| CATEGORII DOCUMENTE |
| Astronomie | Biofizica | Biologie | Botanica | Carti | Chimie | Copii |
| Educatie civica | Fabule ghicitori | Fizica | Gramatica | Joc | Literatura romana | Logica |
| Matematica | Poezii | Psihologie psihiatrie | Sociologie |
Identificarea experimentala
a sistemelor
de ordinul I SI ORDINUL II
OBIECTIVELE LUCRARII
Identificarea unor sisteme de diverse ordine de marime prin urmarirea evolutiei in timp a iesirii in conditiile aplicarii la intrarea sistemelor a unor semnale tip: treapta, rampa, sinusoida;
2. BREVIAR TEORETIC
Sisteme de ordinul intai
Modelul unui sistem de tip continuu, liniar, invariant,
monovariabil si cu parametri concentrati este ![]() (9.1)
(9.1)
unde: u= marime de intrare; y= marime de iesire.
In regim stationar se obtine modelul
![]() (9.2)
(9.2)
care conduce la obtinerea unui raspuns de forma
![]() (9.3)
(9.3)
In ceea ce priveste ordinul maxim de derivare al intrarii si al iesirii, se deosebesc trei cazuri:
-daca r<n, sistemul este strict propriu;
-daca r=n, sistemul este simplu propriu;
-daca r>n, sistemul este impropriu.
Sistemele de ordinul intai sunt descrise de ecuatia
![]() (9.4)
(9.4)
Rezolvand aceasta ecuatie in domeniul timpului se obtine urmatorul raspuns al sistemului
![]() (9.5)
(9.5)
Notand cu ![]() =
=![]() si cu
si cu ![]() , se obtine urmatoarea expresie a iesirii:
, se obtine urmatoarea expresie a iesirii:
![]() (9.6)
(9.6)
unde:
T = constanta de timp a sistemului;
![]() = raspunsul sistemului in regim stationar;
= raspunsul sistemului in regim stationar;
Durata regimului tranzitoriu este![]() =3T si exprima timpul in care
raspunsul sistemului ajunge la 95% din valoarea raspunsului in regim
stationar.
=3T si exprima timpul in care
raspunsul sistemului ajunge la 95% din valoarea raspunsului in regim
stationar.
Pentru sistemele de ordinul intai fara anticipare (ordinul maxim de derivare al intrarii este zero), se deosebesc urmatoarele cazuri:
a) ![]() , modelul stationar este
, modelul stationar este
![]() (9.7)
(9.7)
si exprima sistemul de tip proportional;
b) ![]() , sistemul este de tip integrator cu urmatorul model
, sistemul este de tip integrator cu urmatorul model ![]() , (9.8)
, (9.8)
avand raspunsul
 (9.9)
(9.9)
In cazul in care ordinul de derivare al intrarii este 1 si este mai mare decat ordinul de derivare al iesirii (sistemul este impropriu), se mai poate deosebi un al treilea caz care este clar idealizat deoarece toate sistemele fizice sunt sisteme proprii.
c) ![]() , sistemul este de tip derivator,
cu modelul
, sistemul este de tip derivator,
cu modelul ![]() , (9.10)
, (9.10)
care are raspunsul: ![]() (9.11)
(9.11)
Functia de transfer a unui sistem de ordinul intai fara anticipare este
![]() (9.12)
(9.12)
Graficele raspunsului in timp ale sistemelor de ordinul intai la diferite tipuri de intrari: treapta, rampa si sinusoida sunt reprezentate in figura 9.1.
Fig.9.1. Raspunsuri in timp ale sistemului de ordinul intai la diferite tipuri de marimi de intrare: treapta, rampa si sinusoida
Practic, un sistem de ordinul intai se poate obtine cu un circuit RC, reprezentat in figura 9.2.
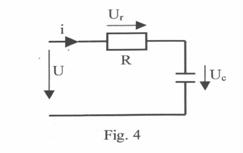
Fig.9.2.. Circuit RC
Modelul matematic este prezentat in setul (9.13)
Ecuatia care descrie sistemul de ordinul intai este
![]() (9.14)
(9.14)
unde: ![]() =caderea de tensiune pe condensator;
=caderea de tensiune pe condensator;
![]() =caderea de tensiune pe rezistenta;
=caderea de tensiune pe rezistenta;
U=tensiunea de alimentare a circuitului RC;
I=intensitatea curentului prin circuit;
R=rezistenta, C=condensator.
Intrarea sistemului a fost considerata tensiunea de alimentare a circuitului RC, iar iesirea sistemului a fost considerata tensiunea masurata la bornele condensatorului C (Uc). Schema bloc a sistemului de ordinul intai este prezentata in figura 9.3.
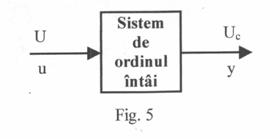
Fig. 9.3.. Schema bloc a sistemului de ordinul intai
2.2 Sisteme de ordinul doi
Sistemele continue de ordinul doi fara anticipare sunt descrise de ecuatia
![]() , (9.15)
, (9.15)
Rezolvand ecuatia in domeniul timpului se obtine raspunsul sistemului
![]() , (9.16)
, (9.16)
cu ![]() si
si ![]() doua constante
determinate din conditiile initiale, iar A, B solutii ale ecuatiei
doua constante
determinate din conditiile initiale, iar A, B solutii ale ecuatiei
![]() (9.17)
(9.17)
Componenta ![]() se numeste componenta
libera, dependenta numai de structura sistemului,
neinfluentata de forma de variatie a intrarii, iar
componenta
se numeste componenta
libera, dependenta numai de structura sistemului,
neinfluentata de forma de variatie a intrarii, iar
componenta ![]() , se numeste componenta
fortata, numita astfel deoarece este rezultatul
"fortarii" in forma raspunsului a unei componente de tipul
intrarii.
, se numeste componenta
fortata, numita astfel deoarece este rezultatul
"fortarii" in forma raspunsului a unei componente de tipul
intrarii.
Functia de transfer a unui sistem de ordinul doi fara anticipare este
![]() (9.18)
(9.18)
Graficele raspunsurilor in timp ale sistemelor de ordinul doi la diferite intrari tip: treapta, rampa, sinusoida sunt prezentate in figura 9.4.
Fig.9.4. Graficele raspunsurilor in timp ale sistemelor de ordinul doi la diferite tipuri de marimi de intrare: treapta, rampa si sinusoida
Practic, un sistem de ordinul doi se poate obtine cu un circuit RLC de tipul celui din figura 9.5.
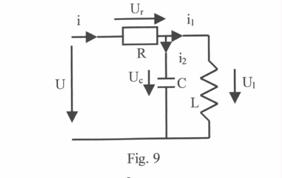
Fig.9.5. Circuit RLC
Modelul matematic este
Se obtine astfel un model de forma
![]()
unde:
U=tensiunea de alimentare a circuitului RLC
![]() =caderea de tensiune pe rezistenta;
=caderea de tensiune pe rezistenta;
![]() =caderea de tensiune pe condensator;
=caderea de tensiune pe condensator;
![]() =caderea de tensiune pe bobine;
=caderea de tensiune pe bobine;
i=intensitatea curentului prin rezistenta;
![]() =intensitatea curentului prin bobine;
=intensitatea curentului prin bobine;
![]() =intensitatea curentului prin condensator;
=intensitatea curentului prin condensator;
R=rezistenta;
C=condensator;
L=bobina.
Intrarea sistemului a fost considerata tensiunea de alimentare a
circuitului RLC, U, in timp ce iesirea a fost considerata
caderea de tensiune pe bobina L, ![]() .
.
Schema bloc a sistemului este reprezentata in figura 9.6.
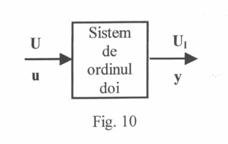
Fig.9.6. Schema bloc a sistemului de ordinul doi.
3. MODUL DE LUCRU
Schema bloc a montajului utilizat pentru identificarea sistemelor de diverse ordine de marime este reprezentata in figura 9.7.
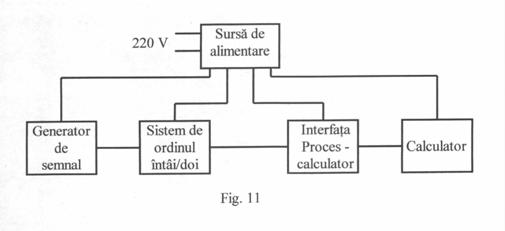
Fig. 9.7. Schema bloc a montajului utilizat pentru identificarea experimentala a sistemelor.
1. Conform schemei din figura 9.7, se interconecteaza blocurile componente, cu urmatoarele observatii:
se vor respecta regulile de conectare a interfetei la alimentarea cu 5V (plusul, respectiv masa, de la sursa de alimentare, la firul de +5V, respectiv de masa, la interfata);
se va conecta cablul paralel de la interfata la portul paralel al PC-ului;
se va conecta la intrarea interfetei iesirea de la cele doua sisteme; acestea vor avea la intrare semnalele de tip treapta sau sinusoida date de versatester.
Se lanseaza in executie programul aferent (IS.EXE, varianta de DOS, sau IDENT. EXE, varianta de Windows);
De la generatorul de semnal versatester tip E0502 se vor emite un semnal sinusoidal, respectiv dreptunghiular, cu frecventa de 1 Hz;
4. In urma vizualizarii rezultatelor experimentului, se vor identifica sistemele analizate;
5. La sfarsitul lucrarii se vor deconecta elementele componente.
Cu ajutorul generatorului de semnal, studentii vor aplica la intrarea circuitelor RC si RLC (descrise in partea teoretica), semnale de tip treapta si sinusoida.
Pentru obtinerea unei bune discretizari a semnalului analogic y, s-a utilizat un convertor analogic-numeric pe 8 biti la iesire. Deoarece portul paralel are doar 4 biti de intrare a fost necesara utilizarea unui buffer.
Interfata "proces" - calculator are la baza un convertor analog-numeric care face posibila vizualizarea pe monitorul unui calculator a valorilor iesirii y in timp si a graficelor iesirii y pentru diversele intrari aplicate la intrarea sistemelor.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2184
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved