| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Compromisul complexitate-distorsiune in potrivirea vectoriala pe baza tehnicilor probabilistice de distanta partiala
Multe aplicatii de compresie cu pierderi solicita codorului sa efectueze potrivirea vectoriala. Un exemplu clasic este cuantizarea vectoriala in care se urmareste a se determina pentru fiecare vector de intrare cea mai buna potrivire dintre toti vectorii unui dictionar (set de vectori). Complexitatea cautarii depinde atat de dimensiunea vectorilor cat si de marimea dictionarului. Un alt exemplu de potrivire vectoriala il reprezinta estimarea miscarii in codarea video. In acest caz se urmareste a se gasi pentru fiecare bloc-imagine din cadrul video curent cea mai buna potrivire cu blocurile-imagine dintr-o regiune de cautare prestabilita din cadrul anterior. Informatia despre cea mai buna potrivire este trimisa catre decodor sub forma unui vector de miscare.
Atat in cuantizarea vectoriala cat si in estimarea miscarii, potrivirea unui bloc-imagine (vector) cu unul existent intr-un dictionar (set de vectori) se realizeaza prin calcularea unei distante (metrice) dintre blocul din intrare si toate blocurile (vectorii) din setul de cod sau toate blocurile posibile dintr-o regiune prestabilita a cadrului video.
In cazul cuantizarii vectoriale metrica (distanta) folosita in majoritatea aplicatiilor este distanta euclidiana dintre vectorul de intrare si vectorul de cod:
![]() (1)
(1)
unde ![]() este vectorul de dimensiune
este vectorul de dimensiune ![]() ce urmeaza a fi cuantizat, iar
ce urmeaza a fi cuantizat, iar ![]() este vectorul de cod continut in setul de
vectori de cod
este vectorul de cod continut in setul de
vectori de cod ![]() . Astfel,
. Astfel, ![]() este vectorul de cod a lui
este vectorul de cod a lui ![]() daca:
daca:
![]() (2)
(2)
In cazul estimarii miscarii, datorita efortului computational redus pentru calculul acesteia, s-a impus o metrica denumita suma diferentelor absolute (SDA). SDA pentru un vector de miscare se defineste ca fiind:
![]() (3)
(3)
unde ![]() este nivelul de intensitate a pixelului
este nivelul de intensitate a pixelului ![]() din cadrul
din cadrul ![]() ,
, ![]() este setul de pixeli din blocul ce urmeaza a
fi codat iar
este setul de pixeli din blocul ce urmeaza a
fi codat iar ![]() , unde
, unde ![]() este domeniul prestabilit in care poate varia
vectorul de miscare. De exemplu, o valoare tipica pentru
este domeniul prestabilit in care poate varia
vectorul de miscare. De exemplu, o valoare tipica pentru![]() poate fi
regiunea definita de intervalul
poate fi
regiunea definita de intervalul ![]() . Daca SDA
este normalizat cu cardinalul unui bloc-imagine,
. Daca SDA
este normalizat cu cardinalul unui bloc-imagine, ![]() , noua
valoare poarta numele de media
diferentelor absolute (MDA).
, noua
valoare poarta numele de media
diferentelor absolute (MDA).
Complexitatea calculului metricei determina complexitatea algoritmului. In principiu, pentru a realiza cea mai buna potrivire, un sistem de codare trebuie sa calculeze toate distantele intre un vector (bloc) de intrare si toti vectorii de cod (in cazul cuantizarii vectoriale) sau toate blocurile posibile (vectorilor de miscare) in cazul estimarii miscarii. Complexitatea algoritmului va depinde de trei factori:
i) numarul de vectori de cod din setul de vectori de cod, respectiv, numarul de blocuri-imagine ce trebuie testati pentru a gasi cea mai buna potrivire;
ii) metrica folosita, distanta euclidiana sau SDA;
iii)
dimensiunea ![]() a vectorului, respectiv, a blocului.
a vectorului, respectiv, a blocului.
Astfel, evaluarea si proiectarea unei tehnici de potrivire atat pentru cuantizarea vectoriala cat si pentru estimarea miscarii necesita evaluarea si reducerea complexitatii algoritmului utilizat.
Complexitatea algoritmului poate fi redusa prin:
i) reducerea numarului de vectori de cod, respectiv a vectorilor de miscare ce trebuie comparati cu vectorul de intrare;
ii) reducerea numarului de operatii elementare (multiplicari-M, adunari-A si comparatii-C) necesare calcularii distantei dintre doi vectori sau doua blocuri. Se mentioneaza ca numarul de operatii elementare depinde de metrica adoptata precum si de dimensiunea vectorilor, respectiv, a blocurilor imagine implicate.
Ansamblul de tehnici care se ocupa de cuantizarea vectoriala formeaza tehnicile de cautare rapida (CR), iar grupul de tehnici care se ocupa de cautarea celui mai apropiat bloc-imagine pentru un bloc dat poarta numele de tehnici de potrivire rapida (PR). Cele doua tehnici pot fi proiectate astfel incat sa genereze acelasi rezultat ca si cautarea exhaustiva sau, ca alternativa, sa genereze un rezultat suboptimal (ceea ce inseamna ca tehnica adoptata sa genereze un vector de cod sau un bloc care nu este cel mai apropiat in spatiul k-dimensional, dar care se gaseste cu o probabilitate mare intr-o zona restransa din jurul vectorului din intrare). Cea de a doua solutie introduce un factor suplimentar de distorsiune, dar poate cauza o reducere a complexitatii algoritmului de cautare. Tehnicile care gasesc potrivirea perfecta, adica vectorul cu distanta minima fata de vectorul de intrare, se numesc tehnici optimale.
Algoritmii de cautare rapida (CR) se bazeaza pe cautarea a mai putine puncte in interiorul regiunii de cautare prin impunerea unei strategii de cautare. Restrangerea domeniului de cautare se face prin eliminarea, prin operatii cat mai putine, a acelor vectori de cod care nu pot fi in apropierea vectorului de intrare. Un vector de cod se considera a nu fi apropiat de vectorul de intrare daca distanta dintre vectorul de intrare si acel vector de cod este mai mare decat o distanta deja calculata intre vectorul de intrare si un alt vector de cod. Mai mult, un algoritm de cautare bun este un algoritm pentru care rutina de cautare incepe de la un vector de cod cat mai apropiat de vectorul de intrare. Cautarea poate fi oprita atunci cand a fost gasit un candidat destul de bun pentru potrivire. Majoritatea tehnicilor de cautare pentru estimarea miscarii sunt suboptimale, ceea ce inseamna ca nu gasesc cea mai buna potrivire pentru blocul-imagine de referinta. Printr-o usoara crestere a distorsiunii introduse de sistemul de codare, se poate reduce substantial efortul de calcul necesar cautarii si, in consecinta, a timpului mediu de codare a unei secvente video. In literatura din ultimii ani exista numeroase exemple de algoritmi de cautare rapida pentru estimarea miscarii.
In cazul cuantizarii vectoriale, in tehnicile de cautare rapida optimale, vectorii de cod care nu sunt apropiati de vectorul din intrare sunt eliminati primii, apoi se efectueaza cautarea exhaustiva asupra celor ramasi. O alta posibilitate este aceea de a construi un dictionar cu o structura care sa permita cautarea rapida. Un criteriu determinist se defineste ca fiind un criteriu dupa care, cu probabilitate unu, vectorul de cod corespunzator distantei minime nu se afla in setul de vectori eliminati. O alta metoda care reduce substantial cautarea se bazeaza pe algoritmii de cautare intr-o structura sub forma de arbore. Dezavantajul acesteia este acela ca proiectarea setului de vectori de cod poate fi complicata si suboptimala din perspectiva distorsiunii medii.
Desi metodele de cautare rapida sunt vast tratate in literatura, mai putina atentie a fost acordata tehnicilor de potrivire rapida a vectorilor de miscare.
Pentru compensarea miscarii se poate utiliza un algoritm de cautare dupa distanta partiala ce utilizeaza ca metrica suma diferentelor absolute (SDA). Spre deosebire de cuantizarea vectoriala, unde se utilizeaza distanta euclidiana, aceasta metrica poate reduce si mai mult timpul de cautare cu o usoara degradare a performantelor codarii din perspectiva fidelitatii secventelor video. De altfel, aceasta metrica a fost implementata cu succes in multe sisteme video de codare prin soft. Alte tehnici de cautare ce utilizeaza SDA se bazeaza pe reducerea numarului de pixeli folositi pentru a calcula SDA prin decimarea pixelilor din macrobloc.
2. Metode deterministe de cautare rapida pentru estimarea miscarii
Ideea de baza este aceea de a compara
un calcul incomplet al distantei cu "cea mai buna distanta gasita pana acum", in timp ce procesul de
calcul inca nu s-a terminat. Pe baza monotoniei distantei, (distanta totala
creste cu dimensiunea), calculul se poate termina daca distanta partiala este
deja mai mare decat "cea mai buna distanta gasita pana in acum". Astfel, cuvantul de cod curent nu poate fi solutia
optima si se trece la evaluarea urmatorului cuvant de cod. Aplicarea tehnicii
bazate pe distanta partiala pentru cuantizarea vectoriala si estimarea miscarii
se formuleaza dupa cum urmeaza. Se defineste distanta partiala intre intrarea ![]() si cuvintul de cod
si cuvintul de cod ![]() cu relatia
cu relatia ![]() , adica suma
patratelor diferentelor pana la
, adica suma
patratelor diferentelor pana la ![]() dintre vectorul
dintre vectorul ![]() si cuvantul de cod
si cuvantul de cod ![]() . Este
evident ca
. Este
evident ca ![]() pentru
pentru ![]() .
.
In continuare, se defineste
cuvantul de cod "cel mai bun pana in prezent" ![]() pentru vectorul de intrare
pentru vectorul de intrare ![]() cu distantele corespunzatoare
cu distantele corespunzatoare ![]() ca fiind
ca fiind ![]() .
. ![]() este submultimea cuvintelor de cod din
dictionarul
este submultimea cuvintelor de cod din
dictionarul ![]() , a caror
distanta fata de
, a caror
distanta fata de ![]() a fost testata.
a fost testata.
Similar, in cazul estimarii miscarii,
calculul SDA partiale poate fi definit prin impartirea multimii ![]() in k submultimi
in k submultimi
![]() , unde
, unde ![]() pentru
pentru ![]() si
si ![]() . Prin
urmare, SDA partiala calculata in iteratia
. Prin
urmare, SDA partiala calculata in iteratia ![]() pentru blocul
pentru blocul ![]() cu vectorul de miscare
cu vectorul de miscare ![]() este
este ![]() si
si ![]() .
.
"Cel mai bun pana in prezent" vector
de miscare ![]() pentru blocul
pentru blocul ![]() este
este ![]() .
.
Suma distantelor absolute
corespunzatoare, ![]() , se
defineste similar. Multimea
, se
defineste similar. Multimea ![]() este analoga multimii
este analoga multimii ![]() , adica
include blocurile ce au fost testate pana in acel moment.
, adica
include blocurile ce au fost testate pana in acel moment.
In continuare se prezinta algoritmul distantei partiale pentru estimarea miscarii. Algoritmul pentru cuantizarea vectoriala este similar.
Algoritm de cautare dupa distanta partiala
Pas 1: La inceputul rutinei de cautare, pentru un bloc-imagine dat in
intrare, se initializeaza ![]() cu o valoare mare, iar vectorul de miscare
optim
cu o valoare mare, iar vectorul de miscare
optim ![]() .
.
Pas 2: Se trece la urmatorul vector de miscare din regiunea de cautare. ![]() . Daca
numarul vectorilor din regiunea de cautare ce au ramas de evaluat este zero, se
returneaza vectorul de miscare optim
. Daca
numarul vectorilor din regiunea de cautare ce au ramas de evaluat este zero, se
returneaza vectorul de miscare optim ![]() .
.
Pas 3: Se calculeaza ![]() .
.
Pas 4: Daca ![]() se trece la Pas 5, altfel se trece la Pas 3.
se trece la Pas 5, altfel se trece la Pas 3.
Pas 5: Daca ![]() se trece la Pas 2, altfel
se trece la Pas 2, altfel ![]() si se trece la Pas 3.
si se trece la Pas 3.
Pas 6: Daca ![]() ,
, ![]() si
si ![]() , se trece
la Pas 2.
, se trece
la Pas 2.
Reducerea complexitatii
algoritmului de cautare expus se datoreaza pasului 5 unde se opreste calculul
distantei in momentul in care distanta partiala calculata depaseste "cea mai
buna distanta pana in prezent". Aceasta reducere a complexitatii este
dependenta de statistica vectorilor din intrare si de statistica vectorilor din
regiunea in care se face cautarea. De asemenea aceasta tehnica de cautare este
dependenta de modul in care se aleg vectorii de miscare la Pas 2 si de valoarea
initiala a lui ![]() . Performantele algoritmului
pot fi imbunatatite daca se utilizeaza in prealabil o proiectie pe componentele
principale si daca vectorii de cod sunt aranjati in ordinea descrescatoare a
probabilitatii lor de aparitie. In general, cu cat o
tehnica de cautare rapida este mai eficienta, cu atat timpul de codare obtinut
prin gasirea cu testare determinista a celui mai potrivit bloc va fi mai mic.
. Performantele algoritmului
pot fi imbunatatite daca se utilizeaza in prealabil o proiectie pe componentele
principale si daca vectorii de cod sunt aranjati in ordinea descrescatoare a
probabilitatii lor de aparitie. In general, cu cat o
tehnica de cautare rapida este mai eficienta, cu atat timpul de codare obtinut
prin gasirea cu testare determinista a celui mai potrivit bloc va fi mai mic.
3. Potrivirea rapida prin testarea ipotezelor
Un dezavantaj al potrivirii
rapide prin testare determinista este acela ca nu prezinta accesibilitate
computationala, adica nu permite obtinerea unei solutii rapide cu pretul unei
oarecare reduceri a calitatii. In continuare se investigheaza algoritmi care
prezinta accesibilitate computationala, adica reducerea graduala a
complexitatii se face cu pretul reducerii corespunzatoare a potrivirii
calitatii. Acesti algoritmi se bazeaza pe metoda potrivirii rapide prin
testarea ipotezelor care utilizeaza ipoteze de test pentru a decide cand se
termina cautarea la pasul 5 din algoritmul anterior. Ideea de baza este de a
estima intai metrica distanta din distanta partiala calculata la iteratia ![]() . Diferenta
dintre distanta actuala si cea estimata poate fi modelata ca o variabila
aleatoare cu o anumita functie densitate de probabilitate. Suplimentar testarii
distantelor partiale se poate adauga o regula de decizie pentru a determina
daca estimatul bazat pe distanta partiala permite luarea deciziei ca distanta
finala totala este mai mare decat distanta "cea mai buna pana in prezent".
Aceasta decizie se ia tinand cont de faptul ca estimatul este demn de
incredere, asa cum s-a determinat din modelul de probabilitate. Daca estimatul
prezinta suficienta incredere, cautarea se termina. In caz contrar, se continua
calculul metricei la iteratia urmatoare (cea include o crestere a dimensiunii
vectorilor). In acest fel potrivirea rapida prin testarea ipotezelor combina
testul distantei partiale si testul ipotezelor.
. Diferenta
dintre distanta actuala si cea estimata poate fi modelata ca o variabila
aleatoare cu o anumita functie densitate de probabilitate. Suplimentar testarii
distantelor partiale se poate adauga o regula de decizie pentru a determina
daca estimatul bazat pe distanta partiala permite luarea deciziei ca distanta
finala totala este mai mare decat distanta "cea mai buna pana in prezent".
Aceasta decizie se ia tinand cont de faptul ca estimatul este demn de
incredere, asa cum s-a determinat din modelul de probabilitate. Daca estimatul
prezinta suficienta incredere, cautarea se termina. In caz contrar, se continua
calculul metricei la iteratia urmatoare (cea include o crestere a dimensiunii
vectorilor). In acest fel potrivirea rapida prin testarea ipotezelor combina
testul distantei partiale si testul ipotezelor.
In continuare se prezinta doua aplicatii de potrivire rapida prin testarea ipotezelor la estimarea miscarii si cuantizarea vectoriala.
Rezultate experimentale
1. Estimarea miscarii
In cele ce urmeaza, se considera
media diferentelor absolute (MDA) drept metrica. Astfel "cea mai buna pana in
prezent" MDA si MDA partiala corespunzatoare iteratiei ![]() se definesc cu relatiile
se definesc cu relatiile  si, respectiv,
si, respectiv, ![]() , unde
, unde ![]() reprezinta cardinalul multimii. Se pleaca de
la exprimarea estimatului mediei diferentelor absolute din media partiala a
diferentelor absolute. Considerand distanta si distantele partiale ca procese
aleatoare, cea mai buna estimare in sensul mediei patratice este valoarea medie
a distantei in functie de distanta partiala, adica
reprezinta cardinalul multimii. Se pleaca de
la exprimarea estimatului mediei diferentelor absolute din media partiala a
diferentelor absolute. Considerand distanta si distantele partiale ca procese
aleatoare, cea mai buna estimare in sensul mediei patratice este valoarea medie
a distantei in functie de distanta partiala, adica ![]() . Din
observatiile experimentale
. Din
observatiile experimentale ![]() poate fi aproximat de
poate fi aproximat de ![]() , cu eroarea
de estimare
, cu eroarea
de estimare ![]() devenind din ce in ce mai mica cu cresterea
lui
devenind din ce in ce mai mica cu cresterea
lui ![]() , dupa cum
se vede in figura 1. Aceasta figura arata
histogramele dintr-o secventa tipica de erori de estimare
, dupa cum
se vede in figura 1. Aceasta figura arata
histogramele dintr-o secventa tipica de erori de estimare ![]() la diverse valori ale lui
la diverse valori ale lui ![]() unde
unde ![]() a fost partitionat in 16 submultimi
a fost partitionat in 16 submultimi ![]() .
. ![]() este multimea pixelilor din primele i randuri ale macroblocului.
este multimea pixelilor din primele i randuri ale macroblocului.
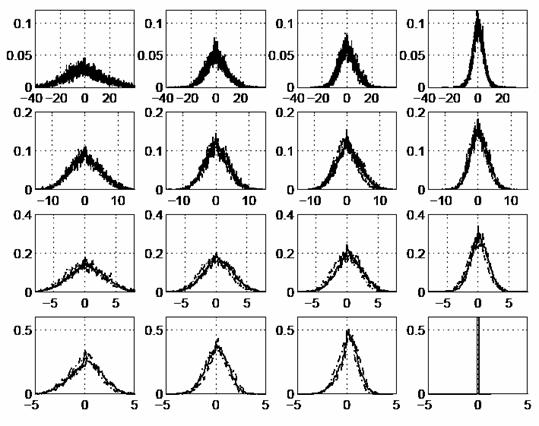
Figura 1. Histogramele erorii de estimare
folosind ![]() ca un estimat pentru
ca un estimat pentru ![]() in 16 iteratii parcurse de la stanga la
dreapta si de sus in jos
in 16 iteratii parcurse de la stanga la
dreapta si de sus in jos
Intuitiv, ar putea fi evident ca, asa cum confirma experimentele, cu cat se folosesc mai multi pixeli cu atat acuratetea estimarii este mai buna, in medie, pentru estimarea cu SDA. Prin urmare se va obtine cel mai bun vector de miscare daca se foloseste numai SDA partiala. Mai mult, histogramele rezultate pot fi vazute ca estimati ai functiei densitate de probabilitate ai erorii de estimare. Pentru estimarea miscarii, in cele mai multe cazuri, functia densitate de probabilitate poate fi bine aproximata de distributia laplaciana.
In continuare se prezinta o
procedura de proiectare a regulii de decizie pentru testarea ipotezelor. Date
fiind ![]() si
si ![]() se doreste a se decide intre doua ipoteze:
se doreste a se decide intre doua ipoteze:
i)
exista o mare probabilitate ca ![]() final sa fie mai mare decat
final sa fie mai mare decat ![]() curent si sa se opreasca calculul sau
curent si sa se opreasca calculul sau
ii)
nu se dispune de un estimat
suficient de demn de incredere si se calculeaza ![]() , adica se
trece la iteratia
, adica se
trece la iteratia ![]() pentru metrica si se testeaza din nou.
pentru metrica si se testeaza din nou.
Dat fiind ![]() ipotezele sunt:
ipotezele sunt:
Parametrul care determina
performanta regulii de decizie este probabilitatea alarmei false, ![]() . Prin
urmare se pune problema gasirii regulii optime de decizie astfel incat
. Prin
urmare se pune problema gasirii regulii optime de decizie astfel incat ![]() unde
unde ![]() este probabilitatea limita aleasa pentru
alarma falsa.
este probabilitatea limita aleasa pentru
alarma falsa.
Conditia ![]() poate fi scrisa astfel:
poate fi scrisa astfel:
![]()
si regula de decizie optimala este :
 (1)
(1)
Deoarece ![]() membrul stang al relatiei (1) poate fi scris
sub forma
membrul stang al relatiei (1) poate fi scris
sub forma ![]() . Membrul
drept este
. Membrul
drept este ![]() .
.
Regula de decizie devine
 (2)
(2)
unde ![]() este pragul.
este pragul.
Aceasta situatie este redata in figura 2.
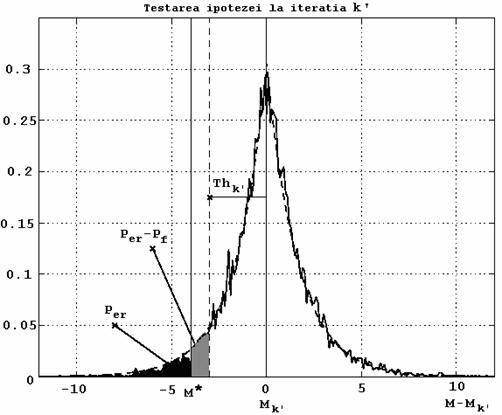
Figura 2. Histograma erorii de estimare obtinuta din datele de antrenare (cu linie continua) si modelarea parametrica (cu linie intrerupta)
Relatia (2) este adaugata
testului de distanta partiala din sectiunea precedenta. Folosind modelul
distributiei Laplace ![]() , unde
, unde ![]() este parametrul laplacian pentru iteratia
este parametrul laplacian pentru iteratia ![]() , pragul poate fi scris sub forma
, pragul poate fi scris sub forma
 (3)
(3)
In general, ipotezele de test se
pot proiecta diferit pentru fiecare iteratie, adica ![]() poate sa fie diferit pentru fiecare iteratie.
Pentru simplitate, insa, se impune
poate sa fie diferit pentru fiecare iteratie.
Pentru simplitate, insa, se impune ![]() constant pentru toate iteratiile
experimentului. Chiar pentru acelasi
constant pentru toate iteratiile
experimentului. Chiar pentru acelasi ![]() ,
, ![]() variaza in functie de
variaza in functie de ![]() de la fiecare iteratie. In experimentele
noastre se foloseste o aproximare rapida a parametrilor care estimeaza adaptiv
de la fiecare iteratie. In experimentele
noastre se foloseste o aproximare rapida a parametrilor care estimeaza adaptiv ![]() pentru fiecare 15 cadre.
pentru fiecare 15 cadre.
Metoda potrivirii rapide prin
testarea ipotezelor a fost aplicata la cautarea exhaustiva, cautarea
logaritmica 2-D si cautarea spatio-temporala corelata (ST1). Rezultatele
obtinute din aplicarea potrivirii rapide prin testarea ipotezelor sunt
prezentate in figurile 3 si 4, unde distorsiunea este energia blocurilor
reziduale, iar complexitatea se masoara atat in numarul de comparatii intre
pixeli cat si prin numarul de cicluri masina consumati in simulare. Drept
secvente de test au fost considerate secventele "calendarul mobil" si "fotbal".
Reprezentarea curbei complexitate - distorsiune se face in functie de
parametrul ![]() care ia valori intre 0.01 si 0.2.
care ia valori intre 0.01 si 0.2.
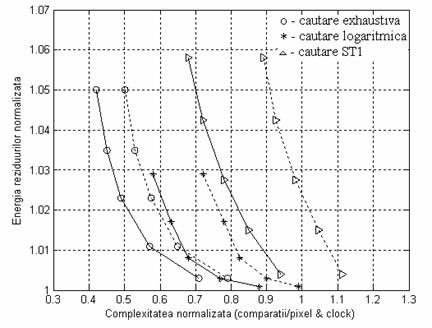
Fig. 3 Reprezentarea complexitate - distorsiune a 150 cadre pentru secventa "calendar mobil". Linie punctata - cicluri masina; linie continua - numarul de pixeli comparati
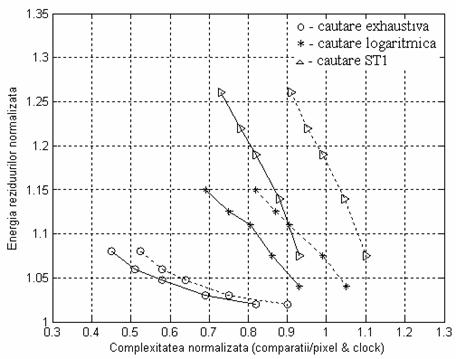
Fig. 4 Reprezentarea complexitate - distorsiune a 150 cadre pentru secventa "fotbal". Linie punctata - cicluri masina; linie continua - numarul de pixeli comparati
2. Cuantizarea vectoriala
Ca si in cazul estimarii miscarii, intai se
adopta metrica ![]() respectiv
respectiv ![]() . Primul
obiectiv este estimarea lui
. Primul
obiectiv este estimarea lui ![]() din
din ![]() . Apoi se
determina functia densitate de probabilitate a erorii de estimare si aceasta se
modeleaza astfel incat sa se poata proiecta regula de decizie pe baza testarii
ipotezelor care sa respecte probabilitatea impusa pentru alarma falsa. Ca si in
cazul estimarii miscarii, se ajunge la concluzia ca
. Apoi se
determina functia densitate de probabilitate a erorii de estimare si aceasta se
modeleaza astfel incat sa se poata proiecta regula de decizie pe baza testarii
ipotezelor care sa respecte probabilitatea impusa pentru alarma falsa. Ca si in
cazul estimarii miscarii, se ajunge la concluzia ca ![]() poate fi bine aproximat de
poate fi bine aproximat de ![]() . Pentru
simplitate, se poate aproxima, de asemenea, functia densitate de probabilitate
a erorii de estimare folosind functia de distributie laplaciana, ca in cazul
estimarii miscarii, si sa se proiecteze regula de decizie pe baza acestei
presupuneri. Parametrul laplacian in cazul cuantizarii vectoriale se obtine din
vectorii de antrenare. Rezultatul complexitate-distorsiune obtinut cu ajutorul
potrivirii rapide prin testarea ipotezelor este aratat in figura 5, care
prezinta rezultatul potrivirii rapide prin testare determinista la diferite
marime ale setului de vectori de cod ca si graficele corespunzatoare potrivirii
rapide prin testarea ipotezelor pentru o dimensiune a dictionarului (setului de
vectori) cu
. Pentru
simplitate, se poate aproxima, de asemenea, functia densitate de probabilitate
a erorii de estimare folosind functia de distributie laplaciana, ca in cazul
estimarii miscarii, si sa se proiecteze regula de decizie pe baza acestei
presupuneri. Parametrul laplacian in cazul cuantizarii vectoriale se obtine din
vectorii de antrenare. Rezultatul complexitate-distorsiune obtinut cu ajutorul
potrivirii rapide prin testarea ipotezelor este aratat in figura 5, care
prezinta rezultatul potrivirii rapide prin testare determinista la diferite
marime ale setului de vectori de cod ca si graficele corespunzatoare potrivirii
rapide prin testarea ipotezelor pentru o dimensiune a dictionarului (setului de
vectori) cu ![]() variind in domeniu 0.05-0.055. In figura 5
sursa este gaussiana cu vectorii generati independenti si identic distribuiti
(i.i.d.), de dispersie unitara.
variind in domeniu 0.05-0.055. In figura 5
sursa este gaussiana cu vectorii generati independenti si identic distribuiti
(i.i.d.), de dispersie unitara.
Fig. 5. Reprezentarea complexitate-distorsiune a cuantizarii vectoriale cu potrivirea rapida prin testarea ipotezelor pentru marimea vectorului egala cu 8 pentru o sursa i.i.d.
Se observa ca, spre deosebire de cazul estimarii miscarii in care marimea echivalenta a dictionarului este fixata prin regiunea de cautare, in cazul cautarii vectoriale, marimea dictionarului poate fi aleasa sa respecte cerintele complexitate-distorsiune. Se observa ca pentru a opera in modul computational accesibil, in cazul potrivirii rapide cu testare determinista marimea dictionarului trebuie sa fie modificata in timp ce accesibilitatea se obtine cu o marime constanta a dictionarului pentru cazul potrivirii rapide cu testarea ipotezelor. In figura 5 performantele complexitate-distorsiune obtinute cu potrivirea rapida prin testarea ipotezelor este aproximativ aceeasi cu cea obtinuta cu potrivirea rapida prin testare determinista, folosind marimi diferite ale dictionarului in cadrul unei anumite iteratii. Aceasta se datoreaza urmatorilor factori:
i) viteza obtinuta cu metoda potrivirii rapide cu testare determinista este deja mare, adica metoda este de trei patru ori mai rapida decat metoda traditionala MSE. Mai mult de 90% din calculele distantei sunt finalizate mai repede de algoritmul potrivirii rapide prin testare determinista si cele mai multe finalizari se produc in primele iteratii.
ii) metoda potrivirii rapide prin testarea ipotezelor introduce un cost suplimentar pentru testarea ipotezelor in timpul primelor iteratii. Oricum, numarul de terminari la primele iteratii este relativ mic in comparatie cu castigul general atins prin metoda testarii deterministe.
iii) dimensiunea vectorului in cazul estimarii vectoriale este de departe mai mica decat in cazul estimarii miscarii (1616).
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1125
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved