| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
DOCUMENTE SIMILARE |
|
VILNIAUS GEDIMINO TECHNIKOS UNIVERSITETAS
ELEKTRONIKOS FAKULTETAS
AUTOMATIKOS KATEDRA

ŠIUOLAIKINË VALDYMO TEORIJA
Kursinis darbas
Duota atviros sistemos perdavimo funkcija:
![]()
Sprendimas:
Iš perdavimo funkcijos randame polius ir nulius:
Atviros
sistemos poliai: ![]()
![]()
Atviros
sistemos nuliai: ![]()
![]()
Šaknř hodografo asimptotës. Prie dideliř koeficiento „k“ reikšmiř šaknř hodografo asimptotës yra tiesiškos, kuriř kampai:
![]()
![]()
![]()
![]()
![]()
Čia ![]()
Asimptočiř sankirta (vieta ![]() ,
kur asimptotës kerta realiąją ašá):
,
kur asimptotës kerta realiąją ašá):
![]()
![]()
Bűdingosios lygties sudarymas
![]()
![]()
![]()
![]() arba
arba ![]()
Nutolimo taškai – tai taškai, kuriuose hodografas pradeda tolti nuo realiosios ašies.
![]()
![]()
![]()
Sutvarkius lygtá, gauname:
![]()
Surandame lygties šaknis:
![]()
![]() arba
arba ![]()
Ribinis stabilumas
(menamosios dalies kirtimas). ![]()
![]()
![]()
Sutvarkius reiškiná gauname:
![]()
Menamoji dalis:
![]()
![]()
![]()
Realioji dalis:
![]()
![]()
![]()
![]()
Ribinis kampas apskaičiuojamas pagal duotą
![]()
![]()
![]()
Hodografą braižome pasinaudoję MATLAB 7.6 programiniu paketu.
Programos kodas:
clf
k1=1
num=[k1*[1 1]];
den=conv([1 2],[1 1 1]);
rlocus(num,den);
zeta=0.52;
wn=2:2:8;
sgrid(zeta,wn);
[k,poles]=rlocfind(num,den)
num=[k*[1 1]];
[numcl,dencl]=cloop(num,den)
step(numcl,dencl)
grid
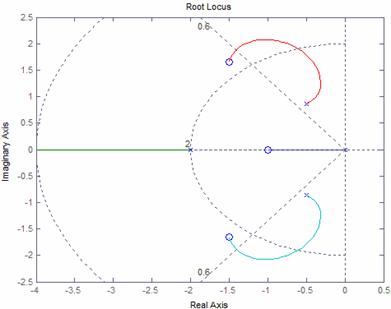
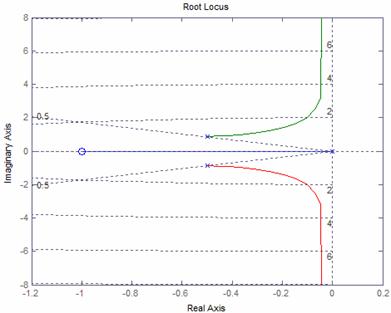
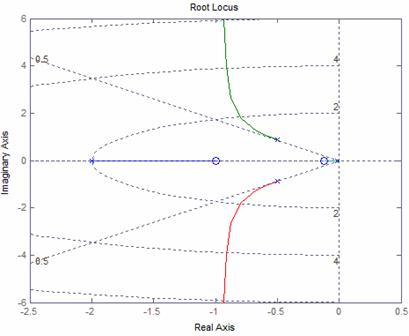
Gautas atviros perdavimo funkcijos hodografas atvaizduotas 1 pav.
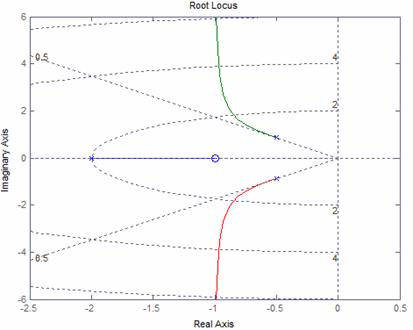
1 pav. Atviros perdavimo funkcijos hodografas
Tikslumo
koeficientą parinkus ![]() ,
hodografą kertą K taške. Stiprinimo koeficientas
,
hodografą kertą K taške. Stiprinimo koeficientas ![]() Perskaičiavus šaknis pasinaudojus MATLAB 7.6
programiniu paketu, esant koeficientui
Perskaičiavus šaknis pasinaudojus MATLAB 7.6
programiniu paketu, esant koeficientui ![]() ,
gaunamos tokios šaknys:
,
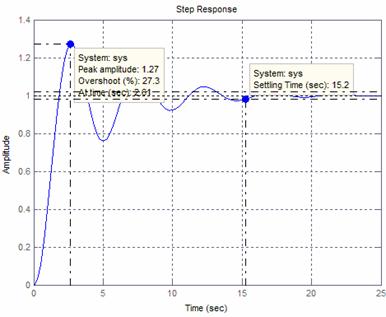
gaunamos tokios šaknys: ![]() Pereinamasis procesas nusistovi, kai
Pereinamasis procesas nusistovi, kai ![]() s.
(2 pav.). Maksimalus nuokrypis (Overshoot) 27,3 %, kai amplitudës
didžiausia reikšmë (Peak amplitude) 0,225 amplitudës.
s.
(2 pav.). Maksimalus nuokrypis (Overshoot) 27,3 %, kai amplitudës
didžiausia reikšmë (Peak amplitude) 0,225 amplitudës.
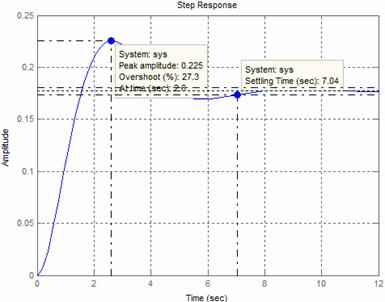
2 pav. Atvirosios perdavimo funkcijos pereinamasis
procesas, kai stiprinimo koeficientas ![]()
Jei stiprinimo koeficientas
yra lygus vienam ![]() ,
gausime atviros sistemos bűdingąją lygtá:
,
gausime atviros sistemos bűdingąją lygtá:
![]()
PD koregavimo grandies lygtis:
![]()
Čia a – hodografo nuliai ant realios x ašies. Nustatome taškus:
a)
tarp
poliř ![]() ,
t.y.
,
t.y. ![]() ;
;
b)
![]() (nulis su poliu sutampa);
(nulis su poliu sutampa);
Pereinamojo proceso pagerinimui formuojamas hodografas taip, kad jis pasislinktř á kairę pusę ant menamosios ašies. Papildomo nulio pridëjimas á perdavimo funkciją sukuria šá efektą.
a) (nulis taške ![]() ):
šiuo atveju pertvarkyta sistemos perdavimo funkcija:
):
šiuo atveju pertvarkyta sistemos perdavimo funkcija:
![]()
Parinkus slopinimo koeficientą
lygu 0,5, gauname hodografą (3 pav.), kurio pereinamasis procesas pateiktas 4
pav. Pereinamasis procesas nusistovi, kai ![]() s.
Maksimalus nuokrypis (Overshoot) 29,4 %, kai amplitudës didžiausia
reikšmë (Peak amplitude) 0,431 amplitudës.
s.
Maksimalus nuokrypis (Overshoot) 29,4 %, kai amplitudës didžiausia
reikšmë (Peak amplitude) 0,431 amplitudës.
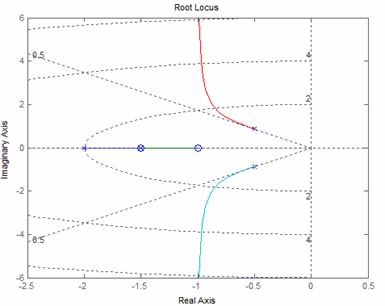
3 pav. Perdavimo funkcijos hodografas su PD koregavimo
grandimi, kai ![]()
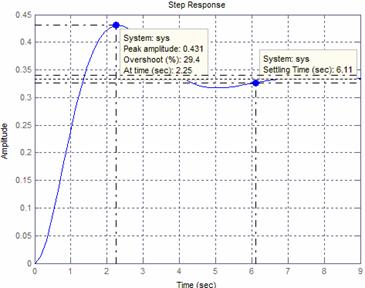
4 pav. Perdavimo funkcijos su PD koregavimo grandimi
pereinamasis procesas,
kai stiprinimo koeficientas ![]()
Perskaičiavus šaknis
pasinaudojus MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -0.6256 + 1.0932i,
-0.6256 - 1.0932i, -1.7489, -1.5000. Stiprinimo koeficiento taškas -0.6126 +
1.0994i.
gaunamos tokios šaknys: -0.6256 + 1.0932i,
-0.6256 - 1.0932i, -1.7489, -1.5000. Stiprinimo koeficiento taškas -0.6126 +
1.0994i.
b) Nulis taške ![]() .Šio
atveju pertvarkyta sistemos perdavimo funkcija:
.Šio
atveju pertvarkyta sistemos perdavimo funkcija:
![]()
Parinkus slopinimą 0,6 gauname hodografą (5 pav.), korio pereinamasis procesas pavaizduotas 6 pav.
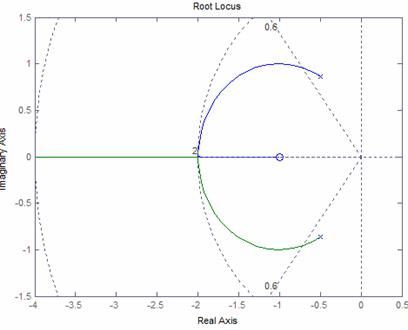
5 pav. Perdavimo funkcijos hodografas su PD koregavimo
grandimi, kai ![]()
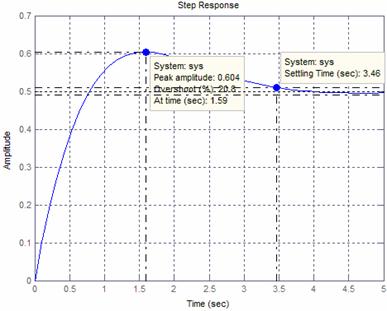
6 pav. Perdavimo funkcijos su PD koregavimo grandimi
pereinamasis procesas,
kai stiprinimo koeficientas ![]()
Perskaičiavus šaknis pasinaudojus MATLAB
7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -0.7319 + 0.9634i,
-0.7319 - 0.9634i. Stiprinimo koeficiento taškas: -0.7316 + 0.9643i. Pereinamasis
procesas nusistovi, kai
gaunamos tokios šaknys: -0.7319 + 0.9634i,
-0.7319 - 0.9634i. Stiprinimo koeficiento taškas: -0.7316 + 0.9643i. Pereinamasis
procesas nusistovi, kai ![]() s,
o sistemos maksimalus nuokrypis 20,8 %.
s,
o sistemos maksimalus nuokrypis 20,8 %.
Parinkus slopinimą 0,75 gauname hodografą
(7 pav.), jo pereinamasis procesas pavaizduotas 8 pav. ir jis nusistovi, kai![]() s,
perdavimo funkcijos su PD koregavimo grandimi maksimalus nuokrypis 20,8 %.
s,
perdavimo funkcijos su PD koregavimo grandimi maksimalus nuokrypis 20,8 %.
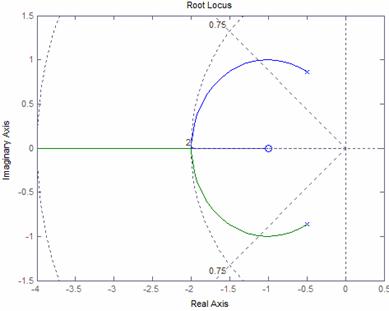
7 pav. Perdavimo funkcijos hodografas su PD koregavimo
grandimi, kai ![]()
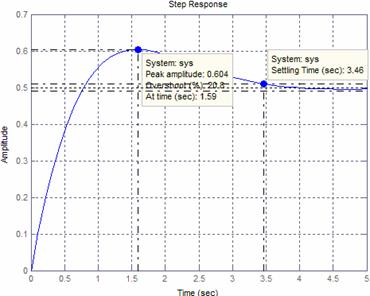
8 pav. Perdavimo funkcijos su PD koregavimo grandimi
pereinamasis procesas,
kai stiprinimo koeficientas ![]()
Perskaičiavus šaknis
pasinaudojus MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -1.1262 + 0.9920i,
-1.1262 - 0.9920i. Stiprinimo koeficiento taškas -1.1262 + 0.9922i.
gaunamos tokios šaknys: -1.1262 + 0.9920i,
-1.1262 - 0.9920i. Stiprinimo koeficiento taškas -1.1262 + 0.9922i.
Atvejui a (kai atsiranda papildomas nulis), perdavimo funkcija su PD koregavimo grandimi švytuoja kaip ir atvirosios perdavimo funkcijos, bet pereinamojo proceso laikas yra trumpesnis ant 0,93 s, didžiausia nuokrypa – padidëjo ant 2,1 %.
Atvejui b (kai parinktas nulis sutampa su poliu), perdavimo funkcija su PD koregavimo grandimi švytuoja kaip ir atvirosios perdavimo funkcijos, tačiau pereinamojo proceso laikas yra 2 k. trumpesnis, didžiausia nuokrypa – mažesnë ant 6,5 %. Šiai grandinei (b atveju) slopinimo koeficientas átakos nedaro: grafikai ir pereinamojo proceso laikai, didžiausios nuokrypos reikšmës sutampa.
Palyginus a ir b atvejus, matome, kad b atvejis geresnis, nes jo pereinamojo proceso laikas 2,65 k. mažesnis ir didžiausia nuokrypa yra ant 8,6 % mažesnë.
Signalo, proporcingo paklaidos išvestinei, suformavimas stiprina triukšmus sistemoje. Triukšmř stiprinimas gali ásotinti elektroninius stiprintuvus ir sistema tiksliai neveiks. Todël grynř diferencijavimo grandžiř sistemose patariama vengti ir vietoj jř naudoti forsuojančius reguliatorius.
PID reguliatorius sudaromas iš PI ir PD reguliatoriř. PID koregavimo grandies lygtis:
![]()
Čia a ir b – hodografo nuliai. Taškř vietas nustatome:
a) ![]() ;
; ![]() ;
;
b) ![]()
![]() (nulis su poliu sutampa).
(nulis su poliu sutampa).
a) Šiuo atveju pertvarkyta sistemos perdavimo funkcija:
![]()
Parinkus slopinimo koeficientą 0,6, gauname hodografą (9 pav.), o jo pereinamasis procesas pavaizduotas 10 pav. Pereinamasis procesas nusistovi iki 8,3 s, perdavimo funkcijos su PID koregavimo grandimi maksimalus nuokrypis pasiekiamas iki 23,6 %.
9 pav. Perdavimo funkcijos hodografas su PID koregavimo
grandimi, kai ![]()
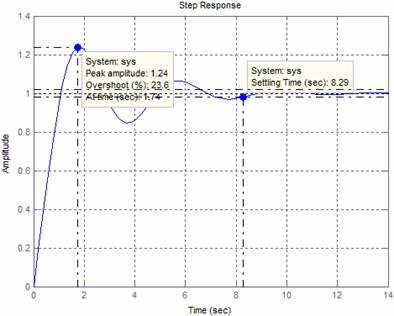
10 pav. Perdavimo funkcijos su PID koregavimo grandimi
pereinamasis procesas,
kai stiprinimo koeficientas ![]()
Perskaičiavus šaknis
pasinaudojus MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -10.2830, -1.4119 +
1.8851i, -1.4119 - 1.8851, -0.9711. Stiprinimo koeficiento taškas
-1.4141+1.8866i.
gaunamos tokios šaknys: -10.2830, -1.4119 +
1.8851i, -1.4119 - 1.8851, -0.9711. Stiprinimo koeficiento taškas
-1.4141+1.8866i.
b) Šio atvejo pertvarkyta sistemos perdavimo funkcija:
![]()
Parinkus slopinimo koeficientą 0,6 gauname hodografą (11 pav.), o jo perinamojo proceso charakteristika pateikta 12 pav. Pereinamasis procesas nusistovi per 24,7 sekundes, perdavimo funkcijos su PID koregavimo grandimi maksimalus nuokrypis pasiekiamas 0 %.
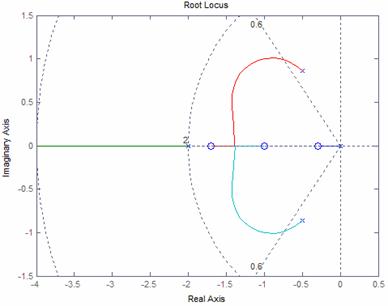
11 pav. Perdavimo funkcijos hodografas su PID koregavimo
grandimi, kai ![]()
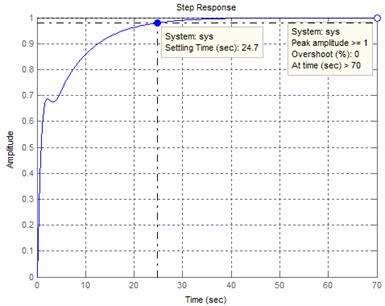
12 pav. Perdavimo funkcijos su PID koregavimo grandimi pereinamasis
procesas, kai stiprinimo koeficientas ![]()
Perskaičiavus šaknis
pasinaudojus MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -2.0711, -0.7530 +
0.9919i, -0.7530 - 0.9919i, -0.1064. Stiprinimo koeficiento taškas: -0.7530 +
0.9922i.
gaunamos tokios šaknys: -2.0711, -0.7530 +
0.9919i, -0.7530 - 0.9919i, -0.1064. Stiprinimo koeficiento taškas: -0.7530 +
0.9922i.
Perdavimo funkcijos su PID koregavimo grandimi (a atvejis), palyginus su atviros perdavimo funkciją: pereinamojo proceso laikas pailgëja ant 1,25 s, nes PID koregavimo grandis suteikia švytavimus, o didžiausia nuokrypa sumažëjo ant 3,7%.
Perdavimo funkcijos su PID koregavimo grandimi (b atvejis), palyginus su atviros perdavimo funkciją: pereinamojo proceso laikas pailgëja 3,5 k, nes PID koregavimo grandis suteikia švytavimus, o didžiausia nuokrypa sumažëjo ant 27,3%.
Palyginus a ir b atvejus, matome, kad b atvejis geresnis, nes jo didžiausia nuokrypa lygi 0 %, tačiau pereinamojo proceso laikas padidëjo beveik 3 k.
Jei uždarosios sistemos pereinamojo proceso kokybë yra pakankama, bet nusistovëjusio režimo paklaida perdidelë, ją galima sužinti, didinant sistemos eilę. Šis eilës padidëjimas neturi pakeisti dominuojančiř bűdingosios lygties šaknř. Sistemos eilë gali bűti padidinta, ájungiant PI reguliatoriř, kuris suformuoja poveikio signalą proporcingą paklaidai ir jos integralui. PI koregavimo grandies lygtis:
![]()
Čia a – hodografo nuliai. Nustatome taškř vietas:
a) ![]()
b) ![]()
a) Šiuo atveju pertvarkyta sistemos perdavimo funkcija:
![]()
Parinkus slopinimo koeficientą 0,5, gauname hodografą (13 pav.), kurio perinamojo proceso charakteristika pateikta 14 pav. Pereinamasis procesas nusistovi per 15,2 sekundes, o perdavimo funkcijos su PI koregavimo grandimi maksimali dinaminë nuokrypa pasiekiama 27,3 %.
Perskaičiavus šaknis
pasinaudojus MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -0.4530 + 0.8970i,
-0.4530 - 0.8970i, -0.0940. Stiprinimo koeficiento taškas: -0.4983 + 0.9193i.
gaunamos tokios šaknys: -0.4530 + 0.8970i,
-0.4530 - 0.8970i, -0.0940. Stiprinimo koeficiento taškas: -0.4983 + 0.9193i.
13 pav. Perdavimo funkcijos hodografas su PI koregavimo
grandimi, kai ![]()
14 pav. Perdavimo funkcijos su PI koregavimo grandimi
pereinamasis procesas,
kai stiprinimo koeficientas ![]()
b) Šiuo atveju pertvarkyta sistemos perdavimo funkcija:
![]()
Parinkus slopinimo koeficientą 0,75, gauname hodografą (15 pav.). Perinamojo proceso charakteristika pateikta 16 pav. Pereinamasis procesas nusistovi per 9,4 sekundes, o perdavimo funkcijos su PI koregavimo grandimi maksimali dinaminë nuokrypa pasiekiama 0 %.
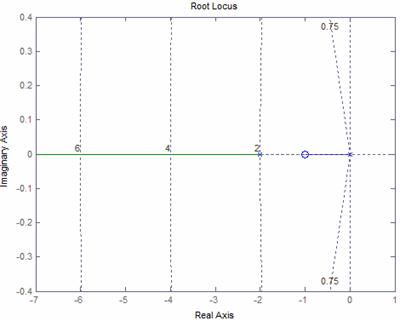
15 pav. Perdavimo funkcijos hodografas su PI koregavimo
grandimi, kai ![]()
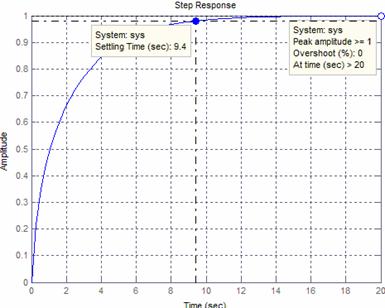
16 pav. Perdavimo funkcijos su PI koregavimo grandimi
pereinamasis procesas,
kai stiprinimo koeficientas ![]()
Perskaičiavus šaknis pasinaudojus
MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -2.0049, -0.0049.
Stiprinimo koeficiento taškas: 0.0047 - 0.0012i.
gaunamos tokios šaknys: -2.0049, -0.0049.
Stiprinimo koeficiento taškas: 0.0047 - 0.0012i.
Perdavimo funkcijos su PI koregavimo grandimi (a atvejis), palyginus su atviros perdavimo funkciją: pereinamojo proceso laikas 2 k. ilgesnis, o didžiausia nuokrypa - nepakitusi.
Perdavimo funkcijos su PI koregavimo grandimi (b atvejis), palyginus su atviros perdavimo funkciją: pereinamojo proceso laikas pailgëja ant 2,36 s, o maksimali dinaminë nuokrypa sumažëjo ant 27,3 %.
Palyginus a ir b atvejus, matome, kad b atvejis geresnis, nes jo pereinamojo proceso laikas trumpesnis ant 5,8 s, o didžiausia nuokrypa ant 27,3%.
Delsiantis (integruojantis) reguliatorius padidina sistemos stiprinimo koeficientą ir mažai sumažina sistemos nuosavřjř virpesiř dažná. Delsiančio reguliatoriaus lygtis:
Čia ![]()
![]() - poliř ir nuliř santykis. Paimame
- poliř ir nuliř santykis. Paimame ![]() ,
o stiprintuvo
,
o stiprintuvo ![]() .
.
a) ![]()
b) ![]()
a) Šiuo atveju, kai ![]() pertvarkyta sistemos perdavimo funkcija:
pertvarkyta sistemos perdavimo funkcija:
![]()
Parinkus slopinimo koeficientą 0,5, tuomet gauname hodografą (17 pav.). Iš pereinamojo proceso charakteristikos (18 pav.) matome, kad ši koregavimo grandis neduoda nuokrypio. Sistema nusistovi per 52,5 s.
Perskaičiavus šaknis
pasinaudojus MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -1.9915, -0.5005+
0.8758i, -0.5005 - 0.8758i, -0.0575. Stiprinimo koeficiento taškas: -0.4988 +
0.8758i.
gaunamos tokios šaknys: -1.9915, -0.5005+
0.8758i, -0.5005 - 0.8758i, -0.0575. Stiprinimo koeficiento taškas: -0.4988 +
0.8758i.
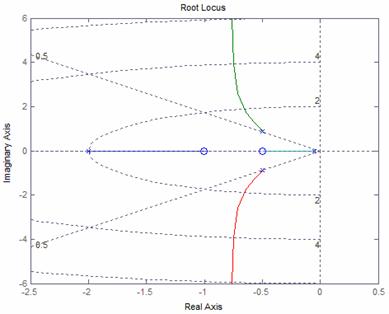
17 pav. Perdavimo funkcijos hodografas su delsenčio
reguliatoriaus koregavimo grandimi, kai ![]()
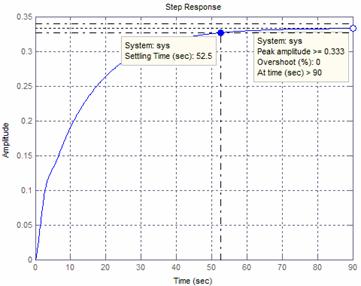
18 pav. Perdavimo funkcijos su delsenčio reguliatoriaus koregavimo grandimi
pereinamasis procesas,
kai stiprinimo koeficientas ![]()
b) Šiuo atveju, kai ![]() pertvarkyta sistemos perdavimo funkcija:
pertvarkyta sistemos perdavimo funkcija:
![]()
Parinkus slopinimo koeficientą 0,6 gauname hodografą (19 pav.). Pereinamojo proceso charakteristika pavaizduota 20 pav. Šiuo atveju perreguliavimo taip pat nëra. Sistema nusistovëjo lëčiau už a dalies pereinamąjá procesą (nusistovi po 105 s.).
Perskaičiavus
šaknis pasinaudojus MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -1.9905, -0.5029
+0.8754i, -0.5029- 0.8754i, -0.0286. Stiprinimo koeficiento taškas: -0.4988 +
0.8758i.
gaunamos tokios šaknys: -1.9905, -0.5029
+0.8754i, -0.5029- 0.8754i, -0.0286. Stiprinimo koeficiento taškas: -0.4988 +
0.8758i.
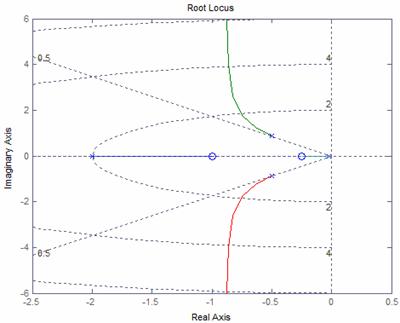
19 pav. Perdavimo funkcijos hodografas su delsenčio
reguliatoriaus koregavimo grandimi, kai ![]()
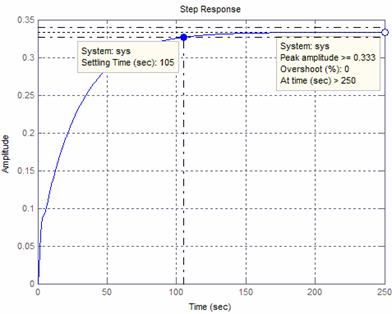
20 pav. Perdavimo funkcijos su delsenčio reguliatoriaus koregavimo grandimi
pereinamasis procesas,
kai stiprinimo koeficientas ![]()
Perdavimo funkcijos su delsiančio reguliatoriaus koregavimo grandimi (a atvejis), palyginus su atviros perdavimo funkciją: pereinamojo proceso laikas yra beveik 7 k. ilgesnis, o didžiausia nuokrypa mažesnë ant 27,3%.
Perdavimo funkcijos su delsiančio reguliatoriaus koregavimo grandimi (b atvejis), palyginus su atviros perdavimo funkciją: pereinamojo proceso laikas pailgëja beveik 15 k., tačiau didžiausia nuokrypa sumažëjo ant 27,3%.
Palyginus a ir b atvejus, matome, kad a atvejis geresnis, nes jo pereinamojo proceso laikas trumpesnis 2 k., o maksimali dinaminë nuokrypa – tokia pati (0 %).
Forsuojantis (diferencijuojantis) reguliatorius mažai padidina sistemos stiprinimo koeficientą ir ženkliai padidina nuosavřjř virpesiř dažná. Forsuojančio reguliatoriaus lygtis:
Čia ![]()
![]() - poliř ir nuliř santykis. Paimame
- poliř ir nuliř santykis. Paimame ![]() ,
o stiprintuvo
,
o stiprintuvo ![]() .
.
Jeigu reguliatoriaus nulis ![]() panaikina didžiausią
reikšmę turintá realřjá sistemos perdavimo funkcijos poliř
(išimtis – polius, lygus nuliui), gaunamas žymus pereinamojo proceso
pagerinimas.
panaikina didžiausią
reikšmę turintá realřjá sistemos perdavimo funkcijos poliř
(išimtis – polius, lygus nuliui), gaunamas žymus pereinamojo proceso
pagerinimas.
a) ![]()
b) ![]()
a) Šiuo atveju pertvarkyta sistemos perdavimo funkcija:
![]()
Parinkus slopinimo koeficientą 0,5, gauname hodografą (21 pav.), kurio pereinamojo proceso charakteristika pavaizduota 22 pav. Pereinamasis procesas nusistovi po 67,4 s, ši perdavimo funkcija su forsuojančiu reguliatoriumi maksimalios dinaminës nuokrypos neduoda.
21 pav. Perdavimo funkcijos hodografas su forsuojančio
reguliatoriaus koregavimo grandimi, kai ![]()
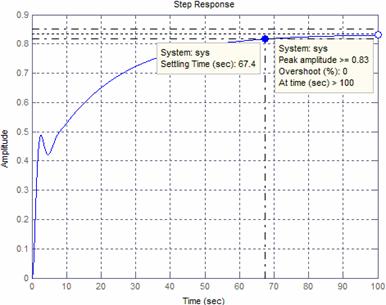
22 pav. Perdavimo
funkcijos su forsuojančio reguliatoriaus koregavimo grandimi pereinamasis
procesas, kai stiprinimo koeficientas ![]()
Perskaičiavus šaknis
pasinaudojus MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -1.9009, -0.5418 +
0.9581i, -0.5418 - 0.9581i, -0.0281. Stiprinimo koeficiento taškas: -0.5557 +
0.9503i.
gaunamos tokios šaknys: -1.9009, -0.5418 +
0.9581i, -0.5418 - 0.9581i, -0.0281. Stiprinimo koeficiento taškas: -0.5557 +
0.9503i.
b) Šiuo atveju pertvarkyta sistemos perdavimo funkcija:
![]()
Parinkus slopinimo koeficientą 0.5, gauname hodografą (23 pav.). Iš pereinamojo proceso charakteristikos (24 pav.) matome, kad procesas sutrumpëjo (buvo 67,4 s, o dabar 44 s).
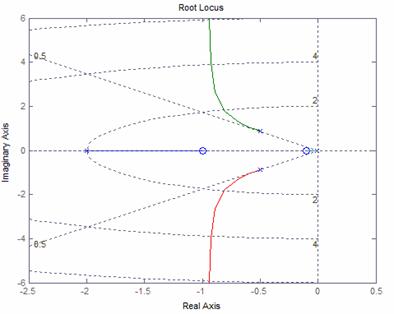
23 pav. Perdavimo funkcijos hodografas su forsuojančio
reguliatoriaus koregavimo grandimi, kai ![]()
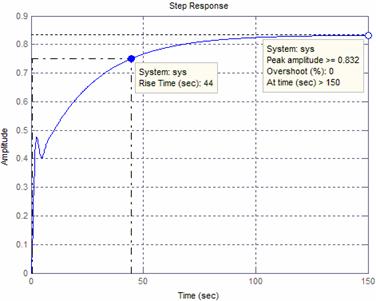
24 pav. Perdavimo funkcijos su forsuojančio reguliatoriaus koregavimo grandimi
pereinamasis procesas,
kai stiprinimo koeficientas ![]()
Perskaičiavus šaknis
pasinaudojus MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -1.8594, -0.5620 +
+0.9958i, -0.5620 - 0.9958i, -0.0266. Stiprinimo koeficiento taškas: -0.5770 +
0.9876i.
gaunamos tokios šaknys: -1.8594, -0.5620 +
+0.9958i, -0.5620 - 0.9958i, -0.0266. Stiprinimo koeficiento taškas: -0.5770 +
0.9876i.
Perdavimo funkcijos su forsuojančio reguliatoriaus koregavimo grandimi (a atvejis), palyginus su atviros perdavimo funkciją: pereinamojo proceso laikas yra beveik 9,6 k. ilgesnis, o maksimali dinaminë nuokrypa mažesnë ant 27,3%.
Perdavimo funkcijos su forsuojančio reguliatoriaus koregavimo grandimi (b atvejis), palyginus su atviros perdavimo funkciją: pereinamojo proceso laikas pailgëja beveik 6,25 k., tačiau maksimali dinaminë nuokrypa sumažëjo ant 27,3%.
Palyginus a ir b atvejus, matome, kad b atvejis geresnis, nes jo pereinamojo proceso laikas trumpesnis ant 23,4 s, o maksimali dinaminë nuokrypa – tokia pati (0 %).
Delsiantis (integruojantis) reguliatorius padidina sistemos stiprinimo koeficientą ir mažai sumažina sistemos nuosavřjř virpesiř dažná. Forsuojantis (diferencijuojantis) reguliatorius mažai padidina sistemos stiprinimo koeficientą ir ženkliai padidina nuosavřjř virpesiř dažná. Nuosekliai ájungus du reguliatorius, abiejř pranašumai pranašumai pasireiškia tuo pačiu metu, t.y. gaunamas didelis stiprinimo koeficiento padodëjimas. Delsenčio - Forsuojantis reguliatoriaus lygtis:
Čia ![]()
![]()
![]() - poliř ir nuliř santykis. Paimame
- poliř ir nuliř santykis. Paimame ![]() ,
o stiprintuvo
,
o stiprintuvo ![]() .
.
a) ![]() ;
; ![]() ;
;
b) ![]() ;
; ![]() ;
;
a) Šioje pakopoje pertvarkyta sistemos perdavimo funkcija:
![]()
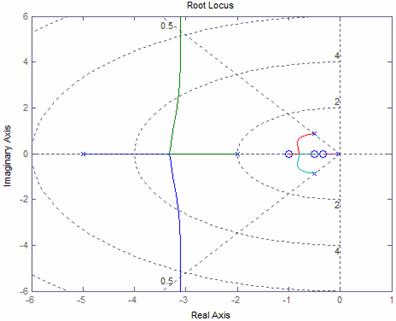
Sistemos perdavimo funkcijos lygties hodografas pavaizduotas 25 pav. Pereinamojo proceso charakteristika (26 pav.) rodo, jog perreguliavimo nëra. Sistema nusistovi per 211 s.
Perskaičiavus šaknis
pasinaudojus MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos
tokios šaknys: -2.3827, -2.0997, -0.5086 + 0.8633i, -0.5086- 0.8633i, -0.0129.
Stiprinimo koeficiento taškas: -0.4994 + 0.8571i.
gaunamos
tokios šaknys: -2.3827, -2.0997, -0.5086 + 0.8633i, -0.5086- 0.8633i, -0.0129.
Stiprinimo koeficiento taškas: -0.4994 + 0.8571i.
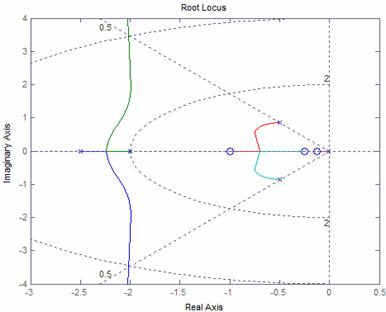
25 pav. Perdavimo funkcijos hodografas su delsenčio
forsuojančio reguliatoriaus koregavimo grandimi, kai ![]()
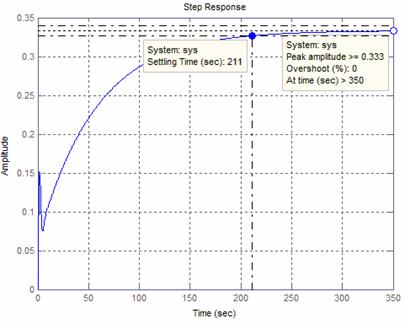
26 pav. Perdavimo
funkcijos su delsiančio forsuojančio reguliatoriaus koregavimo grandimi pereinamasis
procesas, kai stiprinimo koeficientas ![]()
b) Šiuo atveju pertvarkyta sistemos perdavimo funkcija:
![]()
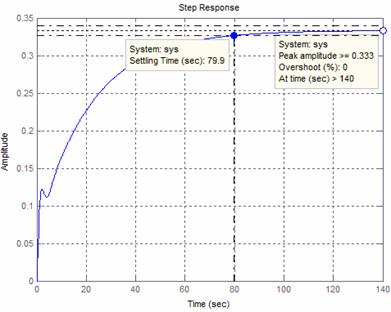
Sistemos perdavimo funkcijos
hodografas pavaizduotas 27 pav. Iš pereinamojo proceso charakteristikos matome:
perreguliavimo nëra (28 pav.). Pereinamojo proceso laikas – 79,9 s. Perskaičiavus
šaknis pasinaudojus MATLAB 7.6 programiniu paketu, esant koeficientui ![]() gaunamos tokios šaknys: -4.9533, -2.0249,
-0.5097+0.8656i, -0.5097- 0.8656i, -0.0354. Stiprinimo koeficiento taškas:
-0.5012 + 0.8758i.
gaunamos tokios šaknys: -4.9533, -2.0249,
-0.5097+0.8656i, -0.5097- 0.8656i, -0.0354. Stiprinimo koeficiento taškas:
-0.5012 + 0.8758i.
27 pav. Perdavimo funkcijos hodografas su delsenčio
forsuojančio reguliatoriaus koregavimo grandimi, kai ![]()
28 pav. Perdavimo
funkcijos su delsiančio forsuojančio reguliatoriaus koregavimo grandimi pereinamasis
procesas, kai stiprinimo koeficientas ![]()
Perdavimo funkcijos su forsuojančio reguliatoriaus koregavimo grandimi (a atvejis), palyginus su atviros perdavimo funkciją: pereinamojo proceso laikas yra beveik 30 k. ilgesnis, o didžiausia nuokrypa mažesnë ant 27,3%.
Perdavimo funkcijos su forsuojančio reguliatoriaus koregavimo grandimi (b atvejis), palyginus su atviros perdavimo funkciją: pereinamojo proceso laikas pailgëja beveik 11 k., tačiau maksimali dinaminë nuokrypa sumažëjo ant 27,3%.
Palyginus a ir b atvejus, matome, kad b atvejis geresnis, nes jo pereinamojo proceso laikas 2,6 k. trumpesnis, o maksimali dinaminë nuokrypa – tokia pati (0 %).
1 lentelë. Duomenř apibendrinimas
|
Koregavimo grandis |
Pereinamojo proceso laikas, s |
Slopinimo koeficientas, ζ |
Didžiausiais nuokrypis, % |
Stiprinimo koeficientas, K |
||||
|
a |
b |
a |
b |
a |
b |
a |
b |
|
|
PD | ||||||||
|
PID | ||||||||
|
PI | ||||||||
|
Delsianti | ||||||||
|
Forsuojanti | ||||||||
|
Delsianti-Forsuojanti | ||||||||
Išvados:
Literatűra:
„Advanced Control Engineering“ Roland S. Burns, UK, 2001.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1785
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved