| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Sistemul mecanic al robotilor industriali de tip manipulator realizeaza functia de miscare a acestora, de structura acestora depinzand posibilitatile de miscarea ale lor, deci deplasarea in spatiu a obiectului manipulat. Functia de miscarea a unui manipulator se poate descompune in trei componente:
deplasarea obiectului manipulat in spatiu (modificarea coordonatelor in spatiu ale punctului caracteristic);
modificarea orientarii obiectului manipulat (modificarea pozitiei in spatiu a dreptei caracteristice si a celei auxiliare - variatie cosinusurilor directori);
apucarea, pastrarea si eliberarea obiectului manipulat.
Deplasarea obiectului manipulat in spatiu se realizeaza cu subansamblul cinematic principal ala manipulatorului, care poarta denumirea de mecanism de ghidare sau mecanism generator de traiectorie (traiectoria punctului caracteristic). Aceasta traiectorie in spatiu a punctului caracteristic (obisnuit centrul de greutate al obiectului manipulat - cand acesta are forma regulata) se realizeaza in cele mai diferite forme prin combinarea miscarilor de translatie, prin combinarea miscarilor de rotatie sau prin miscari de translatie si rotatie (in functie de forma spatiului de lucru care trebuie obtinut).
In mod normal, pozitia in spatiu a unui punct este determinata de cele trei coordonate, deci pentru generarea traiectoriei punctului caracteristic ar fi necesare trei grade de miscare (translatii sau rotatii). La unele tipuri de roboti, numarul gradelor de miscare (de libertate) ale mecanismului de ghidare este mai mare ca trei, ceea ce conduce la cresterea flexibilitatii sistemului (manevrabilitatea): gradele de libertate suplimentare sunt necesare atunci cand robotului trebuie sa ocoleasca obstacole, sa manipuleze in locuri greu accesibile (in recipiente sau in interiorul unor caroserii de autovehicule), etc., in general sa execute operatii dintre cele mai complexe.
Mecanismul de orientare a pozitiei obiectului manipulat se ataseaza la ultimul element al mecanismului de ghidare, el realizand orientarea obiectului manipulat in raport cu un sistem de axe de referinta solidar cu elementul de legatura. Orientarea totala se realizeaza cu un numar de 3 rotatii (3 grade de miscare ale acestui mecanism) ale mainii robotului.
Pentru fiecare grad de miscare al manipulatorului este necesara o cupla cinematica de translatie sau rotatie (cupla cinematica de clasa a V-a). Deplasarea partii mobile in raport cu partea fixa necesita un element de actionare care poate fi integrat in constructia cuplei respective sau se afla pe batiul robotului, necesitand elemente intermediare de transmitere a miscarii. In ultimii ani se manifesta tot mai puternic tendinta constructorilor de roboti industriali de a realiza gradele de miscare ale robotului sub forma unor module tipizate, ceea e permite ca, in functie de aplicatia in care dorim sa instalam un robot, sa obtinem usor manipulatorul cu structura necesara.
Compunerea modulelor constructive pentru realizarea structurii mecanice a unui robot industrial depinde de forma si volumul spatiului de lucru in care trebuie sa evolueze robotul. Aceste module "se cladesc" pe o parte fixa, denumita soclu sau batiu, determinand diferite arhitecturi de roboti industriali.
Solutiile tipice de cuple cinematice de translatie, de rotatie si de actionare a modulelor din structura mecanica a robotilor pot fi:
Electromecanica, cu motoare electrice de diverse tipuri si transmisii mecanice; actionarea poate fi comuna, pentru mai multe module si individuala, pentru fiecare modul in parte, sau chiar pentru fiecare cupla cinematica in parte; ultima solutie este evident mai redundanta din punctul de vedere al comenzii, oferind o multitudine de posibilitati de generare a traiectoriei; motoarele pot fi cu actionarea continua sau de tip pas cu pas, ultimele simplificand comanda numerica a robotilor.
Pneumatica sau hidraulica, cu motoare hidraulice sau pneumatice liniare, rotative sau oscilante (cu palete). Solutiile tipice ale cuplelor mecanice de translatie si rotatie precum si ale actionarilor lor, utilizate in structurile mecanice ale robotilor prezentate in figura 1. Cuplele mecanice materializeaza cuplele cinematice de translatie si rotatie necesare generarii traiectoriilor si orientarii obiectului de manipulat.
Translatia T (fig. 1, a-m) poate fi realizata astfel:
a) direct de catre tijele motoarelor hidraulice (MH) sau pneumatica (MP) care pot fi cu dublu efect (fig. 1, b);
b) prin ghidaje auxiliare care preiau solicitari de incovoiere si impiedica rotirea tijelor motoarelor cinematice MP (de tip cilindru sau camera cu membrana) sau hidraulice MH (fig.1, c, d, e);
c) prin intermediul cuplelor surub-piulita (fig. 1, t, m) care transforma miscarea de rotatie R furnizata de un bloc de actionare BA intr-o miscarea de translatie T;
d) folosind combinatii de motoare hidraulice sau pneumatice si laturi cu role sau cabluri precum si roti de abatere (fig. 1, g), care transforma rotatiile R in translatii T; aceasta solutie poate fi folosita si in transformarea translatiilor T in rotatii R, evident, prin inversarea elementelor conducatoare ale cuplelor cinematice;
e) cu ajutorul cuplelor roata dintata-cremaliera (fig. 1, h, r) care transforma miscarile R in T; cupla din figura 1, r, este de tip reversibil, deci poate transforma si T in R, daca cremaliera este element conducator;
f) cu motoare electromagnetice liniare (fig. 1, i, j).
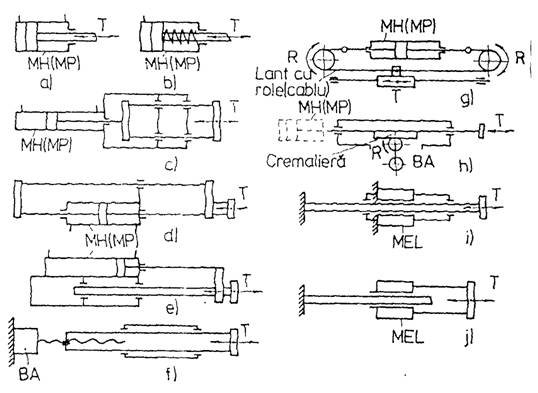
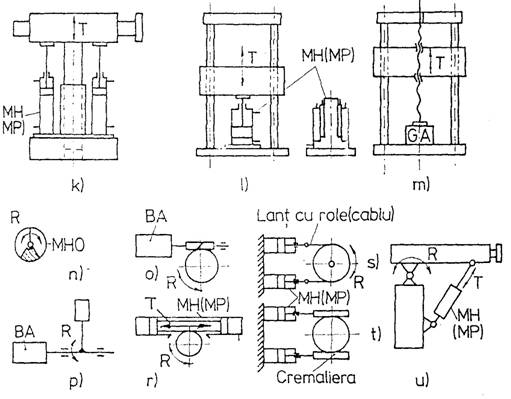
Fig.1. Solutii tipice de cuple mecanice si de actionare ale modulelor robotilor industriali: T, R - translatie, rotatii, MP - motor pneumatic, MH - motor hidraulic, MHO - motor hidraulic oscilant, BA - bloc de actionare = motor - reductor, MEL - motoare electromagnetice liniare.
Rotatiile T pot fi realizate cu:
a) motoare hidraulice oscilante MHO, cu paleta, fig. 1, n;
b) cu cuple mecanice de tip melc-roata melcata, ultima fiind antrenata de un bloc de actionare BA electromecanic sau hidraulic (fig.1, o) sau direct de la blocul de actionare BA (fig.1, p);
c) direct de la blocul de actionare BA, care, prin diverse tipuri de reductoare (clasice, planetare, armonice, etc) furnizeaza miscarea de rotatie R(fig. 1, p);
d) cu motoare hidraulice MH sau pneumatice MP cu doua pistoane, cu tija cu cremaliera si roata dintata (fig. 1, t), care lucreaza in contratimp;
cu poligoane articulate cu o latura (fig. 1, u).
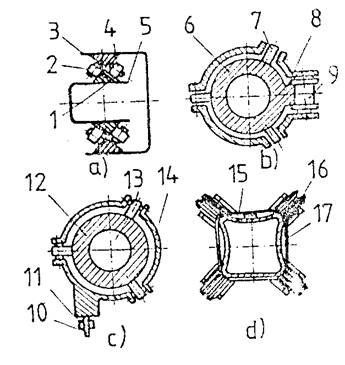
Fig. Ghidaje speciale de translatie folosite in constructia robotilor: 1- ghidaje triunghiulare; 2, 4, 7, 9, 11,13, 16 - role; 3, 4, 17 - port-ghidaje; 5, 12- coloane pentru translatii pe verticala; 6, 16 - brate pentru translatii pe orizontala; 8, 10 - pene pentru preluarea rotatiilor;
Solutiile de mai sus pot fi regasite, in diverse variante constructive, in structura mecanica a robotilor industriali actuali.
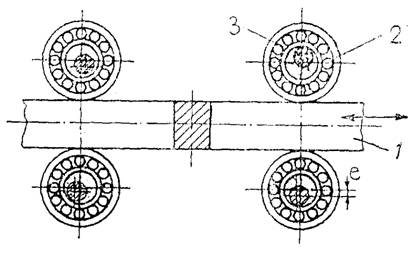
Fig. 3. Solutii de reglare a jocurilor in ghidaje prismatice: 1- ghidaj; 2- role - de ghidare cu rulmenti; 3 - arbore excentric; e- excentricitate.
Precizia de pozitionare a obiectului manipulat depinde in mare masura de precizia cu care sunt realizate imbinarile dintre elementele cuplelor de translatie si rotatie, respectiv de jocul dintre aceste cuple.
Pentru cuplele de rotatie (articulatii) - care, de fapt, sunt niste imbinari fus-lagar, lucrand prin alunecare sau rostogolire - realizarea unor jocuri minime nu prezinta dificultati tehnice, solutiile constructive si de executie fiind cele clasice utilizate in constructia de masini.
Pentru cuplele de translatie, ghidarea precisa - mai ales in cazul unor curse mari - este dificila si impune, pe langa solutiile de ghidare cunoscute, cu alunecare sau rostogolire si unele solutii tipice robotilor dintre care cateva sunt reprezentate in figura 2 si figura 3.
In cazul robotilor de manipulare, procesul condus cu care se actioneaza asupra mediului exterior, in sensul modificarii lui, este structura mecanica de manipulare. Indiferent de complexitatea sistemului de programare si comanda, problema unei comenzi performante (acceleratii mari, precizii ridicate de pozitionare, lipsa vibratiilor, raport optim putere instalata pentru o sarcina manipulata, etc.) a structurii mecanice de manipulare trebuie rezolvata.
Performantele miscarii se datoreaza in primul rand proprietatilor dinamice ale structurii mecanice de manipulare si a calitatilor sistemului de comanda a miscarii. Rezulta in mod evident necesitatea conceptului mecatronic in etapa de modelare cat si in proiectarea (sau proiectarea asistata de calculator) manipulatorului, cat si in comanda miscarii structurilor mecanice de manipulare.
In proiectarea asistata de calculator, modelele geometrice, cinematice si dinamice ale structurii mecanice se folosesc pentru analiza caracteristicilor structurale, a dimensiunilor geometrice, a distributiei de mase, a alegerii puterii sistemelor de actionare, a simularii comportarii dinamice, etc.
In comanda miscarii robotilor, modelele geometrice si cinematice se folosesc la transformarea traiectoriilor din coordonate operationale (coordonate in care se descrie sarcina robotului - in general carteziene) in coordonate robot (cilindrice, sferice, etc. care depind de structura mecanica particulara) si la proiectare unor reactii de compensare a greutatii proprii, a fortelor de cuplaj inertiale, Coriolis, centrifugale, etc.
In faza de proiectare a legilor de comanda a miscarii, modelele geometrice, cinematice si dinamice se utilizeaza in regim de simulare, pentru verificarea corectitudinii algoritmilor, evaluare performantelor, etc.
In cazul sistemelor evoluate de comanda si programare a robotilor, modelele matematice ale structurii de manipulare se folosesc si la programarea asistata de calculator, la planificarea actiunilor robotilor, etc.
Prin spatiul de lucru al unei structuri mecanice de manipulare, se intelege volumul care cuprinde totalitatea pozitiilor pe care le poate ocupa punctul caracteristic sau, astfel spus, este volumul cuprins intre suprafetele care inconjoara toate pozitiile posibile ale dispozitivului efector. In cadrul acestui spatiu sunt realizate traiectoriile si pozitiile obiectului manipulat de robot si deci, forma spatiului de lucru este determinata de cele trei grade de miscare de baza ale mecanismului generator de traiectorie, care pot fi translatii sau rotatii dupa cele trei axe de coordonate. In functie de modul cum sunt combinate aceste grade de miscare in cadrul schemei cinematice de baza a robotului, obtinem:
spatiul de lucru in coordonate carteziene;
spatiul de lucru in coordonate cilindrice;
spatiul de lucru in coordonate sferice.
Coordonatele care determina pozitia punctului caracteristic in spatiile de lucru si sferic rezulta din figura 4.
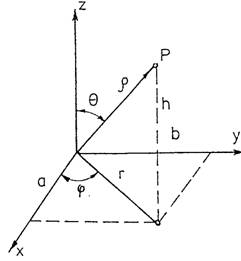
Fig 4 Pozitia punctului caracteristic in spatiul de lucru al robotului
Astfel, in spatiul de lucru cartezian (dreptunghic), coordonatele punctului caracteristic sunt x, y, z, in spatiul de lucru cilindric sunt r, , z, iar in spatiul de lucru sferic pozitia punctului este determinata de parametrii . Din acestea rezulta tipul miscarilor care trebuie realizate de mecanismul generator de traiectorie, pentru realizarea lor fiind necesare trei cuple cinematice interioare, de translatie T sau de rotatie R. Daca se admit reprezentarile conventionale din figura 5, pentru aceste cuple si miscarile lor se pot stabili schemele cinematice pentru spatiile de lucru prezentate.
Schema structurii mecanice care lucreaza in coordonate carteziene si spatiul de lucru sunt prezentate in figura 6. Spatiul de lucru, in acest caz, este un paralelipiped dreptunghic avand dimensiunile a, b, h, acestea constituind marimea curselor miscarilor de translatie dupa cele trei axe, Tx, Ty, Tz. Ca urmare, mecanismul generator de traiectorie pentru acest tip se realizeaza cu trei cuple de translatie.
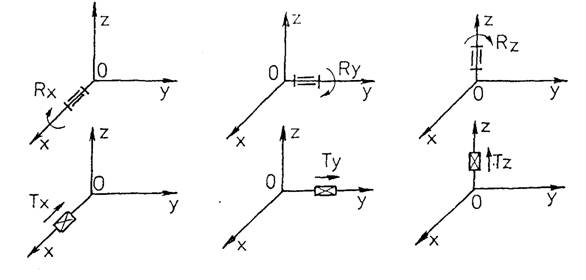
Fig.5. Reprezentari conventionale ale cuplelor cinematice
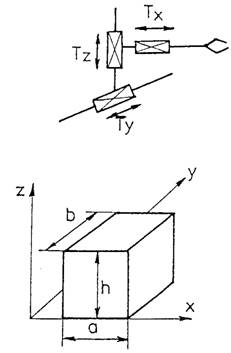
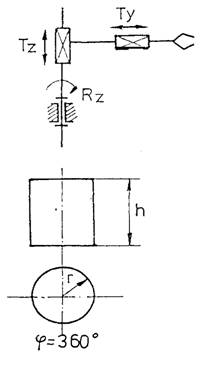
Fig 6. Fig. 7
Structurile mecanice articulate care lucreaza in coordonate cilindrice contin doua cuple cinematice de translatie, avand miscarile Tx, Tz si o cupla de rotatie avand miscarea Rz, cursele acestor miscari fiind b, h respectiv unghiul . (figura 7)
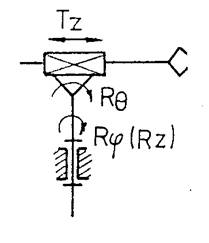
Fig. 8
Structurile articulate care lucreaza in coordonate sferice (figura 8) se realizeaza cu o cupla cinematica de translatie, pentru realizarea parametrului r si doua cuple cinematice de rotatie pentru realizarea parametrilor si (figura 4).
Spatiul de lucru de forma sferica se realizeaza si cu structuri la care toate cele trei grade de miscare sunt rotatii, dar in acest caz punctul caracteristic se poate deplasa numai pe suprafata sferei, ceea ce limiteaza utilizarea practica a acestei scheme.
Un spatiu de lucru tridimensional se poate obtine si cu mecanisme generatoare de traiectorie cu mai mult de trei grade de miscare, de exemplu doua translatii si trei miscari de rotatie, lucrand in sistem de coordonate combinat. In aceste cazuri, spatiul de lucru nu mai are forma regulata, obtinandu-se prin combinarea formelor regulate prezentate mai sus. De asemenea, trebuie subliniat si faptul ca mecanismele generatoare de traiectorie nu sunt deschise ca cele din figura 6 - 8. In special, in cazul robotilor care lucreaza in coordonate combinate, cu mai mult de trei grade de miscare, acestia au la baza constructiei lor un mecanism spatial deschis, dar care contine si unul sau mai multe contururi poligonale inchise.
Spatiile de lucru reale ale structurilor mecanice articulate constituie numai o parte din spatiul de lucru teoretic (paralelipiped, cilindru, sfera). Acest lucru se datoreaza dulapurilor de comanda sau panourilor hidraulice care se amplaseaza langa structura, sau faptului ca procesul tehnologic pentru care se proiecteaza structura respectiva nu reclama utilizarea intregului spatiu teoretic.
Sinteza structurilor de manipulare se efectueaza luand in considerare performantele sistemului hibrid mecano-electric, cum ar fi spatiul de lucru, repetabilitatea, capacitatea de incarcare, posibilitatile de miscare ale mainii, viteza maxima.
Astfel, criteriile clasice de sinteza folosite in teoria mecanismelor, cum ar fi realizarea unui numar finit de pozitii elementului conducator, sunt schimbate cu alte criterii cinematice si dinamice.
Miscarea structurilor de manipulare este descrisa, in general, de sisteme neliniare, regimurile de functionare fiind regimuri nepermanente, astfel incat, in cazul conducerii cu calculator, apar restrictii de proiectare a structurii mecanice legate de implementarea comenzii miscarii. In aceste conditii, analiza pozitionala si procedurile de modelare dinamica tin seama de structurile mecanice tip, specifice robotilor industriali.
In prima etapa, structura de manipulare poate fi privita ca un sistem mecanic format de corpuri legate. Restrictiile de tip egalitate introduse de legaturi,
![]() (1)
(1)
unde ![]() este vectorul
parametrilor de pozitionare a celor n
corpuri, formeaza un sistem de ecuatii algebrice, in general
neliniare.
este vectorul
parametrilor de pozitionare a celor n
corpuri, formeaza un sistem de ecuatii algebrice, in general
neliniare.
Din cele j ecuatii ale sistemului (1) se pot determina prin explicitare, sau in baza teoremei de existenta a solutiei unui sistem de ecuatii, m≤j parametri de pozitionare in functie de ceilalti 6n-m parametri. Cei 6n-m parametri care definesc complet pozitia sistemului, constituie gradele de libertate ale sistemului in deplasari finite si formeaza vectorul coordonatelor generalizate.
In raport cu mecanismele, structura de manipulare difera in mod esential, avand probleme specifice legate de realizarea continua a miscarii dorite pentru corpul condus. Ca urmare, atat metodele de analiza, cat si metodele de sinteza s-au dezvoltat in contextul realizarii acestui deziderat. In analiza si sinteza structurilor de manipulare apar insa si o serie de notiuni uzuale din teoria mecanismelor.
In raport cu realizarea teoretica a contactului intre elemente, cuplele cinematice sunt denumite inferioare in cazul in care contactul se realizeaza (teoretic) pe o suprafata data si superioare in cazul in care, teoretic, contactul dintre elemente se realizeaza pe o linie sau un punct. In figura 9 se prezinta cuplele inferioare de translatie (prismatica), rotatie si sferica, iar in figura 10 se prezinta cuple superioare de tip angrenaj si tachet-cama.
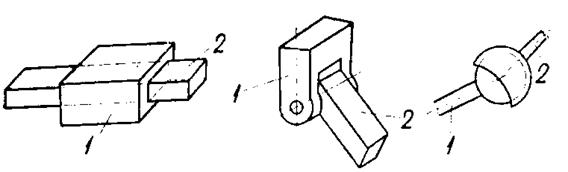
Fig. 9. Cuple inferioare de translatie, rotatie si sferice
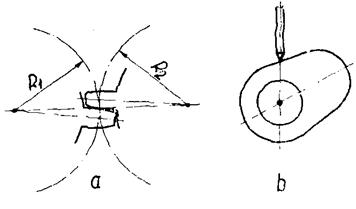
Fig. 10 Cupla superioara de tip angrenaj (a) si tachet-cama (b)
In raport cu numarul de grade de libertate eliminate in miscarea relativa, cupele cinematice se impart in cinci clase. Numarul conditiilor de legatura indica clasa cuplei. Astfel, cupla de translatie si cupla de rotatie sunt cuple de clasa a cincia, iar cupla sferica, cupla de clasa a treia.
Cuplele cu contact permanent, corespunzatoare legaturilor bilaterale, sunt denumite inchise. Cuplele corespunzatoare legaturilor unilaterale, in care miscarile relative sunt limitate numai intr-un anumit domeniu, sunt denumite deschise.
Legarea succesiva a elementelor prin intermediul cuplelor cinematice se numeste lant cinematic.
Rangul j al unui corp reprezinta numarul cuplelor cinematice de pe elementul respectiv. In cazul in care
se obtine un lant deschis simplu, cu n corpuri , cu structura de graf conex nearborescent (figura 11)
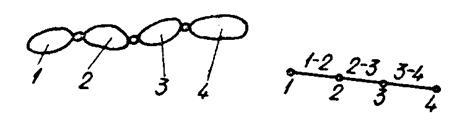
Fig. 11 Lant cinematic deschis simplu
Gradul de mobilitate este dat de numarul gradelor de libertate ale unui lant cinematic in raport cu un reper atasat unui element (corp) al lantului. In cazul mecanismelor, elementul in raport cu care se stabileste gradul de mobilitate este fix sau considerat fix. In analiza si sinteza structurilor de manipulare notiunea de grad de mobilitate se foloseste in studiul substructurilor modulare, fiind calculat, in raport de un element component al substructurii denumit baza. Miscarea este determinata in raport de un reper inertial, sau considerat inertial intr-un anumit domeniu, definit convenabil, in raport de aplicatia concreta.
Se aminteste ca reperul inertial este un reper in care ecuatia fundamentala de miscare a unui punct material isi pastreaza forma
![]() (2)
(2)
ar fiind acceleratia relativa in raport cu reperul inertial.
Formula structurala stabileste numarul de grade de libertate ale unei substructuri in raport de corpul de baza, luand in considerare cazurile uzuale de dependenta ale conditiilor de legatura.
Pentru un mecanism spatial, numarul gradelor de libertate in aport cu reperul inertial este dat de relatia
 (3)
(3)
in care e este numarul de elemente iar cm - numarul cuplelor cinematice care elimina m grade de libertate (de clasa m).
Gradul de mobilitate al unui mecanism spatial este dat de relatia
 (4)
(4)
In care n este numarul de elemente mobile in raport cu elementul considerat fix.
Relatiile (3), (4) presupun toate conditiile de legatura independente.
Notiunea de familie este legata de un caz uzual de dependenta, in care, pentru toate corpurile se realizeaza acelasi numar k de parametri de pozitionare constanti in raport cu reperul de baza. O substructura de acest tip este denumita substructura de familia k. Gradul de mobilitate se calculeaza in acest caz cu relatia
 (5)
(5)
in care n este numarul de elemente mobile in raport de baza, mi - numarul de conditii de legatura ale legaturii i iar NL - numarul de legaturi, dintre care se obtine
 (6)
(6)
Relatia (4) corespunde la
 (7)
(7)
forma particulara a relatiei (6).
Se observa ca:
pentru un lant deschis simplu numarul de legaturi este egal cu numarul de corpuri mobile relativ la baza
NL= n
aceeasi conditie o pot indeplini si lanturile deschise compuse, cu structura de graf arborescent;
pentru un lant simplu
NL= n +1
pentru celelalte tipuri de lanturi, in general, exista relatia
NL ≥ n
Pentru mecanisme, gradul de mobilitate al mecanismului de familie k se determina cu relatia
 (8)
(8)
In figura 12 se prezinta o structura de tip lant deschis simplu si o structura de tip lant inchis simplu. In raport de reperul 1, corpurile 2, 3, 4 au trei parametri de pozitionare nuli:
z0i = 0; i = 0 i = 0; i = 2, 3, 4
In cazul lantului deschis simplu (M = M* = 3), nu exista dependenta intre conditiile de legatura. In cazul lantului inchis simplu exista relatiile
![]()
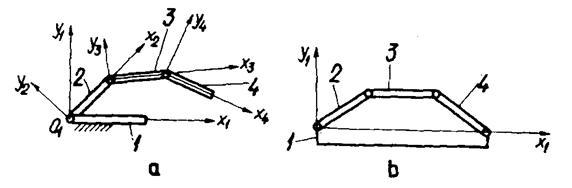
Fig. 12 Structura de manipulare de tip lant deschis (a) si de tip lant inchis (b)
Se observa ca dependenta conditiilor de legatura, respectiv gradul de mobilitate (M = 1) corespunde paralelismului axelor cuplelor de rotatie. In cazul in care paralelismul axelor cuplelor de rotatie nu este realizat, substructura are gradul de mobilitate M = -
O prima problema in sinteza unei structuri de manipulare este determinarea structurii cu numar minim de corpuri cu care pot realiza gradele de libertate ale corpului condus, in conditiile folosirii unor motoare rotative sau liniare.
Intrucat motoarele rotative si liniare pot fi asimilate unor cuple de rotatie, respectiv translatie, numarul gradelor de libertate in ipoteza in care conditiile de legatura sunt independente se calculeaza cu relatia
 (9)
(9)
in care n este numarul elementelor mobile in raport cu reperul inertial, NM - numarul cupelor motoare, NL+NM este numarul de conditii de legatura impuse de legatura i, de unde rezulta
 (10)
(10)
Valoarea minima a numarului de elemente mobile n se obtine pentru NL = 0.
In plus, deoarece coordonatele generalizate iau valori controlate, se impune o structura conexa de lant, cu NM ≥ L. Introducand valoarea minima NM = L se obtine :
n = L = NM (11)
Conditia (11) este indeplinita de lantul deschis simplu si poate fi indeplinita de lantul deschis cu structura arborescenta.
Conditia de inversabilitate a modelului geometric impune ca pozitia si orientarea corpului condus sa depinda de toate cele L coordonate generalizate.
Minimizarea numarului de corpuri este un criteriu de sinteza cinematica, legat de realizarea unor solutii constructive simple. In mod curent se folosesc structuri de manipulare cu unul sau doua corpuri conduse (maini), cu structuri de lant cinematic arborescent.
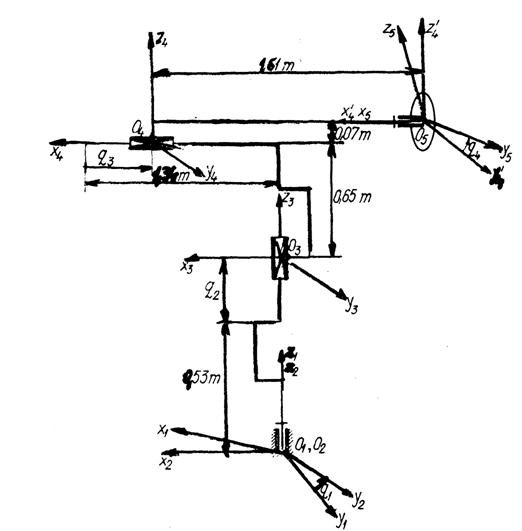
Fig. 13 Structura de manipulare (lant deschis) cu patru grade de libertate si un organ de executie (corpul 5)
In figura 13 si se prezinta o structura cu patru grade de libertate de tip lant deschis simplu cu o singura mana si cu doua maini. In aceste reprezentari s-au introdus conditiile globale de legatura, eliminand legaturile pasive necesare obtinerii unei rigiditati acceptabile.
Solutia de lant deschis simplu, in care apar numai cuple motoare este denumita structura cu actionare directa. Actionarea directa corespunde criteriului cinematic de optim discutat, dar nu corespunde criteriilor dinamice de optim. Limitarea deformatiilor de regim static si dinamic conduce, in cazul actionarii directe, la o structura de masa mare, in care puterea este consumata in cea mai mare parte pentru realizarea miscarilor relative ale elementelor robotului si nu pentru realizarea miscarii dorite pentru elementul condus. Au aparut in acest fel structuri de manipulare cu lanturi inchise, in care cuplele motoare sunt inchise in structuri modulare.
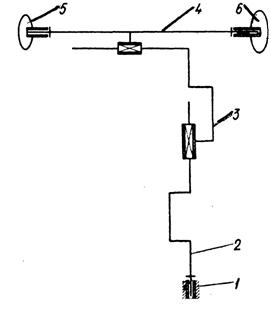
Fig. 14 Structura de manipulare (lant deschis) cu patru grade de libertate si doua organe efectoare (corpurile 5 si 6)
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3827
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved