| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Elemente de executie utilizate in
sistemele de reglare automata
Cuprins
Argument
Cap. 1. Caracterizare generala S.R.A
1.1.Clasificarea S.R.A
1.2. Schema bloc a unui sistem de reglarea automata
Capitolul 2 Elemente de executie
Clasificarea elementelor de executie
2.2. Schema bloc a unui element de executie EE
2.3. Elemente de actionare
2.3.1. Actionarea electrica
2.3.2. Elemente de actionare pneumatice (servomotoarele pneumatice)
2.3.3. Organe de reglare.
2.3.4.Organe de executie
Cap. 3. Norme de protectia muncii
Bibliografie
Argument
Automatica cuprinde totalitatea metodelor si a mijloacelor tehnice prin care se stabilesc legaturi corespunzatoare intre instalatiile tehnologice si dispozitive anume introduse, astfel incat conducerea proceselor de productie sa se desfasoare fara interventia directa a omului.
Principalele avantaje ale automatizarii constau in:
cresterea productivitatii muncii;
imbunatatirea calitatii muncii;
reducerea efortului intelectual depus de oameni in cadrul procesului de productie.
In structura oricarei instalatii automatizate se disting:
instalatia tehnologica;
dispozitivul de automatizare;
Automatizarea proceselor de productie se realizeaza prin sisteme automate, formate din elemente componente, care se realizeaza in schemele functionale, simbolizate printr-un dreptunghi.
Fiecare astfel de element cumuleaza urmatoarele proprietati:
- reprezinta o unitate fenomenologica sau functionala bine definita si relativ simpla, ca de exemplu un motor sau transformator electric, o pompa sau un ventilator, o termorezistenta sau un tahogenerator, un robinet sau o clapeta de gaze, un cuadripol electric sau un bloc electronic;
- poseda cel putin un semnal de intrare si unul de iesire (elementul de comparatie are cel putin doua semnale de intrare si un semnal de iesire), ca de exemplu: tensiuni electrice, forte, temperaturi, presiuni, concentratii chimice, deplasari rectilinii sau unghiulare;
- transferul semnalelor este unidirectional, intodeauna de la intrare spre iesire. La un termocuplu, de exemplu, semnalul de intrare este temperatura (in grade c), iar cel de la iesire este tensiunea (in mV) si nu invers;
- semnalul de iesire depinde numai de semnalul de intrare si de structura elementului. Aceasta dependenta se exprima, de obicei, fie pe cale analitica (ecuatii diferentiale sau algebrice), fie grafoanalitica(curbe, diagrame).
Cap. 1. Caracterizare generala S.R.A
1.1.Clasificarea S.R.A.
Clasificarea SRA se face in raport cu unele criterii:
a) In raport cu principiul de functionare
- SA conventionale sisteme de urmarire, pentru care i prezinta o comportare intamplatoare (deci necunoscuta in raport cu timpul).
- SA specializate, care asigura, pe langa conditia a = 0 sau alte conditii mai severe de incadrare a functionarii, in anumiti indicatori de performanta impusi. In categorie se grupeaza SA adaptive, optimale sau extremale.
b) In raport cu variatia in timp a lui i(t), sistemele de reglare automata se impart in:
SRA de stabilizare, daca i(t) = constant, ca de exemplu in cazul mentinerii constante a nivelului de lichid dintr-un rezervor, a turatiei unui motor electric a tensiunii la borne unui generator.
- SRA cu program variabil, daca i(t) variaza dupa o lege prestabilita, ca de exemplu temperatura intr-un cuptor electric,puterea activa a unui grup electrogen.
- SRA de urmarire, daca i(t) prezinta o evolutie in timp necunoscuta aprioric, ca de, care asigura anularea, sau tinand sa anuleze abaterea de reglaj a =i-r (unde i se considera semnalul de intrare si r se considera semanlul de reactie). In aceasta categorie se includ si sistemele de reglare automata, pentru care i prezinta o comportare predeterminata ( deci cunoscuta in raport cu timpul )si exemplu urmarirea unei tinte mobile, sau urmarirea unei concentratii chimice, functie de o perturbatie intamplatoare.
c) In raport cu marimea inertiilor instalatiei tehnologice, Sa se pot grupa:
- SA pentru procese lente, avand constantele de timp sub 10 s, ca de exemplu instalatiile chimice, termoenergetice.
- SA pentru procese rapide, avand constantele de timp sub 10 s, ca de exemplu actionarile electrice, reglarea tensiunii generatoarelor electrice.
d) In raport cu numarul semnalelor de intrare si de iesire se deosebesc:
- SA monovariabile, avand un singur semnal de intrare si de iesire;
- SA multivariabile, avand mai multe semnale de intrare si de iesire.
e) In raport cu numarul circuitelor de reactie (de obicei negativa), se pot grupa in:
- SA cu un singur circuit de reactie;
- SA cu mai multe circuite de reactie, care pot fi incrucisate sau neancrucisate.
f) In raport cu comportarea liniara sau neliniara a elementelor componente, se pot clasifica in:
- SA liniare, avand toate elementele componente liniare. Un element liniar respecta principiul superpozitiei efectelor, iar dependenta semnalului de iesire fata de intrare se defineste prin ecuatii diferentiale liniare cu coeficienti constanti. Daca acesti coeficenti depind si de timp, elementul se considera tot liniar, dar variant in timp;
- SA neliniare, contin cel putin un element neliniar. Un element neliniar nu respecta principiul superpozitiei efectelor. Deoarece elementele neliniare prezinta o mare diversitate, ele se considera a fi definitiv altfel decat prin ecuatii diferentiale liniare, cu coeficenti,sau variabili in raport cu timpul.
g) In raport cu forma de variatie in timp a semnalelor, din componenta sistemului, deosebim:
SA cu semnale continue;
- SA cu semnale discontinue, de obicei sub forma unor impulsuri, modulate in amplitudine, durata, frecventa pozitie.
- SA cu semnale sinusoidale, modulate in amplitudine, frecventa, faza.
1.2. Schema bloc a unui sistem de reglarea automata
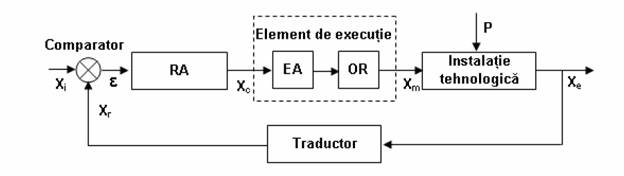
Prin Sistem de Reglare Automata (SRA) se intelege un sistem realizat astfel incat intre marimea de iesire si marimea de intrare se realizeaza automat, fara interventia omului, o relatie functionala care reflecta legea de conducere a unui proces.
Elementul de comparatie (EC) are rolul de a compara permanent marimea de iesire a instalatiei tehnologice cu o marime de acelasi fel cu valoare prescrisa (considerata constanta), rezultatul comparatiei fiind semnalul de eroare ε.
Regulatorul automat (RA) are rolul de a efectua anumite operatii asupra marimii ε primita la intrare, respectiv are rolul de a prelucra aceasta marime dupa o anumita lege, numita lege de reglare, rezultatul fiind marimea Xc aplicata ca marime de comanda elementului de executie.
Elementul de executie (EE) are rolul de a interveni in functionarea instalatiei tehnologice pentru corectarea parametrilor reglati conform marimii de comanda transmise de RA.
Instalatia tehnologica (IT) este in cazul general un sistem supus unor actiuni externe numite perturbatii si actiunii comenzii generate de RA a carui marime de iesire este astfel reglata conform unui program prescris.
Traductorul (Tr) este instalat pe bucla de reactie negativa are rolul de a transforma marimea de iesire a IT de regula intr-un semnal electric aplicat EC.
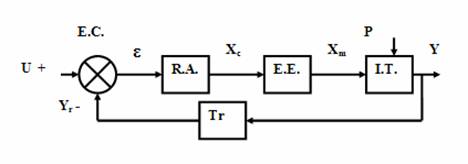
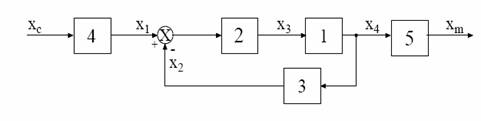
Fig. 1 Modelul structural al unui sistem de reglare automata (SRA)
Elementele componente ale schemei unui SRA:
E.C. - element de comparatie;
R.A. - regulator automat;
E.E. - element de executie;
I.T. - instalatie tehnologica;
Tr - traductor
Marimi care intervin in schema de elemente a unui SRA:
U marime de intrare a sistemului;
- semnalul de eroare;
Yr - marime de reactie;
Xc - marimea de iesire a regulatorului automat;
Xm- marime de intrare a instalatiei tehnologice;
Y marime de iesire a sistemului (a instalatiei tehnologice);
P perturbari.
Capitolul 2 Elemente de executie
Elementele de executie sunt componente ale sistemelor automate care primesc la intrare semnale de mica putere de la blocul de conducere si furnizeaza marimi de iesire, in marea majoritate a cazurilor, de natura mecanica (forte, cupluri) capabile sa modifice starea procesului in conformitate cu algoritmul de conducere stabilit.
Avand un dublu rol, informational si de vehiculare a unor puteri importante, elementele de executie au o structura complexa, reprezentand subsisteme in cadrul sistemelor automate. In general, elementul de executie este format din doua parti distincte: motorul de executie motor electric (ME) (numit si servomotor) si organul de executie (OE)
Relatia care se stabileste intre marimile m de la iesirea elementului de executie (EE) (marimea de executie) si c marimea de intrare a EE (provenita de la regulator) defineste comportarea EE in regim stationar. Raportul dintre aceste marimi, pentru orice valoare a lui c, ar fi ideal sa fie constant, dar intervin in cursul functionarii EE anumiti factori care influenteaza marimea m (frecari, reactii ale mediului ambiant, greutati neechilibrate etc.).
Exista cazuri cand trecerea de la regulator la EE trebuie adaptata, folosind un convertor care transforma marimea de comanda, de exemplu din electrica in hidraulica, daca intrarea in EE trebuie sa fie hidraulica.
EE poate actiona asupra modificarii de energie in doua moduri:
Continuu, daca marimea m poate lua orice valoare cuprinsa intre doua valori limita;
Discontinuu, daca marimea m poate fi modificata numai pentru doua valori limita (dintre care cea inferioara este in general zero).
Daca interventia asupra organului de executie se realizeaza manual, partea motoare ME nu mai este necesara.
2.1. Clasificarea elementelor de executie
Dupa natura sursei de energie folosite pentru alimentarea partii motoare, elementele de executie se pot clasifica in:
Electrice;
Hidraulice;
Pneumatice.
Prezentam in sinteza o clasificare a elementelor de executie.
|
Motor de executie |
Electric |
Motor rotativ |
De curent alternativ |
|
De current continuu |
|||
|
Solenoid |
|||
|
Pneumatic sau Hidraulic |
Cu membrana |
||
|
Cu piston |
Cu 2 fete active |
||
|
Cu o fata activa |
|||
|
Cu distribuitor |
|||
|
Mixt |
|||
|
Organ de executie |
Electric |
Reostat |
|
|
Intrerupator |
De joasa tensiune |
||
|
De inalta tensiune |
|||
|
Neelectric |
Robinet |
Cu dubla actiune |
|
|
Cu simpla actiune |
|||
|
Vana |
Clapeta |
||
|
Plana (fluture) |
|||
Tab. 2.1. Clasificare elemente de executie
2.2. Schema bloc a unui element de executie EE
Structura unui element de executie rezulta din figura 2.1 si se compune din doua parti: elementul de actionare si organul de reglare.
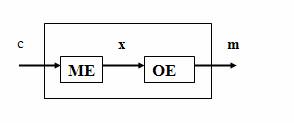
Fig.2.1. Schema bloc a unui element de executie EE
Elementul de actionare are rolul de a transforma semnalul de comanda, primit de regulator intr-un cuplu de forta cu care actioneaza asupra organului de reglare.
Pentru generarea cuplurilor sau fortelor sunt necesare surse de energie exterioare.
Organul de reglare este elementul care intervine in instalatia tehnologica, modificand sub actiunea fortei sau cuplului generat de servomotor, cantitatile de material sau energie necesare procesului. Marimea de iesire a organului de reglare este, de regula, sub forma unei deplasari liniare sau unghiulare.
2.3. Elemente de actionare
2.3.1. Actionarea electrica
Actionarea electrica a organelor de executie se realizeaza cu electromagneti sau cu motoare electrice de curent continuu sau de curent alternativ.
Folosind electromagneti, se obtine o actionare discontinua, bipozitionala, intrucat se pot obtine la iesire doua pozitii stationare (inchis-deschis, dreapta-stanga); trecerea de la o stare la alta se face intr-un timp scurt.
In multe procese tehnologice cu reglare automata, pentru variatia marimii de actionare (de exemplu, pentru reglarea temperaturii, debitului, presiunii etc.) trebuie modificata pozitia elementelor de reglare ale organului de executie (vanelor, supapelor, cursoarelor etc.), care determina valoarea fluxului de energie condus spre obiectul reglarii. Aceasta comanda se poate realiza si cu motoare electrice.
Pentru organele de executie de putere mica se folosesc in general motoare bifazate (asincrone) cu rotorul in scurtcircuit, iar pentru organe de executie de puteri mari, motoare trifazate cu rotorul in scurtcircuit.
Se construiesc servomotoare asincrone in urmatoarele variante: cu o singura rotatie, cu mai multe rotatii sau cu o cursa rectilinie. Cele cu mai multe rotatii, la care cursa completa a elementului de reglare corespunde cu cateva rotatii ale arborelui de iesire, se folosesc mai frecvent pentru actionarea robinetelor sau a supapelor regulatoare.
La servomotoarele cu miscare rectilinie, arborele de iesire este inlocuit printr-o tija, a carei cursa completa corespunde cu cursa completa a elementului de reglare. Parametrii principali, in functie de care se aleg elementele, sunt: cuplul de rotatie la arborele de iesire sau forta la dispozitivul cu cursa rectilinie si durata unei rotatii complete a arborelui de iesire sau a unei curse complete a tijei.
Actionarile electrice cu motoare se impart in doua grupe:
Cu viteza constanta;
Cu viteza variabila.
Pentru comanda motoarelor bifazate si trifazate asincrone se folosesc bobine de reactanta cu saturatie (amplificatoare magnetice).
Din punct de vedere constructiv, partea motoare a elementului de executie este construita din doua subansambluri independente:
Amplificatorul de executie;
Motorul de executie.
In cazul motoarelor de curent continuu, comanda se poate face in doua moduri:
Variind curentul de excitatie si mentinand constant curentul din indusul motorului;
Variind curentul din indusul motorului si mentinand constant curentul de excitatie.
In general, in SRA se intrebuinteaza metoda a doua, pentru ca pierderile de energie sunt mai mici. Aceste motoare sunt folosite mai ales in SRA in care parametrul legat este turatia sau un cuplu.
Avantajele utilizarii servomotoarelor de c.c. decurg din cerintele de functionare ale acestora:
Posibilitatea de reglaj in limite largi;
Stabilitate a vitezei;
Putere de comanda mica;
Cuplu de pornire si viteza de raspuns mare.
Dezavantajul folosirii motoarelor de c.c. il constituie aparitia scanteilor la colector in timpul comutatiei, facandu-l nefolosibil in medii inflamabile sau explozive, precum si producerea de perturbatii radiofonice.
Elementele de actionare electrice, numite si servomotoare electrice, sunt intalnite sub forma de motoare electrice (elemente continue, liniare) si electro-magneti(elemente continue, neliniare).
Dintre motoarele electrice, cele mai utilizate in sistemele de automatizare sunt urmatoarele:
- motoarele de curent alternativ, monofazate, bifazate si trifazate(toate motoarele asincrone cu rotorul in scurtcircuit). Acestea transmit prin intermediul unor reductoare de turatie o miscare de rotatie sau translatie elementelor mecanice de reglare. Practic, servomotoarele sunt ansambluri formate din motoare, reductoare si elemente de transformare a miscarii de rotatie in miscare de translatie;
- motoarele de curent continuu, cele mai utilizate fiind cele cu excitatie separate.
Electromagnetii sunt utilizati in reglari bipozitionale si sunt asociati frecvent robinetelor de reglare.
2.3.2. Elemente de actionare pneumatice (servomotoarele pneumatice)
Elementele de executie pneumatice cu membrana transforma energia potentiala a aerului sub presiune in energia mecanica la deplasarea liniara a unui organ de executie cu care se face interventia in procesul automat.
Alimentarea elementelor de executie pneumatice se face cu energie de la regulatoarele pneumatice (0.2 1 bar), sau electronice, prin intermediul convertorului electro-pneumatic.
Motoarele de executie pneumatice se folosesc foarte mult pentru ca prezinta urmatoarele avantaje:
Fluidul folosit (aerul) nu prezinta pericol de incendiu;
Dupa utilizare, aerul este evacuat in atmosfera, nefiind necesare conducte de intoarcere ca la cele hidraulice;
Pierderile de aer in anumite limite, datorate neetansietatii, nu produc deranjamente;
Sunt simple, robuste, sigure in functionare si necesita cheltuieli de intretinere reduse.
Dezavantajele acestor motoare sunt urmatoarele:
Viteza de raspuns este mica (in medie 1/3 - 1/4 din viteza de raspuns a motoarelor hidraulice);
Precizia motoarelor pneumatice este redusa.
Se recomanda folosirea servomotoarelor pneumatice in urmatoarele cazuri:
Servomotorul are greutate redusa;
Temperatura mediului ambiant este ridicata si cu variatii mari;
Mediul ambiant este exploziv;
Nu se cere precizie mare;
Nu se cer viteze de lucru mari.
Motoarele pneumatice pot fi liniare sau rotative. Cele liniare se pot realiza cu piston sau cu membrana.
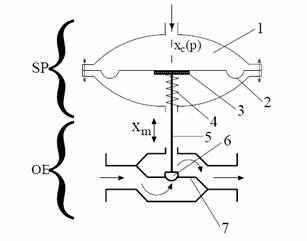
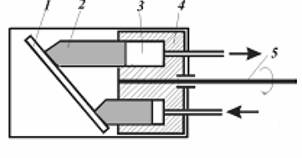
In structura sa complexa, un element de executie pneumatic se compune
din (vezi figura 2.2) :
- 1 - servomotor pneumatic;
- 2 - amplificator pneumatic;
- 3 - traductor de pozitie;
- 4 - element sensibil;
- 5 - organ de executie.
|
|
|
Figura 2.2 Structura unui element de executie pneumatic |
Dintre aceste elemente, amplificatorul de putere, elementul sensibil si traductorul de pozitie, care sunt atasate servomotului pneumatic, formeaza pozitionerul.Pentru a fi studiata comportarea elementului de executie in ansamblul sistemului de reglare, este necesar sa se stabileasca relatia ce leaga marimea Xm
de marimea Xc (pentru elementul de executie pneumatic cu membrana, Xc este o presiune).
Elementele de actionare pneumatice se construiesc in doua variante: cu membrana si cu piston.
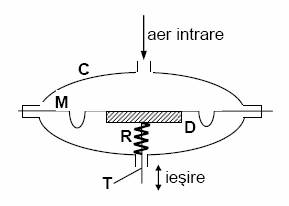
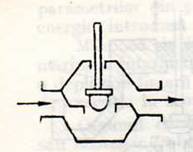
Elementele de actionare pneumatice cu membrana sunt formate dintr-o capsula manometrica C prevazuta cu o membrana M situate deasupra unui disc metalic D solidar cu o tija T si unui resort antagonist R.
|
|
C -capsula M - membrana D - disc metalic T - tija R - resort antagonist |
|
Fig 2.3. Elementele de actionare pneumatice cu membrana |
Aerul comprimat adus de la regulator sau convertor la presiunea 0,2 si 1daN/cm2,apasa asupra membranei invingand rezistenta resortului antagonist si apasand tija in jos.
In functie de presiunea aerului comprimat , pozitia tijei variaza continuu intre doua limite.
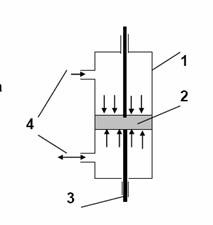
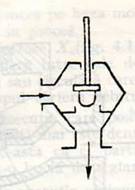
Elementele de actionare pneumatice cu membrana si resort
|
|
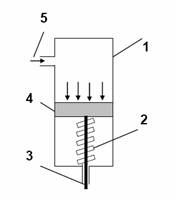
Organul component cel mai important este servomotorul pneumatic (SP) cu membrana, format din : camera (1), membrana elastica (2), discul metalic de rigidizare (3), arcul (4) tija (5). |
|
In figura 2.4., este reprezentat schematic un element de executie pneumatic cu membrana si resort |
Dupa cum aerul sub presiune poate sa actioneze pe o singura fata sau pe ambele fete ale membranei elastice, deosebim elemente de executie proportionale sau integrale.
La cresterea presiunii de comanda (pc) va creste presiunea in camera (1), dar in acelasi timp are loc si o variatie de volum a acestei incinte dupa o relatie de forma :

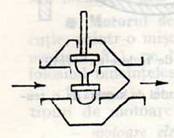
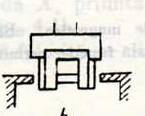
Elementele de actionare pneumatice cu piston
Atunci cand este necesara o forta mare de actionare a organului de reglare, deci cand sunt necesare deplasari mai mari ale tijei, se folosesc elementele cu piston.
Elementele cu piston pot fi executate in doua variante si anume cu o fata a pistonului activa (fig.2.5.a )si cu ambele fete ale pistonului active (fig.2.5.b).
|
|
|
|
fig.2.5.a Elementele cu piston cu o fata a pistonului activa |
fig.2.5.b Elementele cu piston cu ambele fete ale pistonului active |
|
Corp element de actionare; Resort; Tija de actionare; Piston ; Orificiu intrare aer. |
Corp element de actionare; Piston ; Tija de actionare; Orificiu intrare aer |
La cel cu o fata activa, pozitia tijei depinde de presiunea aerului comprimat, deplasarea inapoi a tijei facandu-se prin scoaterea aerului din cilindru,in timp ce la cel cu doua fete active,pozitia tijei depinde de diferenta de presiune aplicata celor doua fete ale pistonului.
Elementele de actionare hidraulica
Folosesc ca agent motor lichide sub presiune,de obicei uleiuri minerale si sunt utilizate cand sunt necesare forte si viteze mari.
Actionarile hidraulice au fost primele mecanisme din tehnica reglarii automate destinate reglarii proceselor, prin dezvoltarea sistemelor electrice de reglare, folosirea elementelor hidraulice a scazut datorita neajunsurilor elementelor hidraulice (lipsa posibilitatii de comanda la distanta, necesitatea etansarii ingrijite a corpurilor si conductelor, dependenta caracteristicilor de variatiile de temperatura ale mediului ambiant si necesitatea unei surse hidraulice).
In ultimul timp, elementele hidraulice cunosc o larga raspandire, intrucat prezinta unele avantaje fata de cele electrice, de exemplu: banda mare de trecere (frecvente ridicate de lucru), raport putere/gabarit maxim, lipsa in majoritatea cazurilor a unui reductor de iesire si varietatea mare a formelor de miscare a axului de iesire (rotativ, oscilant, liniar).
Caracteristicile statice principale ale elementelor de actionare hidraulice sunt caracterizate de viteza si de forta care determina viteza de iesire si forta dezvoltata de motorul de executie in functie de elementul de comanda. Folosind presiuni inalte se pot comanda EE pana la 200m, fara pierderi importante de presiune.
Deosebit de eficienta este hidraulica atunci cand trebuie actionate, in acelasi timp, mai multe EE (de exemplu: macazurile folosite in transporturi etc.).
In instalatiile de automatizare se folosesc, in majoritatea cazurilor, motoare hidraulice cu piston, care pot fi:
o Cu miscare liniara;
o Cu miscare de rotatie (limitata la un unghi de 1800).
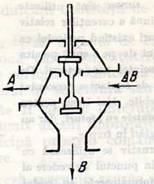
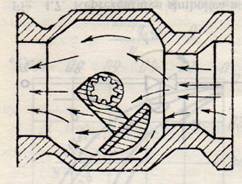
Elementele de actionare hidraulica se construiesc in trei variante,si anume:cu piston,cu membrana si cu organe rotative. Primele doua tipuri se realizeaza in constructie cu cilindru fix sau cu piston fix si sunt asemanatoare celor pneumatice, iar cele cu organe rotative cele mai utilizate sunt de tipul biela-manivela sau de tipul cu paleta rotativa.
Servomotorul cu paleta rotativa determina o miscare de rotatie a axului de iesire pe care este montata paleta, sub influenta presiunii lichidului asupra suprafetei paletei.
Avantajele elementelor hidraulice fata de cele pneumatice constau in posibilitatea utilizarii lor in medii explozive sau inflamabile, precum si in faptul ca dezvolta o forta de actionare mai mare si actioneaza mai rapid datorita incompresibilitatii uleiului.
In schimb, ambele sisteme(hidraulice si pneumatice) necesita instalatii speciale de producere si conservare a uleiului sub presiune si aerului comprimat,ceea ce reprezinta un dezavantaj fata de cele electrice.Datorita acestor considerente,au aparut elemente de actionare mixte (electrohidraulice,hidropneumatice,etc)care imbina avantajele fiecarui sistem.
|
|
1 - disc fix 2- piston axial 3 - corp cilindru 4- bloc cilindru 5 - ax |
|
Element de executie hidraulic |
2.3.3. Organe de reglare.
Desi in practica industriala se utilizeaza o varietate foarte mare de organe de reglare,acestea pot fi impartite in doua mari categorii:
1. Organe de reglare mecanice, care -la randul lor- pot fi grupate in urmatoarele categorii:
a.robinete cu ventil, robinete cu palete (reglarea debitelor la fluide);
b.aparate de carma la nave sau avioane (reglarea directiei);
c.alimentatoare cu banda sau cu surub melcat(reglarea cantitatii de material solid).
2. Organe de reglare electrice (reostatele,autotransformatoarele,contactoarele,amplificatoarele unghiulare etc).
Organul de reglare este elementul care intervine in instalatia tehnologica, modificand sub actiunea fortei sau cuplului generat de servomotor , cantitatile de material sau energie necesare procesului.
Marimea de iesire a organului de reglare este, de regula, sub forma unei deplasari liniare sau unghiulare.
2.3.4.Organe de executie
Dupa cum s-a aratat,organele de executie sunt destinate fie modificarii unor curenti sau tensiuni electrice(organe de executie electrice), fie modificarii unor debite de substanta (organe de executie mecanice).
In prima categorie se incadreaza acele elemente electrice manevrabile,care sunt de exemplu:intrerupatoarele, reostatele ,contactoarele etc; care permit o varietate continua sau discontinua a unor marimi electrice active: tensiune, curent electric,faza, etc.
In cea de a doua categorie se incadreaza diverse elemente mecanice,cum sunt robinetele si dozatoarele ,capabile sa permita trecerea substantei sub cele trei forme de agregare:gazoasa, lichida si solida(granule).
Organe de executie(reglare) electrice
Organele de executie electrice sunt in fond aparate electrice de comutatie, atunci cand reglarea se face discontinuu sau aparate electrice de tipul reostatelor, a autotransformatoarelor sau amplificatoarelor magnetice in cazurile cand este necesar sa se efectueze o reglare continua.
Contactoarele sunt intrerupatoare la care elementul de actionare este de tipul cu electromagnet si ele servesc pentru conectarea, respectiv deconectarea alimentarii cu energie electrica.Au deci cracteristici discontinue,bipozitionale,servomotorul fiind de acelasi tip.
Reostatele cu cursor sunt utilizate pentru reglarea continua a curentilor relativ redusi , la curenti mari existand pericolul ca la trecerea curentului de pe o spira pe alta sa se ditruga prin scantei conductorul. De asemenea, rezistenta de contact a cursorului pune probleme deosebite Mai bune pentru curenti mari sunt reostatele cu ploturi, dar au dezavantajul unei reglari in trepte.
In curent alternativ se utilizeaza cu rezultate bune (si din punctul de vedere al pierderilor autotransformatoarele cu reglaj continuu cu cursor sau cu reglaj discontinuu cu ploturi).
Amplificatoarele magnetice, utilizate mai rar petru aceasta functie, permit o variatie continua a curentului de sarcina la o tensiune constanta.
Organe de executie (reglare) mecanice
Principalele organe de reglare folosite pentru modificarea debitelor de fluid sunt ventilele si clapetele. Uzual, acestea se mai numesc robinete de reglare (cu ventil sau cu clapeta).
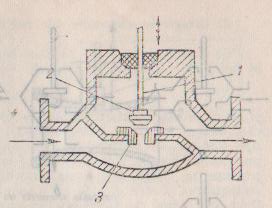
a. Robinete de reglare cu ventil
In cazul utilizarii unui ventil simplu,modificarea debitului de fluid se realizeaza prin modificarea sectiunii de trecere a fluidului.Aceasta se realizeaza prin deplasarea tijei 1 de catre servomotorul pneumatic. In acest fel se produce o modificare a pozitiei supapei 2 fata de scaunul supapei 3.
|
|
1 . tija 2. supapa 3. scaunul supapei |
|
Fig. Robinet de reglare cu ventil |
In ceea ce priveste clasificarea robinetelor cu ventil,aceasta se face in general dupa criterii constructive si anume dupa forma corpului, dupa numarul de scaune sau dupa forma obturatorului(supapei).
Dupa forma corpului se deosebesc robinete normale (cu intrarea pe acelasi ax cu iesirea), robinte de colt - (intrarea si iesirea cu axele perpendiculare), sau robinete cu trei cai pentru divizare -sau pentru amestec.
Dupa numarul de scaune(supape) exista ventile cu unu sau cu doua scaune.
Din punctul de vedere al supapei se desosebesc robinete cu supapa cilindrica
- conica;
-cu ferestre dreptunghiulare;
sau triunghiulare
Variante constructive ale robinetelor cu ventile
|
|
|
|
a. Normal |
b. De colt |
|
|
|
|
c. Cu doua scaune |
d. De divizare |
|
|
|
|
e. Cu supapa cilindrica |
f. Cu supapa conica |
|
| |
|
g. Cu ferestre dreptunghiulare | |
b. Robinete de reglare cu clapeta
Clapetele de reglare
sunt destinate reglarii debitelor de fluide (de obicei gaze) ce curg prin
conducte avand sectiuni mari (peste
Variatia debitului de fluid se relizeaza prin rotirea clapetei (de forma unui disc) cu un anumit unghi determinat, fata de directia curentului in miscare.
Rezulta o anumita starangulare a sectiunii de trecere, respective un anumit debit de fluid asociat acesteia. Clapeta nu se roteste pana la unghiul maxim de 90 , ci numai pana la α=70 , intru - cat in plaja 70-90 apar vibratii mecanice nedorite in procesul de reglare. Clapetele sunt in general actionate de servomotoare cu piston.
|
| |
|
Robinet de reglare cu clapeta |
c. Alte tipuri de robinete de reglare
Exista o serie de factori care dicteaza confectionarea unor robinete de reglare speciale, factori determinati de conditiile de lucru deosebite in care pot aparea in diferite instalatii:
temperatura de lucru a mediului reglat foarte scazuta ( -270 C), sau ridicata (peste + 200 C);
toxicitatea si agresivitatea mediului de lucru;
corosivitatea mediului de lucru.
Robinetul cu capac cu nervuri se utilizeaza pentru inlaturarea influentei temperaturilor ridicate asupra garniturilor de etansare a tijei ce face legatura intre servomotor si ventil.Se utilizeaza un capac alungit, prevazut cu nervuri in vederea disiparii energiei calorice.
Robinetul cu manta de incalzire se utilizeaza pentru reglarea fluidelor vascoase, care se solidifica sau cristalizeaza repede sau care prezinta pericolul de a ingheta.Corpul robinetului este inconjurat cu o manta de tabla si, prin spatiul astfel creat, este vehiculat abur sau apa calda la presiune de 16 kgf/cm2.
Robinetul cu burduf de etansare asigura izolarea completa a tijei si capacului robinetului fata de mediul interior, pentru cazul cand fluidul de lucru dizolva grasimile din lubrifiantul garniturii sau prezinta pericol de explozie in contact cu atmosfera.
Robinetele cu elemente elastice sunt utilizate in mod curent in industria chimica.Aceste robinete nu au obturatoare (supape) special profilate, ci folosesc elemente elastice pentru strangularea sectiunii de trecere. Astfel, cazul robinetului Sanders obturatorul 1 actioneaza asupra membranei elastice 2, iar la robinetul cu furtun obturatorul 1 apasa asupra furtunului 2, dispus in interiorul corpului robinetului. Ambele variante se caracterizeaza prin aceea ca utilizeaza eficient numai 30% din cursa utila a tijei.
|
|
|
|
Robinet Sanders |
Robinet cu furtun |
|
1 obturator 2 membrana elastica |
1 obturator 2 furtun |
Vana Camflex. Sunt cazuri cand robinetul de reglare trebuie sa inchida complet conducta prin care trece fluidul. Atunci, daca mediul permite, se aseaza un inel din teflon pe suprafata de etansare a ventilului. Etansarea metal pe metal este posibila numai la ventilele cu un scaun, dar si in acest caz este nevoie de un servomotor capabil sa genereze o forta mult superioara celei normale, necesare deplasarii obturatorului.
|
| |
|
Vana Canflex |
Vana Camflex consta dintr-un obturator sferic legat de butucul central cu un brat, astfel incat prin rotatia arborelui cu maximum 50 se realizeaza inchiderea vanei. Acest dispozitiv este astfel conceput, incat asigura in centrul circumferintei de contact a obturatorului o traiectorie de forma unei came si obturatorul intra in contact cu scaunul sau doar in momentul inchiderii. Inchiderea perfect etansa se realizeaza prin deformarea elastica a bratului obturatorului.
Avantajul esential al vanei Camflex este acela ca asigura o etansare perfecta.In plus, ea se caracterizeaza printr-un efort redus al servomotorului si o functionare la temperaturi de -200.+400 ْ C si presiuni de 10-40 bar.
Cap. 3. Norme de tehnica securitatii muncii
La operatiile de intretinere a masinilor si aparatelor electrice, se va avea in vedere urmatoarele masuri de protectie a muncii:
- se vor respecta normele de tehnica a securitatii la lucrul in instalatiile electrice de joasa sau de inalta tensiune, dupa caz :
- la verificarea functionarii cat si la manevre, se vor utiliza echipamnete de protectie corespunzatoare : manusi, galosi sau cizme si covoarse electroizolante, achelari de protectie.
De asemenea, se vor respecta cu strictete instructiunile de exploatare a utilajului verificat ;
manevrele aparatelor de inalta tensiune se vor face de minimum doua persoane : un executant de grupa 2 sau 3 si un supravegheror de grupa minima 4 ;
la operatiile cu solventi si materiale inflamabile, se vor respecta atat regulile de prevenire si stingere a incendiilor cat si modul de utilizare a acestora in vederea prevenirii intoxicatiilor;
la lucrarile de montare, demontare, transport, se vor folosi numai utilaje de ridicat cu capacitatea corespunzatoare greutatilor de ridicat iar personalul care manevreaza instalatiile de ridicat trebuie sa fie autorizat.
Asigurarea inaccesibilitatii elementelor care fac parte din circuitele electrice si care se realizeaza prin:
amplasarea conductelor electrice, chiar izolate, precum si a unor echipamente electrice, la o inaltime inaccesibila pentru om. Astfel, normele prevad ca inaltimea minima la care se pozeaza orice fel de conducto electric sa fie de 4M, la traversarea partilor carosabile de 6M, iar acolo unde se manipuleaza materiale sau piese cu un gabarit mai mare, aceasta inaltime se depaseasca cu 2.25m gabaritele respective.
Izolarea electrica a conductoarelor;
Folosirea carcaselor de protectie legate la pamant;
Ingradirea cu plase metalice sau cu tablii perforate, respectandu-se distanta impusa pana la elementele sub tensiune.
Folosirea tensiunilor reduse (de 12, 24, 36V) pentru lampile si sculele electrice portative. Sculele si lampile portative care functioneaza la tensiune redusa se alimenteaza la un transformator coborator. Deoarece exista pericolul inversarii bornelor este bine ca atat distanta picioruselor fiselor de 12, 24 si 36V, cat si grosimea acestor picioruse, sa fie mai mari decat cele ale fiselor obisnuite de 120, 220 si 380 V, pentru a evita posibilitatea inversarii lor.
La utilizarea uneltelor si lampilor portative alimentate electric, sunt obligatorii:
verificarea atenta a uneltei, a izolatii ai a fixarii sculei inainte de incperea lucrului;
evitarea rasucirii sau a incolacirii cablului de alimentare in timpul lucrului si a deplasarii muncitorului, pentru mentinerea bunei stari a izolatiei;
menajarea cablului de legatura in timpul mutarii uneltei dint-un loc de munca in altul, pentru a fi solicitat prin intindere sau rasucire; unealta nu va fi purtata tinandu-se de acest cablu;
Deconectarea automata in cazul aparitiei unei tensiuni de atingere periculoase sau a unor scurgeri de curent periculoase. Se aplica mai ales la instalatiile electrice care functioneaza cu punctul neutru al sursei de alimentare izolat fata de pamant.
Protectia prin legare la nul se realizeaza prin construirea unei retele generale de protectie care insotesc in permanenta reteua de alimenare cu energi electrica a utilajelor.
ST. Garlasu s.a: Electronica si automatizari industriale, Editura Didactica si Pedagogica Bucuresti 1982;
S Hilohi, s.a., Elemente de comanda si control pentru actionari si sisteme de reglare automata, Editura Didactica si Pedagogica Bucuresti 2004;
Fl. Mares, s.a,, Elemente de comanda si control pentru actionari si sisteme de reglare automata, Editura Economica - Preuniversitria, Bucuresti 2002,
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 11193
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2024 . All rights reserved