '2', deci valoarea F
Diametrul d al acestui element se calculeaza pe baza solicitarii la compresiune
 (27);[16];[9]
(27);[16];[9]
Inaltimea b a furcii (fig. 4.3) rezulta din calculul la strivire
 (28);[16]
(28);[16]
'2' d este acelasi cu d in baza relatiei (25).
IV.4 Determinarea fortei din articulatia
dintre inelul mobil '1' si tija '4'
|
Dupa cum reiese din figura alaturata am notat acesta forta F , care ne sugereaza faptul ca elementul cinematic '4' actioneaza prin boltul de articulatie asupra elementului cinematic '1'. Forta F este forta cu care elementul cinematic '2' actioneaza asupra elementului cinematic '1'. |
Numarul de forte F este egal cu numarul de pale
ale aparatului director si asa cum reiese din figura 3, ele sunt plasate
echidistant de inelul mobil si formeaza toate acelasi unghi cu tangenta la
cerc, anume p
Pentru a avea reactiunea nula in articulatia dintre inelul mobil si cel fix (baza), respectiv articulatia 'o' din figura IV.4.1, vom alege constructiv doi cilindri hidraulici identici ca sa creeze fortele F si F' egale in modul dar de sens contrar.
Marimea fortei F41 rezulta din conditia
S Mo
![]()
![]()
![]()
 (30)
(30)![]()
Unde Zp este numarul de pale
Din relatia (30) scrisa pe baza relatiei (29) rezulta marimea fortei F
![]()
Avantajul constructiei cu doi cilindri hidraulici rezulta
din cresterea randamentului mecanic al aparatului director prin anularea
mometului de frecare al inelului mobil si cel fix, moment dat de relatia :
Reactiunea Ro din articulatie este nula (asupra ineluli actioneaza numai cupluri de forte dupa cum reiese din relatia (30) si din distributia echidistanta a fortelor F pe periferia inelului mobil).
Relatia (30) s-a scris pentru pozitia inchis a aparatului director, deci pentru situatia cand valorile fortelor ce actioneaza asupra inelului mobil sunt maxime.
IV.5 Dimensionarea cilindrilor hidraulici
ai aparatului director
Asupra elementului
cinematic '5' (pistonul
servomotorului) actioneaza presiunea p
si forta F
Din relatia de echilibru, S Fx (32) , rezulta diametrul Dc al cilindrului hidrauluic, deoarece forta IF I IF I, in baza principiului actiunii si reactiunii dintre corpuri iar presiunea p este cunoscuta pentru ca se da presiunea la care lucreaza sistemul de actionare hidraulica a servomotoarelor.
 (32);[16]
(32);[16]
Din (32) rezulta diametrul Dc al cilindrului hidraulic. Cunoscand unghiul g de rotire al inelului mobil si aproximand arcul cu coarda pentru acest unghi,calculam cursa pistonului:

unde g se ia in radiani.
Pe baza diametrului cilindrului Dc a cursei s a pistonului si a presiunii de lucru p se alege din STAS cilindrul hidraulic.
![]() Tinand cont ca Di>>d2i, iar d2i=d n-am mai luat in calcul
momentele de frecare din articulatii, a caror marime este:
Tinand cont ca Di>>d2i, iar d2i=d n-am mai luat in calcul
momentele de frecare din articulatii, a caror marime este:
![]()
 (34)
(34)
pentru un bolt, unde h este coeficientul de frecare din articulatie. Energia disipata printr-o articulatie este :
Wf = Mf j (35)
unde j este unghiul de roatie dintre elementul cinematic ce formeaza cuplele de rotatie C . Aceste unghiuri rezulta din schema cinematica a mecanismului aparatului director.
In baza relatiilor (34) si (35) se poate efectua un calcul exact al energiei totale pierduta prin frecare, fapt ce ne poate permite un calcul exact al Dc. Din aprecierile mentionate mai sus rezulta ca putem renunta la aceste calcule, marind Dc cu 1
IV.6 Dimensionarea elementului cinematic '4'
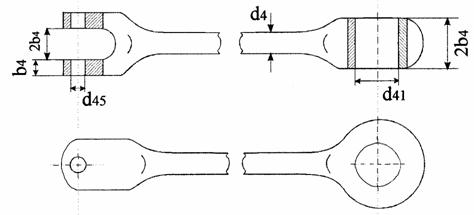
fig. IV.6
Acest element 'tija', face legatura intre pistonul '5' si inelul mobil '1', prin bolturile de articulatie de acelasi diametru d =d , deoarece forta ce actioneaza in cele doua articulatii este aceasi: (F ) = (F
Pentru o buna distributie a presiunilor pe suprafetele in
contact din articulatie, stabilim forma de furca la ambele capete pentru acest element, forma ce conduce la micsorarea diametrului la bolturi, deoarece fprtele sunt preluate astfel prin doua sectiuni de forfecare.
Mersul de calcul din aceste articulatii este identic cu cel din articulatiile dintre biela '2' cu lenkerul '3', ori cu inelul '1'.
Din schema generala a turbinei (fig.1), rezulta lungimea tijei
![]()
constructiv aleasa astfel incat sa asiguram prinderea la elementul de baza a cilindrului hidraulic.
Lungimea l fiind mare, si tija fiind solicitata la compresiune, calculam diametrul ei din conditia de a nu flamba. Tija fiind articulata la ambele capete, lungimea de flambaj este egala cu lungimea tijei:
 (
(
unde coeficientul de zveltete are valoarea:
 (38);[10];[12]
(38);[10];[12]
unde
raza de inertie este:![]()
 [10];[12]
[10];[12]
unde Imin este momentul de inertie geometric minim al sectiunii
tijei, unde: 
 ; unde Fcr=C F41(39),iar c coieficient de
; unde Fcr=C F41(39),iar c coieficient de
siguranta. [3]
In relatiile de mai sus E este modulul de elasticitate al materialului, iar A este aria sectiunii. In baza relatiior de mai sus se determina diametrul tijei.
In baza datelor obtinute pe baza de calcul se stabileste forma constructiva a acestui element si apoi desenul de executie.
IV.7 Calculul inelului mobil '1'
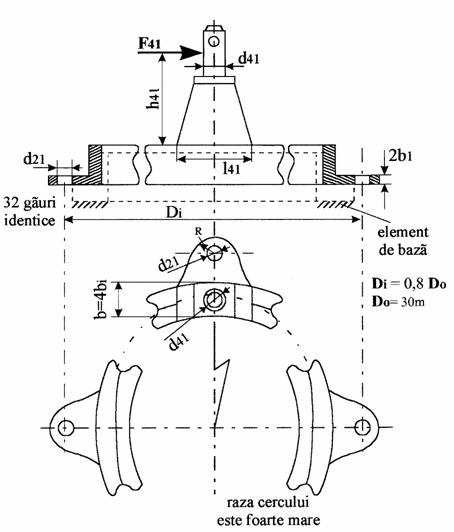
fig.IV.7
 (40);[9];[10]
(40);[9];[10]
Valorile d21 si 2b1 din figura IV.7 se iau din calculele anterioare.
Valoarea d41 se calculeaza din relatia (40).
Marimile lui h se stabilesc constructiv. Marimea fortei F41 a fost calculata anterior.
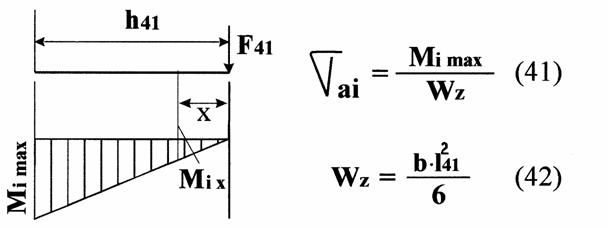
Din relatiile (41) si (42) se determina lungimea l41.
Rolul functional al acestui element cinematic determina forma lui. Impreuna cu inelul fix (baza) ,fig. IV.8, determina articulatia 'o' din schema cinematica a mecanismului.
Diametrul Di al inelului reprezinta diametrul de dispunere al bolturiolor de articulatie de diametru d . Numarul de pale determina numartul de gauri echidistante pe inelul mobil de acelasi diametru cu diametrul bolturilor. Forma caracteristica se realizeaza tinand cont ca cele doua articulatii prin care inelul primeste miscarea de la cilindri se deplaseaza intr-un plan paralel cu planul celorlalte articulatii si superioare acestuia. Distanta dintre cele doua articulatii este tot Di, motiv pentru care distanta dintre cele doua plane trebuie sa fie suficient de mare astfel ca intre boltul de diametru d41 si boltul inferior de diametru d21 sa fie un spatiu de aproximativ 5 mm.
In pozitiz deschis a palei, axa elementului cinematic '2' devine coarda in cercul de diametru di, motiv pentru care rezulta o forma corespunzatoare a elementului '2' sub forma de furca la ambele capete.Tinand cont de calculele anterioare precum si de figura 5 si figura 6 se stabileste forma constructiva si apoi desenul de executie al acestui element cinematic.[8]
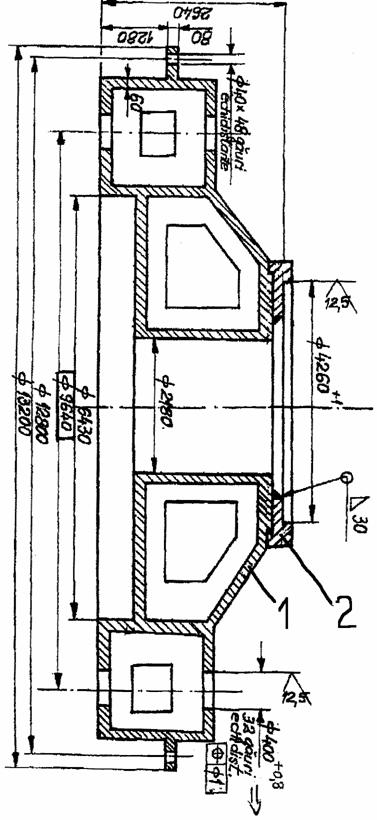 Prin intermediul gaurilor f400 se
realizeaza cuplele C dintre elementul baza si elementul 3(articulatia "O "
din fig.3 iar prin diametrul f4260 se realizeaza cupla C
dintre elementul de baza si inelul mobil (art. "O" din fig.3.
Prin intermediul gaurilor f400 se
realizeaza cuplele C dintre elementul baza si elementul 3(articulatia "O "
din fig.3 iar prin diametrul f4260 se realizeaza cupla C
dintre elementul de baza si inelul mobil (art. "O" din fig.3.
FIG.IV.8
ASAMBLAT)
1.Element baza
2.Inel fix
V TEORIA APARATULULUI DIRECTOR LA TURBINE
camera spirala
fig. V.1
Aparatul direcor conduce apa de la camera in spirala (fig. V.1)spre rotor si asigura vitezele, respectiv circulatia G necesara transformarii energetice optime, in conditiile pierderilor hidraulice minime. De asemenea asigura o distributie uniforma a debitului pe periferia rotorului la intrare si un camp hidrodinamic caracteristic unei curgeri axial simetrice. Functiunea de variatie a debitului, respectiv de reglare a cuplului motor al turbinei revine aparatului director.
V.1 DIMENSIUNILE PRINCIPALE ALE APARATULUI DIRECTOR
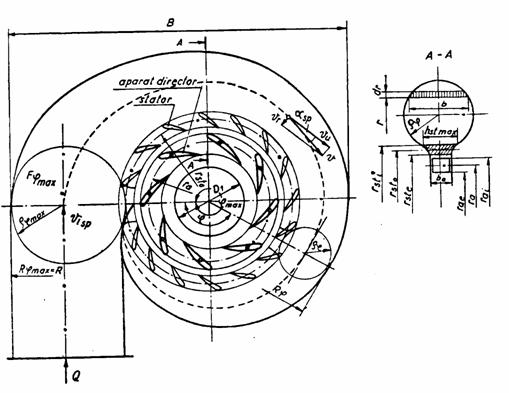
Un aparat director cilindric utilizat in constructia turbinelor Kaplan si Francis este caracterizat din punct de vedere geometric de parametrii din fig.V.2, in care sunt reprezentate paletele directoare la deschiderea optima (a), la pozitia inchis complet (b) si in pozitia radiala (c).
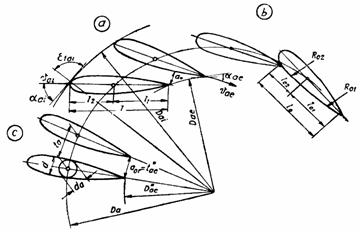
fig. V.2
Dimensiunile relative Da/D ale cercului Da de amplasare a fusurilor paletelor aparatului director si cele ale profilului acestora calculate dupa Kovalev sunt date in tabelul 1.1.

Tabelul 1.1
Aici, D =D la turbinele Kaplan si D =D e in cazul turbinelor Francis. I. Raabe recomanda pentru turbinele Kaplan Dae/D 1,05, iar la turbinele Francis cu ns Dae/D
Pozitia fusului paletelor fata de bordul de atac si de fuga este definita prin excentritatea no=lo -lo lo. Kovalev recomanda pentru no valorile din tabelul 1.2, in care za este numarul palelor.
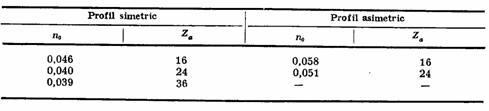
tabelul 1.2
Deschiderea paletelor directoare este definita prin ao , deci prin distanta dintre doua palete invecinate masurata de la bordul de fuga al uneia pana intr-un punct oarecare al celeilalte. Uneori deschiderea se exprima ca o marime relativa:
 , deoarece
, deoarece  ,
, 
 ,deoarece
,deoarece  .
.
In cazul in care se compara functionarea a doua turbine oarecare
 (43)
(43)
Daca cele doua turbine sunt asemenea se obtine :
 sau
sau  (44)
(44)
Aceste relatii permit transpunerea caracteristicilor functionale ale aparatului director al turbinei model la cea industriala. Un parametru important in constructia si functionarea turbinelor, respectiv in transpunerea rezultatelor de la un aparat director la altul, este unghiul aae
Acesta este unghiul constructiv inchis de tangenta la ultimul element al scheletului palei directoare si tangenta la cercul
paralel de la iesire. Unghiul aae difera relativ putin de ungiul vitezei absolute Vae si depinde de geometria profilelor paletelor directoare. Dupa Raabe, aae=20o65o la ns
In figura V.3 sunt prezentate profilele cu curba negativa (a), simetrice (b) si cu curba pozitiva (c). In cazul acestora, deschiderea ao este aceeasi.
Dependenta aae f(ao si Q f(aoe , respectiv Q f(aae sunt reprezentate in fig. V.3 - V.6.
Rezulta de aici ca debitul Q ce trece prin aparatul director este aceasi la aae =const., indiferent de geometria profilului in timp ce la ao=const., Q depinde de profil.
V.2 I NALTIMEA APARATULUI DIRECTOR bo
SI DESCHIDEREA aomax
Inaltimea paratului director bo este unul dintre parametrii care alaturi de aae si turatia turbinei influienteaza apreciabil valoarea debitului Q si a circulatiei G de la intrarea in rotor, respectiv transformarea energetica din turbina.
In figura V.7 se prezinta pentru o turbina radial-axiala Q11max=f(bo obtinut experimental si prin calculul cu relatia (48) de Gutovski, considerand aae=const. si n =const.
In cazul in care V u , deci al unei miscari axiale la iesire din turbina din (46) se obtine :
 (45)
(45)
relatie ce releva influienta lui bo si aae asupra debitului Q la o turatie specifica data ns=const.
Cercetarile experimentale si practica constructiei de turbine recomanda orientativ pentru inaltimea bo a aparatului director si deschiderea maxima valorile din fig. V.8.
Deschiderea aomax (aomax corespunde debitului Q max ce trece prin turbina si se calculeaza pentru caderea minima Hmin de functionare a turbinei si puterea nominala. Aceasta descriere difera aoptim corespunzator regimului de randament maxim situau in centrul caracteristicii universale.
V.3 VARIATIA DEBITULUI CU PARAMETRII
In cazul unei turbine hidraulice cuplate cu un generator electric, ecuatia fundamenrala a dinamicii se scrie :
I dwdt = Mm - Mr
unde:
I este momentul de inertie al turbinei si al generatorului,
w viteza unghiulara,
Mm - momentul motor, Mm gQHh w
Mr - momentul rezistent.
In functionarea unei turbine n=const.,
deci w=const. orice variatie a
cuplului rezistent impune o modificare a cuplului motor pentru a asigura
Se stie ca hhgH = u Vu -u Vu (46)
iar
Vu = U2 - Vm ctg b = u - QS ctg b
Inlocuind in relatia (46), se obtine:
 (47)
(47)
 (48)
(48)

De aici rezulta ca debitul unei turbine date ce functioneaza la turatia n si cadere H constanta, depinde de unghiurile aae si bae ,unghiuri ce caracterizeaza directiile vitezelor absolute Vae de la iesire din aparatul director, respectiv vitezele relative W de la iesire din rotor fata de directiile tangentiale. Constructia turbinelor Francis este de regula cu aae variabil si bae=const., deci cu reglare simpla a debitului. In cazul turbinelor Kaplan, bulb si Deriaz pozitia paletelor rotorului b f este variabila ce poate duce la o reglare dubla (aae≠const., b ≠const.) sau simpla (aae=const. ori b ≠const.
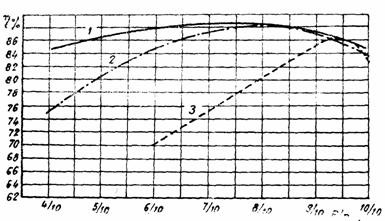
Fig. V.9
Curbele de garantie in cazul celor trei sisteme de reglare cu un rotor de turbina axiala incercat in acelasi circuit hidraulic sunt prezentate in fig. V.9. Astfel : 1 - este cazul reglarii duble, 2 - paletele directoare fixe si 3 - palete rotorice fixe. Rezulta deci ca aparatul director ori rotorul cu palete reglabile asigura variatia debitului si deci a cuplului motor. In cazul in care se realizeaza o reglare dubla, randamentele sunt ridicate intr-un domeniu larg de variatie a puterii, respectiv a debitului.
Relatia (48) arata ca modificarea parametrilor geometrici bo, r si S conduce de asemenea la o variatie a debitului Q11opt. La turbine mici de tipul Kaplan se utilizeaza un dispozitiv tip clopot, care asigura modificarea inaltimii bo si deci a debitului.
V.4 CURENTUL DINTRE
APARATUL DIRECTOR SI ROTOR
In cazul turbinelor Kaplan curentul de la iesire din aparatul director efectueaza o rotatie de 90o spre rotor, iar la turbinele radial-axiale (Francis si Deriaz) intoarcerea este sub 90o. Structura acestui curent este influientata in primul rand de caracteristica vitezelor de la iesire din reteau paletelor directoare si geometria intoarcerii. Intrarea in reteaua radiala, care se construieste in general cu ta l ≥ 1,1, influienteaza in mica masura cinematica curentului la iesire, pentru majoritatea deschiderilor ao
In figura V.10 se reprezinta campul hidrodinamic zona de intoarcere a unei turbine Kaplan in ipoteza. De aici se vede ca vitezele meridionale din apropierea inelului intrec de 2-3 ori vitezele meridionale mijlocii intr-o sectiune data. Campul hidrodinamic reprezentat se apropie de cel obtinut in cazul in care deschiderea este maxima si egala cu aor. Odata cu micsoraea deschiderii ao, vitezele de la periferie scad si cresc la butuc, iar la ao=5065 % apare o nivelare a vitezelor. La deschideri mai mici se obtin viteze meridionale mai mici la periferie si mai mari la butuc. Experientele efectuate de V.S. Kviatkovski si I. Povh au confirmat cele
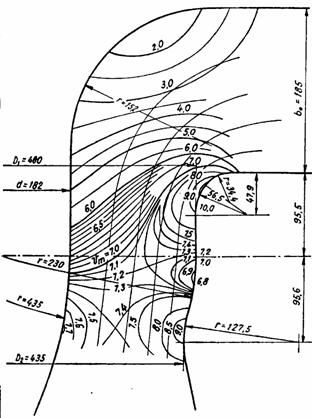
Fig. V.10
spuse mai sus si au aratat ca r1nu1=f(r), adica circulatia G =2pr Vu1≠const., deoarece vitezele meridionale la iesire din aparatul director la baza paletelor difera de cele din partea superiaora, fig. V.11.
Dian cauza valorilor Vmae diferite pe inaltimea bo, valorile componentei tangentiale a vitezei absolute Vuae=Vmae ctgaae vor fi si ele diferite, ceea ce atrage dupa sine o variatie a circulatiei G . Paletele directoare sunt drepte si deci aae=const. pe toata inaltimea bo. Deoarece Gae G 2pr1Vu1, inseamna ca G =f (r) si anume va creste odata cu raza. Aceasta crestere masurata este de cca. 1020% si variaza liniar fig. V.12. Ea atrage dupa sine o variatie similara a circulatiei G 2pr2Vu2 de la iesire din turbina, stiind ca r Vu1 r Vu2 hh gH w. Prin laegerea unei variatii potrivite prntru aae=f (z) se ajunge la o constructie a paletelor directoare torsionate, care asugura Gae G =const. si Vm=const. pentru toate firele, insa nu realizeaza etaseitatea la inchiderea completa a aparatului director.
In cazul turbinelor bulb cu apart director axial s-au construit paletele torsionate, care asugura conditiile unui curent potential raeVuae=const. si Vm=const., precum si conditiile de inchidere etansa.
In functionarea turbinelor radial-axiale feneomenele sunt similare ca si la turbinele Kaplan, dar mai atenuate. Atenuarea este mai pronuntata la turbinele Francis de inalta incredere (ns mic), unde distanta dintre aparatul director si
rotor este mica , iar liniile de curent sunt paralele intre ele si perpendiculare pe axa turbinei, in zona aparatului director si deci la intrarea in rotor.
La turbinele Francis de joasa cadere curba liniilor de curent incepe inca pe paletele directoare, fig. V.10, iar vitezele meridionale perpendiculare pe ax Vomae=Vmaecosgae de-a lungul muchiei de iesire a paletei directoare. Acesta variatie atrage dupa sine si variatia componentei tangentiale Vuae,a vitezei Vuae=Vmaecosgaetggae, respectiv circulatia Gae G , inseamna ca circulatia de la intrarea in rotor va varia cu raza G f(r)
In functionarea acestor turbine influienta cotului se manifesta in mod deosebit asupra vitezelor meridionale din rotor, care este ampalsat, tocmai in zona de intoarcere.
V.5 PROFILAREA PALETELOR
APARATULUI DIRECTOR
Paletele directoare constituie o retea radiala de profile, care la trecerea curentului trebuie sa asigure pierderi hidraulice minime. Acestea se cer sa fie potrivit profilate, iar elementele geometrice si unghiulare alese in asa fel incat functionarea lor sa duca la randamente cat mai ridicate.
Geometria profilelor directoare se obtin din:
V.6 FORTELE SI MOMENTELE CE ACTIONEAZA PE PALETA APARATULUI DIRECTOR
In vederea dimensionarii mecanice a aparatului director a calculului servomotorului regulatorului si a mecanismului de reglare este necesar sa se cunoasca fortele, respectiv momentele hidraulice ce actioneaza asupra paletelor directoare la fiecare deschidere ao
Acestea pot fi determinate prin mai multe cai, in tocmai ca si in cazul unor retele radiale si anume prin:

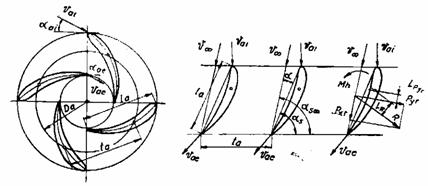
Fig. V.14
Uneori se noteaza Cp*y rCpy si Cp*x. Valorile lui Cpy, calculate cu relatia (53) pentru doua aparate directoare cu Za=24 si boD =0,4 sunt cele din fig. V.19.
Momentul hidraulic Mh=RxLR ≈ PyrxLpyr sau:
Fig. V.15 Fig. V.16
V.6.3 METODE TEORETICE
Aceste metode, fie ca este vorba de problema directa sau indirecta, conduc la rezolvarea completa a retelei, respectiv la calculul caracteristicilor de forte si momente. Avantajul acestor metode este acele al posibilitatii utilizarii calculelor electronice. Ca dezavantaj mentionam lipsa unor relatii pentru calculul exact al pierderilor hidraulice ce apar la trecerea curentului prin retea. O cale de rezolvare este aceea oferita de dr. Ing. Monica Gheorghiu.
VI. APARATE DIRECTOARE SI ROTOARE DE TURBINE KAPLAN SI FRANCIS, REALIZATE PRACTIC SI PREZENTATE FOTOGRAFIC
Dorim ca prin aceste fotografii sa ajutam studentii in relizarea acestui proiect.pe baza lor ,ele fiind suficient de sugestive,cei incepatori in acest domeniu atit de necesar al proiectarii ,pot sa descifreze mai bine fig.5 , fig.6 , fig.7, fig.8 , figuri ce constituie punctul de plecare pentru documentarea si proiectarea mecanismului aparatului director de la turbinele KAPLAN si FRANCIS pe baza acestui indrumar precum si al bibliografiei indicate, astfel aleasa incit sa le fie accesibila.
VII.DOCUMENTATIA PROIECTULUI
Rezultatul muncii de cercetare , documentare si de proiectare in vederea realizarii unui proiect il constituie documentatia tehnica a lui ,documentatie ce este constituita din desenele de executie ,desenele de subansamblu si desenul de ansamblu al proiectului.
Aceasta documentatie realizata in institutiile ori atelierele de proiectare este transmisa uzinelor ori intreprinderilor care au rolul de a materializa aceste proiecte.
Pe baza desenului de executie al unui reper, muncitorii il realizeaza practic respectand intocmai toate datele pe care le contine: dimensiuni nominale ,tolerante ,rugozitati ,calitatea materialului, tratamente termice ,duritatea suprafetelor precum si celelalte conditii tehnice inscrise pe desenul de executie.
Pe baza desenului de subansamblu si ansamblu muncitorii realizeaza operatiile de asamblare in conformitate cu desenul respective, folosind elementele de asamblare standardizate, precizate in tabelul lor de componenta: suruburi, piulite, garnituri, bolturi, splinturi, rulmenti etc..
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 5828
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved