| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |

Sa se proiecteze un automat secvential pentru controlul evacuarii pieselor dintr-o presa.
Transferul produselor semifabricate intre doua masini de prelucrat ale unei linii automate este realizat, de cele mai multe ori printr-un sistem care permite manipularea adecvata a pieselor. Complexitatea manipulatorului, numarul de grade de libertate asociat miscarilor sale sunt legate nemijlocit de specificul sistemului de prelucrare deservit. Un astfel de manipulator este prezentat in Figura 1. Cele patru grade de libertate satisfac restrictiile impuse transferului unei piese semifabricate de la o masina de prelucrat la alta. In cazul de fata se va analiza transferul automat al pieselor obtinute intr-o presa hidraulica.
Manipulatorul utilizat realizeaza urmatoarele functii:
à Inchide sau deschide clestele;
à Roteste bratul;
à Deplaseaza axial bratul;
à Deplaseaza pe verticala intregul sistem de prindere.
Pentru delimitarea curselor, dispozitivul este prevazut cu un numar adecvat de limitatoare de capat de cursa.
Figura 1. Manipulator cu patru grade de libertate
Manipulatorul executa evacuarea pieselor de la o presa hidraulica la o banda transportoare care asigura transferul la alte masini pentru prelucrari ulterioare. Fazele de lucru ale dispozitivului sunt prezentate in figura 1:
Ø Initial, bratul manipulatorului se gaseste retras, cu clestele deschis (pozitia 1);
Ø In momentul in care se confirma terminarea operatiei de presare, poansonul presei in pozitie superioara (PPSUP), bratul avanseaza pana in dreptul piesei si clestele se inchide (pozitia 2);
Ø Bratul se retrage in pozitie initiala (pozitia 3);
Ø Dispozitivul se roteste (pozitia 4);
Ø Bratul avanseaza pana cand ajunge deasupra transportorului (pozitia 5);
Ø Bratul coboara la nivelul transportorului si deschide clestele (pozitia 6);
Ø Bratul se ridica (pozitia 7);
Ø Bratul se roteste si revine in pozitia initiala.
Variabilele de intrare sunt date de :
Ø Cele sase limitatoare de pozitie X1, X2, ., X6 ale sistemului de deplasare;
Ø Cele doua limitatoare CLI si CLD care indica pozitia inchis sau deschis a clestelui;
Ø Limitatorul care indica pozitia superioara a poansonului presei (PPSUP).
Functiile de iesire care determina actionarea sistemului sunt urmatoarele:
Ø AB, RB - avansul si retragerea bratului;
Ø RDB, RSB - rotatia bratului, dreapta respectiv stanga;
Ø RIDB, COBB - ridicarea si coborarea bratului;
Ø ICL, DCL - inchiderea si deschiderea clestelui.
Secventele de lucru ale manipulatorului, intr-un ciclu complet, sunt:
![]()
![]() AB=1
AB=1
![]() ICL=1
ICL=1
![]() RB=1
RB=1
![]() RSB=1
RSB=1
![]() AB=1
AB=1
![]() COBB=1
COBB=1
![]() DCL=1
DCL=1
![]() RIDB=1
RIDB=1
![]() RDB=1
RDB=1
Proiectul va cuprinde urmatoarele puncte:
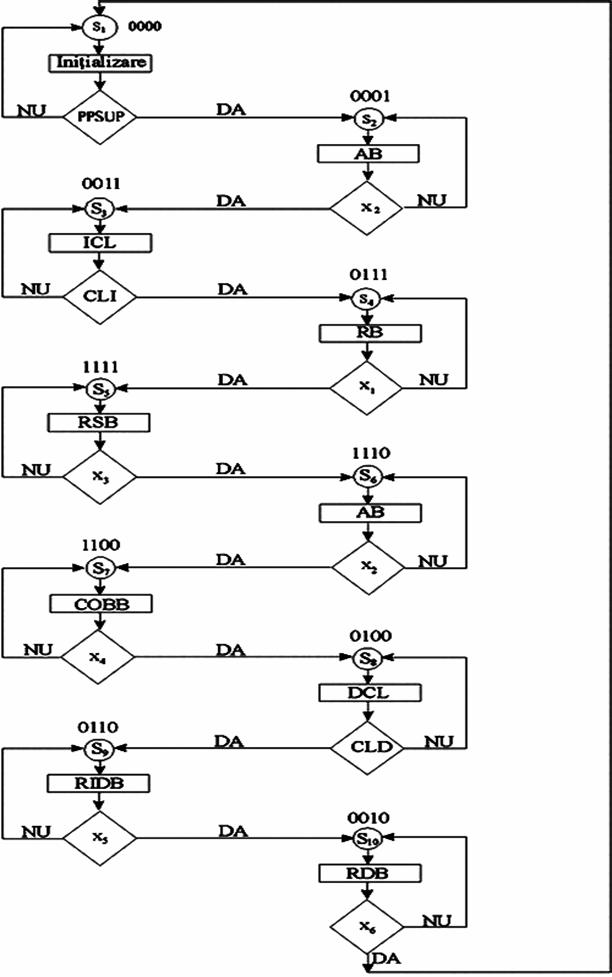
Ø Obtinerea diagramei starilor si a organigramei
Ø Codificarea starilor
Ø Intocmirea matricelor tranzitiilor si determinarea functiilor de excitatie
Ø Intocmirea matricelor iesirilor si determinarea functiilor de iesire
Ø Implementarea schemei cu relee si contacte electrice
Ø Concluzii
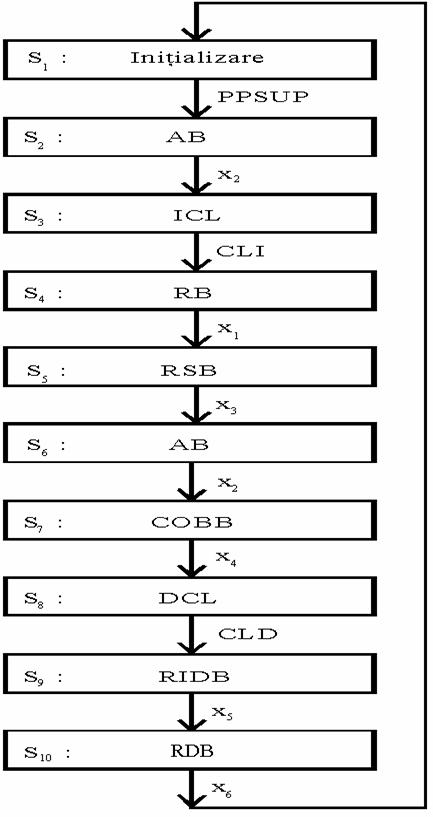
Figura 2. Diagrama starilor
B. Codificarea starilor
In codificare se urmareste ca:
automatul sa functioneze corect;
sa se obtina o schema logica a generatorului noi stari si a sectiunii functiilor logice de complexitate cat mai redusa la un pret de cost cat mai mic.
Functionarea corecta : - eliminarea oricaror situatii de functionare defectuoasa, situatii datorate unor semnale gresite, la baza acestora aflandu-se ori intrari ori decizii asincrone.
In cazul nostru toate cele 9 intrari (X1, X2, ., X6; CLI ;CLD si PPSUP) sunt asincrone, deci cu siguranta apar niste tranzitii gresite; dar acestea vor fi corectate.
Un automat realizeaza tranzitii corecte daca este caracterizat de un regim stationar (stabil) inaintea sosirii impulsului de sincronizare. Prezenta unor intrari asincrone care se pot modifica aleatoriu (chiar si in timpul regimului stationar) genereaza incertitudine in ceea ce priveste stabilirea excitatiilor Y1, Y2, Y3 sau Y4 in momentul sosirii impulsului de sincronizare Þ comutari incomplete Þ tranzitii incorecte.
Doua cai rezultate din caile iesire ale unei intrari asincrone trebuie sa fie codificate adiacente.
Trebuie avute in vedere mai multe aspecte pentru o functionare corecta :
eliminarea impulsurilor false care pot aparea in expresiile functiilor de iesire;
eliminarea impulsurilor false din intrari si iesiri determinate de hazardul static si dinamic erori specifice partii combinationale ce se elimina prin introducerea unor termeni redundanti respectiv prin introducerea unor inele redundante in diagramele Karnaugh corespunzatoare.
|
Y1 |
Y2 |
Y3 |
Y4 |
|
|
S1 | ||||
|
S2 | ||||
|
S3 | ||||
|
S4 | ||||
|
S5 | ||||
|
S6 | ||||
|
S7 | ||||
|
S8 | ||||
|
S9 | ||||
|
S10 |
Tabelul cu codificarea starilor.
Daca s-ar utiliza metoda matriceala de sinteza, etapa aceasta ar consta in intocmirea matricelor de transfer pentru functiile de excitatie Y1, Y2, Y3, Y4. Aceste matrice de tranzitie sunt diagrame Karnaugh de 13 variabile (y1, y2, y3, y4, x1, x2, x3, x4, x5, x6, CLI, CLD, PPSUP) deci cu 8192 locatii. Lucrul cu astfel de diagrame este foarte dificil.
O metoda care duce la utilizarea unor diagrame de dimensiuni mai mici consta in includerea variabilelor de intrare in interiorul tabelelor (diagramelor). Diagramele astfel obtinute se numesc diagrame VID (variabile incluse in diagrame). Pentru o diagrama Karnaugh nu n variabile, numarul locatiilor este de 2n ; prin includerea in diagrame a k variabile de intrare dimensiunea diagramei se reduce; numarul de locatii devenind 2n-k . In acest fel se obtine o simplificare considerabila a tehnicii de calcul in diferitele etape ale sintezei.
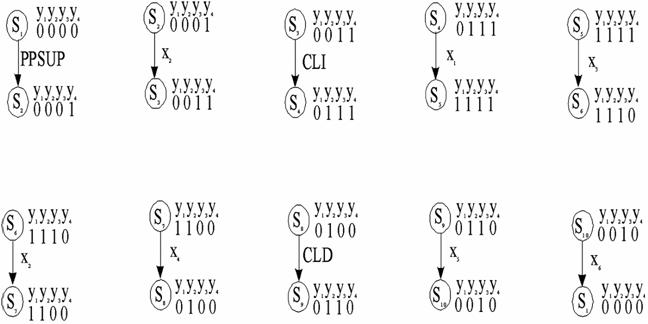
Pentru proiectul considerat; variabilele de intrare (x1, x2, x3, x4, x5, x6, CLI, CLD, PPSUP) se includ in diagrame, rezultand diagrame VID de 4 variabile. Pentru intocmirea diagramei VID este bine a se utiliza matricea ( diagrama ) starilor prezentata in figura 2.
|
y1y2 y3y4 | ||||
|
S1 |
S8 |
S7 | ||
|
S2 | ||||
|
S3 |
S4 |
S5 | ||
|
S10 |
S9 |
S6 |
Locatiile care contin semnul "-" corespund unor stari neutilizate.
|
Y1 |
Y2 |
Y3 |
Y4 |
|
|
S1 |
PPSUP |
|||
|
S2 |
| |||
|
S3 |
CLI | |||
|
S4 |
| |||
|
S5 |
|
|||
|
S6 |
| |||
|
S7 |
|
| ||
|
S8 |
CLD | |||
|
S9 |
| |||
|
S10 |
|
Tabelul starilor la momentul "t+1"
Tehnica determinarii functiilor de excitatie pentru diagrame VID, cuprinde urmatoarele etape:
I. - se considera toate variabilele inglobate = 0 si se formeaza subcuburi cu 1-urile din diagrama.
II. - se considera toate 1-urile combinatii indiferente ( ) si se formeaza subcuburi cu variabilele inglobate.
III. - se considera conjunctia variabilelor obtinute in etapa II.
IV. - se face disjunctia implicantilor primi obtinuti din etapele I si III.
V. - pentru mai mult decat o singura variabila inglobata pe diagrama, se traseaza pe rand conform algoritmului I - IV cate o singura variabila inglobata, celelalte fiind considerate 0, dupa care se face disjunctia tuturor termenilor obtinuti.
Y1 I II
|
y1y2 y3y4 |
y1y2 y3y4 |
y1y2 y3y4 | ||||||||||||||
|
|
| |||||||||||||||
|
|
| |||||||||||||||
|
10 |
y1y2y3 y1; y2y4
III.
![]() ;
; ![]()
IV.
![]()
Y2 I II
|
y1y2 y3y4 |
y1y2 y3y4 |
y1y2 y3y4 | ||||||||||||||
|
CLI |
CLI | |||||||||||||||
|
10 |
|
|
y1; y2y4; ![]() y2 ; y3y4
y2 ; y3y4
III. ;
IV.
![]()
Y3 I II
|
y1y2 y3y4 |
|
y1y2 y3y4 |
y1y2 y3y4 | |||||||||||||
|
CLD |
CLD | |||||||||||||||
|
|
| |||||||||||||||
|
10 |
|
|
|
|
y3y4;
![]() y4; y2y3;
y4; y2y3;
![]() ;
; ![]()
III.
![]() ;
; ![]() ;
; ![]() ;
; ![]()
IV.
![]()
Y4 I II
|
y1y2 y3y4 |
y1y2 y3y4 |
y1y2 y3y4 | ||||||||||||||
|
PPSUP |
PPSUP | |||||||||||||||
|
|
| |||||||||||||||
|
10 |
![]() y4;
y4;
![]()
III.
![]() ;
; ![]()
IV.
![]()
Variabilele de iesire (AB, ICL, RB, RSB, COBB, DCL, RIDB, RDB) depind doar de starea circuitului secvential. Matricele iesirilor sunt deci diagrame Karnaugh care admit ca variabile de control doar variabilele de stare. Au aceeasi dimensiune ca si matricea starilor si se obtin din acestea inlocuind fiecare stare cu iesirea corespunzatoare.
|
y1y2 y3y4 |
y1y2 y3y4 |
y1y2 y3y4 | ||||||||||||||
|
|
||||||||||||||||
|
10 |
![]()
![]()
![]()
|
y1y2 y3y4 |
y1y2 y3y4 |
y1y2 y3y4 | ||||||||||||||
|
10 |
![]()
![]()
![]()
|
y1y2 y3y4 |
y1y2 y3y4 | |||||||||
|
10 |
![]()
![]()
E. Implementarea schemei cu relee si contacte electrice
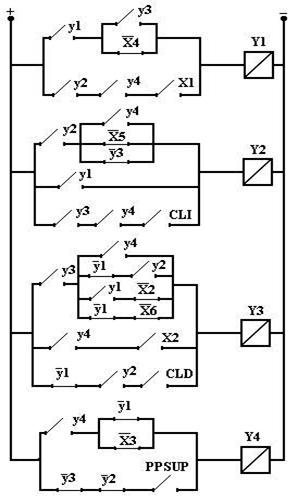
Implementarea functiei de excitatie si functia de iesire, utilizand relee
si contacte este prezentata in figurile 3 respectiv 4.
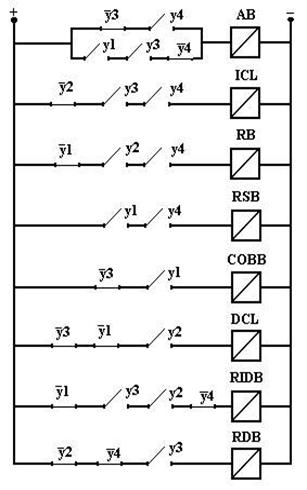
Figura 3. Schema de comanda a intrarii Figura 4. Schema de comanda a iesirii
Prin implementarea unei functii logice sau a unui sistem de functii logice se intelege realizarea efectiva a circuitului care realizeaza aceasta functie cu circuite integrate sau, altfel spus, inseamna proiectarea si desenarea schemei logice cu simboluri logice asociate circuitelor integrate si, de asemenea, calculul numarului de circuite integrate.
Unul dintre scopurile importante ale acestei operatii este acela de obtinere a unor scheme cu numar minim de circuite integrate si la un pret de cost cat mai scazut.
Implementarea cu porti logice porneste de la una din formele minime ale functiei respective.
Abordandu-se din acest punct de vedere problema implementarii se impune cu necesitate parcurgerea urmatoarelor doua etape:
Cunoasterea tipului de circuite logice combinationale;
Stabilirea metodelor specifice de proiectare cu aceste circuite integrate si a criteriilor de alegere a acelora care conduc la o structura minima a circuitului.
Pentru implementarea automatului secvential cu circuite logice(Figura 5.) si simularea circuitului logic secvential(Figura 6.) obtinut am folosit programul Electronics Workbench. La implementare iesirile trebuiesc sa fie sincrone .Acest lucru sunt realizate cu bistabile de tip D .
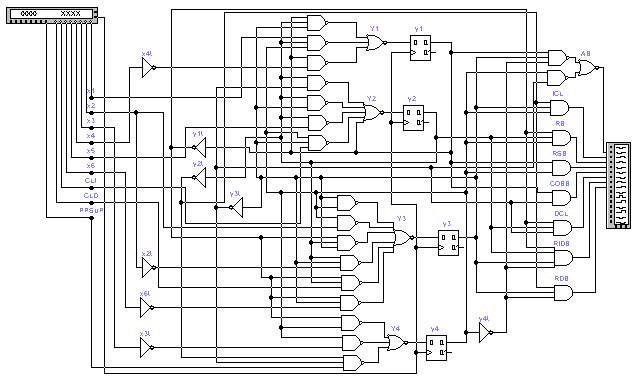
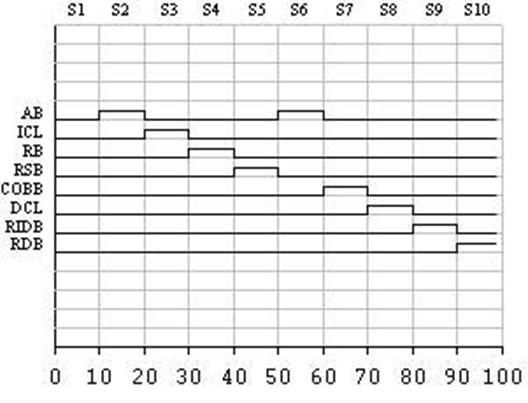
Figura 5. Implementarea automatului
Figura 6. Simularea circuitului
F. Concluzii
Circuitul de comanda proiectat este folosit pentru dirijarea unui utilaj industrial. Scopul acestui proiect este de a familiariza studentul cu metodele de proiectare ale automatelor secventiale in particular. Din faza de proiectare se observa ca aceasta nu este la fel de simpla ca in cazul circuitelor combinationale, unde proiectarea cu porti logice elementare este mult mai simpla. Aici se ivesc cu totul alte probleme si sunt cu mult mai multe conditii de luat in seama.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1585
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved