| CATEGORII DOCUMENTE |
| Astronomie | Biofizica | Biologie | Botanica | Carti | Chimie | Copii |
| Educatie civica | Fabule ghicitori | Fizica | Gramatica | Joc | Literatura romana | Logica |
| Matematica | Poezii | Psihologie psihiatrie | Sociologie |
MISCAREA GENERALA A SOLIDULUI RIGID
1. PARAMETRII DE POZITIE AI UNUI RIGID IN MISCARE GENERALA
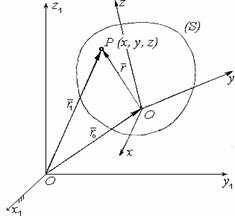
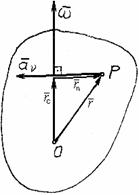
Cunoasterea cinematicii unui rigid inseamna determinarea miscarii unui punct arbitrar P al sau (fig. 1). Pentru precizarea pozitiei punctului P in solid, se raporteaza acest punct la un reper
|
Fig.
1 |
Oxyz solidar legat de rigid (deci mobil):
![]() , (1)
, (1)
in care x y z sunt constante si ![]() sunt functii de timp.
sunt functii de timp.
Prin introducerea acestui nou reper, studiul miscarii generale a solidului
se reduce la studiul miscarii sistemului mobil in raport cu sistemul fix O1 x1 y1 z1
[(S) este reprezentat prin Oxyz], pozitia in spatiu - la un moment
dat - a primului reper in raport cu al doilea fiind determinata prin: ![]() , (2)
, (2)
precum si prin cele 9
cosinusuri directoare ale axelor reperului mobil in raport cu axele fixe, intre
care exista 6 relatii (demo: in carte); ca urmare numai 3
dintre cele 9 cosinusuri sunt independente. Se obisnuieste ca in locul acestor
3 parametri (unghiuri) independenti sa se utilizeze alte 3 unghiuri, numite
UNGHIURILE LUI EULER, care precizeaza direct orientarile axelor mobile fata de
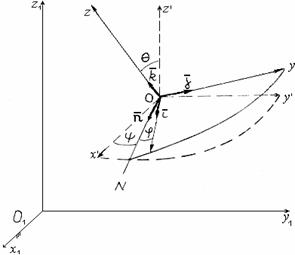
un nou reper Ox'y'z', cu axele paralele la axele reperului fix;
intersectia planelor de coordonate Oxy
si Ox'y' este ON, numita dreapta nodurilor,
de versor ![]() (fig. 2).
(fig. 2).
|
Fig.
2 |
Unghiurile lui Euler sunt:
- unghiul de precesie y = x'ON, format de ON cu Ox', reprezentand o rotire in jurul lui Oz' (ON se obtine rotind pe Ox' cu unghiuly in jurul lui Oz');
- unghiul de nutatie q = z'Oz, dintre Oz' si Oz, obtinut prin rotirea lui Oz' in jurul lui ON.
- unghiul de rotatie proprie j = xON, format de Ox cu ON, fiind o rotire in jurul lui Oz, a lui ON.
De la sistemul Ox'y'z' se poate ajunge la Oxyz prin 3 rotatii succesive, efectuate in ordinea: y (in jurul lui Oz'); q (ON); j (Oz).
Marimile x0 , y0 , z0 , y q si j, care determina complet pozitia reperului mobil in raport cu cel
fix, poarta numele de parametri de pozitie ai rigidului. In timpul miscarii aceste marimi vor fi functii de timp:
x0 = x0 (t) ; y0 = y0 (t ) ; z0 = z0 (t) ; y y (t) q q (t) si j j (t)
numindu-se ecuatiile miscarii rigidului.
2. DEPLASARILE ELEMENTARE GENERALE ALE RIGIDULUI
Acestea sunt deplasari care se produc intre doua cadre consecutive ale filmului miscarii.
Variatiile elementare dx0 , dy0 , dz0 , dy , dq , dj corespunzatoare variatiei dt a timpului in (4), permit definirea a doua marimi vectoriale numite deplasari elementare ale rigidului.
a)- Vectorul 'translatie elementara' a rigidului: d![]() 1 = dx0
1 = dx0 ![]() 1 + dy0
1 + dy0![]() 1 + dz0
1 + dz0 ![]() 1 ,(6)
1 ,(6)
obtinut prin diferentierea relatiei (2), unghiurile lui Euler ramanand constante, deci axele x y z raman paralele cu ele insele.
b)- Vectorul "rotatie elementara" (instantanee) a rigidului
Consideram acum coordonatele lui O constante si variaza numai unghiurile lui Euler (ca la un solid cu punct fix).
b.1)- Vectorii rotatii elementare corespunzatori variatiei numai unui unghi Euler (ex.: miscarea usii). In acest caz punctele rigidului descriu arce de cerc cuprinse in plane paralele la planul unghiului variabil si cu centrele situate pe normala in O la acest plan. Din acest motiv, variatia elementara a unghiului Euler poate fi reprezentata - conventional - printr-un VECTOR ROTATIE ELEMENTARA, avand ca suport normala definita mai sus si sensul ales dupa regula surubului.
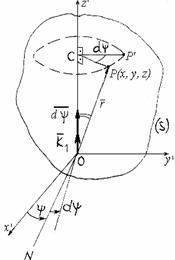
Cazul I - Variaza numai unghiul de precesie y y (t) (fig. 3); axa Oz' ramane fixa in spatiu,
|
Fig.
3 |
deci j const., q const.
Un punct arbitrar P descrie un cerc de raza CP (demo: in carte)
La variatia dy a unghiului de precesie, solidul executa o rotatie elementara in jurul
axei Oz', determinata prin vectorul
rotatie elementara de precesie: ![]() . (9)
. (9)
Cazul II q q (t); dreapta nodurilor ramane fixa in spatiu
y = const.; j const.).
Analog se introduce vectorul rotatie elementara de nutatie:
![]() . (10)
. (10)
Cazul III j j (t); axa Oz ramane fixa in spatiu
y = const.; q const.).
Analog se defineste vectorul rotatie elementara proprie:
![]() . (11)
. (11)
Expresia variatiei d![]() a vectorului de pozitie al unui punct arbitrar P(
a vectorului de pozitie al unui punct arbitrar P(![]() ) al rigidului, la variatia elementara a unui unghi Euler [notat cu c ('hi')] (fig. 4)
) al rigidului, la variatia elementara a unui unghi Euler [notat cu c ('hi')] (fig. 4)
|
Fig.
4 |
![]() (demo: in carte)
(demo: in carte)
Se regaseste faptul indicat de relatia (3.1.17) si anume ca d![]() este coliniar cu
este coliniar cu ![]() (sau cu
(sau cu ![]() ).
).
b.2)- Vectorul rotatie elementara instantanee, corespunzator variatiei tuturor unghiurilor lui Euler.
TEOREMA: 'Doua rotatii elementare, determinate prin vectorii ![]() si
si![]() pot fi inlocuite cu o rotatie elementara unica, avand
vectorul rotatie
pot fi inlocuite cu o rotatie elementara unica, avand
vectorul rotatie ![]() (16)
(16)
(deci regula paralelogramului se aplica si in cazul rotatiilor elementare)''. Demo: in carte
Introducand vectorul rezultant: ![]() , (19)
, (19)
expresiile (17 si 18) se pot scrie: ![]() , (20')
, (20')
adica se poate considera ca rigidul ar efectua o singura rotatie elementara,
determinata prin vectorul ![]() .
.
Aceasta concluzie se extinde imediat la un numar oarecare (determinat) de vectori rotatii elementare si - in particular - la cazul celor trei vectori rotatii elementare corespunzatoare variatiilor tuturor unghiurilor lui Euler:
![]() , (21)
, (21)
![]() numindu-se vectorul
rotatie elementara (instantanee) a rigidului, iar:
numindu-se vectorul
rotatie elementara (instantanee) a rigidului, iar:
![]() . (20)
. (20)
3. PARAMETRI CINEMATICI AI MISCARII GENERALE A SOLIDULUI
a)- Viteza de translatie a rigidului: ![]() , (22)
, (22)
avand in vedere relatia (2)
b)- Viteza unghiulara instantanee:
![]()
![]()
Din relatia (20) rezulta: ![]() , (24)
, (24)
cu formele
particulare: ![]() ,
,
numite formulele lui POISSON.
c)- Acceleratia de translatie: ![]() . (26)
. (26)
d)- Acceleratia unghiulara instantanee: ![]() . (27)
. (27)
|
Fig.
8 |
4. DISTRIBUTIA VITEZELOR
Se deriveaza in raport cu timpul relatia evidenta (fig. 1):
![]() 1 =
1 = ![]() O +
O + ![]() ; (30)
; (30)
![]() . (31)
. (31)
Semnificatia termenilor din (31):
![]() . (32)
. (32)
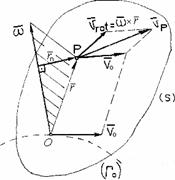
Avand in vedere (32), (31) devine:
![]() , (33)
, (33)
relatie ilustrata in figura 8, in care ![]() este un vector
perpendicular pe planul determinat de vectorii
este un vector
perpendicular pe planul determinat de vectorii![]() si
si![]() .
.
Se observa usor ca ![]() , unde
, unde![]()
![]()
5. DISTRIBUTIA ACCELERATIILOR
Derivam in raport cu timpul relatia (33): ![]() , (34)
, (34)
unde: ![]() ;
;
avand in vedere si (32), relatia (34) devine:
![]() , (35)
, (35)
unde s-a notat acceleratia tangentiala ![]() (36)
(36)
si aceleratia normala ![]() . (37)
. (37)
Avand in vedere analogia relatiilor (36 si 32), ![]() se deseneaza analog cu
se deseneaza analog cu
![]() , in locul vectorului
, in locul vectorului![]() utilizand
utilizand![]() , unde
, unde![]() .
.
|
Fig.
9 |
Vom demonstra ca acceleratia normala este orientata pe![]() (normal din P la
vectorul
(normal din P la
vectorul![]() ) (fig. 9):
) (fig. 9):
Se observa ca ![]() , iar
, iar

(38)
6. PROPRIETATI ALE MISCARII
a) - Vectorul viteza unghiulara![]() a unui solid in miscare generala este un vector liber
(nu depinde de punctul ales in solid ca origine a sistemului de axe mobil). Demo: in carte.
a unui solid in miscare generala este un vector liber
(nu depinde de punctul ales in solid ca origine a sistemului de axe mobil). Demo: in carte.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1816
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved