| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
rotile autovehiculului
1.determinarea razei dinamice a rotilor motoare
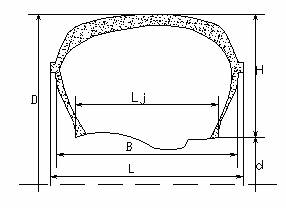
Fig1.Paramerii dimensionali al pneurilor
Autovehiculul studiat este echipat cu pneuri 195 / 75 R16C . acestui tip de pneuri se pot determina urmatoarele dimensiuni
B=>balonajul rotii
H=>Inaltimea maxima a balonajului
D=>diametrul exterior al pneului
d=>diametrul interior al pneului=diametrul jantei
r=>raza rotii
rs=>raza statica a rotii
rd=>raza dinamica a rotii =raza statica
Se cunoaste presiunea de umflare a rotilor p=0.30 MPa
B=195 mm
H/B=0.75 (1)
H=0.75xB (2)
H= 146,25 mm
d=16 in
d=406.4 mm
D=d+2H (3)
D=698,9
r=D/2 (4)
r=349,45 mm
λ=>coeficient de reducere a razei
coeficientul se ia in functie de presiunea de umflare a rotilor
rs= λ xr (5)
rs=rd=342.583 mm
rs=0.342583 mm
2.Echilbrul rotii motoare
2.1Echilbrul rotii
motoare (la viteza
Calculele se efectueaza avand in vedere fortele si momentele ce actioneaza asupra rotilor din figura 1
Ft=>forta de tractiune (reactiunea rotii asupra osiei)
Xm=>actiunea tangentiala acaii de rulare se opne patinariirotii si constituie o forta de impingere ce da nastere Ft aplicata in axul rotii
Z=>reactiunea normala acaii de rulare
Gr=>greutatea pe roata
a=>deplasareain fata a punctului de contactin care actioneaza reactiunea Zsi forta Xm
L=>lungimea petei de contact
Mr=>momentul la roata ce da nastere la Xm in acelas sens cu deplasarea
V=>viteza de deplasare
ωr=> viteza unghiulara a rotii
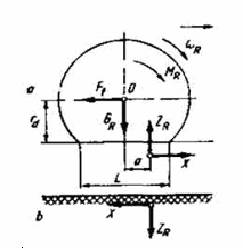
Fig.2. Dinamica rotii motoare
Echilibrul se efectueaza rezolvand ecuatia de momente fata de punctu O al axul rotii:
(ΣM)O: MR-a ZR-rdXR=0 MR= rdXR+ a ZR (6)
= rd( XR+a/rd+ ZR)
Se noteaza a/rd=f si se numeste coeficient de rezistenta la rulare. Xmax=φZR
Xmax≤φZR
MRmax≤ rd(fZR+φ ZR) => MRmax≤ rd(φ+f)ZR (7)
Se imparte relatia (6 ) cu rd => FRmax≤(φ+f)ZR FRmax≤(φ+f)GR (8)
Relatia (7) este conditia de aderenta.
Reactiunea tangentiala XR=0 => MR= a ZR=frdZR
MRmin< frdZR => frdGR< MR≤(φ+f)GR (9)
Relatia (8) reprezinta conditia de rulare fara alunecare.
2.2Echilbrul rotii motoare (cu viteza variabila)
In cazul demarajuluiintervin si fortele de inertie
Fir=>forta de inertie redusa in axul rotii
Mir=>momentul de inertie ce actioneaza asupra rotii
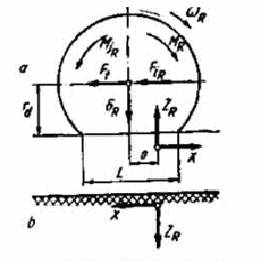
Fig.2. Dinamica rotii motoare la demaraj
Se considera ZR = GR
Se face suma de forte la roata:
XR-Ft- FiR=0, unde FiR este forta de inertie a rotii
Urmeaza sa se faca suma de momente fata de punctul O:
(ΣM)O: MR- MiR-a ZR-rdXR=0, unde MiR este momentul de inertie al rotii
FiR=mR(dVa/dt)
MiR=IR(dωR/dt), unde IR este momentul de inertie polar al rotii in raport cu axa geometrica a
rotii
Va=ωR rd
dVa/dt=(dωR/dt) rd
MR= IR(dVa/dt)(1/ rd)+ a ZR+ rdXR
= rd[IR(dVa/dt)(1/ rd)2+ fZR+ XR] (10)
Relatia (10) se imparte cu rd => FR= IR(dVa/dt)(1/ rd)2+ fZR+ XR
Se pune conditia ca X≤φ ZR FRmax≤(φ+f)ZR+ IR(dVa/dt)(1/ rd)2
MRmax≤ rd[(φ+f)ZR+ IR(dVa/dt)(1/ rd)2] (11)
3.Echilbrul rotii conduse
3.1.Echilbrul rotii
conduse (la viteza
F=>actiunea autovehiculului asupra rotii
La deplasarea rotii ce are loc sub actiunea fortei F ce e aplicata in axul rotii determina aparitia reactiunii tangentiale Xc in zona de contact dintre roata si drum
Xc forta de frecare indreptata in sens invers deplasarii autovehiculului
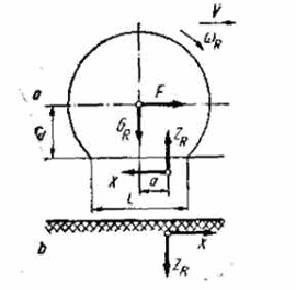
Fig.3. Dinamica rotii conduse (la viteza
Se scrie suma de momente fata de punctul O:
(ΣM)O=a ZR= rdXr=Mr (12)
Relatia (12) reprezinta momoentul de rezistenta la rulare
f ZR= ZR
X≤φZ => f≤φ (13)
Daca φ are valori mai mici decat cele permise, roata condusa nu mai ruleaza pe suprafata dru- mului ci incepe sa alunece in directia deplasarii.
Xr=φ ZR=Rr (14)
Relatia (13) reprezinta rezistenta la rulare a rotii.
b) Viteza este variabila
Fir=mr(dVa/dt)
Mir=Ir(dωr/dt) (15)
Va=ωRrd => dVa/dt=(dωR/dt) rd
Se considera: ZR = GR
Se face suma de forte fata de punctul O:
Xr-F+Fir=0
3.2.Echilbrul rotii conduse (la viteza variabila)
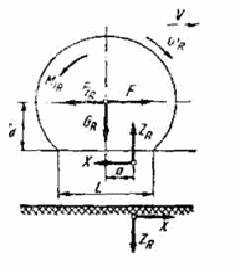
Fig.3 dinamica rotii conduse (la viteza variabila)
Suma de momente fata de punctul O este:
Mir+aZR-rdXr=0 => Mir= rd(Xr-f ZR)
Xr=F-Fir=F- mr(dVa/dt) (16)
Ir(dVa/dt)1/rd= rd(Xr-f ZR) (17)
Din relatile (16) si (17) => Xr, F => X≤φ ZR
F≥φ ZR+ Ir(dVa/dt)(1/rd)2 (18)
Relatia (17) reprezinta conditia de rulare fara alunecare in cazul deplasarii cu viteza variabila.
4 Echilibrul rotii franate
1Echilbrul rotii
frinate (la viteza
Roata franata este actionata de un moment de franare Mf care se opune rotirii rotilor si care da nastere unei forte in axul rotii Ff, forta de impingere(Fig4).
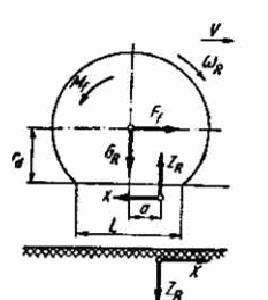
Fig 4 Momente si forte ce actioneaza la roata franata cand viteza este
Momentul de franare poate avea valori cuprinse intre limita minima 0 si o limita maxima la care
roata nu mai ruleaza ci aluneca pe suprafata drumului.
Se considera ca forta periferica la roata Xf=GR si
ZR=GR
Suma de momente fata de punctul O este:
(ΣM)O: Mf+aZR-Xfrd=0 => Mf= Xfrd-aZR Mf=rd(Xf-fZR) (19)
Xf≤φ ZR => Mfmax≤rd(φ-f)ZR (20)
Relatia (19) reprezinta conditia de rulare fara alunecare.
0< Mf≤ rd(φ-f)ZR
Mfmax/rd≤(φ-f)ZR => Ffmax≤(φ-f)ZR (21)
2Echilbrul rotii frinate (la viteza variabila)
Se stie ca ZR=GR (Fig5)
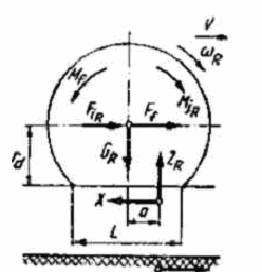
Fig. 5 Forte si momente ale rotii franate cand viteza este variabila
Suma de forte fata de punctul O:
(ΣM)O: Mf-MiR+aZR-Xfrd=0 (22)
FiR=mR(dVa/dt)
MiR=IR(dωR/dt)
Va=ωRdt
dVa/dt=(dωR/dt)rd => Ff= MiR/rd+fZR-RiR-Rit, unde:
RiR=(IR/rd) (dωR/dt) si se numeste rezistenta miscarii de inrtie la rotatie
Rit=mRrd(dωR/dt) si se numeste rezistenta miscarii de translatie a rotii
Mf-MiR+aZR-rd(Ff+FiR)=0 => Ff =Mf/rd-(IR/rd)(dωR/dt) +φZR-mRrd(dVa/dt) (23)
Ff =Mf/rd+fZR- RiR-Rit
5 Limitarea de catre aderenta a momentelor si fortelor ce incarca roata autovehiculului
La rulare, pe drumuri cu suprafete deformabile, forta de aderenta este conditionata de rezistenta materialului drumului la rupere si de patrunderea pneurilor in straturile deformabile.
La rularea pe drumuri cu suprafete tari, nedeformabile, forta de aderenta se datoreste in primul rand frecarii dintre pneu si calea de rulare si este de natura unei forte de frecare.
Forta maxima de aderenta depinde de:
- reactiunile normale ZR
- greutatile pe roata GR
- tipul anvelopei
- presiunea de umflare
- starea de uzura a benzii de rulare
- natura drumului
- starea drumului (ud, uscat, etc.)
Pentru roata motoare:
FRmax≤(φ+f)ZR
MRmax≤ rd(φ+f)ZR
frdGR< MR≤(φ+f)GR (24)
Pentru intreg automobilul:
Xmax≤fGad, unde Gad este greutatea aderenta care revine puntii motoare.
Pentru roata franata:
Ffmax≤(φ-f)GR
Mfmax/rd≤(φ-f)GR (25)
0< Mf≤ rd(φ-f)GR (26)
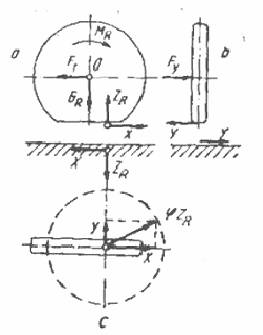
Fig. 6. Roata motoare asupra caruia actioneaza forta transversala FY
Daca asupra rotii motoare incarcate cu momentul MR, care produce forta de aderenta XR actioneaza o forta transversala FY, atunci reactiunea caii asupra rotii va avea si o componenta transversala de aderenta Y, care se mai numeste forta laterala de ghidare a rotii. Rezultanta forte lor de aderende aderenta X si Y nu va putea depasii valoarea fortei de aderenta permisa de cale si de incarcarea pe cale.
Conditia de rulare fara alunecare este:
![]() (27)
(27)
Oricare ar fi raportul dintre X si Y rezultanta lor va fi raza cercului X2+Y2-φ2Z2 cu raza φZ si se numeste cercul aderent. Pe masura ce momentul la roata creste, X creste si Y scade. La limitacand X=Xmax=φZ atunci Y=0. Acest lucru semnifica faptul ca roata nu mai poate prelua forte laterale fara sa derapeze. Y mentine autovehiculul pe traectoria curbilinie in viraj sau se opune deplasarii laterale cauzate de vant sau de inclinarea drumului.
Cercul de aderenta de raza φZ reprezinta limita ghidarii prin aderenta. In cazul rotilor incarcate cu MR sau Mf, exista posibilitatea ghidarii autovehiculului in curbe foarte reduse datorita existentei reactiunii Y de unde rezulta derapari la frecari sau accelerari in curbe.
Aderenta transversala φY=0,8φ
Aderenta este diferita de la o directie la alta in pata de contact, de unde rezulta in cazul real, in locul cercului de aderenta trebuie sa fie considerata elipsa de aderenta.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2848
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved