| CATEGORII DOCUMENTE |
| Astronomie | Biofizica | Biologie | Botanica | Carti | Chimie | Copii |
| Educatie civica | Fabule ghicitori | Fizica | Gramatica | Joc | Literatura romana | Logica |
| Matematica | Poezii | Psihologie psihiatrie | Sociologie |
Forte Hidrostatice
Fluidele fie ca se afla in repaus absolut sau relativ, exercita asupra suprafetelor solide cu care vin in contact forte de presiune hidrostatica. Din acest motiv aceste forte poarta denumirea de forte de presiune Fp.
Val Fp este considerabila si in consecinta de existenta acestor forte trebuie sa se tina seama in calculul de rezistenta al recipientilor care contin fluide in repaus.
Pt a stabili metodologia generala de calcul al acestor forte se considera un rezervor care contine un lichid omogen, de densitate r pana la nivelul H. La suprf libera se afla un gaz la pres po=ct, po>p.at
 Asupra unei suprafete elementare de arie S
din peretele rezervorului, actioneaza forta elementarade presiune dFp, unde:
Asupra unei suprafete elementare de arie S
din peretele rezervorului, actioneaza forta elementarade presiune dFp, unde:
![]()
Relatie in care n este normala exterioara la suprafata elementara dS
La nivelul intregului perete de arie S al recipientului, forta rezultanta de presiune Fp este data de relatia:
![]()
In mod curent determinarea modulului fortei hidrostatice de presiune se face cu relatia de mai sus deoarece in ac rel apare pres hidrostatica p (p=rgh)
Stabilirea modulului fortei hidros se face fct de suprf aflata in contact cu fluidul in repaus. In acest sens deosebim urm cazuri:
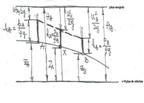
a- forte de pres pe suprf plane deschise se consid o suprf plana deschisa inclinata cu a=ct in raport cu supr S*
Suprf S retine un lichid omogen, izodens cu densit r=ct si de nivel H. La niv liber po=pat
Din suprf imersata se consid o suprf elementara de arie dS. As ac suprf se exercita o forta de pres elementara dFp. Pct in care act ac forta se pozitioneaza in rap cu sist de ref prin abscisa x si ordonata y, iar fata de niv liber prin cota h de imersare a ac pct.
dFp=pdS= rghdS
![]()
Se poate stabili o rel geometrica intre ordonata si adancimea h prin rel:
h=ysina, forta hidrostatica devine:
Fp=rgyGsinaS
YGsina=hG, unde hG este adancimea de imersare a centr de greutate G al suprf imersate.
Fp devine: Fp=rghGS, rghG=pG, Fp=pGS. Intensitatea (modulul) fortei hidrost e data de produsul dintre pres la niv centr de Greutate al suprf imersate si aria S a ac suprf.
 b- forte de pres pe suprf curbe
deschise se consid o suprf curba ABCD imersata si se raporteaza la un sist de ref
R:[xy:] a.i. ca pl xOy sa coincida cu niv liber, iar axa Oz este orientata spre
adancimea fluidului
b- forte de pres pe suprf curbe
deschise se consid o suprf curba ABCD imersata si se raporteaza la un sist de ref
R:[xy:] a.i. ca pl xOy sa coincida cu niv liber, iar axa Oz este orientata spre
adancimea fluidului
Forta hidrostatica de pres la niv suprf ABCD de arie S
P=rgh
![]()
![]()
Fpx=pGxSx, Fpy=pGySy, Fpz=pGzSz
Fz=rgVz - componenta verticala a fortei hidrostatice de presiune = cu greutatea corpului de presiune
Modulul fortei hidrostatice este
![]()
c- forte de pres pe suprf inchise - se consid un corp solid situat in interiorul unui fluid aflat in repaus. Fie corpul solid de forma oarecare, de greutate proprie Fg si de volum imersat total intr-un fluid in repaos de densitate r
 Se raporteaza corpul C la un sist de ref
R[xyz] cu planul xOy sa coincida cu planul nivelului liber al lichidului, iar
axa Oz, orientata spre adanc lichidului. Se urmareste det rezultantei fortelor
hidrostatice de presiune pe suprf S a intregului corp. Actiunea hidrostatica a
fluidului asupra corpului se reduce la componenta verticala Fpz.Pt det ac forte
se imparte corpul in prisme verticale. O as prisma e actionata pe cele 2 suprf
de capat dS1 si dS2.
Se raporteaza corpul C la un sist de ref
R[xyz] cu planul xOy sa coincida cu planul nivelului liber al lichidului, iar
axa Oz, orientata spre adanc lichidului. Se urmareste det rezultantei fortelor
hidrostatice de presiune pe suprf S a intregului corp. Actiunea hidrostatica a
fluidului asupra corpului se reduce la componenta verticala Fpz.Pt det ac forte
se imparte corpul in prisme verticale. O as prisma e actionata pe cele 2 suprf
de capat dS1 si dS2.
dFp1Z=p1dS1=(pat+rgh1)dS1
dFp2Z=p2dS1=(pat+rgh2)dS2
Daca suprf dS1=dS2=dSz, at forta elementara rezultanta dFpz e det de rel:
dFpz=dFp1z=-dFp2z=-rg(h1-h2)dSz=-rghdSz
unde h=h1-h2 este inaltimea prismei elementare
La nivelul intregului corp, forta hidrostatica rezultanta este:
![]()
Forta astfel stabilita poarta denumirea de forta ascensionara.
LEGEA LUI BERNOULLE IN CAZUL MISCARII PERMANENTE A FLUIDULUI IDEAL AFLAT IN MISCARE PE O LINIE DE CURENT.
Determinarea legii lui Bernoulli pentru fluidul ideal aflat in miscare
permanenta in lungul liniei de current se face prin aplicarea teoremei
impulsului unui domeniu de fluid D de volum V, cu densitatea ![]() aflat in miscare cu viteza locala
aflat in miscare cu viteza locala ![]()
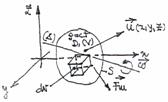

Din domeniul de fluid considerat, se detaseaza o particular de fluid de volum elementar
dv, de forma paralelipipedica. Pe baza proprietatilor de omogenitate si izotropie, legile de echilibru dynamic, determinate pentru particulele elementare de fluid pot fi generalizate si aplicate la intreg domeniul D.
Fie ![]() ,
masa particulei elementare considerate, impulsul elementar determinat de
deplasarea sa cu viteza
,
masa particulei elementare considerate, impulsul elementar determinat de
deplasarea sa cu viteza ![]() este:
este:
![]() (1)
(1)
Variatia in timp a impulsului unei particule de fluid aflata in miscare este egala cu suma fortelor exterioare:
![]() (2).
(2).
Daca viteza locala ![]() atunci primul termen al relatiei (2) devine:
atunci primul termen al relatiei (2) devine:
![]() (3)
(3)
Suma fortelor exterioare ![]() ,
este data de fortele masice si fortele de presiune
,
este data de fortele masice si fortele de presiune
![]() (4)
(4)
Unde fortele masice ![]() sunt:
sunt:
![]() (5)
(5)
Fortele de presiune sunt de forma:
![]()
Cu relatiile (5) si (6) relatia 4 devine:
![]()
In care: ![]()
![]()
![]() (8)
(8)
![]()
![]()
![]()
![]() (9)
(9)
![]()
![]()
Cu relatiile (8),(9) si (3), relatia (2) devine:
![]()
![]()
Sau:![]()
![]() (10)
(10)
Relatie vectoriala care proiectata pe directiile axelor de coordonate ale sistemului de referinta determina urmatorul sistem de ecuatii scalare:
![]()
![]()
![]()
![]() (11)
(11)
![]()
![]()
Sistemul de ecuatii scalare (11) reprezinta ecuatiile de echilibru hidrodinamic pentru miscarea permanenta a fluidului ideal.
Fortele masice specifice ![]() actioneaza
omogen si unitar asupra fiecarui punct(x,y,z)din domeniul considerat. Conditia
necesara si suficienta ca aceste forte sa nu modifice starea sistemului este
ca:
actioneaza
omogen si unitar asupra fiecarui punct(x,y,z)din domeniul considerat. Conditia
necesara si suficienta ca aceste forte sa nu modifice starea sistemului este
ca: ![]() (12)
(12)
Odata indeplinita conditia (12), exista o functie scalara ![]() ,
continua continua care indeplineste conditia:
,
continua continua care indeplineste conditia:
![]()
![]()
De unde se otine expresiile fortelor masice specifice:
![]() (13)
(13)
Din relatiile (13) sistemul de ecuatii (11) devine:
 (14)
(14)
Pe linga viteza de translatie domeniul de fluid D, are si o miscare de rotatie
cu viteza unghiulara ![]() in jurul axei instantanee a rotatiilor (
in jurul axei instantanee a rotatiilor (![]() ).
).
![]()
De unde dupa identificare dupa versorii ![]() ,
se obtin componentele scalare ale vectorului virtej
,
se obtin componentele scalare ale vectorului virtej ![]() si anume
si anume
![]()
Pentru a pune in evidenta in ecuatiile scalare (14) componenta rotationala a miscarii se aduna si se scade:
![]()
Relatia (16) :
![]()
![]()
![]()
![]()
![]()
![]()
Daca se au in veder relatiile (15)sistemul de ecuatii (16) devine:
 (17)
(17)
![]() deplasarea elementara. In relatiile (17)
toti termenii au semnificatia unei forte specifice. Aceasta forta specifica
inmultita cu deplasarea elementara determina un lucru mecanic elementar.
deplasarea elementara. In relatiile (17)
toti termenii au semnificatia unei forte specifice. Aceasta forta specifica
inmultita cu deplasarea elementara determina un lucru mecanic elementar.
![]()
![]() (18)
(18)
Daca ![]()
![]()
![]() functii continui in orice punct (x,y,z) al lui
D, atunci primul termen din ultima relatie devine:
functii continui in orice punct (x,y,z) al lui
D, atunci primul termen din ultima relatie devine:
 (19)
(19)
Determinantul din membrul drept este nul atunci cand are 2 linii sau 2 coloane proportionale.
![]() (20)
(20)
Relatia (20) reprezinta ecuatia diferentiala de conservare a energiei in cazul miscarii fluidului ideal in lungul liniei de current (de exemplu)
Relatia (20) devine:
![]() (21)
(21)
Expresia (21) poarta denumirea de functia Bernoulli pentru curgerea permanenta a fluidului ideal. Aceasta relatie arata ca energia specifica totala se conserva.
In doua sectiuni S1 si S2 situate pe linia de current, relatia (21) devine:
![]() (22)
(22)
In componenta gravitationala potentialul ![]() ,
al fortelor masice devine:
,
al fortelor masice devine:
![]() (23)
(23)
Iar relatia (22) devine:
![]() (24)
(24)
![]() functia Bernoulli este:
functia Bernoulli este:
![]()
Sonda de viteza cu tub Pitot Prandtl
1.Introducere
Sonda de viteza este un aparat de masura format dintr-un tub de viteza, racorduri flexibile si unul sau mai multe mijloace de masurare a presiunii. Tubul de viteza poate avea forma cilindrica, sferica sau profilata si permite determinarea vitezei intr-un punctual curentului fluid prin masurarea presiunilor statica si totala ale fluidului (metoda de masurare bazata pe cunoasterea presiunii dinamice).
Principiul de masura al metodei bazate pe cunoasterea presiunii dinamice se poate pune in evidenta daca se considera un current fluid in care se poate introduce un obstacol, fig.1.
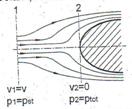
Fig.1. Principiul de masura al metodei
bazate pe determinarea presiunii dinamice.
Aplicand ecuatia lui Bernoullipentru fluide ideale incompresibile intre sectiunea 1, plasata in amonte fata de obstacol, sufficient de departe astfel incat curentul fluid san nu fie perturbat de prezenta obstacolului si sectiunea 2, plasat pe obstacol, in punctual de impact (stagnare) se obtine :
(1) ![]()
In care:
p1= pst si ![]() sunt presiunea statica, respective viteza
curentului fluid neperturbat de prezenta obstacolului;
sunt presiunea statica, respective viteza
curentului fluid neperturbat de prezenta obstacolului;
p2= ptot si ![]() sunt presiunea totala, respective viteza
fluidului in punctual de impact.
sunt presiunea totala, respective viteza
fluidului in punctual de impact.
Se obtine asadar:
(2) ![]() .
.
Relatia (2) pune in evidenta faptul ca in punctual de impact, datorita anularii vitezei, intreaga energie specifica a curentului fluid este sub forma de presiune.
Presiunea dinamica reprezinta diferenta dintre presiunea totala si presiunea statica, respective cresterea de presiune in punctual de stagnare:
(3) ![]() .
.
Relatia (3) permite exprimarea vitezei functie de presiunea totala si statica:
(4) ![]()
Sau functie de presiunea dinamica:
(5) ![]() .
.
2.Sonda de viteza cu tub Pitot Prandtl in curent incompresibil
Tubul Pitot Prandtl, reprezentat in figura 2, este format din partea frontala 1, cu diametrul exterior d, care este sustinuta de corpul 2. In interior se afla teava 3 care transmite presiunea totala captata la orificiul de presiune totala 4. Presiunea statica captata prin intermediul orificiilor de presiune statica 5 dispuse semiunghiular pe circumferinta corpului 2 este transmisa prin sectiunea inelara dintrea teava 3 si corpul 2. Cuplarea aparatului cu mijloacele de masurare a presiunii se face prin intermediul racordurilor de presiune statica 6 si totala 7.
Masurarea presiunilor se poate face fie cu ajutorul unui motaj format din piezometrele 8 si 10, care furnizeaza valorile presiunilor statica pst si totala ptot, urmand ca presiunea dinamica pd sa se obtina prin calcul (relatia 3); fie cu ajutorul piezometrului 9, care furnizeaza direct valoarea presiunii dinamice pd.
Figura 2 prezinra cazul general, al cuplarii tuturor celor 3 piezometre 8,9 si 10 la sonda de viteza cu tub Pitot.
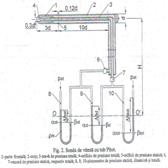
In absenta
curentului de fluid nivelul lichidului manometric cu densitatea ![]() se gaseste in acelasi plan orizontal in toate
piezometrele: planul de referinta general O-O' plasat la cota H fata de axa
corpului tubului Pitot.
se gaseste in acelasi plan orizontal in toate
piezometrele: planul de referinta general O-O' plasat la cota H fata de axa
corpului tubului Pitot.
In prezenta unui
current de fluid cu densitatea ![]() ,
presiunile captate de orificiile de presiune statica si totala ale sondei
determina aparitia unor denivelari
,
presiunile captate de orificiile de presiune statica si totala ale sondei
determina aparitia unor denivelari ![]() si
si ![]() la cele 3 manometre cu lichid 8,9 si respectiv
10.
la cele 3 manometre cu lichid 8,9 si respectiv
10.
Se aleg trei
plane de referinta de calcul ![]() si
si ![]() ,
orizontale si plasate la nivelul suprafetei de separatie dintre lichidul
manometric si fluidul a carui presiune se va masura.
,
orizontale si plasate la nivelul suprafetei de separatie dintre lichidul
manometric si fluidul a carui presiune se va masura.
Se scriu
relatiile presiunilor pt. planele de referinta de calcul ![]() :
:
Si ![]() :
:

![]()
Si apoi se face diferenta lor, obtinandu-se:
pd= ptot-pst=
![]()
Pe de alta parte,
daca se scriu ecuatiile presiunilor pentru planul de referinta de calcul ![]() :
:
Se obtine:
pd= ptot-pst=
![]() .
.
Din relatiile (6) si (7) se obtine urmatoarea relatie intre denivelarile inregistrate la cele trei manometre cu lichid:
(8) .
.
Inlocuind relatiile (6) si (7) in relatia vitezei (5) se obtin expresiile:
(9)![]() ,
,
(10)![]() .
.
3. Sonda de viteza cu tub pitot in current compresibil
Pentru cazul miscarii permanente a fluidelor ideale compresibile relatia Bernoulli se obtine din expresia:
(11)![]() .,
.,
prin efectuarea
integralei ![]() functie de legea de variatie a densitatii cu
presiunea.
functie de legea de variatie a densitatii cu
presiunea.
Astfel, in cazul unei transformari izentropice:
(12)![]() =const.,
=const.,
in care k este exponentul isentropic, relatia (11), devine:
(13)![]() =
const.,
=
const.,
Aplicarea relatiei (13) intre sectiunile 1 si 2 definite conform fig.1, conduce la:
![]()
din care se obtine pentru viteza curentului de fluid:
(14)![]()
sau, daca se considera ecuatia termica de stare:
(15)![]() =
RTst,
=
RTst,
(16)![]() .
.
Utilizarea relatiei (16) pentru determinarea vitezei curentilor compresibili presupune masurarea presiunilor pst si ptot, dar si masurarea temperaturii Tst.
Daca se introduce viteza sunetului prin relatia:
(17)![]() ,
,
si parametrul adimensional Mach prin expresia:
(18)![]()
relatia (14) devine:
(19)![]() .
.
Membrul stang al relatiei (19) se poate scrie sub forma:
astfel incat relatia (19) devine:
sau:
 (20)
(20)![]() ,
,
din care se obtine viteza curentului fluid:
(21)![]()
in care functia F(M) este data de expresia
(22)![]()
Dezvoltand in serie de puteri expresia (22) se obtine:
(23)![]()
Pentru o curgere caracterizata prin valori foaret mici ale parametrului adimensional M , functia F(M) devine:
M<<1,
F(M)![]() 1,
1,
relatia (21) a vitezei reducandu-se la formele uzuale pentru curgerea fluidelor ideale incompresibile (4) si (5)
Calculul vitezei se face prin iteratie, astfel:
Cu valorile presiunilor masurate ptot
si pst, sau pd se determina cu relatia(21) viteza
curentului intr-o prima aproximatie, pentru cazul F(M)=1. Se noteaza valoarea
obtinuta cu ![]() .
.
Se calculeaza valoarea parametrului adimensional M1.
Se determina functia F(M1).
Se recalculeaza viteza curentului cu
relatia (21), pentru cazul F(M1). Se noteaza valoarea astfel
obtinuta cu ![]() .
.
Procesul iterative continua pana cand: ![]() ,
in care
,
in care ![]() reprezinta un nivel de precizie impus , i fiind numarul iteratiilor.
reprezinta un nivel de precizie impus , i fiind numarul iteratiilor.
Reglarea presiunii in sistemele de actionare hidraulica
Supapele de presiune sunt aparate care influenteaza presiunea intr-un system hydraulic. Ele pot indeplini diferite functii: reglare sau reducere a presiunii, asigurare a unei anumite succesiuni de desfasurare a fazelor de lucru. Realizarea acestor functii se face intotdeauna dependent de presiunea din circuitul controlat sau din alt circuit.
Clasificarea supapelor de presiune se poate face si dupa alte creterii:
a. criteriul starii in faza neactionata: normal inchisa sau normal deschisa;
b. criteriul modului de lucru: cu comanda directa sau pilotata;
c. criteriul tipului de comanda: cu comanda interna sau externa;
d. criteriul tipului de drenaj: cu drenare interna sau externa.
Schema functionala a unei supape de presiune cuprinde un comparator si o semipunte de rezistente hidraulice.
1.Supapa de presiune cu comanda directa
Se constituie in principiu dintr-un comparator si o semipunte B cu Ri=0. Schema functionalaeste cea din fig. 1.
fig 1.
In comparatorul C se compara continuu valoarea reala a presiunii in circuit cu valoarea impusa prin pretensionarea initiala a arcului. Daca presiunea in circuit depaseste valoare impusa se modifica deschiderea rezistentei Re pana la scaderea presiunii la valoarea impusa. Schema constructiva este data in fig 2.a iar in fig 2.b simbolizarea.
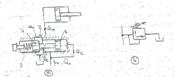
FIG 2.a.2.b
Elementul mobil 1 materializeaza comparatorul prin suprafetele sale laterale si rezistenta reglabila intre muchia activa a si scaunul din corpul 2. Combinatia de forme, element mobil-scaun mai poate fi si de tip con-cilindru sau sfera-cilindru. Pretensionarea arcului 3este reglabila ceea ce presupune posibilitatea modificarii presiunii reglate prin intermediul supapei.
Supapele cu comanda directa prezinta 2 inconveniente importante legate de utilizarea fortei elastice ca marime prescrisa:
forta se modifica aunc cand creste deschiderea, determinata de cresterea debitului, din acest motiv presiunea reglata depinde de debit;
o supapa are un domeniu de reglare restrans de caracteristicile constructive ale arcului.
Aceste inconveniente sunt inlaturate daca forta prescrisa este forta de presiune. Supapa de presiune pilotata utilizeaza aceasta solutie constructiva.
2. Supapa de presiune pilotata
Cuprinde 2 supape: supapa principala si supapa pilot, supapa principala avand ca forta de referinta o forta de presiune a carei valoare este reglata cu ajutorul supapei pilot.
Schema functionala a supapei de presiune pilotate este data in fig 3.
Fig. 3
Supapa principala este construita din comparatorul C1 si semipuntea B cu Ri1=0 si Re1. C1 compara presiunea din sistem cu presiunea impusa pi in urma compararii, modificandu-se Re1. Presiunea impusa se regleaza cu ajutorul pilotului prin pretensionarea initiala a arcului comparatorului C2. Rezultatul compararii facute de C2 influenteaza Re2.
Schema functionala din fig 2 poate fi materializata in diverse variante constructive, una dintre acestea fiind cea din schema 3a.
Fig 4. a.
Fig. 4.b
Elementul mobil 1 materializeaza atat comparatorul C1 (asupra sa actioneaza forta de presiune data de presiunea din sistem careia i se opune forta de presiune data de pi si forta dinA1) cat si rezistenta reglabila Re1.
Elemental mobil 2, supapa pilot, materializeaza C2 si Re2. Rezitenta hidraulica fixa Ri2 este fixate pe calea de legatura intre intrarea in supapa principala si supapa pilot, cale notata Px. Px se mai numeste cale de comanda iar Rx cale de dreanj.
Locul in care sunt legate Px si Tx determina cele 4 moduri de lucru ale supapei normal inchise:
Px intern, Tx intern - supapa de siguranta
supapa de deversare
Px intern, Tx extern -supapa de succesiune
Px extern, Tx intern -supapa de deconectare
Px extern, Tx extern -supapa de conectare
Supapa de presiune normal deschisa lucreaza intr-un singur mod de lucru: supapa de reducere.
Calculul supapelor consta in determinarea sectiunii de trecere la deschidere maxima si a dimensiunilor arcului. Pentru a determina comportarea aparatului in regim dinamic este necesar modelul matematic al acestuia. De exemplu, pentru supapa normal inchisa cu comanda directa(fig 2.a) se pot scrie urmatoarele ecuatii:
- debitul pe circuitul de comanda
![]() in care y este deplasarea instantanee a
elementului mobil 1, Vc este volumul de ulei in camera de comanda si in
canalizatia de legatura, E este modulul de elasticitate al uleiului.
in care y este deplasarea instantanee a
elementului mobil 1, Vc este volumul de ulei in camera de comanda si in
canalizatia de legatura, E este modulul de elasticitate al uleiului.
- ecuatia de debit este:
![]()
- debitul prin rezistenta reglabila:
![]() in
care
in
care ![]() este
coeficientul de debit al rezistentei hidraulice iar d este diametrul sertarului
1.
este
coeficientul de debit al rezistentei hidraulice iar d este diametrul sertarului
1.
Ecuatia de echilibru a fortelor ce actioneaza asupra sertarului:
![]()
in care ms este masa sertarului, h este constanta de amortizare, k este constanta elastica.
Se poate determina frecventa mecanica naturala
![]()
Din analiza termenilor ecuatiei (1) se poate stabili care este regimul de
lucru al supapei: oscilatii amortizate, miscare aperiodica sau oscilatii
fortate, regimuri care depend de tipul fortei perturbatoare care actioneaza
asupra supapei.
Ecuatia
fundamentala Euler pentru pompe centrifuge
Aceasta ecuatie se aplica studiului miscarii fluidului prin rotorul turbopompelor centrifuge ,care constituie generatoarele hidraulice rotodinamice.
Principalul organ de lucru in cazul generatoarelor rotodinamice il reprezinta rotorul care folosind lucrul mecanic primit de la arboreal electromotorului de actionare,transmite curentului de fluid o anumita cantitate de energie hidraulica .Rotorul pompelor este un dispozitiv centrifuge prevazut cu un cap cu palete formand canale interpaletare caracterizate prin 2 elemente geometrice:curbura in spatiu si schimbarea sectiunii de trecere care asigura transformarea energiei de tip hydraulic.Daca distanta dintre 2 palete successive ar fi finit de mica ,pt un observatory ce s-ar misca impreuna cu rotorul ,toate particulele ar avea traiectorii c ear coincide cu forma paletei .La rotoarele reale insa ,paletele fiind dispuse distantat ,particulele care parcurg zona mediana a canalului interpaletar ,pot avea traiectorii ce difera de forma paletei .De aceea pt determinarea ecuatiei fundamentale Euler ,se considera urmatoarele ipoteze simplificatoare:
-se considera rotorul ca avand un nr infinit de palete de grosime infinit mica
-se neglijeaza pierderile hidraulice la miscarea fluidului in interiorul rotorului
Inaltimea
de pompare obtinuta cu aceste ipoteze va fi diferita de cea reala si se numeste
inaltime de pompare teoretica pt numar infinit de palete H![]() .
.
Consideram
reperul fix triortogonal Oxyz si un canal interpaletar ce se roteste cu viteza
unghiulara constanta ![]() in
jurul axei Ox (fig.1) .O particular de fluid situate in punctual 1 ,rotindu-se
pe cercul de raza
in
jurul axei Ox (fig.1) .O particular de fluid situate in punctual 1 ,rotindu-se
pe cercul de raza ![]() are viteza tangentiala
are viteza tangentiala ![]() .In
acelasi timp particular se deplaseaza cu viteza
.In
acelasi timp particular se deplaseaza cu viteza![]() din punctual 1 ,dupa axa canalului de pana interpaletar ,tangent la aceasta
pana in punctual 2 de pe cercul de raza r
din punctual 1 ,dupa axa canalului de pana interpaletar ,tangent la aceasta
pana in punctual 2 de pe cercul de raza r![]() unde ajunge cu viteza relative
unde ajunge cu viteza relative ![]()
![]() si viteza tangentiala
si viteza tangentiala ![]()
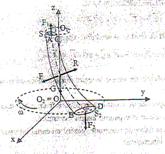
Fig ..1
Un observator din afara canalului (plasat in o de exemplu) sesizeaza rotatia simultan cu deplasarea in canalul interpaletar deci percepe traiectoria absoluta a particulei ca fiind infasuratoare vitezelor absolute c=u+w ale particulei In fiecare punct al canalului se se pot construe triunghiuri ale vitezelor formate din viteza tangentiala u ,viteza relative w si viteza absoluta c.In figura 2 c este reprezentat un astfel de triunghi pt intrarea in rotor iar in figura 2 d pt iesirea din rotor .Celelalte elemente ale triunghiurilor de viteze sunt :
-unghiul
vitezei absolute sau unghiul functional ![]()
-unghiul
vitezei relative sau unghiul constructive ![]()
-componenta
radiala sau meridionala a vityezei absolute c![]()
-componenta
tangentiala a a vitezei absolute c![]()
Pt
calculul lui H![]() se
pot aplica 2 metode:
se
pot aplica 2 metode:
a) teoremele impulsului si a momentului kinetic
b) Teoremele lui Bernoulli pt miscarea relative si absoluta a fluidului prin rotor.

Fig.2
Se
aplica teorema impulsului masei de fluid aflata in canalul interpaletar
,delimitat de suprafata de control ABCD ,ce corespunde suprafetelor de intrare
si iesire din rotor (corespunzatoare cilindrilor de raza r![]() ),palete
AB si CD si celor 2 inele ,anterior si posterior ,ale rotorului (fig.si 1 si 2
b)
),palete
AB si CD si celor 2 inele ,anterior si posterior ,ale rotorului (fig.si 1 si 2
b)
![]()
![]() (1)
(1)
Pt cele z canale interpaletare ,teorema impulsului va fi:
![]() (2)
(2)
Iar momentele cinetice ale fortelor in raport cu axul O al rotorului vor fi :
zpQ![]() (3)
(3)
![]()
![]() -sunt fortele de presiune pe
suprafetele de intrare si iesire din suprafata de control (respective intrare
si iesire din rotor )
-sunt fortele de presiune pe
suprafetele de intrare si iesire din suprafata de control (respective intrare
si iesire din rotor )
![]() -este greutatea fluidului
cuprins in suprafata de control (respective intr-un canal interpaletar )
-este greutatea fluidului
cuprins in suprafata de control (respective intr-un canal interpaletar )
![]() -este forta de reacxtiune al
peretilor canalului interpaletar asupra curentului
-este forta de reacxtiune al
peretilor canalului interpaletar asupra curentului
![]() si
si ![]() sunt
razele vectoare ale greutatii si fortei de reactiune ,pt un canal interpaletar
,
sunt
razele vectoare ale greutatii si fortei de reactiune ,pt un canal interpaletar
,
Q![]() -debitul
tranzitat printr-un canal interpaletar
-debitul
tranzitat printr-un canal interpaletar
Q=z Q![]() -debitul
rotorului
-debitul
rotorului
Dar :
![]() =M
=M![]() este
momentul cu care rotorul actioneaza asupra curentului
este
momentul cu care rotorul actioneaza asupra curentului
-momentele
fortelor de presiune ![]()
![]() sunt nule deoarece rezulantele fortelor de
presiune pt sectiunile de intrare si iesire din fiecare canal interpaletar
,trec prin axul O de rotatie ;
sunt nule deoarece rezulantele fortelor de
presiune pt sectiunile de intrare si iesire din fiecare canal interpaletar
,trec prin axul O de rotatie ;
-datorita
simetriei rotorului ,momentul greutatii ![]() -
este nul pt ansamblul rotoric
-
este nul pt ansamblul rotoric
In aceste conditii rel.(3)capata forma :
![]()
![]() (4)
(4)
Si
cum: ![]() (5)
(5)
![]()
Rezulta ![]() =
=![]() (
(![]() -
-![]() ) (6)
) (6)
Puterea
transmisa fluidului de catre rotor va fi pe de o parte :N![]() sip
e de alta parte N
sip
e de alta parte N![]() Q,deci
putem scrie:
Q,deci
putem scrie:
![]() (7)
(7)
Se obtine astfel ecuatia lui Euler pt generatoare hidroninamoce ,forma in triunghiuri .
![]() (8)
(8)
Relatia poate fi scrisa si sub forma :
![]() (9)
(9)
Pentru
calculul lui H![]() cu ajutorul teoremelor lui Bernoulli pt miscarea absoluta si relative a
fluidului prin rotor se scrie :
cu ajutorul teoremelor lui Bernoulli pt miscarea absoluta si relative a
fluidului prin rotor se scrie :
-teorema lui Bernoulli pt. miscarea absoluta a fluidului intre intrare si iesire :
![]() (10)
(10)
-teorema lui lui Bernoulli pentru miscarea relative a fluidului intre intrare si iesire
 (11)
(11)
Combinand relatiile 10 si 11 se obtine ecuatia lui Euler pentru generatoare hidrodinamice ,forma in viteze.
![]() (12)
(12)
Relatiile 8 si 12 sunt echivalente daca tinem cont ca :
![]()
![]() (13)
(13)
In legatura cu ecuatia lui Euler se pot face urmatoarele observatii :
1.Sarcina
teoretica ![]() reprezinta pt un generator hidrodinamic
turbionar ,un caz ideal .Ea corespunde unei deplasari a fluidului in rotor fara
freacare si fara vartejuri ,viteza relative w fiind uniform distribuita pe
intreaga sectiune ca canalelor si avand aceeasi valoare pt toate particulele ce
se gasesc pe aceeasi raza r
reprezinta pt un generator hidrodinamic
turbionar ,un caz ideal .Ea corespunde unei deplasari a fluidului in rotor fara
freacare si fara vartejuri ,viteza relative w fiind uniform distribuita pe
intreaga sectiune ca canalelor si avand aceeasi valoare pt toate particulele ce
se gasesc pe aceeasi raza r
2.Din
structura ecuatiei Euler ,forma in viteze ,se observa ca marimea sarcinii![]() nu
depinde de natura fluidului ci numai de vitezele din zonele de intrare si
iesire din rotor .Aceasta ecuatie este valabila atat pentru generatoare
hidrodinamice care vehiculeaza lichide(turbopompe) cat si pt cele care
vehiculeaza gaze (ventilatoare,suflante ,compresoare).
nu
depinde de natura fluidului ci numai de vitezele din zonele de intrare si
iesire din rotor .Aceasta ecuatie este valabila atat pentru generatoare
hidrodinamice care vehiculeaza lichide(turbopompe) cat si pt cele care
vehiculeaza gaze (ventilatoare,suflante ,compresoare).
3.Unghiurile
![]() determina sensul si directia vitezelor
relative w ,fiind determinate de geometria rotorului .Ele sunt independente de
conditiile de lucru si se numesc unghiuri constructive ale rotorului
.Unghiurile
determina sensul si directia vitezelor
relative w ,fiind determinate de geometria rotorului .Ele sunt independente de
conditiile de lucru si se numesc unghiuri constructive ale rotorului
.Unghiurile ![]() se numesc unghiuri functionale si depend de
marimea vitezei tangentiale u ,precum si de cantitatea de fluid care circula
prin rotor (debitul volumetric Q)
se numesc unghiuri functionale si depend de
marimea vitezei tangentiale u ,precum si de cantitatea de fluid care circula
prin rotor (debitul volumetric Q)
4.Ecuatiile
lui Euler pentru turbopompe arata ca valoarea maxima a lui ![]() se
obtine in cazul intrarii normale (cu soc minim la intrarea in rotor )cand
unghiul
se
obtine in cazul intrarii normale (cu soc minim la intrarea in rotor )cand
unghiul ![]() ,corespunzator
triunghiului de viteze de la intrare ,este drept(
,corespunzator
triunghiului de viteze de la intrare ,este drept(![]() =90
=90![]() )
)
Sarcina teoretica infinita maxima va avea deci expresia:
![]()
Reglarea pompelor centrifuge
Prin reglarea unei pompe se intelege modificarea parametrilor de lucru ai pompei astfel incat aceasta sa faca fata regimurilor variabile de inaltimi de pompare si debite cerute de instalatia deservita.
Exista urmatoarele procedee princupale de reglare :
a. prina variatia turatiei pompei ;
b. obturarea traseului prin robinete ;
c. modificarea paletajului ;
d. strunjirea rotorului ;
e. modificarea montajului la pompe cu mai multe etaje ;
f. legarea serie-paralel a doua sau mai multe pompe in timpul functionarii ;
g. reglarea prin conducte de intoarcere (by-pass)
a. Prin variatia turatiei modifica atat caracteristica de sarcina interioara cat si curba de randament.
Astfel ,punctul de functionare se deplaseaza in punctele F1,F2,f3 corespunzatoare turatiilor n1,n2,n3 care, in general corespund randamentelor maxime (fig .1).Acest procedeu de reglare este economic insa necesita folosirea unor motoare de antrenare cu turatie variabla, fapt ce limiteaza utilizarea acestui procedeu numai la pompele antrenate cu motoare de curent continu, motoare cu ardere interna, turbine si motoare sincrone cu tutatie variabila (cu tristori).
![]()

parafina
b.Reglarea prin robinete plasate pe conducta de refulare (cel mai frecvent)sau pe conducta de aspiratie (mai putin utilizat ca urmare a apritiei fenomenului de cavitatie datorat cresterii pierderilor de sarcina pe aspiratie).Prin inchiderea robinetului se modifica curba caracteristica a retelei de conducte, punctule de functionare deplasandu-se din punctul F1(Q1,H1) in punctul F2(Q2,H2)-(figura 2).Procedeul este simplu si rapid dar neeconomic conducand la pierderi de energie hidraulica .
c.Procedeul prin modificarea paletajului consta in obturarea canalelor rotorului prin infundarea lor cu parafina (fig 3).Procedeul este economic dar nu poate fi utilizat decit in conditii de reglare permanenta, obturarea canalelor necesita demontarea rotorului.
d. procedeul prin strunjirea
rotorului consta in modificarea diametrului D2 al rotorului prin
strunjire, folosind motoare de antrenare a pompei de tip asincron(n=ct). Astfel
prin strunjirea rotorului punctul de functionare se deplaseaza in punctele F1,
F2, F3 corespunzatoare diametrelor ![]() care,
in general corespund randamentelor maxime (fig 4). Acest procedeu de reglare
este economic insa necesita demontarea rotorului.
care,
in general corespund randamentelor maxime (fig 4). Acest procedeu de reglare
este economic insa necesita demontarea rotorului.
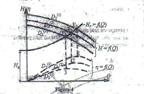
FIG 4
e. modificarea montajului la pompele cu mai multe etaje este un procedeu care se obtine prin:
demontarea unui numar de rotoare(necesita oprirea agregatului). Prin acest procedeu se miscoreaza inaltimea de pompare.
Cuplarea in serie si (sau) paralel a etajelor in timpul functionarii pompelor. Solutia poate fi utilizata numai in cazul pompelor multietajalte dotate cu circuite exterioare intre etaje.
f. legarea in serie-paralel a doua sau mai multe pompe in timpul functionarii. In fig 5 este reprezentata o schema de cuplare serie-paralel a doua pompe. In conditiile in care robinetele R1,R3 si R4 sunt dechise iar R2 este inchis pompele functioneaza in serie. Prin reglarea robinetelor, atat la fuctionarea in paralel cat si in serie, se poate obtine un domeniu larg de variatie a parametrilor Q si H.
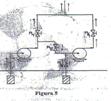
Fig 5
g. reglarea prin conducte de intoarcere(by-pass). In acest caz pompa functioneaza la parametri nominali (Q si H), cu randament maxim dar debitul conductei de intoarcere Q2 realizeaza un consum de energie suplimentar direct proportional cu acest debit(fig 6). Procedeul se utilizeaza pana la valori maxime ale debitului de intoarcere Q2max=0,2Q.

Fig 6
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2441
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved