| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
ANALIZA SI SINTEZA DISPOZITIVELOR NUMERICE
PROIECTAREA UNUI CIRCUIT DE COMANDA
PENTRU UN MOTOR PAS CU PAS
A. Date initiale
- tipul motorului: pas cu pas cu patru faze cu reluctanta variabila;
- curentul nominal al motorului: In=150 mA;
- tensiunea de alimentare: Ualim=12 V;
- secventa de comanda: simetrica dubla, simpla si nesimetrica;
- distribuitorul de impulsuri sa fie implementat cu porti logice NAND (si-nu);
B. Continutul proiectului
CAP I - Notiuni generale ale motorului pas cu pas
1.1. Principiul constructiv si de functionare
1.2. Schema bloc de comanda a motorului pas cu pas
CAP II - Alegerea schemei de comanda
2.1. Alegerea schemei generatorului de impulsuri
2.2. Proiectarea schemei distribuitorului de impulsuri
2.3. Alegerea blocului contactoarelor statice
Bibliografie
CAPITOLUL I
NOTIUNI GENERALE ALE
MOTORULUI PAS CU PAS
Principiul constructiv si de functionare
Motorul pas cu pas are o utilizare larga, datorita tendintei de functionare numerica a elementelor din structura sistemelor de comanda si reglare a actionarilor electrice. Aceasta tendinta s-a vadit odata cu aparitia masiva a circuitelor electronice sub forma integrata. Folosirea pe scara larga a motoarelor pas cu pas se explica si prin aparitia structurilor ierarhizate, mari si complexe ce inlocuiesc sistemele clasice, care permit optimizari globale prin folosirea calculatorului,
Dat fiind ca motorul pas cu pas este un element de executie cu functia de convertor electromecanic digital-analog (impuls -unghi) este evidenta intrebuintarea lui in sistemele ele comanda si reglare numerica.
Motorul pas cu pas realizeaza conversia directa a semnalului de intrare, dat sub forma numerica, intr-o miscare unghiulara discontinua sau incrementala. In acest fel miscarea obiectului reglat este cuantizata in deplasari discontinue, in deplina concordanta cu evolutia semnalelor discrete de comanda.
Datorita acestor proprietati motoarele pas cu pas permit realizarea unor sisteme de reglare de tip discret, care prezinta remarcabilul avantaj de a nu avea nevoie de bucle de reactie pentru corectarea miscarii.
Schema bloc de principiu a sistemului de reglare incrementala a pozitiei articulatiei de tip rotatie a unui robot este data in Fig. L
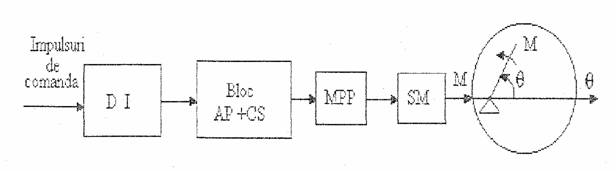
Fig. 1
Miscarea incrementala a acestuia, intr-un sens sau altul, este transmisa, prin intermediul servomecanismului (SM), articulatiei robotului care executa o deplasare incrementala in conformitate cu informatia continuta de catre impulsurile de comanda.
Compatibilitatea motorului pas cu pas cu tehnica numerica de calcul a condus la obtinerea unor performante superioare in procesul de pozitionare, fapt ce a determinat extinderea domeniilor de aplicabilitate a acestora.
O clasificare a motoarelor pas cu pas se poate face in functie de constructia circuitului magnetic si de numarul infasurarilor de comanda. Astfel se disting:
a) motoare pas cu pas de tip reactiv (cu reluctanta variabila) cu rotorul fara infasurari, cu un numar de poli sau dinti ce difera putin fata de cel ai statorului. Acest motor poseda cuplu scazut, unghi de pas mic si viteze mari (de ordinul 20.000 pasi/s);
b) motoare pas cu pas de tip activ, la care apar pe rotor magneti permanenti sau electromagneti. Motoarele pas cu pas pot avea unul sau mai multe statoare cu infasurari de comanda concentrate sau distribuite. Aceste motoare poseda un cuplu ridicat unghi de pas mare si viteze de ordinul a 300 pasi/s.
Pentru exemplificare consideram un motor pas cu pas de tip reactiv sau cu reluctanta variabila cu pr=l pereche de poli rotorici si ps=3 perechi de poli aparenti statorici. Fiecare pol statoric are cate o infasurare concentrata de comanda; toate aceste infasurari se leaga doua cate doua in serie (ale polilor statorici opusi), formand 'fazele' statorice. Se alimenteaza apoi succesiv de la o sursa de curent continuu cu ajutorul unui comutator electronic.
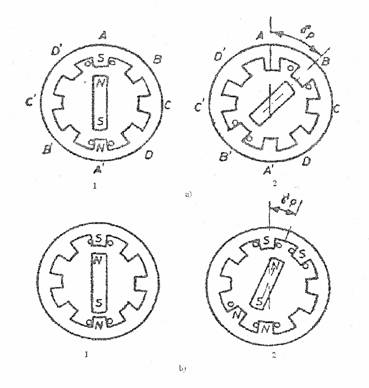
Fig.2
Considerand Fig. 2a, daca se utilizeaza asa-zise secvente simple de alimentare, sa presupunem ca trece curent prin faza AA'; cuplul electromagnetic ce se exercita asupra rotorului il invarteste pana la coincidenta axei sale cu axa fazei AA', Dupa intreruperea alimentarii fazei AA' se trece la alimentarea fazei BB'; rotorul va lua o noua pozitie corespunzatoare axei polilor BB' si se deplaseaza deci cu unghiul geometric.
![]() (1)
(1)
Urmeaza apoi alimentarea fazei CC', din nou AA' s.a.m.d. La fiecare noua alimentare sau comanda rotorul se roteste cu pasul unghiular γp,
Daca se utilizeaza un motor multipolar (pr≠1), sub actiunea fiecarui impuls de alimentare se realizeaza nasul geometric al rotorului
![]() (2)
(2)
Marimea numarului de pasi de la o rotatie completa, deci micsorarea in continuare a pasului γp, se realizeaza prin majorarea numarului de perechi de poli in stator si rotor. Se mai recurge, constructiv, la reunirea in acelasi motor pas cu pas a mai multor ansambluri independente de statoare si rotoare, decalate spatial intre ele.
Unghiuri mici de pas se obtin daca atat statorul cat si rotorul sunt danturati. Numarul de dinti din stator Zs trebuie sa fie diferit de cel din rotor Zr (Zs=Z12) pentru ca circuitul magnetic sa fie nesimetric si deci reluctanta magnetica sa fie maxima dupa o axa si minima dupa alta axa.
In afara de succesiunea de alimentare a fazelor curii s-a aratat mai sus (AA', BB', CC' etc.), denumita secventa simpla se poate utiliza secventa mixta, cand pentru motorul din Fig. 2b se vor realiza ''pasii' de 30. Rotorul se deplaseaza succesiv cu aceste unghiuri in pozitii in care reluctanta circuitului magnetic este minima. Unghiul de pas la secventa mixta de alimentare va fi:
![]()
Unghiul de pas al motoarelor pas cu pas de tip reactiv poate fi de ordinul tractiunilor de grad.
Alimentarea fazelor motorului pas cu pas poate fi. de asemenea, in secventele simpla si mixta. Deosebirea rezida din faptul ca la terminarea unui ciclu fazele se alimenteaza cu polaritatea inversa, corespunzator cu schimbarea polaritatii polilor retorici. Daca pr este numarul de perechi de poli ai rotorului si m numarul de faze statorice, unghiul geometric de pas este. la secventa simpla.
![]() (4)
(4)
Pentru motorul pas cu pas din Fig. 2a, γp=7c/4 rad. In situatia secventei mixte de alimentare (Fig. 2b)
![]() (5)
(5)
1.2. Schema bloc de comanda a motorului pas cu pas
Indiferent de principiul de functionare al unui motor pas cu pas comanda acestuia se realizeaza prin comutarea succesiva a fazelor infasurarilor,
Pentru un motor pas cu pas cu reluctanta variabila sunt posibile urmatoarele tipuri de comenzi:
- comanda simetrica simpla sau cu putere pe jumatate;
- comanda simetrica dubla sau cu putere intreaga;
- comanda nesimetrica sau cu comanda cu jumatate de unghi de pas.
1.2.1. Comanda simetrica simpla
Pentru un motor pas cu pas cu patru faze (m1, m2, m3, m4) aceasta presupune alimentarea pe rand a acestora. Comanda poate fi in sens orar, daca fazele sunt alimentate in succesiunea m1-m2-m3-m4 sau in sens antiorar, daca fazele sunt alimentate in succesiunea m1-m4-m3-m2-m1.
Tabelul de stare pentru cele patra infasurari si diagrama de semnale sunt date de Fig. 3:
|
Sens orar |
Sens antiorar |
||||||
|
m1 |
m2 |
m3 |
m4 |
m1 |
m2 |
m3 |
m4 |
|
|
|||||||
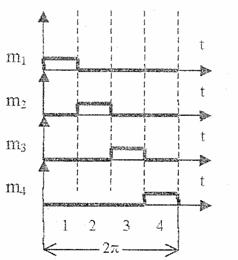
Fig. 3
Pentru acest tip de comanda valoarea pasului electric este:
![]()
![]() (6)
(6)
iar motorul are patru stari electrice,
1.2.2. Comanda simetrica dubla
Aceasta presupune alimentarea celor patru faze ale motorului pas cu pas in succesiunea 12-23-34-41pentru sensul orar al rotorului si in succesiunea 14-43-32- pentru sensul antiorar.
Tabelul de stare pentru cele patru infasurari si diagrama de semnale sunt date in Fig. 4
|
Sens orar |
Sens antiorar |
||||||
|
m1 |
m2 |
m3 |
m4 |
m1 |
m2 |
m3 |
m4 |
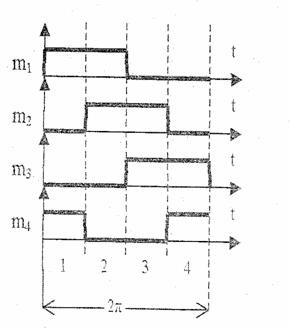
Fig. 4
Pentru aceasta comanda pasul electric are valoarea:
![]() (7)
(7)
iar starile sunt defazate cu n>4 fata de starile electrice de baza.
1.2.3. Comanda nesimetrica
Comanda presupune alimentarea fazelor in secventa 12-2-23-3-34-4-41-1 pentru deplasarea in sens orar a rotorului, iar secventa 14=4-43-3-32-2-21-1.., asigura deplasarea in sens antiorar.
Pentru aceasta comanda rotorul executa o deplasare cu o jumatate de pas, comparativ cu pasul de la comenzile simetrice.
Tabelul de stare pentru aceasta comanda si diagrama de semnale sunt in Fig. 5.
|
Sens orar |
Sens antiorar |
|||||||
|
m1 |
m2 |
m3 |
m4 |
m1 |
m2 |
m3 |
m4 |
|
|
|
| |||||||
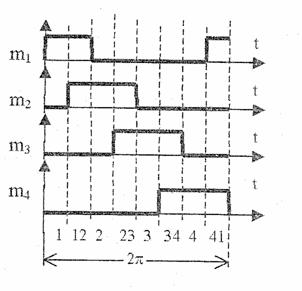
Fig. 5
1.3. Caracteristicile motoarelor pas cu pas
1) Caracteristica unghiulara statica reprezinta dependenta cuplului sincronizant Mj de unghiul 0 format de axa de simetrie a campului magnetic cu axa rotorului. Cuplul este de forma:
![]() (8)
(8)
(Φ0 este fluxul magnetic pe pol al magnetului permanent iar If=const. este curentul de regim stationar din infasurarea de comanda). Caracteristica unghiulara statica este trasata in Fig. 6. Daca motorul pas cu pas de tip reactiv sau cu reluctanta variabila.
![]() (9)
(9)
2) Cuplu sincronizat dinamic Md este cuplul maxim ce poate fi dezvoltat de catre motorul pas cu pas, tara ca el sa iasa din sincronism, la o anumita viteza unghiulara.
3) Caracteristica dinamica a motorului pas cu pas este dependenta Md=f(Ω), pentru θ = const.
4) Cuplurile limita ale motorului pas cu pas arata cat de mari pot fi cuplurile rezistente la arborele motorului in anumite regimuri (permanent, pornire, oprire, reversare), pentru o anumita frecventa de comanda, fara sa se produca pierderea de pasi (iesirea motorului pas cu pas din sincronism). caracterul de masina sincrona a motorului pas cu pas e dat tocmai de dependenta vitezei unghiulare Ω, de numarul de pasi parcursi intr-o secunda, de frecventa impulsurilor de alimentare.
Cuplul critic sau de rasturnare cvasistationar, corespunzator regimului permanent, scade cu cresterea frecventei.
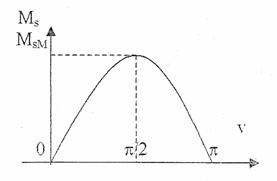
Fig. 6
5) Caracteristica de sarcina limita a motorului pas cu pas (fig. 7) reprezinta dependenta cuplului critic MsM in functie de frecventa. In mod similar se poate defini o frecventa limita de comanda (la care, pentru un cuplu rezistent constant, se mai pastreaza sincronismul).
In regim cinematic de mica viteza, performantele motorului pas cu pas sunt determinate de frecventa impulsurilor de comanda. La sfarsitul pasului, miscarea rotorului este caracterizata de o serie de oscilatii amortizate. Pentru amortizarea acestor oscilatii, cu atat mai pronuntate cu cat pulsatia impulsurilor se apropie mai mult de pulsatia proprie a SAE, se utilizeaza diverse remedii, mecanice, electrice sau electronice. Din acestea mentionam suprapunerea peste impulsurile de comanda a unor impulsuri de secventa tripla sau alimentarea infasurarilor cu curenti de forma sinusoidala, obtinuti de la sisteme cu microprocesoare sau memorii programate, ce joaca rolul unui sintetizor de frecventa.
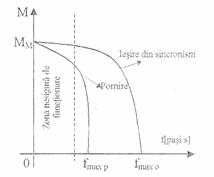
Fig. 7
CAPITOLUL II
ALEGEREA SCHEMEI DE COMANDA
2.1. Consideratii generale
Una din cele mai importanta probleme in aplicatiile cu motoare pas cu pas este cea a sistemului de comanda si a sistemului de alimentare. Referitor la sistemul de comanda, pentru un motor pas cu pas se poate adopta un sistem in circuit deschis sau m circuit inchis.
Proprietatea de conversie univoca a impulsului electric in pas unghiular, specifica motorului pas cu pas. permite realizarea unor sisteme de reglare a pozitiei in circuit deschis iara folosirea unui traductor de reactie , Deoarece nu exista o bucla de reactie, nu exista nici un mijloc de a sti daca motorul a pierdut un impuls sau daca viteza are un caracter prea oscilant.
Daca frecventa impulsurilor de comanda este prea ridicata motorul pierde sincronismul cu impulsurile oprindu-se. deci el poate functiona cu rezultate bune in bucla deschisa doar la frecvente joase si medii, ceea ce constituie o limitare a frecventelor pana la care poate fi folosit si deci un dezavantaj. Un alt dezavantaj al folosirii motorului pas cu pas in bucla deschisa este legat de sensibilitatea deosebita la variatiile sarcinii, care conduce la pierderea pasilor, si deci la iesirea din sincronism.
Aceste dezavantaje au determinat adoptarea sistemelor de comanda in circuit inchis, care confera motorului pas cu pas obtinerea unor performante deosebite referitoare la :
- obtinerea unei viteze superioare de mers;
- o stabilitate mai buna a reglarii in raport cu variatia sarcinii;
- un mers mai linistit tara oscilatii.
Indiferent de sistemul de comanda adoptat, modul de comanda al alimentarii fazelor, impreuna cu schema de alimentare a acestora pot ameliora performantele unei constructii date pentru motorul pas cu pas (unghi de pas, cuplu dinamic maxim, frecventa maxima de mers).
2.2 Comanda in circuit deschis a motorului pas cu pas. Distribuitorul de impulsuri.
Comutarea semnalelor pe infasurari este realizata cu scheme de comanda specifice. Aceste scheme trebuie sa contina pe de o parte logica de comutare a fazelor, iar pe de alta parte dispozitive electronice de putere cuplate direct pe infasurarile motorului.
In fig. 8 se pot urmari principalele elemente ce intra in compunerea acestor scheme.
Circuitul distribuitor este format dintr-un numarator in inel cu numarul starilor egal cu numarul fazelor motorului, urmat de o logica de decodificare ce permite activarea unei singure iesiri intr-o stare a numaratorului. Pentru exemplificare in fig. 9 sunt prezentate doua circuite distribuitoare pentru un motor pas cu pas cu patru faze. Primul distribuitor, fig. 9a este realizat dintr-un numarator modulo 4 activat de un generator de impulsuri cu perioada T=tM 4, unde tM este timpul de explorare al tuturor fazelor motorului.
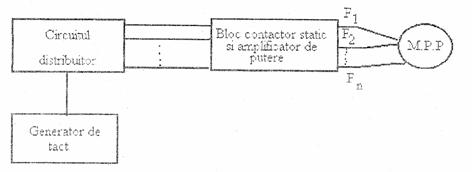
Fig. 8
Prin decodificare se obtine in fiecare stare a numaratorului un singur impuls, la fiecare perioada a generatorului, deci controlul realizat corespunde unei comenzi simetrice simple, in fig. 9b este utilizat acelasi numarator, dar logica de decodificare asigura semnalele urmatoare:
A=Q1
B=Q0Q1+Q0Q1
C=Q1
D=Q0Q1+Q0Q1
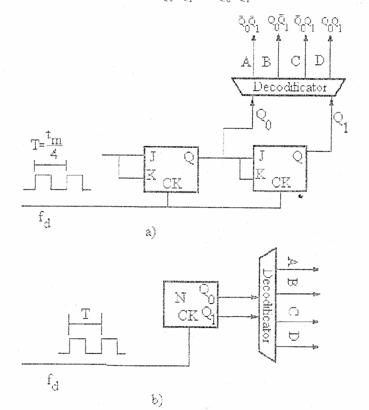
Fig. 9
Prin aceasta selectie se obtine o distributie in timp de forma 4b realizand, deci comenzi simetrice duble.
Circuitele prezentate sintetizeaza functia de baza a distribuitoarelor, repartitia semnalelor pe fiecare faza dupa o secventa impusa, avand ca referinta semnalul unui generator de tact, in afara de acest semnal distribuitorul poate ti controlat printr-o serie de semnale externe ce ii definesc sensul de baleiaj al fazelor, blocarea sau deblocarea sa si permit chiar modalitati functionale specifice corespunzatoare unor regimuri de accelerare sau decelerare a motorului. Frecventa de tact este. la rotatia nominala, a motorului constanta si obtinuta prin circuite oscilatoare de uz gen erai. Pentru regimurile de accelerare se impune, in scopul eliminarii fenomenului! de pierdere a pasilor, pornirea generatorului la frecvente joase si cresterea gradata a frecventei pana se atinge frecventa de regim dorita,
O procedura similara este necesara si la regimurile de decelerare. Aceasta modificare a frecventei poate fi realizata in diferite moduri: prin circuite controleaza miscarea,
In Fig. 10 este prezentat un circuit numeric ce realizeaza controlul frecventei prin informatia numerica transmisa de la procesor. Aceasta marime numerica reprezentata prin vectorul Nv, este inscrisa intr-un registru tampon si este decrementat de un semnal de tact de frecventa ridicata si riguros constanta (Ts) emis de un generator GT1.
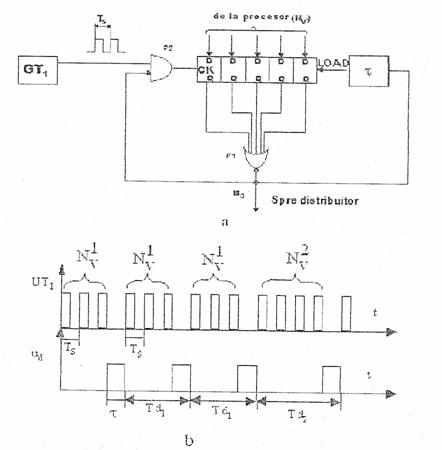
Fig. 10
La atingerea starii de zero a registrului o poarta logica P1 blocheaza accesul acestor impulsuri si permite reinscrierea unei noi valori numerice cu o intarziere t. Iesirea portii reprezinta semnalul de tact al distribuitorului.
Frecventa de control a distribuitorului fd se obtine, din valoarea numerica aplicata, dupa o relatie de forma:
![]() (10)
(10)
Aceasta relatie este pusa in evidenta prin diagrama de semnale din fig.10b
Pentru o valoare Nvl=3 inscrisa periodic in registru se obtin impulsurile ud cu perioada Tdl. Marimea valorii numerice, Nv2=4 determina o crestere proportionala a perioadei la valoarea Td2.
Distribuitoarele de impulsuri genereaza logica de comutare a tensiunii de alimentare pe fiecare faza fara a asigura si puterea necesara pentru comutare.
Aceasta este obtinuta de un bloc de contactoare statice care realizeaza amplificarea necesara sistemului.
2.3. Blocul contactoarelor statice
Blocul contactoarelor statice (driver) realizeaza comutarea fazelor motorului pas cu pas la tensiunea de alimentare in conformitate cu logica stabilita de distribuitorul de impulsuri. Rezulta deci ca blocul contactoarelor statice trebuie sa corespunda unor problemele ce deriva din regimurile speciale la care opereaza un motor pas cu pas. Aceste probleme pot fi formulate prin conditiile urmatoare:
a) curentul sa poata fi stabilit si suprimat dupa o lege elaborata de un dispozitiv auxiliar de comanda, ceea ce impune utilizarea tranzistoarelor de putere in etajele finale. Acestea sunt realizate in configuratii speciale in curent de tipul circuitelor Darlington. Ele au avantajul unui factor de amplificare bun, o impedanta de intrare mare si o impedanta de iesire mica, deci o adaptare foarte buna fata de sarcina oferita de motor. Circuitele Darlington reprezinta in acelasi timp si un excelent comutator static, constantele de timp proprii fiind foarte mici;
b) curentul prin fazele motorului pas cu pas trebuie sa se stabileasca imediat ceea ce impune folosirea unor tehnici pentru diminuarea constantelor de timp care apar;
c) scaderea curentului de la valoarea sa nominala la valoarea zero trebuie sa fie de asemenea suficient de rapida si sa nu produca supratensiuni care risca sa deterioreze tranzistoarele;
d) curentul trebuie sa fie mentinut si controlat la o valoare impusa de dispozitivul de comanda;
e) nici un curent nu trebuie sa circule in infasurarile nealimentate.
Schema unui amplificator comutator de tip Darlington cuplat pe una din infasurarile unui motor pas cu pas este data in fig. 11.
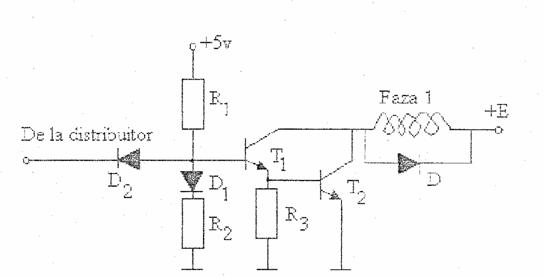
Fig. 11
Daca semnalul furnizat de distribuitor are valoarea logica "1" dioda D2 se blocheaza, tranzistorul T1 intra in saturatie determinand conductia lui T2 si conectarea fazei l la tensiunea de alimentare E. Ca urmare, prin faza l a motorului se stabileste un curent i(t). Pentru un semnal de nivel logic '0' furnizat de distribuitor, tranzistorul T1 se blocheaza determinand blocarea tranzistorului T2 si anuland curentul in faza motorului prin intreruperea alimentarii acestuia.
Dioda D1 asigura protectia distribuitorului fata de tensiunea de alimentare E. a fazei motorului, in caz de scurtcircuit intre baza si colectorul tranzitoriii ui T1.
Dioda D protejeaza tranzistoarele de putere fata de supratensiunile ce apar la blocarea acestora. Rezistentele R2 si R3 servesc la evacuarea sarcinilor stocate in bazele tranzistoarelor T1 si T2, micsorand astfel timpul de blocare.
Acest lucru este necesar mai ales la functionarea la frecvente mari de lucra, in scopul reducerii puterii disipate in comutatie.
2.4 Problema fortarii pantei curentului
Conditiile (b) si (c) se refera la regimul tranzitoriu al curentului de sarcina. Considerand tranzistorul T un comutator ideal cu rezistenta de iesire R0, sarcina acestui comutator este caracterizata prin inductanta Lm si rezistenta Rm a fazei pe care o comuta. Schema echivalenta a unei faze este data in fig. 12.
In plus, miscarea rotorului genereaza o tensiune electromotoare Eb, cu sens invers fata de tensiunea de alimentare E. Parametrii infasurarii se modifica datorita tolerantelor de fabricatie si conditiilor de functionare.
Deoarece aceste motoare sunt destinate a functiona la temperaturi ridicate, in jur de 100C, se accepta o variatie a rezistentei infasurarii cu 2025% cu temperatura.
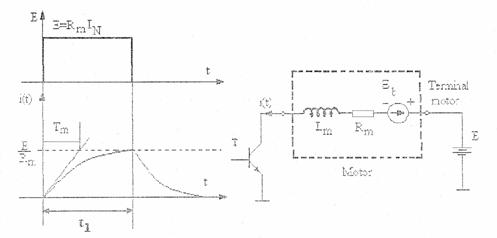
Fig. 12
Curentul care se stabileste prin faza motorului este solutia ecuatiei:
![]() (11)
(11)
si are expresia:
 (12)
(12)
unde:
![]() (13)
(13)
este constanta de timp a circuitului.
Pentru R0=0 (14)
Se obtine:
![]() (15)
(15)
numita constanta de timp a fazei.
Din fig. 12a se observa ca timpul t1 (panta) de stabilire a curentului la valoarea E/Rm se poate aprecia la valoarea t1=3Tm ceea ce corespunde unei frecvente maxime teoretice de raspuns a motorului de valoarea
![]() (16)
(16)
Valoarea lui t1 (si implicit a lui fmax) nu satisface intotdeauna cerintele de comutare ale fazelor motorului, datorita valorii mari a impedantei Lm si valorilor mici ale rezistentelor Rm si R0. Rezulta deci ca blocul contactoarelor statice trebuie sa asigure si fortarea pantei curentului prin fazele motorului. Se pot mentiona urmatoarele tehnici de fortare a curentului:
- fortarea prin rezistenta serie;
- fortarea prin rezistenta si condensator;
- fortarea prin tensiune,
2.5. Problema supresarii
Cand tranzistorul T din figura 12b, trece in starea de blocare, infasurarea este deconectata de la sursa de alimentare si energia inmagazinata in ea va tinde sa mentina curentul in circuit.
Cand urmatoarea faza a motorului este conectata la tensiunea de alimentare, scaderea curentului in faza tocmai deconectata are un efect de franare asupra raspunsului motorului. In plus, deconectarea infasurarii de la tensiunea de alimentare determina, datorita inductivitatii aparitia unei tensiuni tranzitorii, proportionala cu (-Lm)di/dt. Aceasta tensiune se insumeaza cu tensiunea de alimentare, existand pericolul deteriorarii tranzistorului T, prin depasirea valorii limita UCEmax.
In consecinta, se pune problema disiparii energiei acumulate in infasurarea motorului intr-un singur circuit sau transmiterea ei inapoi sursei de alimentare. Aceasta problema este cunoscuta sub numele de supresare si are ca efect o scadere rapida a curentului prin fazele deconectate ale unui motor pas cu pas.
Scaderea rapida a curentului prin fazele deconectate ale unui motor pas cu pas este foarte importanta mai ales la viteze mari, cand la o noua reconectare a fazei, curentul prin ea trebuie sa fie nul,
Exista mai multe metode de supresare si anume:
- supresare cu dioda;
- supresare cu dioda si rezistenta;
- supresare cu dioda Zener.
2.6 Conectarea distribuitorului de impulsuri la blocul contactoarelor statice
Semnalele de la iesirea distribuitorului de impulsuri sunt transmise la terminalele de intrare ale driverului, prin care se comanda conectarea/ deconectarea infasurarilor motorului la/de sursa de alimentare. Cel mai simplu mod de conectare directa, asa cum arata fig. 13 a si b.
Dar daca curentii de la iesirea distribuitorului nu sunt suficienti pentru comanda tranzistoarelor driver-ului, este necesar sa se conecteze un etaj intermediar intre distribuitor si driver, pentru amplificarea curentului asa cum se arata in figura 13 c si d.
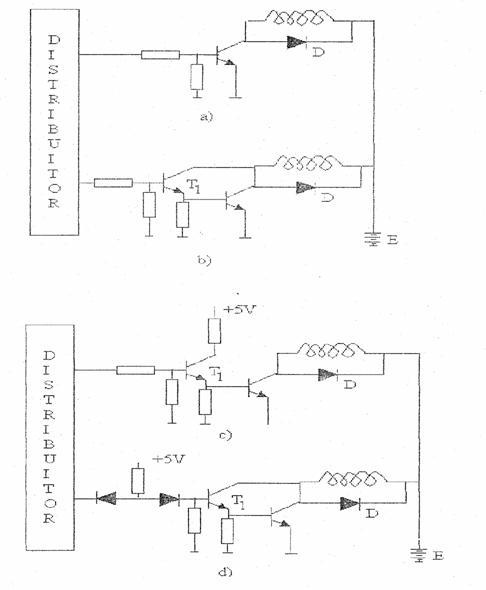
Fig. 13
Bibliografie
1. Alexandru Fransua, Razvan Magureanu, Masini si actionari electrice. Elemente de executie, Edituta Tehnica, 1986, pag. 513
2. Gheorghe Tunsoiu, Emanuel Serain, C. Saal, Actionari electrice, Edituta Didactica si Pedagogica, Bucuresti, 1982
3. Horia Gavrila, Electrotehnica si echipamente electrice, vol. II, Editura Didactica si Pedagogica, Bucuresti, 1994, pag. 316
4. Mircea Ivanescu, Roboti industriali, Editura Universitaria, Craiova, 1994
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 1829
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved