| CATEGORII DOCUMENTE |
AUTOMATIZARI - PROIECTAREA SISTEMELOR DE CONDUCERE CU AUTOMATE PROGRAMABILE
Pentru a prezenta cateva caracteristici a unei metode de proiectare pe care o folosesc in cazul sistemelor de conducere cu automate programabile trebuie, la inceput, sa fac o delimitare a automatelor programabile de celelalte calculatoare care sunt folosite in cazul unui sistem de domotica. Aceasta este cu atat mai necesar cu cat exista automate programabile implementate pe PC, asa numitele Soft-PLC.
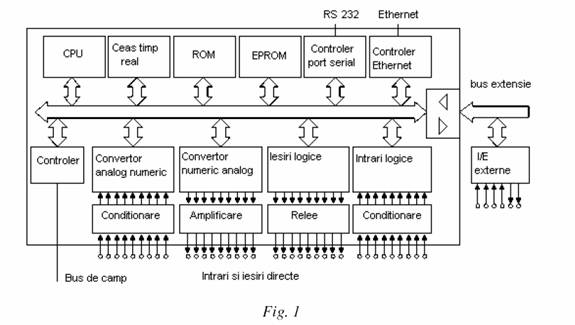
Automatele programabile (AP) pot fi considerate microcalculatoare specializate care functioneaza in timp real, adica asigura o limita maxima pentru durata procesului de achizitie, prelucrare si redare a informatiilor. Arhitectura tipica a unui AP este prezentata in Fig. 1. Se observa rolul important al intrarilor/iesirilor logice si analogice si al posibilitatilor de extensie.
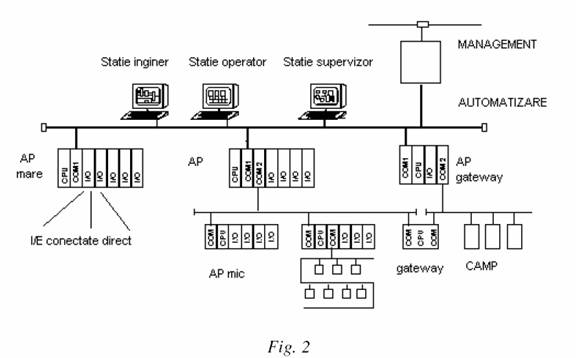
Intr-un sistem de domotica, Fig. 2, pot exista la nivelul de management si nivelul de automatizare calculatoare care nu indeplinesc conditia de functionare in timp real, de exemplu diversele servere (web, baze de date, ftp, etc), gateway sau statii clienti. Sistemul lor de programare este diferit de cel pentru AP.
Desi in Fig. 2 nu apar, aproximativ 20% dintre calculatoarele folosite in conducerea automata in timp real nu sunt de tip AP, principala deosebire constand in caracteristicile software care permit o programare mai elastica. Intr-adevar, schema de functionare pentru AP consta in scanarea intrarilor, executarea algoritmului de conducere, actualizarea iesirilor si realizarea operatiilor de intretinere. Proiectarea in aceasta situatie este concentrata asupra
algoritmului de conducere deoarece ciclurile de intrare, iesire si intretinere sunt ascunse.Celelalte tipuri de calculatoare folosite in conducerea automata, numite PAC (Programmable Automation Controller) ofera un acces mai profund la resursele hardware ale sistemului.
Si din Fig. 2 se observa rolul important al intrarilor/iesirilor si comunicarii prin
magistrala (bus) de automatizare si magistralele de camp. Automatele programabile pot juca diferite roluri intr-un sistem de domotica: interconectare directa I/E, Interconectare I/E prin intermediul magistralei de camp sau gateway intre magistrale.
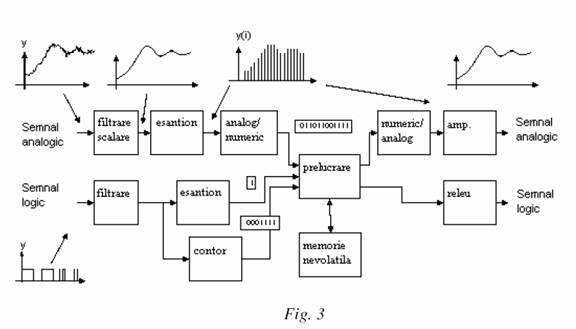
Semnalele I/E logice si analogice sunt prelucrate in mod diferit,
Fig. 3 si din aceasta cauza si metodele de proiectare sunt diferite.
Esantionarea cu o perioada
Proiectarea unui sistem de conducere cu AP are cel putin urmatoarele etape:
1. Identificarea procesului.
2. Stabilirea algoritmului de conducere si a performantelor necesare.
3. Programarea AP
4. Configurarea AP
Orice discutie privind proiectarea sistemelor de conducere cu automate programabile nu poate fi facuta in afara standardelor IEC 61131 si IEC 61499. Standardul IEC 61131 are urmatoarele sectiuni:
. IEC 61131-1 Generalitati
. IEC 61131-2 Testare
. IEC 61131-3 Programare si tipuri de date
. IEC 61131-4 Ghidul utilizatorului
. IEC 61131-5 Comunicatii
. IEC 61131-7 Conducerea Fuzyy
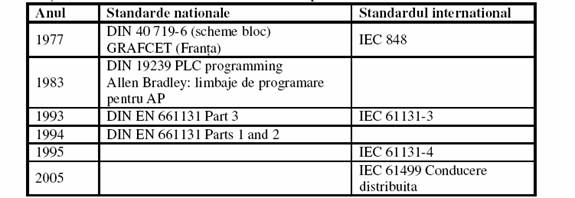
Evolutia standardelor referitoare la AP este prezentata in tabelul urmator:
O importanta deosebita are standardul IEC 61131-3 care prevede urmatoarele modele pentru programarea AP:
1. LD (Ladder Diagram) - schema desfasurata cu contacte si relee
2. FBD (Function Block Diagram) - schema bloc
3. IL (Instruction List) - program tip assembler
4. ST (Structured Text) - program tip Pascal
5. SFC (Sequential Function Charts) -grafcet
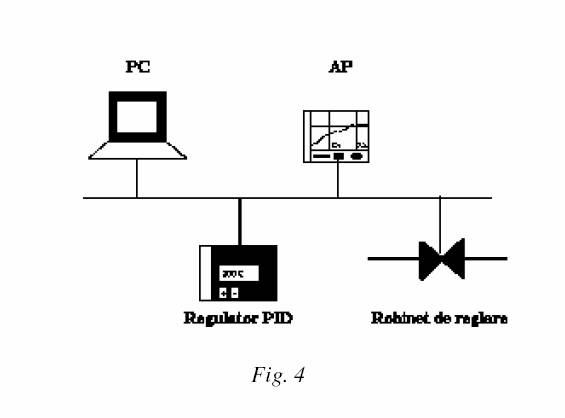
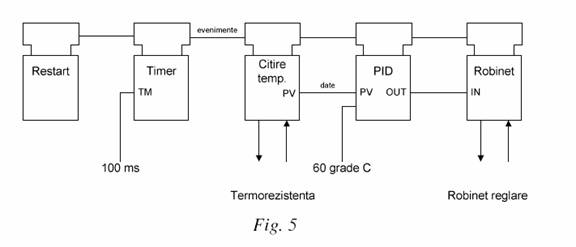
Pentru programarea sistemelor de conducere distribuite cu AP s-a elaborat standardul IEC 61499. In Fig. 4 se prezinta o schema tehnologica simpla pentru un sistem de conducere distribuit format dintr-un PC, un AP, un regulator PID si un robinet de reglare, toate interactionand prin intermediul unei magistrale (bus). Un program sub forma de FBD conform IEC 61499 pentru acest sistem de conducere distribuit apare in Fig. 5. Intre blocurile functionale exista o legatura la nivelul fluxului de evenimente si la nivelul fluxului de date. Fiecare bloc poate sa aiba diferite intrari si iesiri cum ar fi referinta SP si iesirea AUT pentru regulatorul PID. Blocul RESTART furnizeaza eveniment pentru executia periodica a celorlalte blocuri functionale.
In cadrul foarte general furnizat de aceste standarde vreau sa prezint o modalitate de proiectare a sistemelor cu AP pe care am elaborat-o. Bineinteles ca metoda are multe limitary dar este mai simpla si, lucru important, destul de algoritmizata, permitand si inginerilor mai putin experimentati proiectarea unor sisteme de conducere cu performante bune. In primul rand, modelul pentru sistemul de conducere este o retea Petri conforma si nu un grafcet cum prevede IEC 61131-3. Grafcetul este mai general si mai elastic pentru constructia de modele decat reteaua Petri /11/. In schimb modelul Petri este mai usor de analizat si trades sub forma unui model matematic care sa stea la baza elaborarii programului pentru AP. Stabilirea relatiilor logice o fac cu ajutorul unor automate elementare cu prioritate la pornire, spre deosebire de solutia recomandata in /8/ care foloseste automate elementare cu prioritate la oprire. Solutia mea este mai aproape de spiritul grafcetului si evita erori care pot apare la elaborarea unor modele care contin paralelisme de tip conveyor. Metoda de proiectare va fi
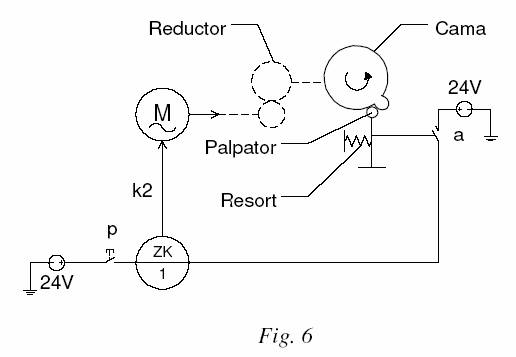
prezentata in continuare pe baza exemplului automatului care porneste un motor electric si dupa o rotatie il opreste in pozitia initiala, Fig. 6.
Primul pas in proiectarea unui sistem automat consta in alegerea solutiei de conducere automata. In cazul de fata se doreste o solutie simpla, care sa nu controleze continuu pozitia axului motorului. Motorul trebuie sa porneasca la actionarea butonului de pornire p si sa se opreasca la actionarea contactului a care indica terminarea unei rotatii. Algoritmul de conducere prezentat ia in considerare numai evenimente discrete logice si prin urmare sistemul automat va fi de tip cu evenimente discrete.
Automatistul impreuna cu tehnologul elaboreaza schema tehnologica cu aparatura de automatizare din Fig. 4. Modul in care se realizeaza aceasta nu poate fi algoritmizat. Solutia aleasa depinde de foarte multi factori: banii disponibili pentru instalatia de automatizare, aparatele de automatizare care pot fi procurate, mediul de lucru al sistemului, fiabilitatea impusa sistemului, calificarea necesara personalului de intretinere, costul si timpul acordat proiectului de automatizare, etc. In cazuri simple, ca acesta, se folosesc exemple asemanatoare. Schema tehnologica cu aparatura de automatizare prezinta instalatia care urmeaza sa fie condusa automat, motorul electric impreuna cu traductorul de pozitie si statia de comanda cu numarul 1. Traductorul de pozitie este format din reductorul de turatie, cama, palpatorul si contactul a. La terminarea unei rotatii palpatorul actioneaza contactul a care se inchide. Motorul se mai roteste putin si datorita formei camei palpatorul deschide contactul a. In aceasta pozitie motorul trebuie sa se opreasca. Traductorul trebuie ales dupa caracteristicile tehnice necesare din cataloagele de specialitate sau trebuie proiectat si construit. Statia de comanda a pozitiei motorului are la intrare contactele a si p, si la iesire contactul k2. Simbolul care o reprezinta indica faptul ca statia de comanda se gaseste in alt loc decat motorul electric. Distanta dintre statie si motor poate ajunge la cateva sute de metri. Din punct de vedere fizic statia de comanda este un dulap, cutie sau tablou care contine diferite componente si aparate de automatizare. In mod curent statia de comanda poate contine:
. Alimentarea cu energie electrica a instalatiei tehnologice.
. Alimentarea instalatiei de automatizare.
. Automatul, automatul programabil, regulatoarele sau microcalculatorul de proces.
. Sistemul de semnalizare.
. Sistemul de protectie.
. Sistemul de comutare in diferite regimuri de functionare.
. Sistemul de comunicare la distanta.
Statiile de comanda trebuiesc proiectate si construite din punct de vedere hardware (mecanic, electric si electronic) si software. In aceasta lucrare se va pune accentul, in special, pe proiectarea sistemului de conducere.
In continuare se va prezenta in special proiectarea automatului, elementului de executie, a sistemului de semnalizare si comutare in diferite regimuri de lucru.
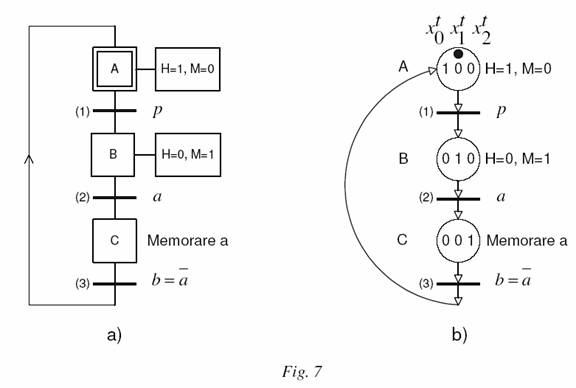
Caietul de sarcini. Algoritmul simplu de conducere al motorului este prezentat sub forma de grafcet in Fig. 7 a). Exista trei etape si trei tranzitii. Etapa A este activa initial si prin conventie, daca nu este specificat altfel, se considera ca toate actiunile, exprimate prin expresii logice, iau in aceasta etapa valoarea 0, adica valoarea logica fals. Deci si motorul electric este oprit in aceasta etapa.
Analiza structurala. Sa consideram ca exista o retea Petri echivalenta grafcetului. Structura sa este identica, iar din punct de vedere grafic patratele (etapele) se inlocuiesc cu cercuri (pozitii). In etapa initiala A se pun o singura marca. Deoarece fiecare din cele trei tranzitii are un singur arc de intrare si un singur arc de iesire Reteaua Petri este de tip masina de stare. Graful asociat retelei Petri este conex deoarece din orice nod1 se poate ajunge in oricare alt nod, mai mult este tare conex deoarece aceasta performanta se realizeaza prin
intermediul unor arce orientate.
Teorema lui Commoner /15/ spune ca daca graful este tare conex atunci reteaua este viabila. Daca marcajul initial are o singura marca, cum este cazul aici, atunci reteaua este viabila si sigura. Analizand structura retelei se observa imediat ca nu exista conflicte structurale, deci reteaua Petri este conforma si echivalenta cu grafcetul. Toate concluziile pe care te obtinem lucrand cu reteaua Petri sunt valabile si pentru grafcet.
Analiza comportamentala. Tranzitia (1), validata initial, se declanseaza cand se apasa butonul de pornire si p=1. Devine activa etapa B si motorul porneste. La terminarea unei rotatii contactul traductorului este actionat de palpator si a=1. Tranzitia (2) se declanseaza si devine activa etapa C. Aceasta etapa nu este interpretata de nici o actiune noua. Motorul se roteste in continuare. Rostul acestei etape este sa memoreze ca a aparut evenimentul specific terminarii unei rotatii. Cama rotindu-se incet, la un moment dat palpatorul nu mai este impins
si contactul a nu mai este actionat. Expresia logica simpla care determina valoarea variabilei b va fi atunci egala cu unu (adevarat) si tranzitia (3) se declanseaza. Etapa A redevine activa. Exista deci un ciclu repetitiv care coincide cu algoritmul dorit pentru automatul sistemului.
Analiza comportamentala trebuie sa ia in considerare si alte situatii de functionare in afara de cea de baza. Ce se intampla daca motorul se roteste incet si dorim sa se opreasca. Vedem ca acest lucru nu este posibil. Conform caietului de sarcini motorul se roteste intotdeauna pana cand se termina o rotatie. Eventualele modificari ale caietului de sarcini se vor discuta o prima varianta a proiectului.
Metoda de programare Grafcet. Caietul de sarcini Grafcet din Fig. 7a) poate fi
implementat direct la unele automate programabile folosind o interfata grafica. Metoda este foarte utila in cazul automatelor complexe.
Metoda listei de instructiuni. Se foloseste reteaua Petri conforma care descrie
functionarea automatului. Pentru exemplul considerat aceasta este prezentata in Fig. 7 b). Metoda de proiectare are urmatoarele etape:
Etapa 1. Codificarea locatiilor cu ajutorul codului distribuit (1 din n). Rezultatul apare in Fig. 7b). Se observa ca fiecarei locatii ii corespunde un singur bit egal cu unu. Metoda de proiectare se bazeaza pe observatia ca acest bit poate fi implementat cu ajutorul unui automat elementar cu prioritate la pornire. Conditia de setare coincide cu conditia de activare a locatiei iar conditia de resetare coincide cu conditia de dezactivare a locatiei.
Etapa 2. Calculul conditiilor de setare si resetare a bitilor corespunzatori fiecarei etape. Setarea coincide cu activarea locatiei care are loc daca toate locatiile precedente sunt active si evenimentele care interpreteaza tranzitiile de la aceste locatii au aparut, adica au valoarea logica unu. Resetarea are loc daca locatia respectiva este activa si evenimentele care declanseaza tranzitiile posterioare tranzitiei au aparut. Exemplul studiat este mai simplu pentru ca fiecare locatie are cate o singura tranzitie precedenta si o singura tranzitie posterioara
Etapa 3. Determinarea relatiilor logice pentru locatiile active initial cu ajutorul
urmatoarei formule care provine din expresia automatului elementar cu prioritate la pornire:

Se calculeaza simplificarile posibile. In exemplul nostru este activa initial locatia A caracterizata de bitul cu n=0. Inlocuind conditiile (1) in (4) se obtine:
![]()
Etapa 4. Determinarea relatiilor logice pentru locatiile inactive la momentul de timp initial. Se foloseste tot o formula derivata din relatia logica a automatului elementar cu prioritate la pornire:

Pentru automatul din Fig. 7 b) locatiile B si C nu sunt active initial si aplicand formula precedenta pentru conditiile (3) si (3) se obtine:

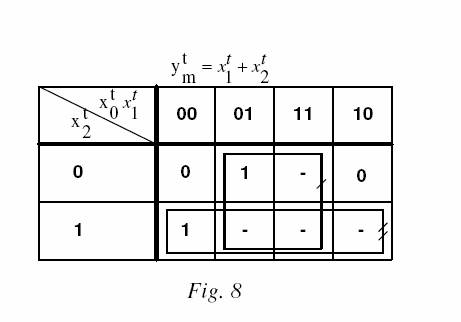
Etapa 5 Determinarea relatiilor logice dintre starile x si iesirile y ale automatului la momentul de timp t. Aceste relatii rezulta din reteaua Petri care specifica pentru fiecare locatie, caracterizata prin anumite valori ale variabilelor de stare x, care valorile variabilelor de iesire y. De exemplu, pentru reteaua Petri din Fig. 7 b) variabila de iesire ym care comanda motorul M are valoarea 1 numai pentru locatiile B si C. Diagrama Karnaugh corespunzatoare si relatia logica stabilita 2 sunt prezentate in Fig. 8
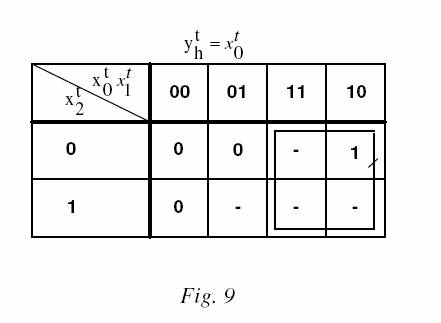
Din aceiasi retea Petri rezulta ca lampa H semnalizeaza numai in locatia A si deci numai atunci variabila de iesire corespunzatoare yh are valoarea 1. Relatia logica corespunzatoare determinata cu ajutorul diagramei Karnaugh este prezentata in Fig. 9.
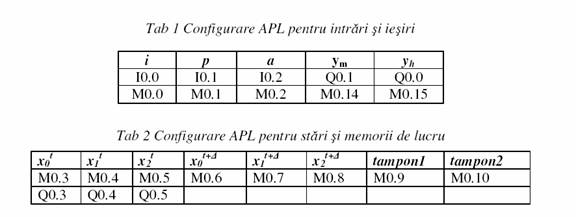
Etapa 6. Elaborarea tabelului de configurare. Se stabileste o corespondenta intre variabilele relatiilor logice si denumirile elementelor componente ale automatului programabil: intrari, iesiri, memorii (relee), timere (relee de timp), etc. Pentru exemplul considerat acestea apar in Tab 1 si Tab 2.
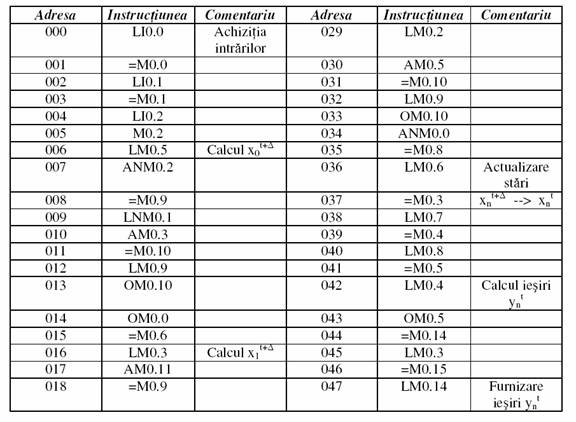
Etapa 7. Elaborarea programului de functionare a automatului programabil logic sub forma unei liste de instructiuni. Pentru exemplul studiat lista de instructiuni corespunzatoare automatului programabil logic Klockner Moeller PS3 este prezentata in Tab 3. Se observa ca programul are urmatoarele sectiuni:
_ Achizitia intrarilor (Input scan)
_ Calculul relatiilor logice (Logic scan)
_ Actualizarea variabilelor de stare
_ Calculul variabilelor de iesire
_ Furnizarea iesirilor (Output scan)
_ Operatiuni de semnalizare sau testare
Tab 3 Programul sub forma de lista de instructiuni
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3687
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved