| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
| Будівництво | Електронний | Медицина | Освіта | Фінанси | географія | економіка | законодавство |
| косметика | маркетинг | математика | політика | право | психологія | різний | соціологія |
| техніка | управління | фізичний | харчування | інформацію | історія |
DOCUMENTE SIMILARE |
|
ЕЛЕКТРОПРИВОДУ ПОСТІЙНОГО СТРУМУ МЕХАНІЗМУ ПЕРЕСУВАННЯ ВАНТАЖОПІДЙОМНОГО КРАНА.
принцип дії схеми керування та методи перевірки електромеханічних характеристик
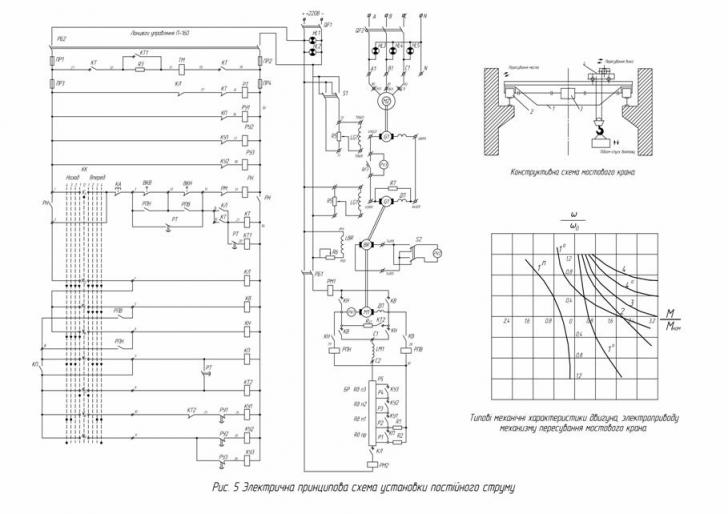
у якірне коло М1 уводяться додаткові резистори. У четвертому положенні рукоятки КК двигун працює на природній характеристиці. Як додаткові використовуються стандартні блоки дротових резисторів типу БК-12. Конкретна модифікація використовуваних блоків і розбивка їх на ступені визначаються потужністю двигуна й можливостями схеми керування [4].
Типові механічні характеристики електропривода механізму пересування з магнітним контролером П-160 наведені на рис. 6. Вони забезпечують плавне наростання моменту, який розвиває двигуном при пуску. Під час роботи двигуна на характеристиках Iп, Iа й 2 момент двигуна обмежений. Подальший розгін на характеристиках 3, 4а й 4 здійснюється при граничному моменті, рівному 220 - 250% Мном. Тим самим забезпечується мінімізація часу пуску.
При включенні автоматичного вимикача QF1 одержують живлення котушки електромагнітних реле часу РТ, РУ1, РУ2, РУ3 і реле спрацьовують. Замикаючі контакти реле гальмування РТ шунтують кінцеві вимикачі, що обмежують безпечну зону переміщення крана уперед ВКВ й назад ВКН, підготовляють коло включення котушок контакторів гальмування КТ1 і КТ2. Розмикальні контакти реле РУ1, РУ2, РУ3 у колах живлення котушок контакторів прискорення КУ1, КУ2 і КУ3 підготовляють контактори прискорення до включення в певній часовій послідовності.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
вимикачів ВКВ, ВКН і замкнутий контакт реле максимального струмового захисту РМ одержує живлення котушка реле нульового захисту РН. Реле РН спрацьовує і за допомогою свого замикаючого контакту, який шунтує контакт К1 командоконтролера, стає на саможивлення. Другий замикаючий контакт РН підготовляє коло включення котушок контакторів, приєднуючи їхню загальну точку до шини 220 В.
контакти К2 і К5, а також контакт К12. Одержує живлення котушка лінійного контактора КЛ і контактор спрацьовує. Своїм головним контактом він приєднує якірне коло двигуна до напруги мережі. Замикаючий контакт КЛ забезпечує живлення котушок контакторів гальмування КТ і КТ1. Контактори гальмування спрацьовують. При цьому КТ стає на саможивлення, і його головні контакти підключають до напруги мережі котушку механічного гальма ТМ, а головний контакт КТ1 шунтує опір R3, забезпечуючи тим самим форсування гальма при включенні. Вал двигуна розгальмовується. Одночасно з котушкою КЛ одержує живлення котушка контактора уперед КВ, і контактор спрацьовує. Своїми головними контактами КВ приєднує до напруги обмотку якоря М1. Оскільки контактор противмикання КП, контактори прискорення КУ1, КУ2, КУ3 і контактор гальмування КТ2 відключені, то й додатковий опір у якірному колі двигуна уведено повністю, і двигун буде розганятися по характеристиці 1п. Замикаючий контакт КВ забезпечує живлення котушки реле противмикання РПВ. Реле РПВ спрацьовує й своїм замикаючим контактом підготовляє коло живлення котушки КП. Розмикальний контакт КЛ розриває коло живлення котушки реле РТ й, після відліку заданої витримки часу, контакт РТ у колі живлення котушки КТ1 розмикається й КТ1 відключається. Послідовно з котушкою ТМ уводиться додатковий опір R3, що забезпечує тривале включення котушки за умовами нагрівання.
При переводі рукоятки КК у друге положення замикається контакт К7 й одержує живлення котушка КП. Контактор противмикання КП спрацьовує й своїм головним контактом шунтує ступінь противмикання Rд.пр. Двигун М1 переходить на характеристику 2. Розмикальний контакт КП розриває коло живлення котушки РУ1 і реле починає відлік витримки часу. По її закінченні РУ1 замикає свій контакт у колі живлення котушки КУ1. Включений у це ж коло контакт КТ2 перебуває в замкнутому стані, тому що реле РТ відключене й котушка КТ2 у другому положенні рукоятки живлення не одержує.
При переводі рукоятки КК у третє положення замикається контакт К8 й одержує живлення котушка КУ1. Контактор прискорення спрацьовує й своїм головним контактом шунтує перший ступінь пускового реостата Rдп1. Двигун М1 переходить на характеристику 3. Розмикальний контакт КУ1 розриває коло живлення котушки РУ2 і реле починає відлік витримки часу. По її закінченні РУ2 замикає свій контакт у колі живлення котушки КУ2.
При переводі рукоятки КК у четверте положення замикається контакт К9 й одержує живлення котушка КУ2. Контактор прискорення спрацьовує й своїм головним контактом шунтує другий ступіньпускового реостата Rдп2. Двигун М1 переходить на характеристику 4а. Розмикальний контакт КУ2 розриває коло живлення котушки РУ3 і реле починає відлік витримки часу. По її закінченні РУ3 замикає свій контакт у колі живлення котушки КУ3. Контактор прискорення спрацьовує й своїм головним контактом шунтує третій ступінь пускового реостата Rдп3. Двигун М1 переходить на характеристику 4 і швидкість обертання якоря зростає до сталого значення.
переведено з нульового положення в четверте положення уперед. Замикаються контакти К2, К5, К7, К8 і К9 командоконтролера. Черговість спрацьовування КЛ і КВ і здійснювані їх головними й блокувальними контактами перемикання аналогічні розглянутим вище. Однак, відразу ж після замикання контакту РПВ одержує живлення котушка КП, контактор противмикання спрацьовує й шунтує Rд.пр.. Таким чином, час роботи М1 на характеристиці 1п визначається сумою часів спрацьовування РПВ і КП і тому невеликий. Двигун М1 не встигає за цей час досягти значної швидкості, тому при спрацьовуванні КП і переході двигуна на характеристику 2 можливе істотне збільшення пускового моменту й прискорення двигуна, що буде викликати різке рушання крана з місця й небезпечне розгойдування вантажу. Для усунення цього одночасно з котушкою КП через замкнутий контакт РТ одержує живлення котушка КТ2. Контактор КТ2 своїм головним контактом підключає паралельно якорю М1 опір динамічного гальмування Rдт і двигун М1 перейде не на характеристику 2, а на 1а й буде розганятися по цій характеристиці протягом часу, рівного часу витримки РТ. По закінченні витримки часу контакт РТ, що живить котушку КТ2, розмикається, і двигун переходить на характеристику 2. Схема працює аналогічно, якщо при ручному пуску рукоятку КК із нульового перевести відразу в друге положення.
Розмикаючий контакт КП розриває коло живлення котушки РУ1, і реле прискорення починає відлік витримки часу. По його закінченні замикається контакт РУ1 у колі живлення котушки КУ1. Тому що витримка часу реле РТ менша витримки часу реле РУ1, до моменту замикання контакту РУ1 блок-контакт КТ2 у колі живлення котушки КУ1 уже замкнутий. Тому КУ1 спрацьовує і своїм головним контактом шунтує Rдп1. Двигун М1 переходить на характеристику 3.
Розмикальний контакт КУ1 розриває коло живлення котушки РУ2, і реле прискорення починає відлік витримки часу. По його закінченні замикається контакт РУ2 у колі живлення котушки КУ2, контактор спрацьовує й своїм головним контактом шунтує Rдп2. Двигун М1 переходить на характеристику 4а.
Розмикальний контакт КУ2 розриває коло живлення котушки КУ3, і реле прискорення починає відлік витримки часу. По його закінченні розривається контакт КУ3, контактор спрацьовує й своїм головним контактом шунтує Rдп3. Двигун М1 переходить на характеристику 4 і швидкість обертання якоря зростає до сталого значення.
спрацьовує й своїм головним контактом підключає паралельно якорю М1 опір Rдт. При цьому контактори КУ1, КУ2, КУ3 відключаються, а контактор КП залишається включеним, тому що його котушка стоїть на саможивленні. Двигун М1 переходить у режим динамічного гальмування на характеристику 1а, розташовану в другому квадранті. З характеристики 1а видно, що в момент перемикання М1 буде розвивати порівняно невеликий гальмовий момент. Тому швидкість пересування крана буде плавно зменшуватися. Однак гальмовий момент у цьому випадку діє тільки до певного значення швидкості.
Підвищення ефективності подальшого гальмування досягається за рахунок переводу М1 у режим гальмування противмиканням. Для цього рукоятку КК необхідно перевести в будь яке з положень у напрямку назад. Припустимо, у перше.
Контактори відключаються й у якірне коло М1 уводяться пускові опори й опір противмикання. Контактор КТ залишається у включеному стані, тому механічне гальмо не спрацьовує.
Керування процесом гальмування противмиканням у схемі виконується у функції ЭДС, і в цьому випадку здійснюється за допомогою реле противмикання назад РПН. При спрацьовуванні КН його контакт у колі живлення котушки РПН замикається. Однак, РПН не спрацьовує, і контактори КП, КТ2, КУ1, КУ2 і КУ3 залишаються не включеними. Двигун М1 продовжує гальмуватися по характеристиці 1п. Для того, щоб РПН не спрацювало на початку гальмування, напруга на його котушці повинна бути близькою до нуля. Це досягається відповідним приєднанням нижнього за схемою виводу котушки РПН через додаткові опори R1 й R2.
У міру зниження швидкості обертання М1 напруга на котушці РПН буде зростати, і при швидкості, близькій до нуля, РПН спрацьовує. Якщо процес гальмування здійснювався для зупинки крана, то необхідно перевести рукоятку КК у нульове положення. У протилежному випадку при замиканні контакту РПН двигун після зупинки почне розганяти по характеристиці 1п у третьому квадранті в напрямку назад і буде працювати на ній у сталому режимі. Надалі, залежно від положення рукоятки КК, він може працювати на кожній з характеристик у третьому квадранті, аналогічних характеристикам у першому квадранті. При цьому кран буде з різними швидкостями переміщатися в напрямку назад.
Крани з великою швидкістю пересування за час електричного гальмування встигнуть пройти шлях у кілька метрів. Тому з метою безпеки (не спрацював кінцевий вимикач і механічне гальмо) між кінцевим вимикачем і краєм підкранової колії створюється мертва зона, яку кран не обслуговує. Для цього випадку в схемі передбачене шунтування кінцевих вимикачів ВКВ, ВКН замикаючим контактом реле РТ. Припустимо, що в режимі вільного вибігу кран вийшов із зони кінцевого захисту й розімкнув ВКВ. Втрачає живлення котушка й відключається реле РН. Розривається коло живлення котушки й відключається контактор КТ. Головні контакти КТ розривають коло живлення котушки ТМ, і механічне гальмо загальмовує механізм пересування крана. Одночасно замикається контакт КТ у колі живлення котушки РТ й , тому що контакт КЛ перебуває в замкнутому стані, одержує живлення котушка й спрацьовує реле РТ. Замикаючий контакт РТ шунтує ВКВ і ВКН. Одержує живлення котушка й спрацьовує реле РН. При переводі рукоятки КК у напрямку уперед спрацьовують контактори КЛ, КТ, КТ1 і КВ і кран починає рух в мертвій зоні від місця розташування ВКВ до краю підкранової колії. При спрацьовуванні КЛ його розмикальний контакт розриває коло живлення котушки РТ. По закінченні часу витримки РТ його контакт розмикається й механічне гальмо знову спрацьовує. Якщо за час витримки РТ кран не досягне необхідного положення в мертвій зоні, то рукоятку КК переводять у нульове положення, а потім знову в напрямку уперед. Повернення з мертвої зони у робочу здійснюється за допомогою контакта РПН, котрий шунтує ВКВ.
Максимальний-струмовий захист здійснюється за допомогою двох струмових реле РМ1, РМ2. Коли струм у якірному колі М1 перевищує припустиме значення (Iя ≥2.5Iном), якорі РМ1, РМ2 впливають на загальну скобу й розмикають допоміжний контакт РМ. Цей контакт включений у колі живлення котушки реле РН. Тому реле РН відключається й, розмикаючи свої контакти, розриває коло живлення котушок всіх контакторів схеми. Двигун відключається й загальмовується механічним гальмом.
Дослідження електромеханічних характеристик двигуна М1 здійснюється за допомогою навантажувального агрегату, до складу якого входять: генератори постійного струму незалежного збудження G1, G2 й асинхронний короткозамкнений двигун М2. Генератор G1 приводиться в обертання двигуном М1, а генератор G2 - двигуном М2. Величина струму в обмотках збудження LG1 й LG2 генераторів, а отже, і величина їх ЕРС регулюється, відповідно, за допомогою повзункових реостатів R5 й R4. Крім того, за допомогою перемикача S1 можна змінювати полярність напруги, що прикладається до LG2, і в такий спосіб змінювати напрямок ЕРС генератора. При працюючих М1, М2 і розімкнутому автоматичному вимикачі QF3 показання вольтметра визначаються алгебраїчною сумою електрорушійних сил генераторів G1 й G2. За допомогою перемикача S1 і резистора R4 можна величину ЕРС G2 установити рівною ЕРС G1, але включеною стосовно неї зустрічно. Алгебраїчна сума ЕРС G1 й G2 у цьому випадку виявиться рівною нулю, і вольтметр PV1 буде давати нульові показання. При замиканні QF3 якорі G1 й G2 утворять загальне коло, величина струму в якому дорівнює нулю. Якщо тепер за допомогою R4 зменшувати струм в обмотці збудження G2, то його ЕРС стає меншою ЕРС G1, і G2 стосовно G1 починає працювати в режимі двигуна. Генератор G1 стосовно G2 працює в генераторному режимі й тим самим створює навантаження для двигуна М1. Величина навантаження буде тим більша, чим більша буде різниця між величинами ЕРС G1 й G2. Струм навантаження М1 реєструється амперметром РА1, а швидкість обертання - вольтметром PV2, підключеним до якоря тахогенератора BR.
Для виключення можливості роботи М1 у режимі холостого ходу паралельно якорю G1 постійно приєднаний резистор R7. Струм холостого ходу і якірного кола М1 не повинен бути менше 5А.
Зібрати вимірювальну частину схеми, що включає в себе автоматичні вимикачі QF1, QF2, QF3, вольтметри PV1, P2, амперметр РА1, повзункові реостати R4, R5 і клемну дошку, на якій установлені перемикач S1, кнопки КА й кінцеві вимикачі ВКВ, ВКН. Рукоятки автоматичних вимикачів повинні перебувати в положенні 0.
Запустити досліджуваний двигун М1. Для цього необхідно рукоятку КК поставити в нульове положення. За допомогою R5 установити в обмотці збудження G1 номінальний струм. Включити QF1. Перевести рукоятку КК у перше положення заданого напрямку. Після того, як М1 досягне сталої швидкості обертання, за допомогою R5 установити струм у якірному колі М1, контрольований РА1, рівним 5А.
Запустити навантажувальний агрегат. Для чого необхідно переконатися в тім, що РУКОЯТКА QF3 ПЕРЕБУВАЄ В ПОЛОЖЕННІ 0. Потім включити QF2. Після того, як М2 досягне сталої швидкості обертання, за допомогою R4 домогтися нульових показників PV1. Якщо це не вдається, перевести S1 в інше положення. ТІЛЬКИ ПРИ НУЛЬОВИХ ПОКАЗАННЯХ PV1 ВКЛЮЧИТИ QF3.
Зняти електромеханічну характеристику на першому положенні рукоятки КК. Для цього за допомогою R4 збільшувати навантаження М1, фіксуючи через кожні 2-3 А показання PА1 й PV2. Особливо ретельно зафіксувати показання РА1, при яких швидкість М1 буде дорівнює нулю. Струм у якірному колі М1 збільшувати до 25А. Якщо R4 виявиться в крайнім положенні при менших показаннях РА1, необхідно перевести S1 в інше положення. По закінченні досліду перевести S1 і повзунок R4 у початковий стан і зняти навантаження з М1. РОЗІМКНУТИ QF3.
Зняти електромеханічну характеристику на другому положенні рукоятки КК. Для цього перевести рукоятку КК у друге положення. За допомогою R5 установити струм у якірному колі М1 рівним 5А. За допомогою R4 й S1 домогтися нульових показань РV1. Включити QF3. За допомогою R4 збільшувати навантаження М1, фіксуючи через кожні 2-3 А показання РА1 і РV2. Струм у якірному колі М1 збільшувати до 25 А. Якщо повзунок R4 виявиться в крайнім положенні при менших показаннях РА1, необхідно перевести в інше положення S1. По закінченні досліду перевести R4 у початковий стан і зняти навантаження з М1. РОЗІМКНУТИ QF3.
Зняти електромеханічні характеристики М1 на третім і четвертому положеннях КК. Досліди проводяться аналогічно описаному в п.8.7. Наприкінці кожного досліду РОЗМИКАТИ QF3.
Зняти електромеханічну характеристику М1 на першому положенні КК при шунтуванні якоря М1 опором динамічного гальмування. Для цього перевести рукоятку КК із четвертого положення в перше. Дослід проводити аналогічно описаному в п.8.7. Наприкінці досліду РОЗІМКНУТИ QF3 й QF2. ВІДКЛЮЧИТИ R4 ВІД НАПРУГИ МЕРЕЖІ.
Переконатися , що магнітний контролер забезпечує плавне наростання швидкості М1 при автоматичному пуску. Для цього рукоятку КК перевести в перше положення й за допомогою R5 установити струм у якірному колі М1, рівним 5А. Перевести рукоятку КК у нульове положення. А потім, після зупинки М1, рукоятку КК перевести з нульового положення в четверте положення, і за допомогою електронного осцилографа зняти залежності, що характеризують зміну в часі струму й швидкості М1 при пуску. При знятті осцилограми струму на вхід осцилографа подавати напругу із шунта РА1, а при знятті осцилограми швидкості - напругу з виходу ВR.
Перевірити роботу нульового й кінцевого захистів схеми. Для перевірки нульового захисту при роботі М1 на першому положенні КК відключити, а потім включити QF1.
На підставі отриманих експериментальних даних побудувати електромеханічні характеристики електроприводу в чотирьох квадрантах.
По осцилограмі струму якоря М1 визначити витримки часу, на які настроєні реле прискорення РУ1, РУ2, РУ3, а також значення пускового струму й струмів перемикання М1.
струму.
в режимі роботи М1, як двигуна.
механізму пересування крана.
агрегату лабораторної установки.
електричних принципових схемах електромагнітного реле часу.
ХАРАКТЕРИСТИКА АВТОМАТИЗОВАНИХ ЕЛЕКТРОПРИВОДІВ
Схему вмикання двигуна в системі П-Д приведено на рис. 1а. Якір двигуна М живиться від керованого перетворювача П, у якості якого можуть використовуватися електромашинні, електромагнітні або напівпровідникові пристрої. Незалежно від принципу дії будь-який з названих пристроїв здійснює, перетворення напруги змінного струму Uс в напругу постійного струму U (випрямляння), і забезпечує можливість регулювання величини і полярності випрямленої напруги. Статичну характеристику реверсивного перетворювача приведено на мал. 1б. При зміні управляючого сигналу від значення +Uун до -Uун ЕРС перетворювача Еп змінюється від +Епн до -Епн. Розташування точки номінального режиму на статичній характеристиці таке, що при Uу> Uун ЕРС перетворювача може на 3040% перевищувати номінальне значення.
Обмотка збудження двигуна LM живиться від окремого джерела. Величина струму в ній Iв регулюється за допомогою резистора Rв.
Lп і двигуна Lя, активні опір якоря Rя і перетворювача Rп, ЕРС обертання Е, що індуктується в обмотці якоря М.
(dIя/dt=0) матиме вигляд:
Еп=IяRя+ IяRп+Е.
Е=кФω
Підставивши в рівняння рівноваги ЕРС вираз для Е і вирішивши його щодо ω, отримаємо рівняння електромеханічної характеристики двигуна ω=f(Iя):
![]() ,
,
Δωс2 складові статичного падіння швидкості Δωс.
позначено цифрою 1.
двигуна прямопропорційно залежить від струму якоря М=кФІя, то механічна характеристика двигуна ω= f(M) матиме такий же вигляд і відрізнятиметься від електромеханічної тільки масштабом по осі абсцис.
Нахил характеристики 1 до осі абсцис більше, ніж у наведеній там же природної характеристики, оскільки через падіння напруги від якірного струму на внутрішньому активному опорі перетворювача при одному і тому ж струмі якоря (моменті опору) до статичного падіння швидкості на природній характеристиці Δωс1=IяRя/кФ додається складова Δωс2= IяRп/кФ.
При зміні управляючого сигналу Uу змінюється величина Еп, що у свою чергу веде до зміни швидкості ідеального холостого ходу ω0. Обидві складові статичного падіння швидкості від величини Еп залежать і тому при зміні Еп залишаються постійними. Отже, при зміні управляючого сигналу від Uун до нуля штучні характеристики двигуна виходять паралельним перенесенням вниз прямої 1. Таким чином забезпечується плавне регулювання швидкості двигуна вниз від основної.
в даному випадку обмежений і не може перевищувати величини Д=(810):1. Це пов'язано, по-перше, з необхідністю зберігати перевантажувальну здатність двигуна. Для двигунів постійного струму з незалежним збудженням коефіцієнт перевантаження по струму якоря (моменту) кп, визначуваний як відношення допустимого струму Iя доп до номінального струму якоря Iя Iя доп/ Iя . Отже, характеристика 2 на мал.1г, одержувана при паралельному перенесенні характеристики 1, є останньою, на якій зберігається перевантажувальна здатність двигуна, а діапазон регулювання швидкості, визначуваний звичайно при Iя
Sх
 ,
,
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1450
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved