| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
MODELAREA STRUCTURILOR MECANICE ALE ROBOTILOR INDUSTRIALI
Notiuni generale:
Sistemul mecanic al robotului este alcatuit dintr-o multitudine de corpuri rigide legate intre ele prin articulatii de rotatie, translatie sau sferice.
Performantele miscarii se datoresc in primul rand proprietatilor dinamice ale structurii mecanice a robotuluisi a calitatilor sistemului de comanda a miscarii.Astfel rezulta in mod evident necesitatea etapei de modelare atat in proiectarea robotului cat si in comanda structurii mecanice a acestuia.
In general fiecare element al structurii mecanice contine un singur grad de libertate in raport cu elementul precedent astfel incat relatiile de transformare intre elemente contin un singur parametru nevariabil. Legarea in cascada a tuturor transformarilor associate fiecarui element permite determinarea parametrilor miscarii intregii configuratii mecanice si desigur a mecanismului de prindere a robotului.
In comanda miscarii robotilor, modelele pozitionale (geometrice), cinematice si dinamice servesc la transformarea coordonatelor obiectelor manipulate de robot in coordonate ale robotului (unghiuri de rotatie a motoarelor rotative, deplasari ale motoarelor liniare) si la proiectare unor reactii de compensare a greutatii proprii, a fortelor de cuplaj inertiale, Coriolis, centrifugale etc.
In faza de proiectare a legilor de comanda a miscarii, modelele geometrice, cinematice si dinamice se utilizeaza in regim de simulare, pentru verificarea corectitudinii algoritmilor, evaluarea performantelor, etc.
In cazul sistemelor evoluate de comanda si programare ale robotilor, modelele matematice ale structurilor de manipulare se folosesc si la programarea asistata de calculator, la planificarea actiunilor robotilor, etc.
Prin definitie, manipularea implica miscarea prin spatii intr-un anumit fel a elementelor robotului si a obiectelor apucate de acesta, ceea ce implica reprezentarea pozitiei si a orientarii diferitelor elemente componente ele robotului. Pentru aceasta este necesara definirea unor sisteme de coordonate si introducerea unor conventii de reprezentare spatiala.
Avand definit
un sistem de coordonate oxyz, orice punct P poate fi pozitionat printr-un
vector de pozitie ![]() care uneste
originea sistemului cu punctul respective si care se exprima vectorial in
functie de proiectiile sale pe cele 3 axe si versorii
care uneste
originea sistemului cu punctul respective si care se exprima vectorial in
functie de proiectiile sale pe cele 3 axe si versorii ![]() ,
, ![]() ,
,![]() ai sistemului
sub forma:
ai sistemului
sub forma:
![]() =
= ![]()
![]()
![]() +
+![]()
![]()
![]() +
+ ![]()
![]()
![]()
sau matricial printr-o matrice 3x1:
![]()
![]()
![]()
![]()
![]()
![]()
![]() (2)
(2)
in care indicele superior "o" exprima sistemul de coordonate oxyz.
Daca acum originea "o" a sistemului de
coordonate oxyz se exprima in raport cu sistemul OXYZ prin vectorul ![]() avand coordonatele X
avand coordonatele X![]() , Y
, Y![]() , Z
, Z![]()
![]()
![]() =
=![]()
![]() =
=![]()
![]()
![]()
cele doua sisteme de coordonate avand axele paralele, atunci expresia vectorului de pozitie al punctului P in raport cu sistemul OXYZ este:
![]()
![]() =
=![]()
![]() +
+ ![]()
![]()
sau matricial
![]()
![]() =
= ![]()
![]() +
+![]()
![]()
![]()
![]() =
=![]()
![]() +
+![]()
![]()
![]() =
=
Relatia ( ) reprezinta transformarea intre doua sisteme de coordonate cu axele paralele, aceasta putand fi interpretata ca un operator ce translateaza un vector.
![]() =
=
![]()
![]() =
=
sau
![]() =
= *
*![]()
in care operatorul
TRANS(X![]() , Y
, Y![]() , Z
, Z![]() )=
)=
reprezinta functia de translatie pe cele 3 directii cu valorile Xo, Yo, Zo.
Daca acum cele doua sisteme de coordonate au axele OX si ox suparapuse celelalte doua axe fiind rotite cu unghiul q sunt valabile solutiile:
Xp= xp Yp= yp*cosq -zp*sinq Zp=yp*sinq + zp*cosq
sau matricial:
![]()
![]()
sau sub forma echivalenta:
![]()
![]()
in care operatorul
ROT(X,o)=
reprezinta functia de rotatie in jurul axei OX cu unghiul q de la sistemul o la sistemul O.
In mod similar se pot defini operatorii de rotatie corespunzatori unei rotatii cu unghiul q in jurul celorlalte axe de coordonate:
ROT(Y,o)=
ROT(Z,o)=
Considerand trei sisteme de
coordonate Ox![]() y
y![]() z
z![]() Ox
Ox![]() y
y![]() z
z![]() si Ox
si Ox![]() y
y![]() z
z![]() avand originea O
comuna, astfel incat matricea
avand originea O
comuna, astfel incat matricea ![]()
![]() reprezinta
transformarea de rotatie de la sistemul Ox
reprezinta
transformarea de rotatie de la sistemul Ox![]() y
y![]() z
z![]() la
sistemul Ox
la
sistemul Ox![]() y
y![]() z
z![]() iar
matricea
iar
matricea ![]()
![]() reprezinta
transformarea de rotatie de la sistemul Ox
reprezinta
transformarea de rotatie de la sistemul Ox![]() y
y![]() z
z![]() la sistemul Ox
la sistemul Ox![]() y
y![]() z
z![]() ,in baza celor
prezentate pozitia unui punct P se poate exprima in sistemul Ox
,in baza celor
prezentate pozitia unui punct P se poate exprima in sistemul Ox![]() y
y![]() z
z![]() prin:
prin:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
iar
![]()
![]()
![]()
![]()
![]()
![]()
Inlocuind relatia (2) in (1) rezulta
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
sau
![]()
![]()
![]()
![]()
![]()
![]()
Din compunerea celor doua relatii rezulta:
![]()
![]()
![]()
![]()
![]()
![]()
Relatie ce reprezinta legea de compunere a
rotatiilor celor trei sisteme de coordonate care initial coincid,iar in prima
faza se roteste sistemul Ox![]() y
y![]() z
z![]() fata de sistemul Ox
fata de sistemul Ox![]() y
y![]() z
z![]() in concordanta cu transformarea
in concordanta cu transformarea ![]() ROT. In faza a doua Ox
ROT. In faza a doua Ox![]() y
y![]() z
z![]() si Ox
si Ox![]() y
y![]() z
z![]() coincide, iar Ox
coincide, iar Ox![]() y
y![]() z
z![]() se roteste fata de Ox
se roteste fata de Ox![]() y
y![]() z
z![]() cu transformarea
cu transformarea ![]() ROT.
ROT.
Prin compunera mai multor rotatii in jurul axelor de coordinate se obtine un operator de rotatie avand forma generala:
ROT= 
Dintre cele 9 variabile care compun transformarea, doar 3 sunt independente deoarece sunt valabile relatiile:
in care primele trei relatii exprima faptul ca versorii sistemului de coordonate sunt unitare iar urmatoarele trei relatii faptul ca acestia sunt perpendiculari.
Deoarece operatorii de rotatie sunt matrici, iar inmultirea matricilor in general nu este comutativa, nici multiplicarea operatiilor de rotatie nu este comutativa.
![]()
![]()
Cand se lucreaza cu corpuri in spatiu pentru a se cunoaste pozitia acestora este necesar sa se cunoasca pozitia unui punct ce le apartine si orientarea lor. Din acest motiv este de preferat sa se utilizeze o transformare globala care sa comaseze atat efectul de translatie cat si cel de rotatie.
Aceasta transformare poate fi definite ca rezultatul concatenarii celor doua matrici translatie si de rotatie, purtand denumirea de transformare omogena si a carei forma generala este:
T = TRANS (X,Y,Z)
+ ROT = 
Matrice 4x3 matrice coloana 4x1
care descrie orientarea care descrie pozitia unui punct
obiectului al obiectului
Aplicare succesiva a acestor operatori permite calculul coordonatelor pentru orice modificare a sistemului de coordonate.
De exemplu un punct P de coordonate (7,3,2) in sistemul Ox![]() y
y![]() z
z![]() este supus succesiv urmatoarelor transformari:
este supus succesiv urmatoarelor transformari:
o rotatie in jurul axei O
z![]() cu 90
cu 90![]() astfel ca se obtine sistemul Ox
astfel ca se obtine sistemul Ox![]() y
y![]() z
z![]()
o rotatie in
jurul axei O y![]() cu 90
cu 90![]() rezultand sistemul Ox
rezultand sistemul Ox![]() y
y![]() z
z![]() ;
;
o translatie cu
vectorul (4,-3,7) rezultand sistemul Ox![]() y
y![]() z
z![]() in care componentele
punctului sunt:
in care componentele
punctului sunt:
![]()
![]() =
= ![]()
![]()
![]()
![]() *
* ![]()
![]()
![]()
![]() *
* ![]()
![]()
![]()
![]() *
* ![]() =
= ![]()
in care ![]() T reprezinta transformarea generala a sistemului de coordinate I in raport
cu sistemul j.
T reprezinta transformarea generala a sistemului de coordinate I in raport
cu sistemul j.
In acest context functia de pozitionare a bratului unui robot in raport cu mediul incojurator se poate obtine prin definirea corespunzatoare si multiplicarea operatiilor de transformare cu ajutorul carora in conditiile functionarii automate, se realizeaza corelarea miscarilor robotului in mediul inconjurator, de catre sistemul de comanda prin programele intocmite pe baza algoritmilor de calcul.
REPREZENTAREA ORIENTARII
A. Unghiurile de orientare Euler ( ![]() )
)
ON
- intersectia dintre planul fix Ox![]() y
y![]() si planul mobil Oxy se numeste linia nodurilor
si planul mobil Oxy se numeste linia nodurilor
unghi de precesie - unghiul dintre axa fixa Ox![]() si linia nodurilor ON
si linia nodurilor ON
unghi de rotatie proprie unghiul dintre linia nodurilor ON si axa mobile Ox
unghi de nutatie unghiul dintre axa fixa O![]() z
z![]() si axa mobile Oz.
si axa mobile Oz.
O rotatie a corpului in jurul axei O![]() z
z![]() lasa unghiurile si nemodificate si schimba numai unghiul
lasa unghiurile si nemodificate si schimba numai unghiul
O rotatie a corpului in jurul axei mobile Oz lasa unghiurile si nemodificate si schimba numai unghiul
O rotatie a corpului in jurul axei nodurilor ON lasa unghiurile si nemodificate si schimba numai unghiul
Notiunea de rotatie R care
opereaza asupra unui vector v![]() exprimat in reperul Oxyz pentru determinarea proiectiilor vectorului v
exprimat in reperul Oxyz pentru determinarea proiectiilor vectorului v![]() in sistemul fix de coordinate Ox
in sistemul fix de coordinate Ox![]() y
y![]() z
z![]()
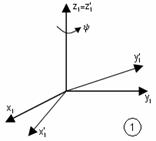


B. Unghiurile roll, pitch, yaw
Sunt o alta posibilitate de descriere a orientarii la care fiecare din cele 3 rotatii au loc in jurul axelor sistemului fix ca in figura de mai jos:
Se efectueaza o rotatie in jurul axei x![]() cu unghiul ψ, apoi se efectueaza o rotatie in jurul
axei y
cu unghiul ψ, apoi se efectueaza o rotatie in jurul
axei y![]() cu unghiul θ iar in final se roteste in jurul axei z
cu unghiul θ iar in final se roteste in jurul axei z![]() cu unghiul φ.
cu unghiul φ.
Transformarea de rotatie va avea expresia:
Obtinerea de rotatie intre cele 2 sisteme de coordonate se exprima in functie de unghiurile lui Euler ca produs al matricelor elementare de rotatie
![]()
Cele 3 rotatii elementare au expresiile:
 ;
;  ;
;
 ;
;
![]()
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1234
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved