| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
SISTEMUL EUROPEAN DE REFERINTÃ EUREF
1 Generalitati
Avantajele tehnologiei GPS au fost recunoscute cu multi ani in urma, si astfel a fost organizata o prima campanie GPS in scopul de a stabili un Cadru uniform European de Referinta (EUREF) in partea vestica a Europei. Prin campanii succesive GPS, reteaua a fost extinsa spre partile estice ale Europei si in unele tari s-au efectuat campanii mai sustinute. Cooperarea internationala in interiorul Europei a avut ca rezultat realizarea unei precizii foarte mari a retelei geodezice tridimensionale cu legaturi la sistemele de referinta globale si nationale.
S-au dezvoltat strategii si linii de ghidare pentru indesirea retelei, proceduri de observare, flux de date si analize de date. Aceasta a condus la reteaua permanenta GPS de azi, cuprinzand mai mult de 80 de statii, service de pastrarea datelor si este sustinuta de 12 centre de analiza. Rezultatele arata o retea densa si precisa (+/-3mm in componenta orizontala, +/-6mm in componenta de altitudine).
Din 1995, accentul a fost pus pe componenta de altitudine, rezultand o adaptare, extindere si o imbunatatire a Retelei de Nivelment a Uniunii Europene (UELN) si stabilirea unei Retele de Referinta GPS pe Verticala Europeana (EUVN). Astazi, contributiile retelei EUREF se indreapta spre activitati multi-disciplinare cum ar fi estimarea parametrilor meteorologici si legarea mirelor de maree (stabilirea altitudinilor zero ale diverselor mari si diferentele dintre ele).
Pentru a intelege mai bine aspectele legate de realizarea retelei EUREF, este necesara definirea unor termeni de referinta. In pozitionarea geodezica, unde tehnicile de observare dau pozitiile absolute intr-un sistem terestru de referinta este fundamental sa ai definit un sistem terestru si inertial de referinta.
2 Sisteme de referinta si cadre de referinta
2.1 Sistemul de Referinta International Ceresc (ICRS - International Celestial Reference System)
Sistemul de Referinta International Ceresc (ICRS) si Sistemul Terestru International de Referinta (ITRS - International Terrestrial Refrence System) sunt doua sisteme care rezolva problemele geodezice si geodinamice cu precizie foarte mare. Ambele sisteme sunt realizate prin cele mai avansate si precise tehnici bazate pe cooperare internationala si sunt intretinute cu costuri ridicate. ICRS este baza pentru realizarea unui sistem inertial care serveste, printre altele, la descrierea miscarii corpurilor ceresti si a satelitilor artificiali. ITRS reprezinta cel mai precis sistem terestru de referinta si care este sursa pentru realizarea unui alt sistem de referinta (de exemplu WGS84) si a sistemelor de referinta regionale (de exemplu ETRS89). ICRS consta in algoritmi si constante recomandate pentru realizarea lui si a Cadrului de Referinta International Ceresc (ICRF). Algoritmii si constantele contin, de obicei, un set de parametri si proceduri calculate (de exemplu formule pentru precesie si nutatie, coeficientii precesiei, amplitudinea nutatiei, viteza luminii, etc.).
2.2 Cadrul de Referinta International Ceresc (ICRF - International Celestial Refernece Frame)
Cum a fost spus mai sus, in concordanta cu recomandarea Uniunii Astronomice Internationale (IAU), ICRS este realizat de ICRF. ICRF este definit de coordonatele ecuatoriale precise J2000.0 a sursei radio extragalactice determinate cu observatii Interferometrice (VLBI - Very Long Baseline Interferometry). Este un cadru a carei directie este in concordanta cu cea din catalogul FK5. Originea este localizata in baricentrul sistemului solar in conformitate cu modelul observatiilor in cadrul relativitatii generale. Stabilitatea cadrului este bazata pe presupunerea ca sursa nu are propria ei miscare. Sunt efectuate verificari permanente pentru a se asigura ca aceasta ipoteza este reala. Estimarea coordonatelor, realizate de IERS, se bazeaza pe cadrul individual produs de Centrul de Analiza al IERS. In fiecare an sunt realizate cadre extragalactice de grupuri independente VLBI. Selectia este facuta de ICRF. Algoritmul selectat este proiectat la inceput pentru mentinerea directiilor axelor fixate pe realizarea succesiva, in timp ce coordonatele surselor individuale sunt perfectionate. Unele erori sistematice in pozitionarea surselor si in orientarea axelor pot fi cauzate de precizia slaba a teoriei precesiei si nutatiei a conventiei IAU. Erorile sunt de nivelul a catorva milisecunde de arc. Alt tip de posibile erori sistematice sunt legate de elevatia joasa a observatiilor in cazul extinderii nord-sud a observatiilor in retea. Accesul la ICRS se poate face prin catalogul surselor de coordonate publicat in Raportul Anual IERS. Este inclus un total de 608 obiecte ale caror coordonate vor fi monitorizate pe baza unor noi observatii si a unei noi analize.
2.3 Sistemul Terestru Conventional de Referinta (CTRS - Conventional Terrestrial Reference System)
Pentru rezolvarea problemelor practice de navigatie, geodezie, geodinamica, geofizica si alte geostiinte, este necesar sa avem un sistem de coordonate legat de pamant. Astfel, este necesar sa definim un sistem geocentric, terestru, care sa faca posibil rezolvarea problemelor de pozitionare cu un bun nivel de precizie. Sistemul Terestru Conventional de Referinta (CTRS) adoptat de toate metodele de analiza a seturilor de date individuale pe baza de observatii tehnice (VLBI, SLR, LLR, GPS, DORIS, PRARE) sau combinatii de solutii individuale intr-un set unificat de date (coordonate ale statiilor, parametri de orientare ai Pamantului, etc.), urmareste, in conformitate cu rezolutia IAG nr. 2, adoptata de Adunarea Generala a IUGG din Viena, 1991, urmatoarele criterii:
CRTS este un sistem local de coordonate in sensul teoriei relativiste valabila pe Pamant si este in jurul nivelului de precizie de 10-10;
CTRS este un sistem cvasicartezian de rotatie, definit de un sistem geocentric non-rotativ de o rotatie a spatiului;
Coordonata timp, coordonata geocentrica timp (TGC);
CTRS este geocentric, centrul de masa fiind definit de intreg Pamantul, inclusiv oceanele si atmosfera;
Scara este cea a cadrului Pamant local, in intelesul teoriei relative a gravitatiei;
Orientarea este data initial de orientarea BIH la 1980, axa Z este indreptata spre polul de referinta IERS, care este identic cu CIO (Originea Conventionala Internationala), iar axele X si Y de la meridianul zero, identic cu realizarea 1980 a BIH;
Evolutia in timp a orientarii va crea rotatii globale nereziduale cu privire la miscarile crustale.
2.4 Sistemul Terestru de Referinta (Terrestrial Reference System)
Un sistem Conventional Terestru de Referinta este realizat printr-un sistem cadru de referinta, ca de exemplu un set de coordonate pentru o retea de statii. Observatiile tehnice sunt: VLBI, SLR, LLR, GPS, DORIS si PRARE sau combinatii ale lor. Realizarea este specificata de coordonate ecuatoriale carteziene, in acest caz coordonatele geografice fiind referite la elipsoidul GRS80. Sistemul Conventional Terestru de Referinta care este monitorizat de Serviciul International de Rotatie al Pamantului (IERS), este denumit Sistemul International Terestru de Referinta (ITRS - International Terrestrial Reference Frames). Fiecare tehnica spatiala geodezica furnizeaza un set de date corespunzator, din analiza caruia rezulta realizarea ITRS. In interiorul ITRS, fiecare Cadru Terestru de Referinta este exprimat direct sau dupa transformare ca o realizare a ITRS. Pozitia unui punct localizat pe suprafata fizica a Pamantului, la o epoca t, cu coorodonatele X(t), functie de timp este data de expresia:
![]() (1)
(1)
in care:
DXx este corectia datorata efectului de schimbare in timp (un permanent efect este cel al mareei terestre, greutatea oceanelor, mareele polare, reculul postglacial, incarcarea atmosferica, efectele seismice si vulcanice, variatia nivelului apei subterane, variatia centrului de masa al Pamantului),
X0, t0 sunt coordonatele si timpul la epoca initiala. Pentru a obtine precizia ceruta de 10-10, corectiile trebuie sa fie determinate cu o precizie de circa 1 milimetru.
Realizarea ITRS este produsa de IERS sub numele de Sistemul International Terestru de Referinta (ITRF - International Terrestrial Reference Frames). Aceasta realizare consta in lista coordonatelor si viteza pentru statiile selectate de IERS. IERS este reprezentata de realizarea unor imbunatatiri succesive ale pozitiei, cunoscute ca ITRF-YY si publicate de Raportul Anual IERS pe anul YY. Pornind de la eticheta data de ITRF-YY, se poate deriva un cadru corespunzator ETRF-YY care reprezinta coorodonatele statiilor apartinand lui ITRF si localizate in Europa.
2.5 Sistemul Geodezic Mondial 1984 (WGS84 - World Geodetic System)
Sistemul terestru de referinta utilizat de Departamentul de Aparare al U.S. (DoD - Departament of Defense) pentru pozitionarea GPS este WGS8 Acest sistem global geocentric este al patrulea in seria de sisteme de coordonate geocentrice definite de DoD din 1960. Sistemul Geodezic Mondial 1960 a fost succedat de sisteme imbunatatite in 1966 si 1972, culminand cu WGS84, cincisprezece ani mai tarziu. Acest Sistem Conventional Terestru de Referinta furnizeaza un set de modele globale coerente si este baza pentru toate planurile si hartile produse de DoD, pentru navigatie si geodezie. Se baza pe observatii TRANZIT Doppler amplasate pe niste statii de urmarire. Aceste tehnici satelitare TRANZIT pun la dispozitie un cadru global de referinta cu o precizie estimata la 1-2 metri. In ultima decada, datorita eforturilor depuse de comunitatea stiintifica si tinand cont de cerintele de precizie de milimetru, s-au obtinut rezultate bune in precizia cadrului terestru de referinta (ITRF). Printre cerinte, DoD a dorit o pozitionare cu precizie de un decimetru. Din acest motiv, NIMA a facut o revizuire a sistemului WGS84 si a initiat un efort de a sustine cerintele DoD privind precizia de pozitionare. Acest efort a inclus imbunatatirea coordonatelor statiilor GPS de urmarire, rafinarea modelului gravitatii terestre, imbunatatirea modelului de geoid (EGM96) cu referinta la verticala lumii si o examinare a altor modele si parametri implicati in definirea sistemului WGS8 Dupa unele incercari care au inclus mai multe constante precise in acord cu standardele IERS, ultima versiune numita WGS84 (G873), coincide cu ITRF 96 cu o diferenta de cativa centimetri. Pe viitor cercetarile se vor focusa pe un model de gravitate al Pamantului si va fi asociat cu geoidul. Cadrul de referinta se va ghida spre miscarea placilor tectonice si o noua stationare a statiilor. O cerinta a utilizatorilor de GPS este introducerea in modelul de calcul a efectului mereei terestre.
2.6 Transformari intre sisteme de referinta
Relatiile de transformare intre ICRF si ITRF sunt date de formula:
![]() (2)
(2)
In care P este matricea precesiei, N este matricea nutatiei, T este matricea care da rotatia fata de timpul sideral adevarat S, iar XY sunt matricele de transformare din cadrul terestru in cadrul conectat la polul instantaneu, XICRF este vectorul referit la ICRF si, similar, XITRF este vectorul referit la axele ITRF.
Formulele de transformare intre doua sisteme terestre de referinta sunt cele cunoscute si vor fi tratate in capitolul de transformari de coordonate.
In tabelul 1 sunt prezentate valorile numerice ale parametrilor de transformare dintre ITRF97 si precedentele realizari ITRF-YY. De notat ca pentru a completa diferenta pentru ITRF93, trebuie introdusa in sistem schimbarea timpului "/y". ITRF97 a fost creat prin combinarea coordonatelor a 325 de statii cu mai mult de 550 de observatii. Setul de coordonate provine din tehnici spatiale individuale (4 solutii individuale VLBI, 5 SLR, 6 GPS, 3 DORIS, 1 combinata SLR+DORIS), colectate de IERS in 1998-1999.
TABELUL 1 Parametri de transformare dintre ITRF97 si cadrele precedentele
|
Cadru de referinta |
T1 cm |
T1 cm |
T1 cm |
D Ppb |
R1 mas |
R2 mas |
R3 mas |
An epoca |
|
ITRF88 | ||||||||
|
ITRF89 | ||||||||
|
ITRF90 | ||||||||
|
ITRF91 | ||||||||
|
ITRF92 | ||||||||
|
ITRF93 |
-0.29y |
-0.04y |
0.08y |
-0.11y |
-0.19y |
-0.05y | ||
|
ITRF94 | ||||||||
|
ITRF96 |
2.7 EUREF - Evolutie, statutul actual si perspective.
In 1987, IAG la Adunarea Generala din Vancouver si CERCO la Adunarea Plenara din Atena au decis independent sa dezvolte un nou Sistem Geodezic European de Referinta bazat pe GPS si care sa indeplineasca urmatoarele cerinte:
reprezentarea unui cadru geocentric de referinta pentru orice proiect geodezic-geodinamic de precizie pe platoul European;
sa fie o referinta precisa si foarte apropiata de WGS84 pentru a fi utilizata in geodezie si in toate felurile de navigatie in intreaga Europa;
sa fie o referinta larga, continentala, pentru seturile de Data Cartografica Digitala multinationala, derivate din multiplele seturi de Datumuri nationale existente in Europa.
ED50, respectiv ED87 nu indeplinesc cerintele speciale privind precizia generala si orientarea pozitiei globale tridimensionale. Pe de alta parte WGS84 nu poate garanta cerintele privind precizii foarte mari, in principal derivate din observatii Doppler la timpul respectiv.
La sfarsitul anilor 80, IERS combinat cu solutiile date de SLR/VLBI (ITRF), au furnizat realizarea celui mai bun sistem geodezic global de referinta. Subcomisia EUREF a IAG si CERCO WGVIII au agreat Sistemul de Referinta European bazat pe ITRF si au selectat circa 35 de statii Europene SLR si VLBI sa faca parte din solutia ITRF calculata pentru epoca 1989.0. Acestea au fost stabilite ca set de baza al sistemului geocentric de coordonate definit ca ETRF89 (Sistemul Terestru European de Referinta), primul Sistem de Referinta European (ETRS89) realizat. Epoca selectata, 1989.0 (ETRF89) este un subset al solutiei globale ITRF89.
Datorita deplasarii placilor tectonice, coordonatele statiilor subsetului European se modifica in timp cu circa 2.5 centimetri pe an (dupa alti autori 2.7 centimetri pe an). Totusi, s-a convenit ca ETRS89 s-ar roti cu toata partea stabila a Europei, astfel ca relatia statie-statie (diferenta relativa) se pastreaza fixa. Desigur, pornind de la aceasta ipoteza, o definire a coordonatelor statiilor in alt sistem de referinta se poate schimba usor in timp. Parametri de transformare din ITRF in ITRF89, respectiv ETRF89 sun liniari. In consecinta, parametri de transformare dintre ETRF si WGS84 vor varia usor si vor trebui actualizati la circa 10 ani ca interval de timp, tinand cont de deplasarea placii Europene care nu mai poate fi neglijata.
Din cercetarile efectuate, la inceput, ITRF89, respectiv ETRF89, fata de WGS84 aveau o diferenta de 1-2 centimetri. In prezent, diferenta este de cativa centimetri. Elipsoidul de referinta pentru EUREF este elipsoidul GRS 80, care nu diferam mult fata de elipsoidul WGS8
Pricipalele campanii ale proiectului au fost desfasurate in anul 1989 pentru Vestul Europei si incepand din 1991 noul cadru de referinta a fost extins pe majoritatea teritoriul European si in zonele adiacente. In prezent EUREF acopera cele mai multe tari Europene cu exceptia Rusiei si Belarusiei. De asemenea in cele mai multe tari reteaua este indesita. In Tabelul 2 se prezinta distributia statiilor EUREF in Europa. In functie de datele culese intr-o perioada de 10 ani, s-au stabilit mai multe clase de precizie in functie de modul de campanie GPS. Clasa A reprezinta o precizie absoluta de 1 centimetru in cadrul sistemului ITRF in perioada 89-99, clasa B are precizia de 1 centimetru la epoca data (la care s-au executat masuratorile), iar clasa C are o precizie de peste 5 centimetri in perioada 89-99.
TABELUL 2 Campanii EUREF
|
Nr. crt. |
Denumire |
Interval de timp |
Nr. de statii |
Tara |
|
0 |
ITRF | |||
|
1 |
GPS EUREF 89 |
Mai 89 |
Europa |
|
|
2 |
Mobile VLBI 89 |
Iunie - sept 89 |
Europa |
|
|
3 |
EUREF NW 90 |
Iul - Aug, 90 |
Nord vest |
|
|
4 |
EUREF CS/H 91 |
Oct - Nov 91 |
Cehoslovacia, Ungaria |
|
|
5 |
Mobile VLBI 92 |
Mai - Aug 92 |
Europa |
|
|
6 |
EUREF POL 92 |
Iulie 92 |
Polonia |
|
|
7 |
EUREF BAL 92 |
Aug - Sep 92 |
Baltic |
|
|
8 |
EUREF BUL 92 |
Oct 92 |
Bulgaria |
|
|
9 |
EUREF GB 92 |
Oct 92 |
M. Britanie |
|
|
EUREF CYP 93 |
Ian 93 |
Cipru |
||
|
EUREF D93 |
Mai 93 |
Germania, Olanda |
||
|
EUREF F93 (RRF93) |
Mar - Apr 93 |
Franta |
||
|
EUREF LUX BD4 |
Mar 94 |
Luxemburg, Belgia, Germania |
||
|
EUREFSLO/CRO 94 |
Mai - Iun 94 |
Croatia, Slovenia |
||
|
EUREF DK 94 |
Aug - Sep 94 |
Danemarca |
||
|
16 |
EUREF Ucraina 94 |
Iun 94 |
Ucraina |
|
|
17 |
EUREF ROM 94 |
Sept 94 |
Romania |
|
|
18 |
EUREF NOR 94/95 |
Sep-Oct 94 Aug - Oct 95 |
Norvegia |
|
|
19 |
EUREF A 94/95 |
Oct 94/95 |
Austria |
|
|
20 |
EUREF EIR/GB 95 |
Apr 95 |
Islanda, GB |
|
|
21 |
EUREF Iberia 95 |
Mai 95 |
Spania, Portugalia |
|
|
22 |
EUREF Iceland 95 |
Iul 95 |
Islanda |
|
|
23 |
EUREF FYROM 96 |
Aug 96 |
Macedonia |
|
|
24 |
EUREFMalta 96 |
Oct-Nov 96 |
Malta |
|
|
25 |
EUREF Balear 98 |
Apr 98 |
Baleare |
|
|
26 |
EUREF Alb., BH, Yug. |
Sept 98 |
Albania, Bosnia Hert., Iugoslavia |
|
|
EUREF Moldova |
Mai 99 |
Moldova |
Densitatea si intretinerea sistemului EUREF este data in principal de sistemele GPS si are ca rezultat cresterea numarului de statii GPS permanente in Europa. Aceste statii au ca principale scopuri:
furnizarea legaturii dintre ETRS/ITRS si sistemele nationale de referinta prin EUREF/IGS;
aplicatii ale masuratorilor bazate pe post procesare;
masuratori in timp real si/sau masuratori de precizii diferite (DGPS, RTK);
monitorizarea miscarilor de teren (ridicari post glaciale, miscari tectonice de-a lungul faliilor active, etc).
Cele mai multe din statiile permanente nu sunt o parte a retelei globale ICS. Simpozionul EUREF din 1995 cu tema "Apel pentru indesirea sistemului ITRF prin analiza regionala GPS ca Centru de Analiza a Retelelor Asociate IGS" propune IGS-ului sa considere reteaua permanenta EUREF ca o indesire a retelei globale IGS. Propunerea a fost acceptata oficial de IGS in mai 1996. In acest context EUREF garanteaza o analiza de rutina a datelor din statiile permanente Europene pe baza procesului de distributie . Procesul este asigurat de 10 Centre Locale de Analiza care saptamanal supun spre cercetare solutii pentru o subretea EUREF Centrului de Analiza Regional (CODE Berna), care este responsabil pentru combinarea saptamanala a solutiilor subretelelor libere intr-o solutie Europeana realizata de IGS. In mai 1997, centrul de analiza CODE a transmis prima solutie anuala EUREF catre IERS si de atunci toate statiile permanente au fost incluse in realizarea ITRS si a fost posibila utilizarea lor ca statii de analiza a campaniilor EUREF. Initial reteaua consta din 50 de statii permanente in timp ce azi sunt aproape 50 de statii GPS permanente care contribuie la solutia combinata Europeana. Unele din acestea furnizeaza in fiecare ora fisiere cu date pentru aplicatii GPS meteorologice. Rezultatele Retelei Permanente EUREF sunt coordonate de Observatorul Regal din Belgia, iar acum sunt pe cale de a fi preluate de Serviciul de Retea EUREF care ar consta din statii permanente, centrul de date, centrul de analiza, o conducere executiva, un birou central si unul de proiecte speciale.
3 EUREF si sistemele nationale terestre de referinta.
Dupa cum s-a discutat, este inca putin prematur de spus daca tehnologia GPS permite o stabilire completa si foarte precisa a cadrului de referinta 3D, care sa prezinte omogen pozitia pe intreg globul. In Europa dezvoltarea rapida in timpul ultimei decade a dus, in cele mai multe tari, la situatia in care reteaua noua (ETRF) coexista cu retelele clasice planimetrice si altimetrice care sunt utilizate pe scara larga de un mare numar de topografi care utilizeaza aparatura clasica. In timp ce reteaua ETRF este caracterizata de un grad mare de precizie, omogenitate si integritate, de o densitate variabila de la 1 punct la 50 km2 la 1 punct la 500 km2, retelele nationale se disting prin separarea pozitiei orizontale de pozitia altimetrica, prin referirea la coordonatele nationale plane si altimetrice, densitatea este de 1 punct la 2-20 km2, in funtie de zona, prin precizia mai saba comparativ cu cea obtinuta din date GPS, prin omogenitatea mai slaba a retelei. In prezent sunt 46 de tari in Europa si, prin acordul de la Grothenn (1994), sunt utilizati 5 elipsoizi diferiti si cel putin 8 proiectii cartografice.
Prima problema consta in determinarea parametrilor de transformare dintre sistemul national de referinta si ETRF. De obicei se reduce la alegerea numarului de puncte cu coordonate comune in ambele sisteme si la distrbutia lor. Ambele aspecte sunt direct legate de zona si de altitudine (panta terenului in zona). Se pune inevitabil intrebarea: cum ar putea reteaua GPS sa imbunatateasca reteaua nationala? Cu respectarea "traditiei" topografice si geodezice privind realizarea planurilor si hartilor existente, cu economie de timp si pret, cu cerintele necesare in prezent pentru o retea geodezica, cadrul ETRF raspunde in general urmatoarelor cerinte:
Sa permita o utilizare directa a tehnologiei GPS (reprezentarea pe un set de coordonate geocentric);
Sa permita utilizarea tehnicilor clasice terestre de masurare (reprezentarea intr-un set de coordonate plane, referite la un sistem national de proiectie);
Sa permita utilizarea hartilor existente la scara 1:1000 sau mai mici, fara modificari;
Sa ajute lucrarile ingineresti, de cadastru, si aplicatii GIS/LIS cu coordonate;
Sa faca o utilizare extensiva a sistemului de referinta existent.
In prezent, fiecare tara Europeana care are un proiect EUREF, are ocazia de a-si imbunatati precizia retelei geodezice existente. Se pot obtine coordonate pentru zeci sau sute de puncte de control si, in plus, obtinerea de coordonate ETRF pentru toate punctele care vor sta la baza transformarilor de coordonate si obtinerea parametrilor de transformare. Se pot utiliza diverse strategii pentru imbunatatirea punctelor de control din reteaua ETRF.
Pentru a obtine coordonatele in sistem Stereografic 1970 pentru punctele masurate in sistem WGS 84 se va utiliza algoritmul Helmert pentru determinarea celor 7 parametri. Etapele de lucru sunt descrise mai jos:
1. Existenta a minim cinci puncte comune determinate in sistem absolut WGS 84 si Stereografic 1970. 2. Calculul ondulatiei geoidului pentru punctele comune. Transformarea cotei normale hn in cota elipsoidala he..
3. Transformarea coordonatelor din sistemul Stereografic 1970 (x,y,he)KR prin formulele cu coeficienti constanti, in coordonate geodezice (B,L,he)KR referite la elipsoidul Krasovski.
Transformarea coordonatelor geodezice (B,L,he)KR in coordonate carteziene (X,Y,Z)KR.
5. Coordonatele punctelor comune (X,Y,Z)WGS determinate cu receptoare GPS referite la WGS-84 ºi (X,Y,Z)KR referite la elipsoidul Krasovski sunt folosite la determinarea celor 7 parametri ai transformarii Helmert .
6. Coordonatele (X,Y,Z)WGS pentru alte puncte decat cele comune pot fi transfomate cu ajutorul celor 7 parametri Helmert in (X,Y,Z)KR referite la elipsoidul Krasovski folosind parametri de transformare calculati in pasul anterior.
7. Toate coordonatele carteziene (X,Y,Z)KR pot fi transformate in coordonate geodezice (B,L,he)KR .
8. Punctele cu coordonate geodezice (B,L,he)KR de pe suprafata elipsoidului sunt proiectate pe planul secant (Sistemul Stereografic 1970) prin formule cunoscute de la "Cartografia matematica", rezultand (x,y,he)KR .
9. Se aplica ondulatia cvasigeoidului si se obtine cota referita la cvasigeoid hn. In acest mod s-au obtinut coordonatele plane in sistem Stereografic 1970, iar cota referita la cvasigeoid (x,y,hn)KR.
4 GPS si datumul European de altitudine.
In Europa exista in prezent sisteme nationale de altitudine cu datum diferit. Peste 40 de tari Europene utilizeaza 19 sisteme de referinte a mareei, diferentele respectand masurile de referinta ale mareei UELN (Amsterdam), variind de la +16 la -231 centimetri (Sacher et al. 1999). Statiile de determinare ale mareei ale sistemului de altitudini nationale in Europa sunt amplasate la oceane si mari interne - Marea Baltica, Marea Nordului, Marea Mediterana, Marea Neagra, Marea Adriatica, Oceanul Atlantic. De notat ca datumul utilizat pentru altitudini este de natura istorica si nu toate punctele 0 sunt referite la nivelul mediu al marii. Unele puncte 0 sunt referite la nivelul minim al mareei (Ostend) sau la cel maxim. De exemplu punctul zero pentru Amsterdam este referit la nivelul mediu al mareei din 168 Circa 50% din statele Europene utilizeaza altitudinile normale, 35% altitudinile ortometrice si in jur de 15% altitudinile ortometice normale.
Avand in vedere unificarea sistemului de referinta GPS, CERCO cere urgent realizarea Sistemului European de Altitudini uniform pentru unificarea Datelor de Baza pentru Cartografia Digitala. Noul sistem se va baza pe sistemul de altitudini normale si va fi referit la Mareea masurata la Amsterdam. Inca din 1984 s-a incercat rezolvarea problemei in cadrul Subcomisiei EUREF. Aceasta unificare urmareste doua aspecte. Primul este largirea "extensiva" si "intensiva" a UELN (Reteaua Unificata a Nivelmentului European), care inseamna incorporarea a doua retele: reteaua primara a noilor tari (Central si est Europene) si reteaua de nivelment secundara a tuturor tarilor Europene. Al doilea aspect il reprezinta realizarea unui proiect GPS avand ca tinta interconectarea tuturor datumurilor Europene de nivelment.
In Europa sunt in prezent doua retele continentale de nivelment definind doua sisteme de altitudini: Amsterdam si Baltic. Prima retea continentala de nivelment este UELN, a doua UPLN (Retea de Nivelment Unitara si Precisa) care acopera partea Europeana a fostei Uniuni Sovietice si tarile care au apartinut blocului Sovietic. UPLN consta din liniile de nivelment de ordinul I care traverseaza Bulgaria, Cehia, Germania de Est, Polonia, Slovacia, Ungaria, Belarus, Estonia, Letonia, Lituania, Ucraina, Moldova, Romania, Rusia si Georgia. UPLN a fost masurat in anii `50 si remasurat in anii `70. Contine peste 350 de puncte nodale, observatiile au fost compensate ca diferente de altitudini normale si referite la mareea din Kronstadt (Rusia). Stabilirea UELN a demarat la sfarsitul anilor `70, o noua compensare a fost realizata in 1986 si un nou proiect de extindere si indesire a UELN cu repetarea compensarii a fost lansat in 1995 (UELN-95). Din permanenta compensare trebuie sa rezulte dezvoltarea unei "retele a deplasarilor pe verticala". Observatiile in compensare sunt diferentele de altitudini geopotentiale, parametri estimati sunt numerele geopotentiale. Astfel este usor sa se poata trece de la unitatea geopotentiala la un tip arbitrar de cote. In 1998 UELN avea mai mult de 3000 de puncte nodale. Probleme de rezolvat pe viitor: extinderea retelei la Marea Neagra si fortarea Marii Britanii si a blocului Scandinavic sa incorporeze mai multe linii de legatura a nivelmentului cu tarile baltice.
Obiectivele proiectului EUVN sunt multiple: stau la baza unificarii sistemului European de altitudini care trebuia sa aiba o precizie de cativa centimetri, furnizeaza puncte de referinta pentru determinarea geoidului European, leaga masurarea mareilor la diferite oceane si mari pentru determinarea variatiilor dintre ele si pregateste sistemul de referinta European geocinematic. Proiectul EUVN uneste trei retele Europene: doua de nivelment (UELN si UPLN) si EUREF.
Faza initiala a proiectului, numita EUVN97 a fost realizata in 1997/1998 ca o intelegere (joint venture) a tuturor tarilor Europene participante la EUREF. Totalul de 217 statii EUVN, distribuite in aproape toate tarile Europene cuprind: 37 de statii permanente, 79 de statii EUREF, 53 de puncte nodale pentru nivelmentul de ordinul I si 63 de puncte de masurare a mareei. Toate statiile EUVN au fost legate la retelele nationale de nivelment de ordinul I. Campania GPS a fost realizata simultan pentru toate statiile din 21 mai pana in 29 mai 1997. Precizia obtinuta la compensare a fost de 4-5 milimetri, dar precizia reala nu poate fi mai buna de 10 milimetri. Proiectul continua cu colectarea datelor de nivelment si gravitate.
5 Altitudini GPS si geoidul in Europa.
Dupa cum este cunoscut, definirea altitudinilor nivelurilor marilor este legata implicit de geoid (altitudini ortometrice) sau de cvasigeoid (altitudini normale). Un nou datum vertical poate fi definit prin alegerea suprafatei 0 a (cvasi)geoidului. Astfel, atat adancimile marine cat si altitudinile de pe uscat pot fi incluse in sistemul global geocentric. O data definita suprafata de referinta, altitudinile marilor pot fi determinate prin calcule teoretice sau direct utilizand masuratorile GPS. Fezabilitatea altitudinilor GPS depinde esential de calitatea modelului de geoid pentru teritoriul masurat. Acest model trebuie legat la ambele cadre de referinta GPS si la reteaua de nivelment specifica teritoriului respectiv. Realizarea unui model de geoid precis si omogen este greu de realizat datorita masuratorilor gravimetrice destul de sarace pe intregul continent.
Simultan cu masuratorile GPS si interconectarea nivelmentului diferitelor datumuri Europene se determina un model de cvasi (geoid) foarte precis. Cel mai bun model global geopotential este EGM96 (360,360). S-a dezvoltat intr-un efort comun al NIMA (DoD, USA) si NASA GSFC. Modelul este bazat pe observatii satelitare, anomalii grevimetrice si date altimetrice satelitare.
6 Realizarea retelei EUREF in Romania.
6.1 Reteaua realizata de NGS in anul 1995.
Realizarea retelei EUREF in Romania s-a realizat in anul 1994 printr-un program comun al Ministerului Agriculturii si Alimentatiei din acea vreme, reprezentat de fostul IGFCOT (Institutul de Geodezie, Fotogrammetrie, Cartografie si Organizarea Teritoriului), Directia Topografica Militara si NGS (SUA).
In cadrul acestei determinari s-au efectuat legaturi cu Ungaria, Bulgaria si Turcia. Scopul lucrarii l-a constituit determinarea coordonatelor a 7 puncte de baza, de tipul A (Capitolul 2.7), care sa devina baza pentru determinarile ulterioare ale unor puncte de tipul B sau C. Aceste statii au fost legate la 3 puncte ale retelei EUREF: Madrid (Spania), Onsala (Suedia) si Wettzell (Germania). Coordonatele celor trei puncte erau determinate in sistemul de coordonate ITRF92. In prelucrarea datelor au fost considerate "puncte fixe", fara erori. Initial fusesera alese si punctele Matera (Italia) si Graz (Austria), dar au fost respinse datorita instabilitatii tectonice a primului si a unei erori de cota a celui de al doilea. Coordonatele elipsoidale ale clor trei puncte au fost referite la sistemul ITRF92, epoca 1990. Aceste valori au fost aduse la epoca 1997, utilizand viteza data de IERS si aceste valori au intrat in determinarea coordonatelor retelei EUREF din Romania (Figura 1)
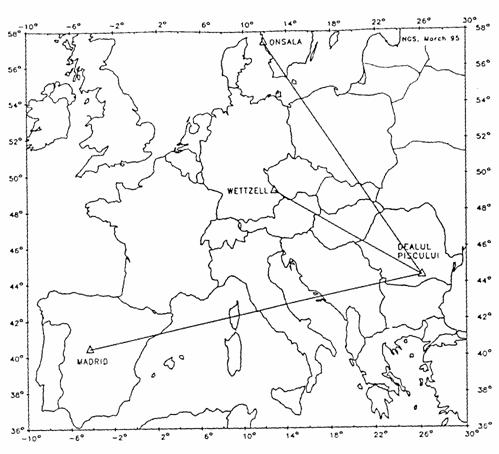
Figura 1- Vectori din trei statii IGS folosite in determinarea coordonatelor
Punctului DEALUL PISCULUI in Bucuresti
Punctele romanesti alese pentru a deveni puncte de ordinul A ale retelei EUREF Romanesti au fost: Constanta, Dealul Piscului, Mosnita, Osorhei, Sfantu Gheorghe, Sarca si Stanculesti. Toate sunt si puncte de ordinul I a retelei nationale geodezice. De asemenea, dupa cum se observa din Figura 2, sunt bine repartizate pe teritoriul Romaniei. Timpul de stationare pe fiecare punct a fost de 4 zile. Colectarea datelor s-a facut la 30", unghiul de elevatie pentru satelitii alesi a fost de 20¿. Precizia dorita pentru coordonatele finale a fost de 5 milimetri + 1:10.000.000. Statia Dealul Piscului, localizata in incinta Observatorului Militar Astronomic, a fost aleasa ca origine a retelei, fiind determinata din cele trei puncte si apoi a devenit punct cu coordonate cunoscute pentru celelalte 6 puncte. Programul de prelucrare al datelor a fost elaborat de specialistii NGS. Tinand cont de data la care a fost realizat, programul a incercat sa cuprinda toate elementele generatoare de erori.
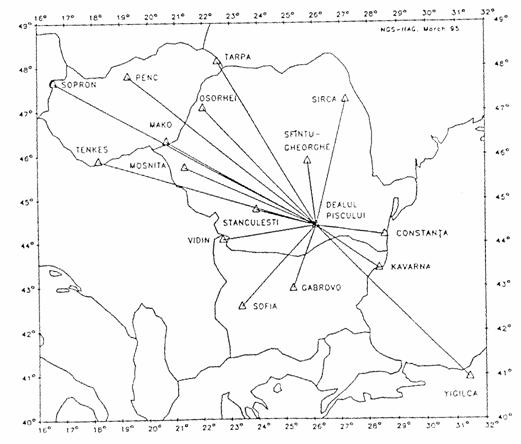
Figura 2 Vectori folositi din DEALUL PISCULUI in Bucuresti pentru
determinarea coordonatelor pentru restul statiilor
Datele inregistrate timp de 4 zile au fost impartite in sesiuni de cate 24 de ore, fiecare fiind calculate separat. Punctul Dealul Piscului a fost determinat din cele trei puncte "vechi". Coordonatele finale ale acestui punct au fost obtinute din media celor patru valori, fiecare valoare venind din trei determinari (Madrid, Onsala si Wettzell). Rezultatele sunt prezentate in Tabelul 3. Coordonatele finale sunt in sistem ITRF92, epoca 1997.
Tabelul 3
|
X |
Y |
Z |
||||
|
4,098,299 m + |
2,008,691 m + |
4,440,543 m + |
||||
|
0.9764 m |
(-4 mm) |
0.1345 m |
(-2 mm) |
0.6464 m |
(-5 mm) |
|
|
0.9806 m |
(0 mm) |
0.1391 m |
(2 mm) |
0.6528 m |
(1 mm) |
|
|
0.9844 m |
(4 mm) |
0.1356 m |
(-1 mm) |
0.6575 m |
(5 mm) |
|
|
0.9811 m |
(1 mm) |
0.1377 m |
(1 mm) |
0.6503 m |
(-1 mm) |
|
|
Media |
0.9806 m 3 mm |
0.1367 m 2 mm |
0.1616 m 4 mm |
|||
Punctul Dealul Piscului a devenit astfel "baza" pentru de terminarea celorlalte 6 puncte. De asemenea, tot din acest punct au fost determinate si alte puncte din Ungaria, Bulgaria si Turcia. Astfel, din Ungaria s-au determinat punctele: Mako, Penc, Sopron, Tarpa si Tenkes, din Bulgaria punctele: Gabrowo, Kavarna, Sofia si Vidin, iar din Turcia punctul Yigilca. Puntele determinate in Ungaria fac parte dintr-o retea care are ca scop determinarea miscarilor crustale in Europa Centrala si de Est. De altfel, in Capitolul 6.2 vom discuta si despre aceasta retea separat.
Din punctul Dealul Piscului s-au determinat deci toate celelalte puncte. Intrucat timpul de stationare cu punctele "vechi", respectiv Madrid, Onsala si Wettzell, oricare punct (Constanta, Mosnita, Osorhei, Sfantu Gheorghe, Sarca sau Stanculesti) putea fi determinat direct din aceste trei puncte. Din motive de timp, doar coordonatele punctului Mosnita au fost determinate separat din punctele Madrid, Onsala si Wettzell, diferenta fata de determinarea din Dealul Piscului fiind de doar 1 milimetru pe axa X, 3 milimetru pe axa Y si 3 milimetri pe axa Z. A fost astfel verificata incadrarea in sistem.
In tabelul 4 sunt prezentate coordonatele rezultate pentru toate punctele nou determinate in sistem ITRF92, epoca 1997, cu preciziile pe fiecare axa (X, Y si Z).
Tabelul 4
|
Denumire punct |
X |
Y |
Z |
sc |
sn |
su |
|
(m) |
(mm) |
|||||
|
CONSTANTA | ||||||
|
MOSNITA | ||||||
|
OSORHEI | ||||||
|
SIRCA | ||||||
|
SFINTU-GHEORGHE | ||||||
|
STANCULESTI | ||||||
|
MAKO, HUNGARY | ||||||
|
PENC, HUNGARY | ||||||
|
SOPRON, HUNGARY | ||||||
|
TARPA, HUNGARY |
| |||||
|
TENKES, HUNGARY | ||||||
|
GABROVO, BULGARIA | ||||||
|
KAVARNA, BULGARIA | ||||||
|
SOFIA, BULGARIA | ||||||
|
VIDIN, BULGARIA | ||||||
|
YIGILCA, BULGARIA | ||||||
Rezultatele finale au fost reduse la Sistemul de coordonate EUREF89, sistemul unic de referinta in Europa. Parametri de transformare au fost furnizati de Grupul Tehnic de Lucru al EUREF.Formula utilizata este urmatoarea:
 (3)
(3)
In care:
DX, DY, DZ sunt translatiile bazate pe transformarea globala ITRF92-ITRF89, incluzand si coeficientul de scara;
w w w3 sunt rotatiile din 1992 inapoi la 1989, datorate miscarii platoului European.
Parametri acceptati pentru translatii si rotatii sunt cei definiti de Boucher in 1993:
DX = 3.8 cm, DY = 0 cm, DZ = -3.7 cm
w = 0.21 mas/an, w = 0.52mas/an, w = -0.68 mas/an.
Introducand aceste date in formula (3), se obtin coorodonatele globale teridimensionale in sistem ETRF89 pentru fiecare punct in parte coordonatele finale sunt prezentate in Tabelul 5.
Tabelul 5
|
Denumire punct |
X |
Y |
Z |
|
(m) |
|||
|
CONSTANTA | |||
|
DEALUL PISCULUI | |||
|
MOSNITA | |||
|
OSORHEI | |||
|
SIRCA | |||
|
SFINTU-GHEORGHE | |||
|
STANCULESTI | |||
|
MAKO, HUNGARY | |||
|
PENC, HUNGARY | |||
|
SOPRON, HUNGARY | |||
|
TARPA, HUNGARY | |||
|
TENKES, HUNGARY | |||
|
GABROVO, BULGARIA | |||
|
KAVARNA, BULGARIA | |||
|
SOFIA, BULGARIA | |||
|
VIDIN, BULGARIA | |||
|
YIGILCA, BULGARIA | |||
Reteaua astfel obtinuta indeplineste fara dubii scopul pentru care a fost realizata, respectiv crearea unei retele geodezice de ordinul A in Romania. Preciziile au fost demonstrate, punctele acopera foarte bine teritoriul Romaniei. Trebuie doar tinut cont in viitoarele calcule de miscarile placilor tectonice in timp.
6.2 Reteaua realizata pentru determinarea miscarilor placilor tectonice in Europa Centrala, CERGOP.
Proiectul CERGOP a demarat primele masuratori in mai 1994 si cuprindea zece tari. O data cu aderarea Romaniei la program, numarul tarilor a crescut la 11. Primele masuratori in Romania s-au efectuat din 29 mai pana in 2 iunie 1995. Reteaua CERGOP isi propune realizarea a trei scopuri principale:
realizarea cercetarilor geodinamice in zona Europei Centrale bazate pe masuratori foarte precise in cadrul unei retele unice;
investigatii profunde a profilului tectonic din zona Europei Centrale, zona Teisseyre - Tornquist, bazinul Carpatic si Panonic si influentele lor asupra regiunii Alpo-Adriatice;
furnizarea unui cadru de referinta subregional pentru studiul deformatiilor.
Initial au fost alese doar patru locatii: Tismana, Gilau, Iasi-Repedea si Macin, pe considerente geologice. Din nefericire aceste puncte nu s-au suprapus cu puncte ale retelei geodezice Romanesti datorita neantelegerilor cu Directia Topografica Militara. In urma discutiilor purtate cu partea romana care raspundea de proiect, numarul punctelor a fost suplimentat cu inca patru: Bucuresti, Fundata, Vrancea si Vatra Dornei. Astfel, numarul total de puncte stationate a fost de opt. Din Figurile 3 si 4, se observa tarile participante la proiect (Germania, Polonia, Austria, Cehia, Slovacia, Ungaria, Italia, Croatia, Slovenia, Ucraina si Romania) si dispunerea punctelor determinate. Masuratorile au fost repatate in anii urmatori, datele fiind prelucrate de IfAG, Germania. Timpul de stationare pe fiecare punct a fost de 4 zile. Rezultatele au fost considerate forte bune. Din nefericire doar un punct din cele 8 a rezistat in timp, restul fiind distruse.
In prezent exista doua proiecte finantate de Germania si Olanda, care au ca scop deteminarea miscarilor placilor tectonice. In acest caz, punctele de determinat se suprapun pe puncte ale retelei geodezice nationale, ceea ce le asigura o stabilitate mai mare in timp.
Fig. 3 Statiile retelei GERGOP din regiunea Central Europeana
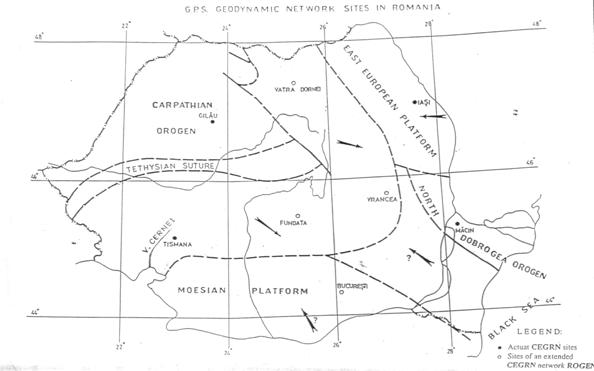
Fig. 4 Statiile retelei GERGOP din Romania
7 Statii permanente EUREF.
Dupa cum se observa din cele spuse mai sus, fiecare tara are deja un numar de puncte cu coordonate bine determinate in sistem EUREF. Aceste puncte ajuta ulterior la indesirea retelei EUREF in fiecare tara. Indesirea se realizeaza cu un anumit numar de receptoare, functie de utilizator.
Statiile permenente au aparut din doua considerente principale:
verificarea permenenta a utilizatorilor;
suplinirea numarului de receptoare.
Statiile permanente sunt niste receptoare GPS amplasate pe puncte cu coorodonate cunoscute si care inregistreaza permenent date de la satelitii vizibili. Aceste date pot fi accesate liber pe Internet sau pot fi cumparate contra cost de la un anumit serviciu. Astfel, daca un utilizator dispune doar de un receptor GPS, acesta este amplasat pe punctul de determinat, statia permanenta devenind statie cu coordonate cunoscute si care determina punctul nou. Se acceseaza datele disponibile comune in timpul masuratorilor de la statia permenenta si astfel se pot calcula coordonatele punctului nou. Desigur, cu cat numarul receptoarelor GPS al unui utilizator este mai mare, cu atat disponibilitatile cresc. Astfel, statia permanenta devine un punct de coordonate cunoscute care poate determina toate celelalte puncte noi, sau poate verifica niste puncte cu coordonate deja cunoscute pe care sunt amplasate receptoare GPS. La capitolul de prelucrare a datelor GPS se va trata pe larg modul practic de utilizare a statiilor permanente.
Statiile permanente pot fi utilizate si pentru controlul coordonatelor utilizatorilor. In acest caz se cer datele brute din receptoarele GPS amplasate pe punctele noi. Se cauta intervalul de timp stationat pe fiecare punct si se descarca din datele statiei permanente intervalele (intervalul) respectiv. Se calculeaza apoi coordonatele fiecarui punct nou si se compara cu datele prezentate.
In Romania exista mai multe statii permanente in acest moment. Cea mai cunoscuta este statia amplasata pe cladirea Facultatii de Geodezie a Universitatii Tehnice de Constructii Bucuresti. Are un site pe Internet care poate fi accesat si care furnizeaza date permanent. Coordonatele statiei sunt determinate in urma corelarii datelor cu statii permanente din Europa, pe o lunga durata de timp.
Agentia Nationala de Cadastru si Publicitate Imobiliara a amplasat in prima faza statii permanente la sediul Agentiilor Judetene de Cadastru si Publicitate Imobiliara in localitatile: Braila, Suceava, Sibiu, Cluj si Timisoara. In faza a doua s-a mai amplasat o statie la Craiova, urmand foarte curand sa fie amplasata o alta la Constanta. In viitorul apropiat se preconizeaza amplasarea a inca doua statii, la Bacau si la Baia Mare sau Satu Mare. Coordonatele acestor statii nu sunt inca disponibile, ANCPI urmand sa perceapa o taxa pentru achizitionarea acestor coordonate.
Desigur, aceste statii nu pot satisface ca numar cerintele utilizatorilor. Receptoarele GPS de clasa geodezica pot utiliza aceste statii permanente chiar daca sunt la distante mai mari de ele. Receptoarele mai putin performante si care nu au decat lungimea de unda L1, daca sunt la distante mai mari de 10 - 20 kilometri de statia permanenta nu pot utiliza datele primite de la aceasta decat dupa o stationare foarte lunga si utilizand programe speciale.
In cadrul programului de urmarire a deplasarilor placilor crustale au fost amplasate un numar de 6 statii permanente de catre Universitatea din Utrecht in colaborare cu Universitatea din Bucuresti, Facultatea de Geologie si Geofizica.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3529
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved