| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
DOCUMENTE SIMILARE |
|

VILNIAUS GEDIMINO TECHNIKOS UNIVERSITETAS
ANTANO GUSTAIČIO AVIACIJOS INSTITUTAS
AVIACIJOS PRIETAISŘ KATEDRA
ORO UOSTŘ ŠVIESŘ SIGNALINËS SISTEMOS IR JŘ AUTOMATINËS KONTROLËS ANALIZË
TURINYS
ÁVADAS.11
Tűptinës vizualaus stebëjimo sistemř analizë13
Kilimo ir tűpimo tako signaliniř žiburiř áranga..13
1.1.2 Sklendimo tűptinës (glisados) vizualaus stebëjimo sistemos..18
1.2 Sistemos PAPI ir APAPI žiburiř reikšmë ir jř išdëstymo schema..26
1.2.1 PAPI ir APAPI sistemř analizë..26
1.2.2 PAPI sistemos áranga kilimo ir tűpimo take be ILS sistemos.30
1.2.3 PAPI sistemos derinimas su ILS sistema..33
1.3 Tűptinës sistemř šviesos šaltiniai ir jř maitinimo schemos.37
1.3.1 Tűptinës žiburiř árengimas ir maitinimo schemos37
1.3.2 PAPI sistemos šviesos šaltiniai ir jř charakteristikos.42
1.4 Žiburiř kontrolinës sistemos45
2.1 Principinës schemos projektavimas.46
2.1.1 Davikliai46
2.1.2 Universalus interfeisas..47
2.1.3 Kodř generatorius/dešifratorius48
2.1.4 Duomenř siuntimas jëgos grandinëmis55
2.2 Veikimo algoritmas.57
2.3 Programos tekstas.58
Išvados ir pasiűlymai..64
Literatűra..65
Priedai66
PAVEIKSLAI
1 pav. Aerodromo žiburiř išsidëstymo schema .17
2 pav. Tűptinës žiburiř išsidëstymo schema ..21
3 pav. T VASI sistemos pastatymo kampai .22
4 pav. VASI ir T VASI žiburiř vaizdas iš skirtingř kampř ..25
5 pav. VASI ir T VASI pastatymo kampai ..25
6 pav. PAPI žiburiř vaizdas iš skirtingř kampř 29
7 pav. PAPI sistemos pastatymo kampai ..29
8 pav. PAPI žiburiř išsidëstymo schema .30
9 pav. Atstumas nuo piloto akiř iki priekinio rato ir nuo priekinio rato iki KTT slenksčio 32
10 pav. Kliűties perskridimo paviršius .32
11 pav. Koreguotas PAPI sistemos žiburiř išdëstymas ávertinant kliűties aukštá virš OCS ..33
12 pav. Suderinimas tarp PAPI ir ILS, teorinis pavyzdys 35
13 pav. Suderinimas tarp PAPI ir ILS, praktinis pavyzdys .36
14 pav. Tűptinës žiburiř aukštis nuo žemës paviršiaus .37
15 pav. A PAPI sistemos maitinimo schema .38
16 pav. PAPI sistemos maitinimo schema 39
17 pav. PAPI žiburiř lempř maitinimas per izoliuojančius transformatorius 39
18 pav. 3BAR VASI sistemos žiburiř maitinimo schema ..40
19 pav. PAPI žiburio ir izoliuojančiř transformatoriř árengimas 40
20 pav. PAPI sistemos žiburio konstrukcija ..41
21 pav. VASI sistemos žiburio konstrukcija ir skleidžiami spinduliai .41
22 pav. Šviesos stiprumo sklaida horizontalioje ir vertikalioje plokštumose 43
23 pav. Mini PAPI sistemos žiburiř stiprumo sklaidos grafikas .43
24 pav. VASI sistemos AWF-320 tipo žiburiř šviesos stiprumo sklaidos grafikas44
25 pav. Mikroschemos MAX 232 bendras vaizdas ir struktűrinë schema47
26 pav. Principinë interfeiso schema nuosekliam portui ..47
27 pav. Mikroprocesoriaus AT 89C51 isvadř paskirtis 50
28 pav. Impulsř generatoriaus/dešifratoriaus principinë schema .53
29 pav. Impulsř generatoriaus/dešifratoriaus principinë schema kartu su fotodavikliu ..54
30 pav. Mikroprocesoriaus AT89C2051 programos algoritmas ..55
31 pav. Siřstuvo/imtuvo principinë schema56
32 pav. Cx; Rx signalas.57
LENTELËS
1 lentelë. KTT žiburiai ir spinduliuojamos spalvos .14
2 lentelë. Orlaiviř klasifikacija pagal atstumŕ nuo piloto akiř iki priekinio rato .30
3 lentelë. Orlaiviř klasifikavimas pagal atstumŕ tarp piloto akiř ir skrydžio aukščio ..34
4 lentelë. PAPI sistemos žiburiř šviesos stiprumo sklaida ..42
5 lentelë. Specialiřjř registrř funkcijř adresai51
SANTRUMPOS
AP – apsauginës priemonës
ASK – analoginis skaitmeninis keitiklis
DV – nuotolinis valdymas
EWH – eye to wheel height - (atsumas nuo piloto akiř iki rato)
KTT - kilimo ir tűpimo takas;
PAPI – Precision Approach Path Indicator - (tiksliojo tűpimo trajektorijos indikatorius);
PC – asmeninis kompiuteris
RT - riedëjimo takas
SŽÁ - signaliniai žiburiř árenginiai
3BAR VASI- VASI sistema su papildoma dviejř žiburiř sekcija
T VASI – VASI sistema, kurios žiburiai išdëstyti T formos pavidalu
WTH – wheel to threshold height - (atstumas nuo kilimo ir tűpimo tako slenksčio iki orlaivio rato).
Pastaba: prie santrumpř PAPI, VASI, 3BAR VASI ir T VASI žymëjimas A (pvz APAPI) reiškia, jog naudojama tik pusë sistemos.
ÁVADAS
Orlaivio artëjimas á tűpimo kursŕ, žemëjimas ir tűpimas yra gana sudëtinga procedűra, kurios saugumui užtikrinti viena iš sistemř yra oro uosto žiburiř sistemos. Orlaiviui tupiant, pilotas vadovaujasi radijo prietaisř parodymais, o po to pradeda vadovautis žiburiř teikiama informacija, kurios veikimas turi bűti patikimas.
Siekiant maksimaliai didinti oro uostř aptarnaujamř orlaiviř sakičiř, tuo pačiu metu išlaikant aukštŕ skrydžiř saugos lygá, laikui bëgant aerodromuose imtos diegti KTT signaliniř žiburiř automatinës kontrolinës sistemos, kurios kontroliuoja ne tik žiburius, bet ir jëgos linijas. Siekiant maksimaliai užtikrinti skrydžiř saugŕ didëjant oro transporto srautams, didëja reikalvimai anžeminiam aerodromř transportui. Leidimasis, tűpimas ir riedëjimas á sustojimo vietŕ vykdomas pagal kilimo ir tűpimo tako (KTT) žiburiř árangŕ. Orlaivio tűpimas vyksta gana greitai, todël žiburiř kiekis turi bűti optimalus, kad pilotas spëtř ásisavinti žiburiř teikiamŕ informacijŕ ir spëtř priimti sprendimus. Žiburiř kieká ir išdëstymo planŕ kiekvienam oro uosto tipui reglamentuoja ICAO standartai, kuriř turi bűti laikomasi. Automatinës signaliniř žiburiř kontrolës sistemos mažina jau esančios sistemos eksploatavimo išlaidas nemažinant skrydžiř saugos blogomis meteorologinëmis sŕlygomis (turint omenyje, kad visi žiburiai veikia nepriekaištingai), skrydžiř vadovo apkrovimŕ. Paprastai tokios sistemos derinamos jau su árengtomis signaliniř žiburiř sistemomis, todël tai mažina ekonomines išlaidas. Automatinës signaliniř žiburiř kontrolës sistemos gali tikrinti kiekvienŕ žiburá atskirai, arba tam tikras žiburiř grupes, - esant gedimui nurodant žiburiř grupć. Taigi sistemos privalumai yra tokie:
mažesnis darbuotojř apkrovimas ir didelë skrydžiř sauga;
mažesnës signaliniř žiburiř sistemos eksploatacinës išlaidos;
išvengiama žmogaus klaidos faktoriaus;
greitas ir efektyvus gedimř nustatymas.
Šiame darbe bus nagrinëjamos aerodromo žiburiř sistemos, jř paskirtis, efektyvumas taip pat žiburiř maitinimo bei ryškio reguliavimo sistemos, kurios daugeliui žiburiř sistemř yra panašios, o veikiantiems vienodu režimu, schemos yra ekvivalenčios. Bus pateikiamas tűptinës žiburiř ryškio reguliavimas, šviesos stiprumo priklausomybës nuo orlaivio artëjimo kampo horizontaliŕja kryptimi, žiburiř konstrukciniai elementai ir t.t. Visa tai analitinëje dalyje.
1. Analitinë dalis
1.1 Tűptinës vizualaus stebëjimo sistemř analizë
1.1.1 Kilimo ir tűpimo tako žiburiř áranga
Naktá ir dienŕ, kai blogas matomumas, lëktuvo tupdymŕ ir riedëjimŕ á sustojimo vietŕ užtikrina žiburiř sistema (1 pav.).
Pagal žiburiř ir elektrinës árangos technologinio projektavimo normas aerodromuose skiriamos penkios žiburiř sistemos:
Pirmoji – mažo intensyvumo vizualaus tűpimo žiburiř sistema.
Antroji – mažo intensyvumo instrumentinio tűpimo žiburiř sistema.
Trečioji – didelio intensyvumo pirmosios kategorijos lëktuvř instrumentinio tűpimo žiburiř sistema.
Ketvirtoji – didelio intensyvumo antrosios kategorijos lëktuvř instrumentinio tűpimo žiburiř sistema.
Penktoji – didelio intensyvumo trečiosios kategorijos lëktuvř instrumentinio tűpimo žiburiř sistema.
Žiburiř sudëtis ir spinduliuojamos spalvos pateiktos 1 lentelëje.
Žiburiř sistemos ir radiotechninës priemonës, tokios kaip PAPI ir ILS, sudaro tűpimo sistemos kompleksŕ.
Pagal aerodromř ir oro uostř klases naudojamos žiburiř sistemos pateiktos 1 lentelëje.
Artëjimo žiburiai su nuolatinio spinduliavimo šviesos šaltiniais ir su impulsiniais šviesos šaltiniais naudojami tam, kad pilotas galëtř tiksliai išvesti lëktuvŕ á tűpimo kursŕ, pereiti nuo vadovavimosi lëktuvo prietaisais prie vadovavimosi žiburiř sistemomis. Žiburiai su nuolatinio spinduliavimo šviesos šaltiniais dar naudojami ruožui žymëti tarp artimojo radijo švyturio ir kilimo bei tűpimo tako (toliau KTT) slenksčio.
Artëjimo žiburiai išdëstyti artëjimo juostos teritorijoje, kuri yra KTT ašies tćsinys.
Trečiosios sistemos artëjimo žiburiai išdëstyti 300m atstumu nuo KTT pradžios.
Artëjimo žiburiai su impulsiniais šviesos šaltiniais veikia bëgančiosios bangos režimu, t.y. vienas po kito užsidega žibintai á KTT pusć. Vieno žiburio blyksnio dažnis – 900-120 kartř per 1 minutć. Šie žiburiai išdëstyti 600m atkarpoje, atstumas iki KTT pradžios 300 – 900m. Pagal šoninio horizonto žiburius pilotas ištiesina tupdomŕ lëktuvŕ. Atsižvelgiant á žiburiř sistemŕ, šviesos horizontas turi 1, 2, 5 žiburiř eiles, išdëstytas KTT tćsinyje. Atstumas tarp eiliř 150m, tarp žiburiř eilëse 2,7 – 3,0m. Kraštinio horizonto žiburiai kartu su artëjimo žiburiais informuoja lakűnŕ apie lëktuvo padëtá KTT krašto atžvilgiu.
Ašiniai ir šoniniai KTT žiburiai nurodo KTT ašá tupdomam lëktuvui [2].
1 lentelë. KTT žiburiai ir spinduliuojamos spalvos
|
Žiburiř grupiř pavadinimas |
1 kategorija |
2 kategorija |
3 kategorija |
4 kategorija |
5 kategorija |
Spind. spalva |
|
Artëjimo žiburiai (su nuolatinio spinduliavimo šviesos šaltiniais) |
Balta |
|||||
|
Artëjimo žiburiai (su impulsiniais šviesos šaltiniais) |
N |
N |
R |
R |
R |
Balta |
|
Kraštiniř horizontř žiburiai |
Balta |
|||||
|
Ašiniai žiburiai (galinëje KTT saugos zonoje) (2) |
N |
N |
N |
Balta |
||
|
Centriniai žiburiai |
N |
N |
N |
Balta |
||
|
KTT šoniniai žiburiai |
N |
N |
N |
Balta |
||
|
KTT slenksčio žiburiai |
Žalia |
|||||
|
KTT galo žiburiai |
Raudona |
|||||
|
KTT tűpimo žiburiai |
Balta arba geltona(5) |
|||||
|
Ašiniai KTT žiburiai |
N |
N |
R(3) |
Balta, raudona(6) |
||
|
KTT tűpimo zonos žiburiai |
N |
N |
N |
Balta |
||
|
Tűptinës žiburiai (4) |
N |
N |
R |
R |
R |
Balta ir raudona |
|
Skubaus pasitraukimo iš KTT žiburiai |
N |
N |
R |
R |
Žalia |
|
|
Riedëjimo tako šoniniai žiburiai |
N |
R |
Mëlyna |
|||
|
Riedëjimo tako ašiniai žiburiai |
N |
N |
N |
R |
Žalia |
|
|
Aerodromo nurodomieji žiburiai |
N |
R |
Raudona, žalia, geltona |
|||
|
KTT apsaugos žiburiai |
Raudona |
Pastabos:
Lentelëje vartojami sutartiniai žymenys:
1 – ženklas ”+” reiškia, kad šiuo ženklu pažymëti žiburiai yra privalomi pasirinktŕjai sistemai, ”R” – rekomenduojami, N – nebűtini.
2 – 3-iojoje sistemoje naudojami vienetiniai artëjimo žiburiai su pastovaus spinduliavimo šaltiniais.
3 – rekomenduojami aerodromuose su KTT, kurio plotis didesnis nei 50m ir kai didelis lëktuvř tűpimo greitis.
4 – 1-ojoje sistemoje (nesant tűptinës žiburiř ir 2-ojoje sistemoje) naudojami tűpimo žiburiai.
5 – žibintai tolimojoje KTT dalyje spinduliuoja geltonos spalvos šviesŕ (šio ruožo ilgis 600m, bet ne ilgesnis už pusć tako).
6 – ašiniai KTT žiburiai spinduliuoja baltŕ šviesŕ iki KTT taško, 900m atstumu nutolusio nuo priešingo KTT galo; nuo 300 iki 900m atstumo atkarpoje ašiniai žiburiai spinduliuoja pakaitomis baltos ir raudonos spalvos šviesŕ; 300m atsumu nuo priešingo KTT galo ašiniai žiburiai spinduliuoja raudonos spalvos šviesŕ.
Ašiniai ir šoniniai KTT žiburiai nurodo KTT ašá tupdomam lëktuvui.
KTT žiburiř grupei priklauso žiburiai, išdëstyti kilimo ir tűpimo take ir jo ribose, naudojami tűpimo – kilimo operacijř saugumui. Šiai grupei priklauso slenksčio, ašiniai ir tűpimo zonos žiburiai. Slenksčio žiburiai rodo KTT pradžiŕ, jř švietimas reiškia leidimŕ tűpti. Šie žiburiai išdëstyti KTT galuose (nemažiau kaip po 3 žiburius).
Ážiebti KTT galo žiburiai reiškia leidimŕ tűpti (kai išjungti slenksčio žiburiai). Šiř žiburiř turi bűti ne mažiau nei po tris kiekviename KTT gale. Atstumas tarp žiburiř eilëse ne mažesnis nei 3m.
Tűpimo žiburiai naudojami KTT galinëms riboms žymëti. Šie žiburiai išdëstyti ne mažesniu nei 3m atstumu nuo KTT krašto.
Ašiniai KTT žiburiai rodo pilotui KTT ašá tupiant ir kylant lëktuvui. Šie žiburiai išdëstyti visoje KTT atkarpoje, tarpai tarp žiburiř 12,5m arba 15m.
KTT tűpimo zonos žiburiai žymi tűpimo zonos pradžiŕ ir jos šonines ribas, taip pat palengvina tűpimŕ, kai blogas matomumas. Šie žiburiai sumontuoti 900m atstumu nuo KTT dviem eilëm ir atstumas tarp žibintř eilëse 18m, atstumas tarp eiliř 25m arba 30m.
Tuptinës žiburiai veikia dienŕ ir naktá, jie skiri vizualiai parodyti tuptinć (jř paskirtis, sandara, veikimo principas bus nagrinëjamas kituose poskyriuose).
Riedëjimo tako (RT) ašiniai žiburiai užtikrina saugř lëktuvo pasitraukimŕ iš KTT, kai didelis lëktuvo riedëjimo greitis (60km/h). Atstumas tarp šiř žiburiř 15m, jie išdëstyti riedëjimo tako ašyje.
Riedëjimo tako šoniniai ir ašiniai žiburiai žymi atitinkamai riedëjimo tako ribas ir ašinć linijŕ. Šoniniai žiburiai išdëstyti 60m atstumu vienas nuo kito ir 3m atstumu nuo riedëjimo tako. Ašiniai žiburiai išdëstyti vienas nuo kito 30m atstumu, apvaliose riedëjimo tako dalyse atstumas tarp šiř žiburiř yra mažesnis.
Áspëjamieji žiburiai RT susikirtimo vietose naudojami eismo valdymui aerodrome, jie skirstomi á valdomuosius ir nevaldomuosius. Šie žiburiai leidžia arba draudžia judëti orlaiviams arba specialiesiems automobiliams aerodromo zonoje, nurodo perëjimo á riedëjimo takŕ ir á KTT (STOP linijos žiburiai), taip pat riedëjimo tako ir KTT numerius, teikia kitŕ informacijŕ.
KTT apsaugos žiburiai informuoja apie kliűtis aerodromo teritorijoje, kurios gali pakenkti lëktuvo kilimui ar tűpimui.
KTT praplatëjimo žiburiai žymi KTT praplatëjimŕ visu praplatëjimo perimetru, atstumai tarp šiř žiburiř ne didesni kaip 10 m ir ne daugiau kaip 3 m nuo KTT krašto.
KTT žiburiř áranga užtikrina saugř lëktuvo tűpimŕ ir kilimŕ iš abiejř KTT pusiř. Lëktuvui leidžiantis iš vienos KTT pusës, dalis žiburiř árangos, esančios kitame KTT gale, lieka nereikalinga (artëjimo žiburiai, šviesos horizontas ir kiti) [2].
1 pav. Aerodromo žiburiř sistemř išdëstymo schema
1 – KTT tűpimo žiburiai; 2 - slenksčio ir KTT galo žiburiai; 3 – artimasis radijo švyturys; 4 – tolimasis radijo švyturys; 5 – artëjimo žiburiai su impulsiniais šviesos šaltiniais; 6 – artëjimo žiburiai; 7 – šoninio horizonto žiburiai; 8 – šoniniai riedëjimo tako žiburiai; 9 – tűptinës žiburiai; 10 – KTT tűpimo zonos žiburiai; 11 – ašiniai KTT žiburiai; 12 – riedëjimo takř ašiniai žiburiai.
1.1.2 Sklendimo tűptinës (glisados) vizualaus stebëjimo sistemos
Vizualaus stebëjimo sistemŕ sudaro kelios tűptinës žiburiř grupës, kurios išdëstytos pagal skirtingas schemas. Tűptinës žiburiai užtikrina saugř lëktuvo tupdymŕ vertikalioje plokštumoje dienŕ ir naktá. Iki 1995m. buvo trys pagrindinës vizualaus tuptinës stebëjimo sistemos : VASI, 3BAR VASI ir T VASI. Jei naudojama tik dalis sistemos komplekto, tai prie sistemos žymëjimo prirašoma raidë A: AVASI, 3BAR AVASI ir AT VASI.
VASI ir AVASI sistemos naudojamos aerodromuose, kuriuose tupdomi orlaiviai, turintys ne didesná nei 4,5m atstumŕ tarp piloto akiř ir važiuoklës apatinio krašto. Sistemos 3BAR VASI ir 3BAR AVASI minëtas atstumas nuo 4,5 iki 16m. Naudojant T VASI sistemŕ šis atstumas nesvarbus.
Sistema VASI turi 12 žiburiř (2 pav.). Á jř sudëtá áeina dvi poros šoniniř horizontř (artimasis ir tolimasis), po 3 žiburius kiekviename horizonte. Kiekvienas tűptinës žiburys viršutinëje dalyje spinduliuoja baltŕ šviesŕ, apatinëje dalyje – raudonŕ. Pereinamoji zona iš baltos á raudonŕ šviesŕ yra 15’. Tűptinës žiburiř šviesos spinduliř kampai turi bűti sureguliuoti taip, kad pilotas iš kabinos matytř:
visi žiburiai raudoni, kai lëktuvas žemiau normaliosios tuptinës;
visi žiburiai balti, kai lëktuvas žemëja aukščiau normaliosios tuptinës;
artimieji šoniniai šviesos horizontai – balti, tolimieji – raudoni, kai lëktuvas žemëja normaliŕja tűptine.
AVASI sistemoje tűptinës žiburiai gali bűti išdëstyti taip: po vienŕ ar po du žiburius kiekviename šoniniame horizonte; vienoje KTT pusëje – po vienŕ, du ar tris žiburius kiekviename šoniniame horizonte.
Sistema 3 BAR VASI (3 pav.) turi 16 tűptinës žiburiř, kurie sudaro 3 poras šoniniř horizontř. Artimieji ir tolimieji horizontai turi po 3 žiburius, tolimieji – po 2 žiburius kiekviename horizonte.
Sistema 3 BAR AVASI susideda iš AVASI sistemos su 2 arba 3 tűptinës žiburiais kiekviename šoniniame horizonte.
Sistemř 3 BAR VASI ir 3 BAR AVASI žiburiř konstrukcija analogiška sistemř VASI ir AVASI žiburiř konstrukcijoms.
Žiűrint á tai, koks atstumas tarp piloto akiř ir važiuoklës apatinio krašto, išrenkamas tűptinës kampas, kurá formuoja artimasis ir vidurinysis šoniniai horizontai, arba tolimasis ir vidurinysis šoniniai horizontai. Kai minëtas atstumas ne didesnis nei 4,5m, išrenkamas artimasis ir vidurinysis šoniniai horizontai, kai šis atstumas nuo 4,5m iki 16m, išrenkamas vidurinysis ir tolimasis šoniniai horizontai.
Pilotas, stebintis artimŕjá ir vidurinájá šviesos horizontus, turi matyti: kai lëktuvas žemiau normaliosios tűptinës – visi šviesos horizontai spinduliuoja raudonŕ šviesŕ; kai lëktuvas aukščiau normaliosios tűptinës, artimojo ir vidurinio šviesos horizontř žiburiai spinduliuoja baltŕ, o tolimojo – raudonŕ šviesŕ; kai lëktuvas žymiai aukščiau normaliosios tűptinës – visi žiburiai spinduliuoja baltŕ šviesŕ; kai lëktuvas žemëja normaliŕja tűptine – artimojo šviesos horizonto žiburiai spinduliuoja baltŕ, tolimojo ir viduriniojo – raudonŕ šviesŕ.
Pilotas, stebintis viduriná ir tolimŕjá šviesos horizontus, turi matyti: kai lëktuvas truputá žemiau normaliosios tűptinës – artimasis šviesos horizontas baltas, vidurinysis ir tolimasis raudoni; žymiai žemiau tűptinës – visi žiburiai spinduliuoja raudonŕ šviesŕ; aukščiau tűptinës – visi žiburiai spinduliuoja baltŕ šviesŕ; kai lëktuvas žemëja normaliŕja tűptine – artimasis ir vidurinysis horizontai balti, tolimasis – raudonas.
Plyšinis tűptinës žiburys susideda iš šviesos šaltinio, raudonos šviesos filtro ir plyšio. Šviesos sklidimo kampas vertikalioje plokštumoje 7o ir (7o - 12,5 o) – horizontalioje plokštumoje. Didžiausias šviesos stiprumas – 60000 cd. Šviesos spindulys vertikalioje plokštumoje turi 3 spalvas: viršuje – balta, apačioje – raudona, viduryje – rausva.
Lćšinis tűptinës žiburys susideda iš šviesos šaltinio, raudonos šviesos filtro ir lćšio. Šiř žiburiř viršutinë šviesos srauto dalis – balta, apatinë – raudona. Spalvinës pereinamosios dalies beveik nëra.
Sistema T VASI turi 20 tűptinës žiburiř, simetriškai išdëstytř KTT ašies atžvilgiu. Sistema susideda iš šoniniř šviesos horizontř, turinčiř po 4 žibintus ir išilgai KTT ašies atžvilgiu išdëstytas žiburiř linijas. Šiř linijř žiburiai signalizuoja ”skrisk aukščiau” ir “skrisk žemiau”. Šios sistemos žiburiř spinduliuojama šviesa vertikalioje plokštumoje parodyta (4 pav.).
Šviesos horizontř žiburiai spinduliuoja raudonos šviesos spindulá iki 1o54’ nuo žemës paviršiaus ir baltos šviesos spindulá nuo 1o 54’ iki 6o.
Artimesni nurodomieji žiburiai signalizuoja “skrisk žemiau“ ir spinduliuoja baltŕ spindulá šiose ribose: nuo normaliosios tűptinës á viršř iki 6o. Normaliŕja tűptine nurodomieji žiburiai šviesos nespinduliuoja. Žiburiř “skrisk žemiau“ spinduliuojamos šviesos srauto kraštas eina ne normaliŕja tűptine, o 7’ ir 14’ aukščiau.
Nurodomieji žiburiai “skrisk aukščiau“ spinduliuoja baltŕ šviesŕ iki 1o 54’ nuo žemës paviršiaus. Artimesnieji nurodomieji žiburiai “skrisk aukščiau“ spinduliuojamas šviesos srautas sukoncentruotas nuo 1o 54’ iki normaliosios tűptinës kampo. Šie žiburiai šviesos nespinduliuoja šiose ribose: iki 5 ir 10’ žemiau normaliosios tűptinës kampo.
Jei orlaivis žemiau normaliosios tűptinës, tai pilotas matys tuptinës žiburius T raidës pavidalu, tai reiškia “skrisk žemiau“. Kai orlaivis žemëja nukrypćs žemiau kaip 1o normalios tűptinës atžvilgiu, tai visi žiburiai spinduliuos raudonŕ šviesŕ. Matomř žiburiř skaičius priklauso nuo orlaivio nukrypimo nuo optimalios tűpimo trajektorijos. Jei orlaivis žemëja normaliŕja tűptine, tai pilotas matys tik šoninius šviesos horizontus.
AT VASI sistemoje yra apie 10 žiburiř, išdëstytř tik vienoje KTT pusëje. Šie žiburiai analogiški T VASI sistemos žiburiams. T VASI ir AT VASI sistemos žiburiai informuoja ne tik apie tai, kad orlaivis nukrypćs nuo normaliosios tűptinës, bet ir kiek daug jis nukrypćs.
Tűptinës žiburiř spinduliavimo intensyvumas turi bűti toks, kad žiburius matytř ne mažesniu nei 7,4 km atstumu nuo jř.
Sistema VASI naudojama IV ir V-oje aerodromř žiburiř sistemose, 3BAR VASI – II ir III-ojoje sistemose, T VASI – I-ojoje sistemoje.
Tűptinës žiburiř sistema turi nuotoliná valdymŕ.
Kai šviesos stiprumas siekia 100%, žiburiai matomi iki 7 km atstumu dienŕ ir iki 12 km – naktá (kai geros oro sŕlygos). 100%-iná šviesos stiprumŕ patartina naudoti tik kai blogas matomumas arba kai lëktuvas skrenda priešais saulć. Kai matomumas normalus, pakanka naudoti 80% šviesos stiprumŕ (tai prailgina kaitinimo lempř veikimo laikŕ). Kai aplinka silpnai apšviesta (kylant, leidžiantis saulei, prieblanda) arba kai naktá matomumas nuo 4,8 km – naudojamas 30% šviesos stiprumas. Mažesná nei 30% šviesos stiprumŕ naudoti nepatartina, nes kaitinimo lempř spinduliuojamoje šviesoje yra nemažai raudonř spinduliř. Dël to padidëja pereinamoji zona tarp baltos ir raudonos šviesos.
ICAO rekomenduoja aerodromuose naudoti aukščiau išnagrinëtas sistemas: VASIS, T VASIS, PAPI ir jř modifikacijas AVASIS, 3 BAR VASIS, 3 BAR AVASIS, AT VASIS ir APAPI.
2 pav. Tűptinës žiburiř išdëstymo schema
a) VASI sistema; b) 3 BAR VASI sistema; c) T VASI sistema; 1-“skrisk žemiau“ nurodomieji žiburiai; 2- šoninis šviesos horizontas; 3- “skrisk aukščiau“ nurodomieji žiburiai
1o54’ 1o54’ at-10’ at-5’ 1o54’ at 1o54’ at at at+7’ at+14’

3 pav. T VASI sistemos žiburiř pastatymo kampai.
1-“skrisk žemiau“ nurodomieji žiburiai; 2- šoninis šviesos horizontas ; 3-“skrisk aukščiau“ nurodomieji žiburiai. Čia B- spinduliuojama balta šviesa, N- nespinduliuojama jokia šviesa, R- spinduliuojama raudona šviesa.
4 pav.a pavaizduotas VASIS sistemos žiburiř vaizdas, kurá pilotas mato leidžiantis lëktuvui:
1 – lëktuvas aukščiau normaliosios tűptinës;
2- lëktuvas leidžiasi normaliŕja tűptine;
3 – lëktuvas žemiau normaliosios tűptinës.
Kadangi pereinamoji zona tarp baltos ir raudonos šviesos yra rausvos spalvos, tai lëktuvui nukrypus nuo normaliosios tűptinës + 15o ribose, pilotas gali stebëti baltus ir rausvus arba raudonus ir rausvus šviesos horizontus. [
VASIS sistemos tikslumas:

čia
![]()
![]()
![]() prie reikšmiř
prie reikšmiř
turime
tada tiesinis VASIS sistemos tikslumas:
![]()
kampinis tikslumas:
|
|
T VASIS sistemos žiburiř vaizdas, kurá pilotas mato tupdydamas lëktuvŕ, parodytas 4 pav.b:
1 – “skrisk aukščiau“ signalas (visi žiburiai balti);
2 – lëktuvas skrenda normaliŕja tűptine;
3, 4 – “skrisk aukščiau“ signalas (raudoni arba balti žiburiai).
Kada lëktuvas leidžiasi pavojingai žemai, balta T formos žiburiř spinduliuojama šviesa pereina á raudonŕ.
T VASI sistemos tikslumas išreiškiamas ( 1 ) formule.
Tiesiniui ir kampiniui tikslumui apskaičiuoti naudojamos šios išraiškos:
![]()
![]()

tada

ir
![]()
čia H H ir pastatymo kampai parodyti 5 pav.
Lyginant VASI ir T VASI sistemas:
VASI sistema sukurta Didžiojoje Britanijoje 7-ame dešimtmetyje ir plačiai taikoma. Simboliř sudëtis VASI sistemoje susideda iš žiburiř spinduliuojamos šviesos kaitaliojimosi (priklausomai nuo lëktuvo nukrypimo nuo normaliosios tűptinës) ir iš šiř žiburiř atpažinimo (raudona – balta, raudona – rausva, balta – rausva). Šios sistemos žiburiai informuoja tik apie tai, kad lëktuvas skrenda normaliŕja tűptine arba lëktuvas nukrypćs nuo normaliosios tűptinës, bet nenurodo kiek daug nukrypćs.
Rausva žiburiř spalva signalizuoja, kad orlaivis yra tarpinëje padëtyje tarp tikslaus jo padëties (normaliosios tűptinës atžvilgiu) ávertinimo. Rausva žiburiř spalva neteikia jokios informacijos apie lëktuvo nuokrypŕ nuo normaliosios tűptinës.
Kai geros oro sŕlygos (geras matomumas), sumažinamas žiburiř spinduliuojamos šviesos stiprumas, dël to spinduliuojama šviesa ágauna gelsvŕ atspalvá.
T VASI sistema sudaryta taip, kad informacija apie lëktuvo nukrypimus nuo normaliosios tűptinës perduodama keičiantis šviesř geometrijai. Priklausomai nuo lëktuvo nukrypimo nuo normaliosios tűptinës, keičiasi matomos T raidës šviesř geometrija (kuo lëktuvas aukščiau ar žemiau normaliosios tűptinës, tuo trumpesnis T raidës kotas). T VASI sistema informuoja pilotŕ apie nuokrypos nuo normaliosios tuptinës dydá.
Viena iš svarbiausiř aukščiau minëtř sistemř charakteristikř yra nominalusis tikslumas. T VASI sistema apie mažiausiŕ nuokrypŕ informuoja tada, kai pasirodo pirmojo “skrisk žemiau“ arba “skrisk aukščiau“ nurodomojo žiburio spinduliuojama šviesa, o VASI sistemoje – kai raudona arba balta šviesa pereina á rausvŕ. T VASI sistemos tikslumas žymiai didesnis nei VASI sistemos [2].
a) b)
4 pav. VASIS žiburiř a) ir T VASIS žiburiř b) vaizdas iš skirtingř kampř.
b) a)
5 pav. VASI a) ir T VASI b) pastatymo kampai.
1.2 PAPI ir APAPI sistemř žiburiř reikšmë ir jř išdëstymo schema
1.2.1 PAPI ir APAPI sistemř analizë
Plačiausiai vartojama vizualinë tűptinës sistema – PAPI (angl. Precision Approach Path indicator). Teikia informacijŕ apie orlaivio nukrypimŕ nuo normaliosios tűptinës su nustatytu tikslumu. Ši sistema susideda iš dviejř šoniniř šviesos horizontř. Viename šoniniame horizonte 4 žibintai, vienas nuo kito išdëstyti 9 + 1 m atstumu. Artimiausias žiburys nuo KTT krašto ámontuotas 15m atstumu (8 pav.). Atstumas D1 gali keistis nuo 200 iki 400m priklausomai nuo ILS tuptinës, ratř aukščio atsargos virš KTT slenksčio ir nuo kitř parametrř. Kiekvienas žiburys skleidžia spindulá, išskaidytŕ á viršutiná baltŕ ir apatiná raudonŕ sektorius. Kai kada šie žiburiai montuojami priešingame KTT gale.
PAPI sistemos žiburiai, sudarantys šoniná šviesos horizontŕ, išdëstyti taip, kad pilotas matytř šá šviesos horizontŕ horizontalioje linijoje. Šios sistemos žiburiai ájungti dienŕ ir naktá. Šviesos spindulys matomas ne mažesnëse nei 1o 30’ ribose, aukščiau ar žemiau vidutinio pereinamojo sektoriaus. Horizontaliojoje plokštumoje (azimute) PAPI sistemos šviesos matomos ne mažesniame kaip 10o dienŕ ir 15o naktá intervale. Kai geras matomumas, PAPI sistemos žiburiř spinduliuojama šviesa matoma ne mažesniu kaip 7,4 km atstumu (aukščiau minëtř kampř ribose). Priklausomai nuo matomumo (oro sŕlygř), reguliuojamas žiburiř ryškumas (ávertinama ir piloto akinimo galimybë, kai per didelis ryškumas). Šiŕ sistemŕ galima naudoti, kai nereikalingos kitos specialios vizualiosios priemonës.
PAPI sistema turi diferencijuotus pastatymo kampus. Didžiausiŕ pastatymo kampŕ turi artimiausias KTT žiburys. Antrasis žiburys nuo kilimo ir tűpimo tako krašto turi 20’ mažesná pastatymo kampŕ nei pirmasis žiburys, trečiasis – 20’ mažesná pastatymo kampŕ nei antrasis žiburys ir t.t. Jei artëjant tűpti reikalaujamas 2o 40’ tuptinës kampas, tai šiam kampui užtikrinti žiburiai turi turëti šiuos pastatymo kampus (iš dešinës á kairć nuo KTT): 3o 10’, 2o 50’, 2o30’, 2o 10’ (6 ir 7 pav.).
PAPI šoninis horizontas gaminamas ir árengiamas taip, kad artëjančio tűpti orlaivio pilotas matytř (žr.á 6 ir 8pav.):
- skraidindamas orlaivá tűptine arba arti jos, matytř du arčiau KTT esančius žiburius (D, C) – raudonus, o du kitus, (B, A) toliau nuo KTT esančius žiburius – baltus (6 pav.-3);
skraidindamas orlaivá aukščiau tűptinës, matytř arčiausiai KTT esantá žiburá (D)- raudonŕ, o tris kitus žiburius (C, B, A)- baltus (6 pav.-2) , ir kai dar aukščiau tűptinës – matytř visus žiburius baltus (6 pav.-1) ;
skraidindamas orlaivá žemiau tűptinës, matytř 3 žiburius, (D, C, B), esančius arčiau KTT – raudonus, o likusá žiburá (A) – baltŕ (6 pav.-4), ir kai dar žemiau tűptinës, matytř visus žiburius raudonus (6 pav.-5);
Pastatymo kampai PAPI sistemoje yra tokie , kad pilotas, matydamas išorinius žibintus baltus, o likusius raudonus, praskristř pro visas kliűtis su pakankama aukščio atsarga.
PAPI sistemos šviesos horizontai išdëstyti simetriškai KTT ašies atžvilgiu. Kiekvieno šviesos horizonto žiburiř signalai keičiasi vienu metu.
Jei aerodrome árengto vizualaus tűptinës stebëjimo sistema ir ILS tai D (žr. 8 pav.) lygus atstumui tarp KTT galo ir ILS tűptinës pradžios ten, kur kodo numeriai: 1, 2 ir 3. Šis atstumas ne didesnis nei 120m tarp KTT slenksčio ir efektyvaus ILS tűptinës taško, kai kodo numeris 4 (ICAO terminologija).
Baltos šviesos perëjimas á raudonŕ labai staigus, pereinamoji zona tarp baltos ir raudonos šviesř ne didesnë nei 3’.
Žemëjant lëktuvui pilotas mato žiburius, pavaizduotus 6 pav.
Aukščiausiai žemës atžvilgiu sumontuoti PAPI žiburiai – artimiausi KTT-ui, žemiausiai – toliausi KTT-ui.
Dviejř vidiniř žiburiř pastatymo kampai sureguliuoti taip, kad jř suma, padalinta pusiau (B+C)/2 bűtř lygi normaliosios tűptinës trajektorijos kampui.
Baltos šviesos pasikeitimas á raudonŕ dviejuose vidiniuose žiburiuose vyksta 10’ aukščiau arba žemiau normaliosios tűptinës. Visř žiburiř pakitimas iš baltos šviesos á raudonŕ arba iš raudonos á baltŕ reiškia, kad lëktuvas skrenda 30’ aukščiau arba žemiau normaliosios tűptinës.
PAPI sistemos kampinis tikslumas lygus dviejř vidiniř žiburiř pastatymo kampř skirtumui, padalintam pusiau:

PAPI sistemos metrinis tikslumas didëja, orlaiviui artëjant prie žiburiř:
![]()
APAPI sistemos veikimo principas tas pats kaip ir PAPI sistemos, tik naudojamas vienas šviesos horizontas.
PAPI sistema daug tikslesnë nei VASI sistema, dël to VASI sistema daug kur keičiama PAPI sistemŕ. Be to šiř dviejř sistemř žiburiř konstrukcijos panašios.
Pereinamoji zona PAPI ir VASI sistemose atitinkamai 3’ ir 15’. VASI sistema informuoja tik apie lëktuvo nukrypimŕ nuo normaliosios tűptinës, o PAPI sistema informuoja apie nuokrypio dydá, pilotas tiksliai žino orlaivio nukrypimŕ nuo normaliosios tűptinës. PAPI sistemos žiburio spindulio kanalas labiau sukoncentruotas nei VASI sistemos. VASI sistemos žiburiř pereinamoji zona tarp raudonos ir baltos šviesř priklauso nuo lëktuvo atstumo iki KTT. PAPI sistemoje pereinamoji zona pastovi. PAPI sistemos šviesř kitimo greitis informuoja pilotŕ apie nukrypimo nuo normaliosios tűptinës greitá ir kryptá. PAPI sistema yra suderinta su ILS, todël ja galima vadovautis, kai lëktuvo aukštis nuo žemës paviršiaus 30m, o VASI sistemoje šis aukštis yra 60m. T VASI sistema teikia daugiau informacijos nei PAPI sistema, tačiau T VASI sistema turi daugiau žiburiř, jř konstrukcija ir suderinimas sudëtingesni. PAPI sistema tinkama naudoti, kai oro sŕlygos geros arba vidutinës. [
6 pav. PAPI sistemos
žiburiř vaizdas iš skirtingř kampř![]()
7 pav. PAPI sistemos pastatymo kampai
1-šoninis šviesos horizontas, 2-KTT slenkstis, B – spinduliuojama balta šviesa, R – spinduliuojama raudona šviesa, N – nespinduliuojama jokia šviesa
8 pav. PAPI žiburiř išdëstymo schema
1.2.2 PAPI sistemos áranga kilimo ir tűpimo take be ILS sistemos
Kuomet kilimo tűpimo take nëra árengta ILS (angl.instrument landing system, tűpimo pagal prietaisus sistema) orlaivio sklendimŕ tűptinës trajektorija užtikrina PAPI sistema. Priklausomai nuo atstumo tarp piloto akiř ir priekinës važiuoklës išleisto rato, orlaiviai skirstomi á keturias grupes. 2 lentelëje nurodytos šios keturios grupës pagal PAPI ir APAPI sistemas (nurodyta ICAO reikalavimuose 14 straipsnyje).
2 lentelë. Orlaiviř klasifikacija pagal atstumŕ nuo piloto akiř iki priekinio rato
|
Atstumas tarp piloto akiř ir priekinio rato |
Pageidautinas santykinis ratř aukštis nuo KTT slenksčio |
Minimalus santykinis ratř aukštis nuo KTT slenksčio |
|
Iki 3m | ||
|
Nuo 3 iki 5m | ||
|
Nuo 5 iki 8m | ||
|
Nuo 8 iki14m |
Árengiant PAPI ar APAPI sistemas ir parenkant orlaiviř klasć reikalingi skaičiavimai. Reikalaujama, kad bűtř nustatytas atstumas tarp piloto akiř ir priekinio rato (EWH). Galima 2 lentelës 2 stulpelyje pateiktas reikšmes sumažinti iki 3 stulpelyje pateiktř reikšmiř, tačiau aeronavigacijos tyrimais turi bűti nustatyta, kad tai priimtinas variantas. 9 paveiksle parodytas ratř aukštis virš KTT slenksčio (WTH) ir akiř aukštis virš priekinio išleisto rato (EWH).
Kad užtikrinti reikiamŕ EWH ir WTH PAPI sistemos žiburiř atstumas nuo KTT slenksčio apskaičiuojamas pagal formulć:
![]() (11)
(11)
čia EWH – atstumas nuo piloto akiř iki priekinio išleisto rato (m);
WTH – atstumas nuo priekinio išleisto rato iki KTT slenksčio (m);
Q2 - sklendimo tűptinës kampas minus 10’ (Q-10
Kliűčiř perskridimo aukštis (OCS) apribotas kliűčiř perskridimo paviršiumi (10 pav.). Šis paviršius yra 15 km ilgio. OCS polinkis apskaičiuojamas pagal formulć:
Jei sklendimo tűptinë yra 3o, tai OCS polinkis turi bűti:
![]() .
.
Turi bűti patikrinta, ar joks objektas nekerta paviršiaus [7].
9 pav. Atstumas nuo piloto akiř iki priekinio rato (EWH ir nuo priekinio rato iki KTT slenksčio (WTH)
10 pav. Kliűties perskridimo paviršius:
a) horizontaliojoje plokštumoje, b) vertikaliojoje plokštumoje.
Jei kliűtis yra aukščiau OCS, turi bűti imtasi tokiř priemoniř:
a) pašalinti kliűtá, jei tai ámanoma;
b) sklendimo tűptinë gali bűti atitinkamai perkelta;
c) sistemos ašis ir su ja susijćs kliűties perskridimo paviršius gali bűti pasukti ne daugiau kaip 15o;
d) KTT slenkstis gali bűti atitinkamai perkeltas;
e) PAPI sistemos žiburiai perkeliami toliau nuo KTT slenksčio taip, kad sklendimo tűptinë bűtř aukščiau buvusios dydžiu H (3 pav.), H lygus kliűties aukščiui virš kliűties perskridimo paviršiaus (OCS). [7]
11 pav. Koreguotas PAPI sistemos žiburiř išdëstymas ávertinant kliűties aukštá virš OCS
H skaičiuojamas pagal formulć:
![]() ; (13)
; (13)
čia D – atstumas nuo slenksčio iki kliűties (m);
L – visas kliűties aukštis nuo slenksčio lygio (m);
H – kliűties aukštis virš OCS;
Q2 - sklendimo tuptinës kampas;
Koreguotas PAPI sistemos žiburiř išdëstymo atstumas nuo KTT slenksčio skaičiuojamas pagal formulć:
![]() ; (14)
; (14)
1.2.3. PAPI sistemos derinimas su ILS
Montuojant PAPI sistemos žiburius prie KTT, kuriame árengta ILS (instrument landung system, angl. tűpimo pagal prietaisus sistema), pageidautina, kad bűtř suderintos vizualinës ir nevizualinës sklendimo tűptinës (tarp PAPI ir ILS). Orlaiviui sklendžiant atstumas tarp piloto akiř ir orlaivio pozicijos kinta, todël atsiranda sunkumř siekiant harmonizacijos tarp PAPI ir ILS. Užtikrinti šia harmonizacijŕ iki tűpimo taško yra sunku, tačiau derinimas turi bűti vykdomas kuo arčiau KTT slenksčio. Priimtinŕ metodŕ rekomenduoja ICAO, kuriuo visi orlaiviai klasifikuojami á 3 grupes, ávertinant atstumŕ nuo piloto akiř iki skrydžio aukščio vertikaliojoje plokštumoje. Orlaiviř klasifikacija pagal minëtus parametrus pateikta 3 lentelëje.
3 lentelë. Orlaiviř klasifikavimas pagal atstumŕ tarp piloto akiř ir skrydžio aukščio
Atsumas nuo piloto akiř iki skrydžio auščio |
Orlaivio klasë |
|
Nuo 3,7 iki 6,7 m |
Dideli orlaiviai |
|
Nuo 1,3 iki 3,7 m |
Vidutiniai orlaiviai |
|
Iki 1,3 m |
Maži orlaiviai |
Atstumas nuo PAPI žiburiř iki ILS árangos KTT ašies kryptimi apskaičiuojamas pagal formulć:
![]() ; (15)
; (15)
čia Q - sklendimo tuptinës kampas;
AEAHR – nominalus atstumas tarp piloto akiř ir skrydžio aukščio (m), žiűrint 3 lentelć.
Dideliam lëktuvui sklendimo tűptinës kampas lygus 3o, tada
![]() ; (16)
; (16)
Paprastai ILS sklendimo tűptinë sureguliuota taip, kad orlaivis KTT slenkstá praskristř 15 m aukštyje.
ILS nuotolis nuo KTT slenksčio apskaičiuojamas pagal šiŕ formulć:
![]() ; (17)
; (17)
PAPI nuotolis nuo KTT slenksčio apskaičiuojamas pagal formulć:
![]() ; (18)
; (18)
ICAO duomenimis šis metodas užtikrina suderintimŕ tarp PAPI ir ILS dideliems orlaiviams, tačiau aukštis nuo KTT slenksčio iki orlaivio rato nepakankamas kritinës bűsenos orlaiviams
11 formulć perrašom taip:
![]() . (19)
. (19)
Pagal 9 paveikslŕ D1 pakeistas D4.
Kaip ir EWH, WTH turi bűti nustatytas ir neviršyti minimaliř reikšmiř (žr. 2 lentelć).
Pvz.: PAPI žiburiai árengti 386m nuotoliu nuo KTT slenksčio, reikia apskaičiuoti B 747 atstumŕ nuo rato iki KTT slenksčio (kai ratas virš slenksčio) WTH :
![]() , (20)
, (20)
iš to matyti, kad:
![]() .
.
Gautas WTH viršija 2 lentelëje pateiktas minimalias reikšmes. [7]
12 pav. Suderinimas tarp PAPI ir ILS, teorinis pavyzdys
ICAO duotos formulës WTH ir EWH parametrams apskaičiuoti taikomos ir kritinës bűsenos orlaiviams. 12 paveikslëlyje parodytas PAPI ir ILS suderinimas. Naudojant šá harmonizacijos bűdŕ nustatomas taškas C, už kurio piloto akys nukrypsta nuo PAPI sklendimo tűptinës, tuo tarpu pilotas orientuojasi pagal ILS sklendimo tűptinć.
Atstumas D5 (13 pav.) gali bűti netinkamas, tada ILS ir PAPI suderinimas nebepriklausys nuo KTT slenksčio. 13 paveiksëlyje parodyti skaičiavimai (tinka B 747), čia PAPI sistemos žiburiai árengti 386m nuotoliu nuo KTT slenksčio (pagal anksčiau nagrinëtŕ pavyzdá).
 ; (21)
; (21)
Iš pateikto skaičiavimo aišku, kad orlaiviui (tiksliau piloto akims) priartëjus prie ribos, nuo kurios KTT slenkstis yra už 15,9m, Boeing 747 lëktuvo pilotas turi vadovautis tik ILS árangos duomenimis.
13 pav. Suderinimas tarp PAPI ir ILS, praktinis pavyzdys
Laikoma, kad visos nagrinëtos PAPI sistemos šviesŕ spinduliuoja nuo KTT slenksčio lygio, t.y. iš to pačio aukščio, kaip ir KTT slenkstis. Keičiant PAPI sistemos išdëstymŕ, reikia kompensuoti kai kuriuos parametrus. Šie pakeitimai turi bűti á KTT slenksčio pusć nuo tűptinës žiburiř, jei teorinë tűptinës žiburiai yra aukščiau KTT slenksčio, jei žemiau, pakeitimai vykdomi toliau nuo KTT slenksčio. Šie pakeitimai turi bűti vykdomi ávertinant faktinius žiburiř išdëstymo parametrus ir reljefŕ .
PAPI sistemos žiburiai gali bűti pakelti nuo žemës paviršiaus nuo 45 cm iki 90 cm aukštyje. Šiame diapazone lieka 45 cm galimiems pakeitimams.
14 paveikslëlyje parodyta, kaip árengiami tűptinës žiburiai, kai KKT šlaitai turi nuolydá.
14 pav. Tűptinës žiburiř áranga KTT šlaite
1.3 Tűptinës sistemř maitinimo schemos ir šviesos šaltiniai
1.3.1 Tűptinës žiburiř árengimas ir maitinimo schemos
PAPI sistemos žiburiai abiejose KTT pusëse ájungti á atskirus maitinimo sistemos tinklus ir valdomi atskirais ryškio reguliatoriais. Patikimumui padidinti keturi vienos pusës tűptinës žiburiai maitinami iš atskiro tinklo. Kiekviena lempa maitinama iš savojo izoliuojančiojo transformatoriaus. 15 ir 16 paveiksluose pavaizduotas tűptinës žiburiř maitinimo schemos atitinkamai APAPI ir PAPI sistemoms.
15 ir 16 paveikslëlyje pavaizduoti elektros grandinës išrinkimo árenginys ryškio reguliatoriř sujungia su tos KTT pusës žiburiais, iš kurios artëja orlaivis. PAPI sistemoje yra du elektros grandinës išrinkimo árenginiai. Vienas iš jř prijungtas prie dešiniosios KTT pusës tuptinës žiburiř, kitas prie kairiosios. Ši maitinimo sistema nors ir brangi, tačiau patikima, nes vienam tűptinës žiburiř šoniniam horizontui neveikiant, kitas vis tiek veiks, nes šoniniai šviesos horizontai maitinami iš atskirř ryškio reguliatoriř.
15 pav. APAPI sistemos maitinimo schema
17 paveiksle pavaizduota tűptinës žiburio maitinimo su nebűtinu apšildymu sistema. Kiekviena lempa maitinama iš savojo izoliuojančio transformatoriaus (žr. 19 pav.). Izoliuojančiřjř transformatoriř galia 200 W. Abiejř žiburio lempř izoliuojantys transformatoriai sujungti á vienŕ sistemŕ, kaip ir gretimi žiburiai.
3BAR VASI sistemos maitinimo schema pavaizduota 18 paveikslëlyje. Kiekvieno tűptinës žiburio viduje árengti 3 prožektoriai, kuriuose yra 6,6A, 200W kaitinimo lempos. Kiekvienas prožektorius maitinamas iš savojo izoliuojančiojo transformatoriaus, o tűptinës žiburiai maitinami dviem ar trimis aukštos átampos kabelinëmis linijomis. Kiekviena kabelinë linija turi savŕjá ryškio reguliatoriř.
Žiburys montuojamas ant betoninio bloko, prieš árengiant reikia ištirti dirvŕ, išvalyti žemës paviršiř. Žiburiai turi bűti árengiami kuo arčiau žemës paviršiaus. Jei žemës paviršiaus nelygumai nežyműs, pakeitimai nereikalingi. Izoliuojantys (skiriamieji) transformatoriai árengiami žemëje arba duobëje patalpintame specialiame inde (19 pav., a ir b).
Tűptinës žiburiai laikosi ant metaliniř kojř, kuriř sujungimai yra labai trapűs ir neatsparűs dideliems mechaniniams krűviams.
16 pav. PAPI sistemos maitinimo schema
17 pav. PAPI žiburio lempř maitinimas per izoliuojančius transformatorius
18 pav. 3 BAR VASI sistemos žiburiř maitinimo schema
19 pav. PAPI žiburio ir izoliuojančiřjř transformatoriř árengimas
PAPI žiburiř konstrukcija parodyta 20 paveikslëlyje. Kiekvienas žiburys turi po 2 halogeno lempas, átaisytas reflektoriuose, po du raudonus filtrus ir po du lćšius, kurie sukoncentruoja nuo reflektoriaus atspindëtŕ šviesŕ.
VASI plyšiniř žiburiř konstrukcija ir šviesos spinduliavimo kampai pavaizduoti 21 paveikslëlyje. Plyšiniuose žiburiuose nëra spindulá sukoncentruojančiř lćšiř. Šviesos spindulys, atsispindëjćs nuo reflektoriaus tiesiogiai per filtrŕ ir per plyšá sklinda á aplinkŕ.
20 pav. PAPI sistemos žiburio konstrukcija: a) vaizdas iš profilio, b) vaizdas iš viršaus
21 paveikslëlyje pavaizduoti: 1- aliuminio korpusas; 2 – lćšis; 3 – raudonas filtras; 4 – halogeno lempa; 5 – reflektorius; 6 – maitinimo kabelis; 7 – laikančios kojos; 8 – betoninis pagrindas.
21 pav. VASI sistemos žiburio konstrukcija ir skleidžiami spinduliai
1 – raudonas filtras, 2 – blyškiai melsvas filtras, 3 – plyšys, 4 – baltos šviesos sektorius, 5 – rausvos spalvos sektorius, 6 – raudonos spalvos sektorius
1.3.2 PAPI sistemos šviesos šaltiniai ir jř charakteristikos
PAPI sistemos žiburiř baltos ir raudonos šviesř maksimalűs ir minimalűs stiprumai parodyti 4 lentelëje. Čia pateiktos šviesos stiprumo reikšmës užtikrinamos nurodytř kampř ribose KTT ašies atžvilgiu. Šioje lentelëje pateikti PPL 400 tipo žiburio duomenys, tačiau kitř tipř PAPI žiburiř atitinkami duomenys pagal ICAO reikalavimus neturi daug skirtis [7].
4 lentelë. PAPI sistemos žiburiř šviesos stiprumo sklaida
|
PPL 400 |
Reikšmës |
|||
|
Didžiausias šviesos stiprumas Cd(kandelomis) |
Mažiausias šviesos stiprumas Cd(kandelomis) |
Spindulio sklaida |
||
|
Horizontalioje plokštumoje |
Vertikalioje plokštumoje |
|||
|
Balta šviesa Raudona šviesa Balta šviesa Raudona šviesa |
-2o iki +2o -2o iki +2o -8o iki +8o -8o iki +8o |
-2o iki +2o -2o iki +2o -3,5o iki +3,5o -3,5o iki +3,5o |
||
22 pav. Šviesos stiprumo sklaida horizontaliojoje ir vertikaliojoje plokštumose
22 paveikslëlyje parodytos ICAO reikalaujamos ir naudojamos sistemos žiburiř šviesos stiprumo reikšmës.
23 paveikslëlyje pavaizduotas grafikas rodo, kad raudonos šviesos stiprumas vertikaliojoje plokštumoje kinta mažesnëse ribose nei balta šviesa. Tai vyksta dël slopinančio filtrř poveikio. [7]
23 pav. Mini PAPI sistemos žiburiř šviesos stiprumo sklaidos grafikas
Ištisinë linija rodo šviesos stiprumo sklaidŕ horizontaliojoje plokštumoje, punktyrinë – vertikaliojoje plokštumoje.
24 paveikslëlyje pavaizduotas VASI sistemos AWF – 320 tipo žiburiř šviesos stiprumo sklaida, priklausomai nuo nukrypimo nuo normaliosios tűptinës. Rausva spinduliř spalva reiškia perëjimŕ iš baltos šviesos sektoriř á raudonos šviesos sektoriř. Ši pereinamoji zona yra žymiai didesnë už PAPI sistemos žiburiř.
24 pav. VASI sistemos AWF – 320 tipo žiburiř šviesos stiprumo sklaidos grafikas
Punktyrinë linija rodo rausvř spinduliř sektoriř, brűkšniuota linija – raudonř spinduliř sektoriř, H – horizontaliojoje plokštumoje, V – vertikaliojoje plokštumoje.
Pagrindiniai šviesos šaltiniai yra: aerodrominës kaitinimo lempos, dujinës išlydžio lempos ir impulsiniai šviesos šaltiniai.
Kaitinimo lempos sudarytos iš stiklinës kolbos, kaitinimo siűlelio ir cokolio. Pagal kolbos formŕ aerodromř lempos bűna lašo, rutulio formos, cilindrinës ir pan. Cokoliai bűna su sriegiu ir pleištiniai. Kaitinimo siűlelis gaminamas iš volframo vielos, susuktos á spiralć. Srovë, tekanti per siűlelá já ákaitina iki tokios temperatűros, kad jis pradeda spinduliuoti energijŕ, kurios dalá šviesos pavidale mato akis. Kaisdamas siűlelis išgaruoja, kolboje nusëda metalo garai, mažëja lempos ryškis ir siűlelis perdega. Kad sumažinti volframo siűlelio garavimŕ, kolba užpildoma inertinëmis dujomis. Mažos galios lempos – 15, 25, 40 ir 60 W lempos, kuriř átampa 110, 127 ir 220 V dujomis neužpildomos. Lempos užpildomos 86 % argono ir 14 % azoto dujř mišiniu. Civilinëje aviacijoje paplitć halogeninës kaitinimo lempos (HKL), kurios naudojamos PAPI sistemoje. Jř ryškumas didesnis, mažesni gabaritai, turi ilgesná tarnavimo laikŕ, negu paprastos kaitinimo lempos. Jř cilindrinë kolba užpildoma bromu, chloru ir jodu. Dël to jos vadinamos kvarcinëmis halogeninëmis lempomis arba kaitinimo lempomis su volframo halogeniniu ciklu. Šviečiant lempai tokio ciklo metu volframo atomai išlëkć iš siűlelio nusëda ant kolbos sieneliř, dujinëje aplinkoje vël grážta á siűlelá. Tokiu bűdu vyksta siűlelio atsistatymo procesas.
Aerodromř šviesos árenginiuose naudojamos tokiř tipř kaitinimo lempos: A – 28, 12 V, 5 cd; A – 12, 12 V, 21 cd; PŽ – 6,6 – 300 – 1, 300W, 6,6 A; PŽ – 6,6 – 200 – 1, 200 W, 6,6 A; KGM – 6,6 – 200 – 1 (bűna 100 ir 200W); GREF311 721190, 100 W, 6,6 A, GRE 311 2117, 200 W, 6,6 A; SM – 26 – 25V, 24 V, 20 W; SM – 28 – 80, 24 V, 65 W; Tesla 600, 12 ir 24 V, 15W; Narva , 24 V, 45 W, Narva 24 V, 15 W ir kt.
Kokybiškesnës yra didesná ryšká turinčios dujinio išlydžio lempos. Jř spinduliuojamoje energijoje yra žymiai mažiau infraraudonřjř ir ultravioletiniř spinduliř, kurie duoda tik šiluminá poveiká. Jose kaitinimo siűlelio nëra, o šviesa išspinduliuojama dël elektros išlydžio, vykstančio dujose tarp dviejř elektrodř.
1.4 Žiburiř kontrolinës sistemos
Kontrolës sistemos tikrinimo etapai:
Paduodant elektriná signalŕ iš tolimo kontrolës punkto, á apšvietimo sistemos grandis, reguliatorius su atitinkamomis sistemomis pradeda tikrinimo etapŕ. Šviesos intencyvumas yra pateikiamas skalëje, išreikštas procentais, yra lyginas su užduota srove, kuri teka grandinëmis.
Jei faktinë vertë kinta tuomet reguliatorius automatiškai išsijungia. Šiuo atveju I < Imin.
Tuo tikslu yra statomi specuialűs grandiniř saugikliai, kurie apsaugo grandiniř lempas ir grandines nuo perdegimo. Jei grandinës srovë yra didesnë nei užduotoji, tuomet ásijungia avarinis grandinës nukirtimo rëžimas, ko pasekoje reguliatoriaus darbas yra blokuojamas [9].
2. PROJEKTINË DALIS
Šio darbo tikslas pateikti automatinć aerodromř žiburiř veikimo kontrolës sistemŕ, kuri leistř efektyviau bei patikimiau aptarnauti aerodromř šviesos árenginiř sistemas. Praktiškai nëra skirtumo kokiai šviesos árenginiř sistemai taikysime automatinć žiburiř veikimo kontrolës sistemŕ, nes jos darbas nepriklauso nuo to kiek sistemoje yra žiburiř, - veikimo principas išlieka toks pat. Automatinë žiburiř veikimo kontrolës sistema turi dirbti ištisŕ parŕ ir išjungiama tik tais atvejais, kada aerodromas neveikia.
Dabar žiburiř kontrolë atliekama profiklaktiškai apeinant ir vizualiai apžiűrint šviesos árenginius. Tokia profilaktinë patikra užima daug laiko ir nëra efektyvi, profilaktokos metu stabdomas KTT darbas.
Kaip alternatyvŕ á ateitá siűlau ádiegti automatinć aerodromř žiburiř veikimo kontrolës sistemŕ, kuri tikrintř kiekvienŕ švyturá atskirai, jř grupes, kontroliuotř švyturiř eksploatavimo laikŕ, ko pasekoje leistř efektyviai optimizuoti aerodromř šviesos árenginiř aptarnavimŕ. Struktűrinës schemos nagrinëjimas pateiktas žemesniuose punktuose.
2.1 Principiniës schemos projektavimas
Davikliai
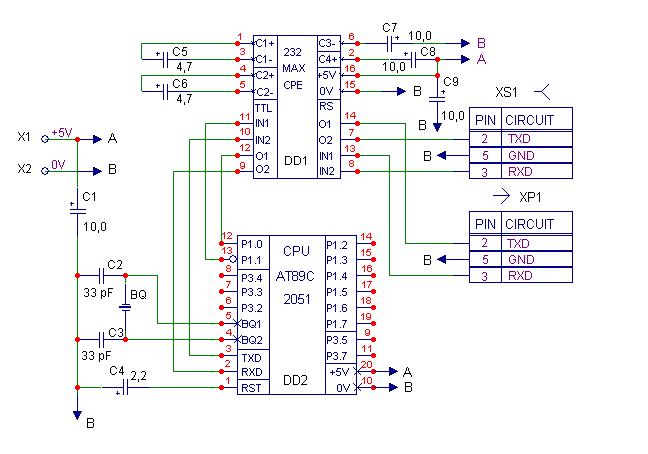
Principinë daviklio schema kartu su impulsř generatoriumi ir dešifratoriumi parodyta 29 paveikslëlyje. Automatinëje kontrolëje svarbiŕ funkcijŕ atlieka šviesos davikliai. Davikliai reaguos á šviesos nuokrypas nuo nominalios užduotos vertës. Pagrindiniai daviklio elementai tai optronai bei mikroprocrsorius. Optronř VT1 pagalba mikroprocesurius priima, keičia ASK á SAK ir siunčia informacijŕ á tinklŕ.
2.1.2 Universalus analoginis interfeisas
Principinë interfeiso schema nuosekliam portui parodyta 26 paveiksle.
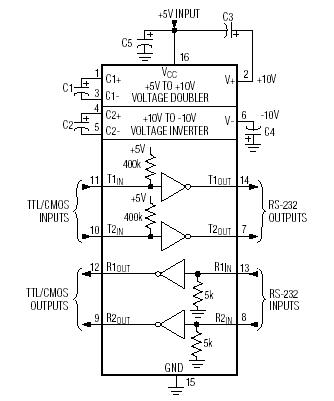
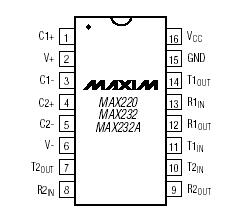
25 pav. Mikroschemos MAX 232 A bendras vaizdas ir struktűrinë schema.
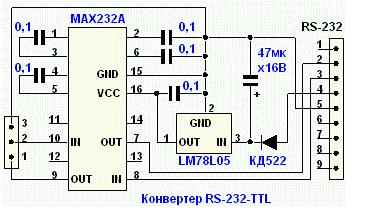
26 pav. Principinë interfeiso schema nuosekliam portui.
Pagrindinë schemos dalis yra 8 skličiř ASK / SAK 25 pav. Mikropocesoriai naudojame daugelio automatiniř átaisř gamyboje, kuriuos labai dažnai pravartu bei patogu sujungti su personaliniu kompjuteriu per nuoseklřjá portŕ. Tačiau tiesiogiai to padaryti neámanoma, nes pagal RS-232 perduodamř signalř lygiai yra -3.-15 V (loginis vienetas) ir +3+15 V (loginis 0). Signalo performavimui iš sakitmeninio signalo RS-232 á standartiná loginá TTL signalŕ ir atvirksčiai paprastai naudojamos signalo keitimo schemos.
Pagirndŕ pateikiamo keitiklio sudaro plačiai naudojama mikroschema MAX 232 A, kuri turi daug kitř analogř. Duotoji mikroschema apskaičiuota 5V átampai, ji turi ámontuotŕ átampos daugintuvŕ, kuris átampŕ ant perjungiamř kondensatoriaus gnybtř padidina iki ±10 V. Tokia átampa bűtina darbui su RS 232 signalais. Mikroschemos darbui bűtini 4 išoriniai kondensatoriai kuriř talpa 0,1 mkF. Šie kondensatoriai naudojami átampos keitiklyje. Pateiktoji schema gali bűti maitinama ir iš personalinio kompiuterio com orto, tačiau šiuo atveju sistemai tai nebűtina. 5 V pastovi átampa sudaroma, o taip pat ir ltginama mažos galios stabilizatoriumi LM78L05, kurios áejimas sujungtas su matinimo filtro kondensatoriumi. Šis ASK turi du analoginius áëjimŕ ir du áëjimus pajungimui atraminës átampos (REF+ ir REF-). Jeigu REF- taip pat pajungtumëm á bendrŕ laidŕ (GND), ASK formuos išëjimo kodo baitus, esant nulinei átampai analoginiame išëjime, lygius 00000000 ir 11111111 – kai áëjimo átampa bűtř lygi atraminei átampai REF+. Vcc – mikroschemos maitinimo átampa. I/O CLOCK – áëjimo/išëjimo taktiniai impulsai. DATA OUT – sinchroninis duomenř išvedimas. CS – formuoja keitiklio darbŕ.
2.1.3 Kodř generatorius/dešifratorius
Šiuolaikiniř mikrovaldikliř pasirinkimas yra labai didelis. Tai Z80, PIC, Intel’35, Intel’51, Intel’52, AVR ir kt. serijos. Z80 ir Intel’35 serijos jau yra pasenusios ir praktiškai naujai kuriamoje árangoje nenaudojamos. AVR serijos mikrovaldikliai yra labai patogűs ir perspektyvűs SPI interfeiso dëka, kuris suteikia galimybć vykdyti programos korekcijŕ ir emuliacijŕ, neišimant mikrovaldiklio iš schemos. Tačiau savo darbe jř netaikau. Labiausiai paplitć šiuo metu yra MCS 51 serijos mikrovaldikliai. Tai yra dël keliř priežasčiř. Visř pirma, jie yra labai universalűs, turi pakankamai galingŕ adresacijŕ bei komandř rinkiná, penkiř lygiř pertraukčiř sistemŕ ir FLASH tipo 2 kilobaitř programinć atmintá. Kitř serijř mikrovaldikliai yra labiau specializuoti. Bűtř galima naudoti Intel’52 serijos mikrovaldiklius kurie yra tokie patys kaip ir 51 serijos, tik turi savyje ASK, 8 kanalř multiplekserá ir kitus árenginius. Tačiau kadangi mums reikia komutuoti 13 kanalř, bei derinti signalo mastelá nëra prasmës jo naudoti. Todël naudosime Intel’51 serijos mikrovaldiklá AT89C2051, pagamintŕ “ATMEL” firmos.
Pagrindiniai mikroprocesoriaus AT89C2051 ypatumai:
2 kB programř atminties;
2,7 V – 6 V veikimo átampos diapazonas;
Pilnutinis statinis veikimas: 0Hz – 24 MHz;
Dviejř lygiř duomenř apsauga;
128 kB vidinë aštuoniř skilčiř operatyvioji atmintis;
15 programuojamř linijiniř áëjimř / išëjimř;
du šešiolikos skilčiř skaitikliai;
šeši pertraukčiř šaltiniai;
nuoseklus duomenř ávedimas;
yra vidinis komparatorius.
Mikroprocesoriaus AT89C2051 išvadř paskirtis parodyta 27 pav.
VCC – matinimo átampa;
GND – bendras išvadas;
RST – pradinio nustatymo áëjimas;
P 1.0 iki P 1.7 – pirmas aštuoniaskiltis ávesties / išvestiesportas;
P 3.0 iki P 3.5 ir P 3.7 – trečias aštuoniaskiltis portas.
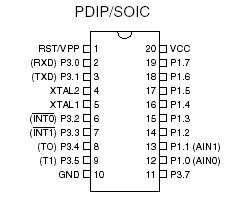
27 pav. Mikroprocesoriaus AT89C2051 išvadř paskirtis.
P 3.0 RXD nuoseklus ávesties portas;
P 3.1 TXD nuoseklus informacijos išvesties portas;
P 3.2 Vidiniř pertraukčiř INT0 áëjimas;
P 3.3 Vidiniř pertraukčiř INT1 áëjimas;
P 3.4 Skaitiklio áëjimas 0: - T0;
P 3.5 Skaitiklio áëjimas 1: - T1;
P 3.7 Duomenř signalo, nuskaitančio duomenis iš vidinës atminties, išëjimas;
XTAL1 – kvarcinio rezonatoriaus áëjimas;
XTAL2 – kvarcinio rezonatoriaus išëjmas;
Specialiř funkcijř registrai (SFR,) ir jř adresai pateikiami 3.1 lentelëje.
Akumuliatorius. ACC – akumuliatoriaus registras. Komandos skirtos darbui su akumuliatoriumi, naudoja mnemonikŕ “A”, pavyzdžiui, MOV A, P2. Mnemonika “ACC” naudojama, pavyzdžiui, bitiniui akumuliatoriaus adresavimui. Taip, simboliškas penkto akumuliatoriaus bito pavadinimas, naudojant asemblerá, atrodys: ACC 5.
Registras B. Naudojamas daugybos bei dalybos operacijose. Kitose funcijose registas B gali bűti naudojamas kaip labai operatyvus registras.
Programos bűsenos registras. Registre PSW laikoma informacija apie programos bűsenŕ.
Dëklo rodiklis SP. 8 bitř registras, kurio turinys prieš árašant ir naudojant komands PUCH ir CALL inkrementuojamas dëklŕ. O nustatymo metu dëklo rodiklis nustatomas á 07H. Duomenys prasideda nuo 08H. Esant bűtinybei, dëklo rodiklis gali bűti perkeltas á kitŕ sritá.
5 lentelë. Specialiřjř funkcijř registrai bei jř adresai.
|
Žymëjimas |
Pavadinimas |
Adresas |
|
CC B PSW SP DPTR DPL DPH P1 P3 IP IE TMOD TCON TH0 TL0 TH1 TL1 SCON SBUF PCON |
Akumuliatorius Registras B Programos bűsenos registras Dëklo rodiklis Baito rodiklis. 2 baitai: Žemesnysis baitas Aukštesnysis baitas 1 portas 3 portas Pertraukčiř prioriteto registras Pertraukčiř leidimo registras Skaitiklio režimř registras Skaitiklio valdymo registras Skaitiklio 0 aukštesnysis baitas Skaitiklio 0 žemesnysis baitas Skaitiklio 1 aukštesnysis baitas Skaitiklio 1 žemesnysis baitas Nuoseklaus porto valdiklis Nuoseklaus porto buferis Valdiklio išëjimas |
0E0H 0F0H 0D0H 81H 82H 83H 90H 0B0H 0B8H 0A8H 89H 88H 8CH 8AH 8DH 8BH 98H 99H 87H |
Duomenř rodiklis. Duomenř rodiklis (DPTR) susideda iš aukštesniojo baito (DPH) ir žemesniojo baito (DPL). Já sudaro 16 bitř. Gali bűti naudojamas kaip vienas nepriklausomas 16 bitř registras arba kaip du nepriklausomi 8 bitř registrai.
Nuoseklaus porto buferis. SBUF susideda iš dviejř nuosekliř registrř: buferinio siřstuvo ir buferinio imtuvo. Duomenř kodai árašomi á SBUF, jie patenka á buferiná siřstuvŕ, baito árašŕ á SBUF automatiškai inicijuoja jo perdavimŕ per nuoseklř portŕ. Kada duomenys skaitomi iš SBUF, jie išimami iš imtuvo buferio.
Skaitiklio registrai. Registrř poros (TH0, TL0) ir (TH1, TL1) sudaro 16 bitř skaičiavimo registrus atitinkamai skaitiklis 0 ir skaitiklis 1.
Valdymo registrai. Specialiř funkcijř registrai IP, IE, TMOD, TCON, SCON ir PCON sudaro valdymo ir pertraukčiř, skaitiklio ir nuoseklaus porto bitus.
Mikroprocesoriaus
AT89C2051 komandř ciklai esant ![]() :
:
Sudëties komanos vykdymas – 1 µs;
Daugybos / dalybos komandř vykdymo laikas – 4 µs;
Laikiniř parametrř árenginys skirtas formuoti vidines sinchronines fazes, taktus ir ciklus. Mašininiř ciklř skaičius priklauso nuo komandos vykdymo laiko. Beveik visos komandos vykdomos per vienŕ arba du ciklus. Signalas BQ (kvarcinio rezonatoriaus signalas) yra pirminis sinchronizacijos signalas. Šis signalas gaunamas iš taktinio generatoriaus, prijungus já prie mikrovaldiklio 5 ir 4 išvadř (kvarcinis rezonatorius), arba LC – grandinëlës, arba kitř išoriniř signalř šaltiniř.
žemo lygio signalo trukmë – ne mažiau 20 ns;
aukšto lygio signalo trukmë – ne mažiau 20 ns;
Schemos elementus C2, C3, BQ parenkame iš žinyno, kuriř nominalai yra rekomenduojami šiam procesoriui: C2, C3 – 30 pF talpumo ± 10 pF. Parenkame KM – 4 tipo mažř gabaritř kondensatorius.
Áëjimo – išëjimo logika skirta signalo priëmimui ir išdavimui, garantuojančiŕ mikroprocesoriaus informacijos kaitŕ per P0 ir P3 portus.
Komandř registras skirtas kodo 8 skilčiř kodo vykdomř operacijř árašymui ir saugojimui, kuris dešifratoriumi keičiamas á 24 skilčiř kodŕ, kuris naudojamas programuojamai loginei matricai, kur sudaroma mikrooperacijř visuma, lygiagreti vykdomř komandř mikroprograma. Programř registras yra programiškai neprieinamas.
P 1.0 ir P1.1 gali bűti naudojami kaip vidinis analoginis komparatorius. P 3.4, P 3.3, P 3.2 mygtukř áëjimai. XTAL1, XTAL2 – kvarcinio rezonatoriaus áëjimas.
28 pav. Impulsř generatoriaus/dešifratoriaus principinë schema
Analoginis
skaitmeninis keitiklis MAX 154 29 pav. formuoja 8 bitř skaitmeniná
signalŕ, dël to švyturio spinduliojamos šviesos stiprimo vetć
galime suskirstyti á ![]() = 256 dalis. Siřsdami užklausimŕ á
švytorá kontroliojantá mikrovaldiklá atsakyme mes gauname
švyturio švytëjimo stiprumo vertć. Gautŕ vertć programa
lygina su nustatyta verte ir iš to galima matyti ar švyturiai švytëjimo
stiprumo vertë nenukrypsta nuo užduotosios vertës.
= 256 dalis. Siřsdami užklausimŕ á
švytorá kontroliojantá mikrovaldiklá atsakyme mes gauname
švyturio švytëjimo stiprumo vertć. Gautŕ vertć programa
lygina su nustatyta verte ir iš to galima matyti ar švyturiai švytëjimo
stiprumo vertë nenukrypsta nuo užduotosios vertës.
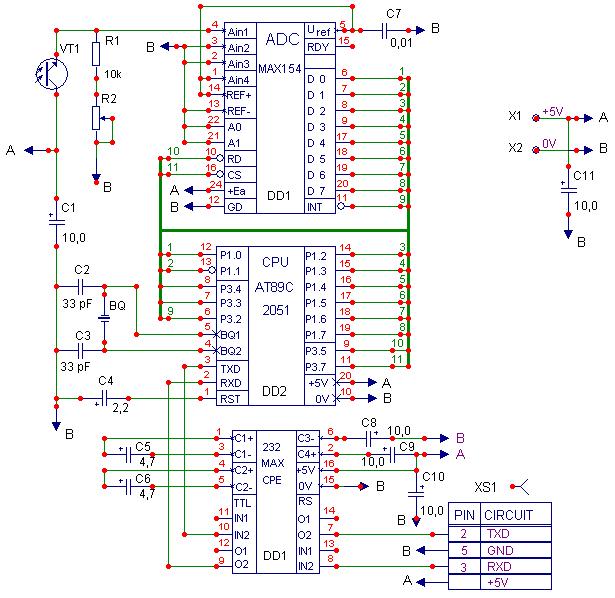
29 pav. Impulsř generatorius/dešifratorius kartu su fotodavikliu principinë schema
|
Pradžia | |||||
|
| |||||
|
Komanda yra? |
Ne |
||||
|
|
|||||
|
Taip | |||||
|
Komanda skirta šiam árenginiui? |
Ne |
||||
|
|
|||||
|
Taip | |||||
|
ASK paleidimas | |||||
|
Užlaikymas | |||||
|
ASK nuskaitymas | |||||
|
Duomenř išsiuntimas | |||||
30 pav. Mikroprocesoriaus AT89C2051 programos algoritmas.
2.1.4 Duomenř siuntimas jëgos grandinëmis
Siřstuvas yra padarytas iš KMOP mikroschemos K561LA7 kuri maitinama 15 V (atsižvelgiant á gamintojo rekomendacijŕ jai maitinimŕ átmampa paduoti geriau per 200-300 omř varžŕ, tuo sumažindami mikroschemos kaitimo galimybć) , iš jos padarytas generatorius kurio dažná nustato prijungtas kvarcinis rezonatorius (375 kHz ir 450 kHz). Generatorius yra komutuojamas trečiu loginiu elementu. Teigiamo poliarumo signalas atëjćs iš COM porto praleidžia generatoriaus impulsus á vidutinës galios tranzistoriř (gali bűti KT814 ). Šio tranzistoriaus kolektoriaus grandinëje yra kontűras kurio rezonanso dažnis lygus generatoriaus pirmŕjai harmonikai (375 kHz ir 450 kHz). Tranzistoriaus bazës grandinëje yra kintanti varža, kuriŕ keisdami pasiekiamas mažiausiai iškraipomas signalas generatoriaus išëjime. Nuo emiterio grandinëje esančios varžos priklauso kiek bus iškraipytas signalas. Kuo varža didesnë tuo geresná signalŕs gaunamas ( arba mažëja siřstuvo galingumas).
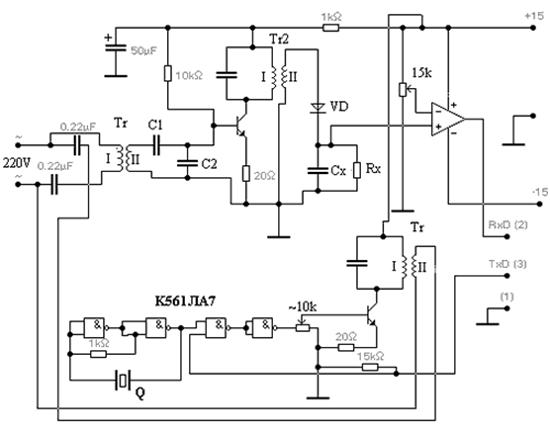
31 pav. Siřstuvo/imtuvo principinë schema.
Imtuvo áëjime stovi atsajos transformatorius - filtras, kad nepraleistř 220 V 50 Hz virpesio prie pirminio stiprintuvo. Transformatorius praleidžia didesni nei 100 kHz dažná, o bűtent tokius dažnius ir naudojame. Pirminiame stiprinimo laipsnyje naudojamas vieno tranzistoriaus stiprintuvas, selektyviŕ grandinć. Tranzistoriaus kolektoriuje yra kontűras kuris suderintas su priimamu signalu ( tarkim 450 kHz). Bazës grandinëje naudojamas dalinis kontűro jungimas, šis kontűras taip pat turi bűti suderintas 450 kHz dažniui (kito imtuvo kitoks dažnis). Labai svarbus ribinis dažnis Rx Cx grandinëlës, ji turi didelć átakŕ duomenř perdavimo greičiui. Šios grandinëlës laiko pastovioji parenkama didesnë nei 2 sinusinio signalo periodai pagal Naikvisto teoremŕ, esant nešančio signalo dažniui 375 kHz bus:
![]()
Taigi laiko pastovioji rx Cx skaičiuojama taip t = 1/(2*3.1415* f), t = 1/(Rx *Cx), čia f - dažnis. t turi bűti bent 1,2-1,5 karto didesnë nei pateikta formulëje. Tas pats galioja ir aukštesniam dažniui. Per oscilografŕ signalas ant Cx Rx išvadř atrodo taip:
32 pav. Cx; Rx signalas
Operacinis stiprintuvas be gážtamo ryšio veikia kaip komparatorius, lygina átampos reikšmć ant Rx Cx su slenkstine átampŕ, kuriŕ nustato potenciometras. Kai nëra signalo operacinio stiprintuvo išëjime turi bűti apie -15 V. Kai signalas yra, - tai átampa apie +15 V. Šioje schemoje labai svarbř vaidmená atlieka imtuvo jautrumas, jam padidinti galima naudoti dar vienŕ tranzistoriř áëjime.
2.2 Veikimo algoritmas
51 serijos mikrokovaldikliai turi du vidinius skaitiklius - laikmačius kuriais organizuojamos programos pertrauktys. Műsř schemoje tiksliř laikř reikalauja skystřjř imtuvo valdiklio valdymo protokolas, todël viena pertrauktis bus skirtas šiam protokolui ir darbui su ASK realizuoti ir vykdyti. Antra pertrauktis bus skirta kodř generatoriui valdyti. Pagrindinës programos algoritmas pavaizduotas 30 pav..
2.3 Programos tekstas
Programos tekstas, bei komentarai pateikti priede.
Programos tekstas surinktas naudojant redaktoriř Dos Navigator v5.02 Editor.
Programa sutransliuota naudojant asemblerá skirtŕ Intel’51 serijos mikrokontroleriams: 8051 Macro Asembler v4.02a ’85 by 2500 A.D. Software INC, 8051 Linker v4.02d ’85 by 2500 A.D. Software INC.
Programos derinimui naudotas simuliatorius skirtas Intel’51 serijos mikrokontroleriams: Avsim’51 8051 Simulator/Debugger by Avocet Systems INC ’86. Taip pat emuliatorius: 8031-51 Debugger and In Circuit emulator v1.6 by ForthINFO.
3. PUBLIKUOTAS MAGISTRO STRAIPSNIS
Oro uostř šviesř signalinës sistemos ir jř automatinës kontrolës analizë
M. Mogilnickij
VGTU AGAI
Anotacija
Šiuolaikiniř oro uostř KTT (kilimo tupimo takř) árangos svarbi dalis yra signaliniř žiburiř sistemos, kuriomis nurodomi lëktuvř kilimo ir tűpimo taškai. Šiame darbe trumpai apžvelgiamos signaliniř KTT žiburiř sistemos, nagrinëjamas tűptinës žiburiř árengimas bei maitinimo schemos, šviesos šaltiniai. Pateikiama automatinë aerodromř žiburiř veikimo kontrolës sistema ir trumpas jos aprašymas.
The signal systems of the airport lights and the analysis of their automatic control
SUMMARY
Signal lights systems, that are used to mark the taking-off and landing points on the airfield, are considered an important part of the taking-off and landing equipment of modern airports. This article briefly reviews the signal taking-off and landing lights systems, analyses the installation of landing lights and power schemes, as well as the sources of light. An automatic scheme of functioning control of airfield lights is enclosed together with its concise description.
Ávadas
Orlaivio artëjimas á tűpimo kursŕ, žemëjimas ir tűpimas yra gana sudëtinga procedűra, kurios saugumui užtikrinti viena iš sistemř yra oro uosto žiburiř sistemos. Orlaiviui tupiant, pilotas vadovaujasi radijo prietaisř parodymais, o po to pradeda vadovautis žiburiř teikiama informacija, kurios veikimas turi bűti patikimas.
Didëjant oro uostř aptarnaujamř orlaiviř skaičiui, norinr išlaikyti aukštŕ skrydžiř saugos lygá, aerodromuose tikslinga diegti signaliniř žiburiř automatizuotas kontrolës sistemas. Šiř sistemř paskirtis, - greitas ir efektyvus žiburiř bei maitinimo grandiniř gedimř nustatymas ir jř lokalizacija, siekiant užtikrinti aukštŕ orlaiviř kilimo tupimo oro uostuose saugos lygá.
Žiburiř kieká ir išdëstymo planŕ oro uostams reglamentuoja ICAO standartai [1].
Bet kuriuo atveju oro uosto ir jo prieigř signaliniř žiburiř grupës, jř išdëstymas, bei švietimo spalvos yra bendros visiems oro uostams, tačiau svarbiausiŕ jř dalá sudaro, taip vadinami, tűptinës žiburiai, nuo kuriř patikimumo žymia dalimi priklauso galutinë orlaivio tupimo oro uoste stadija 1 pav.
1 pav. Aerodromo žiburiř sistemos išdëstymo schema ir spinduliuojamos spalvos
1 – KTT tűpimo žiburiai (balta arba geltona spalva); 2 - Slenksčio(spind. žalia spalva) ir KTT galo žiburiai (spind. raudona spalva); 3 – artimasis radio švyturys; 4 – tolimasis radio švyturys; 5 – artëjimo žiburiai su impulsiniais šviesos šaltiniais(spind. balta spalva); 6 – artëjimo žiburiai (spind. balta spalva); 7 – šoninio horizonto žiburiai (spind. balta spalva); 8 – šoniniai riedëjimo tako žiburiai (spind. mëlyna spalva); 9 – tűptinës žiburiai (spind. balta ir raudona spalvas); 10 – KTT tűpimo zonos žiburiai (spind. balta spava); 11 – ašiniai KTT žiburiai (spind. balta ir raudona spalvas); 12 – riedëjimo takř ašiniai žiburiai (spind. žalia spalva);
1. Tűptinës žibűriř árengimas ir maitinimo schemos
Panagrinësime išsamiau labiausiai paplitusiř tűptinës žiburiř sistemř PAPI (Precision Approach Path Indicator) ir VASI (visual approach slope idicator) maitinimo bűdus [4].
PAPI sistemos žiburiai abejose KTT pusëse ájungti á atskirus maitinimo sistemos tinklus ir valdomi atskirais ryškio reguliatoriais. Patikimumui padidinti keturi vienos pusës tűptinës žiburiai maitinami iš atskiro tinklo. Kiekviena lempa maitinama iš savojo izoliuojančiojo transformatoriaus. 2 ir 3 paveikslëliuose pavaizduoti tűptinës žiburiř maitinimo schemos atitinkamai APAPI ir PAPI sistemoms.
2 ir 3 paveikslëlyje pavaizduoti elektros grandinës išrinkimo árenginys ryškio reguliatoriř sujungia su tos KTT pusës žiburiais, iš kurios artëja orlaivis. PAPI sistemoje yra du elektros grandinës išrinkimo árenginiai. Vienas iš jř prijungtas prie dešiniosios KTT pusës tuptinës žiburiř, kitas prie kairiosios. Ši maitinimo sistema nors ir brangi, tačiau patikima, nes vienam tűptinës žiburiř šoniniam horizontui neveikiant, kitas vis tiek veiks, nes šoniniai šviesos horizontai maitinami iš atskirř ryškio reguliatoriř.
2 pav. APAPI sistemos maitinimo schema.
4 paveikslëlyje pavaizduota tűptinës žiburio maitinimo su nebűtinu apšildymu sistema. Kiekviena lempa maitinama iš savojo izoliuojančio transformatoriaus (žr. 4 pav.). Izoliuojančiřjř transformatoriř galia 200 W. Abiejř žiburio lempř izoliuojantys transformatoriai sujungti á vienŕ sistemŕ, kaip ir gretimi žiburiai.
3BAR VASI sistemos maitinimo schema pavaizduota 5 paveikslëlyje. Kiekvieno tűptinës žiburio viduje árengti 3 prožektoriai, kuriuose yra 6,6A, 200W kaitinimo lempos. Kiekvienas prožektorius maitinamas iš savojo izoliuojančiojo transformatoriaus, o tűptinës žiburiai maitinami dviem ar trimis aukštos átampos kabelinëm linijom. Kiekviena kabelinë linija turi savŕjá ryškio reguliatoriř.
Žiburys montuojamas ant betoninio bloko, prieš árengiant reikia ištirti dirvŕ, išvalyti žemës paviršiř. Žiburiai turi bűti árengiami kuo arčiau žemës paviršiaus. Jei žemës paviršiaus nelygumai nežyműs, pakeitimai nereikalingi. Izoliuojantys (skiriamieji) transformatoriai árengiami žemëje arba duobëje patalpintame specialiame inde (4 pav. a ir b).
Tűptinës žiburiai laikosi ant metaliniř kojř, kuriř sujungimai yra labai trapűs ir neatsparűs dideliems mechaniniams krűviams.
3 pav. PAPI sistemos maitinimo schema.
4 pav. PAPI žiburio lempř maitinimas per izoliuojančius transformatorius.
5 pav. 3 BAR VASI sistemos žiburiř maitinimo schema.
6 pav. PAPI žiburio ir izoliuojančiřjř transformatoriř árengimas.
2. Aerodromo šviesos árenginiř automatizuota kontrolës sistema
Siűlomos automatizuotos signalinës žiburiř kontrolës sistemos struktűrinë – funkcinë schema pateikta 7 pav. Joje pavaizduoti pagrindiniai sistemos funkciniai blokai kuriř paskirtis sekanti;
Sinchronizacijos árenginys fiksuoja kintamos átampos 50 Hz pusperiodžius ir duomenis perduoda mikroprocesoriui;
Fotodaviklis fiksuoja žiburio veikimŕ, bei perduoda duomenis á mikroprocesoriř;
Mikroprocesorius apdoroja sinchronizacijos árenginio teikiamŕ informacijŕ, generuoja žiburio kodŕ, gedimo kodŕ, bei valdo komutacijos árenginá;
Filtro pagalba informacija iš mikroprocesoriau mikroprocesoriaus perduodama á galios grandinć;
Komutacijos árenginys prijungia ir atjungia žiburio sistemŕ prie galios grandinës;
PC tai personalinis kompiuteris kuris gauna ir apdoroja iš galios grandinës gautŕ informacijŕ.
7 pav. Automatinës aerodromř signaliniř žiburiř veikimo sistemos struktűrinë - funkcinë schema.
Pagrindiniai mano siűlomos sistemos funkciniai blogai pavaizduoti 7 pav. Sinchronizacijos árenginys skaičiuoja galios grandinës kintamos átampos (220V 50 Hz) perëjimus per nulá, t.y. pusperiodžius.
![]() (1)
(1)
Signaliniai žiburiai tikrinami po vienŕ kiekvieno pusperiodžio metu. Ćsant 50 Hz átampos dažniui per 1 sekundć patikrinama 100 žiburiř. Procesorius, atpažinćs savo pusperiodá, komutacijos áranginio pagalba per filtrŕ siunčia žiburio kodŕ. Ćsant tam tikriems nesklandumams žiburyje (perdegë kaitinimo siűlas ar pan.), ar galios grandinëje signalas nebus perduotas per 3 - 5 paveikslëliuose atavizduotus árenginius á personaliná kompiuterá ar kitŕ su šia sistema suderintŕ skaitmeniná átaisŕ. Negavus tam tikro signalo sistema akcentuoja gedimŕ parodydama jo vietŕ.
Išvados
Automatizuotos signaliniř žiburiř kontrolës sistemos:
Rekomenduojama árengti I, II, III klasës oro uostuose;
Tikslinga derinti (adaptuoti) su árengta oro uoste švituriř signaline sistema;
Gali tikrinti kiekvienŕ žiburá atskirai, arba tam tikras žiburiř grupes, nurodant atitinkamai gedimo pobűdá ir vietŕ.
Didina oro uostř signaliniř sistemř patikimumŕ.
Signaliniř žiburiř sistemř su automatizuota žiburiř kontrole eksploatacija:
Sudaro sŕlygas išvengti žmogiškos klaidos faktoriaus;
Reikalauja mažesniř eksploataciniř išlaidř;
Mažina darbuotojř apkrovimŕ;
Didina skrydžiř saugŕ oro uoste.
Literatűra:
В.В. Жуков, В.А. Воеводзинскии “Електрическое и ветовое оборудование аэродpoмов” Москва, Транспорт 1991 г.
IŠVADOS
Diplominiame projekte pateiktas techninis sprendimas kaip atlikti kontrolć apšvietimo lygio kiekvieno šviesos šaltinio (lempos) naudojamo aerodromř KTT (kilimo tűpimo tako) prieigř signaliniams žiburiams. Informacijos perdavimui apie apšvietimo lygá panaudoti lempř maitinimo kabeliai (jëgos linijos), t. y. panaudojama esama sistemos struktűra, kuri nereikalauja pavyzdžiui: papildomř radijo siřstuvř árangos, leidimo dažniams gavimo ir pan.
Informacijos buvimas apie kiekvienos lempos intensyvumŕ leidžia:
Leidžia laiku priimti sprendimŕ apie bűtinumŕ keisti lempŕ, t .y. nereikia periodiškai siřsti žmogaus vizualiai tikrinti lempas, o be to kas svarbiausia leidžia visŕ laikŕ turëti kokybiškŕ KKT tako apšvietimŕ, kas didinŕ skrydžiř saugŕ oro uoste.
2. Sudaro sŕlygas išvengti žmogiškos klaidos faktoriaus;
Reikalauja mažesniř eksploataciniř išlaidř;
Mažina darbuotojř apkrovimŕ;
Leidžia reguliuoti apšvietimŕ priklausomai nuo meteorologiniř oro sŕlygř bei paros meto.
Papildžius projektŕ techniniais sprendimais, kurie numatytř technines priemones automatiniam apšvietimo reguliavimui pagal informacijŕ apie lempř šviesos intensyvumŕ, tai leistř sutaupyti apie 20 % naudojamos elektros energijos apšvietimui.
Projekto efektyvumas tuo didesnis, kuo kontroliuojama daugiau lempř.
LITERATŰRA
T
В.В. Жуков, В.А. Воеводзинскии “Електрическое и световое оборудование аэродpoмов” Москва, Транспорт 1991 г.
Nr.11 1998 г. 25-28 p.
Nr.12 1998 г. 26-27 p.
Nr.1 1999 г. 18-20 p.
Nr.2 1999 г. 26-27 p.
Informacijos šaltinis - internetas
www.Casa.gov.an/download/CAAPs/drome/89t_1.PDF (Commissioning of PAPI opproach slope indicator system).
www.airportsystems.honeywell.com
www.airport-technology.com
www.armstrnlighting.com
www.rlocman.ru
www.chipinfo.ru
chaokhun.kmitl.ac.th/~kswichit/easy1/easy.htm
rf.atnn.ru/pic/bi2051.html
www.ineltek.ru
cec-mc.ru
PRIEDAI
mov SCON,#11010000B ;9 bitů RS232
mov TMOD,#00100010B ;TC1-reýime 2, TC0-reý.2; OSC ->TL0; ->TH1
mov PCON,#10000000B ;SMOD=1
mov TH1,#100 ;F = 4,8 kBod/12MHz
mov TH0,#156 ;106=256-(100*18/12)=256-(100*F/12)
;156=256-(100*12/12)
mov IP,#01000B ;prioritetas - low
mov TCON,#01010101B ;on: TR1; INT`ai pagal frontÝ
mov R17,#10Q ;pirmas registrů bankas
mov R27,#20Q ;antras registrů bankas
mov R37,#30Q ;treßias registrů bankas
mov pBUFD,#BUFD ;
mov HOLD_,#'H' ;
mov TSTST,#98H ;
mov OFFALS,#4 ;
mov MSEK,#5 ;
mov M100S,#10 ;
mov fALS,#0C0H ;
setb LLPz
mov P1,#0FFH ;
mov P3,#5FH ;
mov sINTRV,#81 ;
mov sNIMP,#1 ;
mov TZUM,#10 ;
jn P3.4,START ; Ne
setb AUTO ;
nop
j P3.4,$-1 ; laukiam kol bus sign
sjmp START ;
.ORG 1C0H ;
START: mov IE,#10001010B ; Leidýiam pertraukimus: ES;ET1;EX1;ET0;EX0;
call INIT_L ;
call CLRIND ;
clr A ;
mov IE,#10001010B ;
setb VERS ;
sjmp MAIN ;
.ORG 1E0H ;
MAIN: call ERROR ;
call WRK_KL ;
call WRKIND ;
sjmp MAIN ;
.ORG 230H ;
.INCLUDE TIM.ASM
.INCLUDE BLKSCH
.ORG 400H ;
WRKIND: jbc f_OFF,1$ ;
jbc NEW,2$ ;duomenys? - Taip
jbc REDR,$+4 ;Asł atnaujint duomenis (kitas parametras)
ret ; łł
jbc CLEAN,22$ ;
mov pREDR,p_PAR ; ł
mov R0,#QASCI ; ł
call REDRAW ; ł
jnb ER_TIM,$+4 ; ł
ret ; ł
setb BLCK ; ł
ret ; ł
setb ER_OFF ; ł
ret ; ł
jbc POOR,11$ ;
mov OFFALS,#4 ;
jb HOLD,11$ ;
call PUMP ;perpumpuojam naujys duomenis
call LIGHT ;
call CLRIND ;
mov pREDR,p_PAR ;
mov R0,#QASCI ;
call REDRAW ;
jnb ER_TIM,$+4 ;
ret ; jei pp. REDRAW fiksuota klaida
inc R0 ;
mov A,MODE ; 0 0 0 0 HOLD AUTO MORE SMALL (MEAN NORM)
anl A,#0111B ; - -
add A,#1000B ; A - - -
mov @R0,A ; - -
inc R0 ;
mov pREDR,#-1 ; periodo mnemonika
call REDRAW ;
jnb ER_TIM,$+4 ;
ret ; jei pp. REDRAW fiksuota klaida
setb ALL ;
ret ;
.ORG 460H ;
REDRAW: mov DPH,#>T_MNEM ;2 matuojamo parametro mnemonikos lenteló
mov A,pREDR ;1 ir matuojamo parametro numeris
clr C ;1
rlC A ;1
add A,#<T_MNEM ;1
jnC $+4 ;
inc DPH ;
mov DPL,A ;1
clr A ;1
movc A,@A+DPTR ;2
mov @R0,A ;1
inc R0 ;1
inc DPTR ;2
clr A ;1
movc A,@A+DPTR ;2
mov @R0,A ;1
inc R0 ;1
mov A,pREDR ; matuojamo parametro numeris=
jb MINUS,1$ ; periodas? - Taip
cjne A,QN_IMP,2$ ; LPz? - Ne
clr C ;
rlC A ;
mov fPER,C ;
add A,#QBUF ; i÷matuotů parametrů buferis
mov R1,A ;
call EXTR ; konvertuojam
jnb ER_TIM,3$ ;
ret ;
jC 1$ ; impulsai ar pauzes? - Taip
text [----] ; kode nera tiek impulsu
ret ;
mov A,MODE
cjne A,#3,5$ ;
clr A ;
mov R1,#Q_HDL ;
xchd A,@R1 ;
cjne A,#5,$+3 ;
jC 5$ ;
mov A,#10H ;
mov B,#0 ;
call ADD_HD ;
mov A,Q_HDH ;
jb fPER,6$ ; jei netikrinam
cjne A,#11,$+3 ; patikrinam ar reik
jC 6$ ;
setb ER_TIM ;
ret ;
call WRBUF ;
ret ;
.ORG 4C0H ;
WRBUF: mov @R0,#'SP' ;
swap A ;1
anl A,#0FH ;1
jz 1$ ;As
setb SIMB ; ł
add A,#'0' ; ł
mov @R0,A ; ł
inc R0 ;<Ů
;
mov A,Q_HDH ;
anl A,#0FH ;
jb SIMB,22$ ;AAs
mov @R0,#'SP' ; ł
jz 2$ ;Asł
setb SIMB ; łł
add A,#'0' ;<łŮ
mov @R0,A ; ł
inc R0 ;<Ů
mov A,Q_HDL ;
swap A ;
anl A,#0FH ;
jbc SIMB,33$ ;AAs
mov @R0,#'SP' ; ł
jz 3$ ;Asł
add A,#'0' ;<łŮ
mov @R0,A ; ł
inc R0 ;<Ů
;
mov A,Q_HDL ;
anl A,#0FH ;
add A,#'0' ;
mov @R0,A ;
inc R0 ;
ret ;
.ORG 500H ;
.INCLUDE PUMP.ASM
.ORG 5B0H ;
INIT_L: mov R0,#6 ;
mov A,R0 ;
add A,#(TBINIT-1$-1); 42H Darbo reýimo nustatymas 42
movc A,@A+PC ; 30H Sinchr./asinchroninis perra÷ymas 30/31
nop ; 14H Dekoderio őjungimas/i÷jungimas 15/14
jb ONE,1$ ;
mov Q_KOM,A ; 00H Mirksójimo atminties i÷valymas 00
setb ONE ; jungimas 11/10
djnz R0,2$ ;
ret ;
TBINIT: .db 11H,00H,20H,14H,30H,42H
.ORG 5D0H ;
CLRIND: mov R0,#QASCI ;1
mov R1,#15 ;1
mov @R0,#'SP' ;1<s
inc R0 ;1 ł
djnz R1,1$ ;2AŮ
ret ;2 64
.ORG 5E0H ;
WT: nop ;1<s
nop ;1 ł 4mks
djnz R3,$-2 ;2AŮ
djnz R4,$-4 ; (4*256+2)*256 = 262656 mks = ~0,25 sek
ret ;
.ORG 5F0H ;
movc A,@A+DPTR ;2 ł
mov @R0,A ;1 ł
inc R0 ;1 ł
inc DPTR ;1 ł
jnz TXT_X ;2AŮ
ret ;2
mov @R0,A ;<s
inc R0 ; ł
movc A,@A+DPTR ; ł
inc DPTR ; ł
jnz TXT-2 ;AŮ
jmp @A+DPTR ;
.ORG 600H ;
mov A,@R1 ;1
call H_D ;2
dec R1 ;1
mov A,@R1 ;1
jnz $+3 ;2
ret ;
cjne A,#0CH,$+3 ;2
jC $+5 ;2
setb ER_TIM ;
ret ;
rl A ;1
mov B,A ;1
add A,#(T_HDH-1$) ;1
movc A,@A+PC ;2
xch A,B ;1
inc A ;1
add A,#(T_HDH-2$) ;1
movc A,@A+PC ;2
call ADD_HD ;2+9
ret ;2=54
.RADIX H
.RADIX
mov B,#100 ;2
div AB ;4
mov Q_HDH,A ;1
;
mov A,B ;1
mov B,#10 ;2
div AB ;4
swap A ;1
orl A,B ;1
mov Q_HDL,A ;1
ret ;2/19
;
;
ADD_HD: add A,Q_HDL ;1
da A ;1
mov Q_HDL,A ;1
mov A,Q_HDH ;1
addc A,B ;1
da A ;1
mov Q_HDH,A ;1
ret ;2
.ORG 670H
.INCLUDE KLV.ASM
.ORG 6D0H
LIGHT: mov A,QN_IMP ; impulsů skaißius
clr fRED ;
clr C ;
rrC A ;
jC 1$ ;As
setb ER_IMP ; ł<snegalimas variantas: impulsů su pauzómis
clr RED ; ł ł skaißius nelyginis arba
clr GREEN ; ł ł impulsů per daug
ret ; ł ł
jnz 2$ ;<Ůsł
setb fRED ; łł
setb RED ; łł
clr GREEN ; łł
ret ; łł
dec A ;<AŮł
jnz 3$ ;As ł
setb RED ; ł łgeltona
setb GREEN ; ł ł
ret ; ł ł
dec A ;<Ů ł
jnz 11$ ;Ał
clr RED ;
setb GREEN ;
ret ; 0123456789ABCDEF
.ORG 700H ;
xch A,ERRFL ;
jnz $+3 ;
ret ;
jb HOLD,$-1 ;
setb CLEAN ;
mov B,#0FFH ; B=FF
inc B ;<s B=0,1,2,3,4,5,6,7
rrc A ; ł
jnC $-3 ;AŮ
mov A,#10H ;
mul AB ;
text_X T_ER ;
setb POOR
setb POOR ;
jb FIKS_A,2$ ;
clr END_Z ;
clr P1.1 ;
setb ER_AKK ;
setb FIKS_A ;
mov MODE,#0 ;
mov NTAKT,#8 ;
mov TH1,#100 ;
cpl DIV_F ;
mov TZUM,NTAKT ;
setb MELODI ;
ret ;
jbc END_Z,$+4 ;
ret ;
djnz NTAKT,1$ ;
mov IE,#0 ;
mov PCON,#2 ;
nop ;
nop ;
nop ;
jmp BEGIN ;
end
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3369
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved