| CATEGORII DOCUMENTE |
| Astronomie | Biofizica | Biologie | Botanica | Carti | Chimie | Copii |
| Educatie civica | Fabule ghicitori | Fizica | Gramatica | Joc | Literatura romana | Logica |
| Matematica | Poezii | Psihologie psihiatrie | Sociologie |
1. Reprezentare parametrica
Fie Σ o suprafata determinata de panza parametrizata nesingulara
![]()
unde x, y, z I Ck(D). Relatiile
 (u,
v) I D (2.1)
(u,
v) I D (2.1)
se numesc ecuatiile parametrice ale suprafetei Σ
Fie, acum, M(x(u,v), y(u,v), z(u,v)) un punct al suprafetei Σ. Atunci
![]()
este vectorul de pozitie al punctului M. Ecuatia
![]() , (u, v)
I D (2.2)
, (u, v)
I D (2.2)
se numeste ecuatia vectoriala a suprafetei Σ
Daca M(x(u,v), y(u,v), z(u,v)) un punct al suprafetei Σ, atunci u si v se numesc coordonate curbilinii sau coordonatele lui Gauss ale punctului M.
Fie acum M0 = r(u0, v0). Pentru v = v0 fixat, atribuind lui u toate valorile posibile (adica, pentru care avem (u, v0) I D), punctele N = r(u, v0) descriu in vecinatatea punctului M0 o curba pe suprafata Σ. Acelasi lucru se intampla pentru u = u0 fixat.
Aceste curbe se numesc linii de coordonate sau curbe de coordonate si sunt imaginile prin functia r a segmentelor paralele cu axele de coordonate, de ecuatii u = u0 si v = v0, situate in domeniul D (fig. 2.1). Tinand seama de injectivitatea lui r, cele doua linii de coordonate au un singur punct comun si anume punctul M0. Cand punctul (u0, v0) parcurge D, aceste linii de coordonate formeaza o retea pe suprafata , numita reteaua liniilor (curbelor) de coordonate (fig. 2.2).
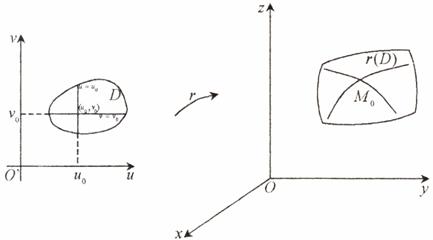
Fig. 2.1
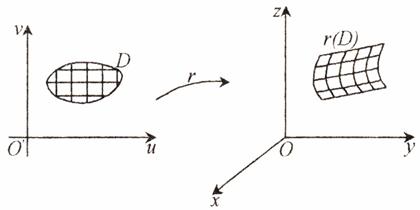
Fig. 2.2
Exemple.
1) Suprafata de ecuatii parametrice
 ,
, ![]() ,
,
unde R > 0, are ca imagine octantul de sfera x2 + y2 + z2 = R2, x > 0, y > 0, z > 0.
2) Fie suprafata
![]() ,
, ![]() . Vom determina curbele de coordonate care trec prin punctul A(1, 3, 1). Punctul A are coordonatele curbilinii u
= 1, v = -1. Pentru u = 1, obtinem curba de ecuatii
parametrice
. Vom determina curbele de coordonate care trec prin punctul A(1, 3, 1). Punctul A are coordonatele curbilinii u
= 1, v = -1. Pentru u = 1, obtinem curba de ecuatii
parametrice

![]()
deci curba de coordonate este dreapta care
trece prin punctul A, de vector
director ![]() Analog,
pentru v = -1, se obtine curba
Analog,
pentru v = -1, se obtine curba
 ,
, ![]()
sau

deci curba de coordonate este intersectia unui cilindru parabolic cu un plan.
3) Suportul suprafetei de ecuatii parametrice
 ,
, ![]() ,
,
unde R > 0, este cilindrul circular drept de raza R, a carui axa de simetrie este axa Oz, 'deschis', adica fara dreapta perpendiculara pe planul xOy, in punctul (R, 0, 0).
Reteaua liniilor de coordonate consta din dreptele 'verticale' u = const. si din cercurile 'orizontale' v = const.
4) Fie
 ,
, ![]() ,
,
ecuatiile parametrice ale unei curbe situate in planul xOy, care nu intersecteaza axa Oz. Oz, se obtine suprafata de rotatie, de ecuatii parametrice
![]()
Deoarece ![]() ,
, ![]() , rezulta ca
, rezulta ca ![]() , deci panza parametrizata care defineste suprafata este
neteda. Spre exemplu, cilindrul circular drept, de raza R, cu axa de simetrie Oz,
este suprafata de rotatie obtinuta prin rotirea dreptei de ecuatii
, deci panza parametrizata care defineste suprafata este
neteda. Spre exemplu, cilindrul circular drept, de raza R, cu axa de simetrie Oz,
este suprafata de rotatie obtinuta prin rotirea dreptei de ecuatii
![]() ,
, ![]() ,
,
iar sfera cu centrul in origine si de raza R se obtine prin rotirea cercului de ecuatii
![]() ,
, ![]() .
.
Suprafata de rotatie obtinuta prin rotirea curbei de ecuatii
![]() ,
, ![]() ,
,
se numeste catenoid (fig. 2.3), iar suprafata de rotatie obtinuta prin rotirea curbei de ecuatii
 ,
, ![]()
se numeste pseudosfera (fig. 2.4).
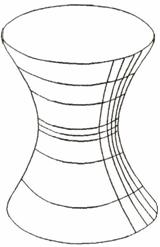
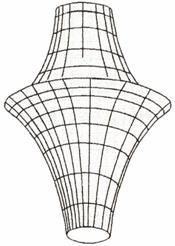
Fig. 2.3 Fig 2.4
2. Reprezentare explicita
Fie ![]() un domeniu si
un domeniu si ![]() o functie de clasa C1. Graficul lui f, adica multimea
o functie de clasa C1. Graficul lui f, adica multimea
![]()
este imaginea panzei parametrizate simple ![]() . Ecuatiile
parametrice ale panzei fiind
. Ecuatiile
parametrice ale panzei fiind
 , (u, v)
I D
, (u, v)
I D
rezulta ![]() , r(D)
= G, aplicatia r : D → G fiind bijectiva. este clar ca G este imaginea suprafetei de
reprezentant (r, D). Spunem
ca aceasta suprafata este definita
explicit prin ecuatia.
, r(D)
= G, aplicatia r : D → G fiind bijectiva. este clar ca G este imaginea suprafetei de
reprezentant (r, D). Spunem
ca aceasta suprafata este definita
explicit prin ecuatia.
z = f(x, y), (x, y) I D (2.3)
In acest caz, corespondenta
dintre punctele suprafetei si punctele unei anumite regiuni din ![]() se obtine proiectand ortogonal suprafata pe
planul xOy.
se obtine proiectand ortogonal suprafata pe
planul xOy.
Exemplu.
Paraboloidul eliptic sau paraboloidul hiperbolic de ecuatii carteziene ![]() ,
respectiv,
,
respectiv, ![]() , sunt
suprafete definite explicit.
, sunt
suprafete definite explicit.
Observatie.
In mod analog se trateaza suprafetele definite explicit prin ecuatiile
x = x(y, z), y = y(x,
z). De exemplu, suprafata de ecuatie x = y2
este un cilindru parabolic, iar suprafata de ecuatie ![]() este un paraboloid eliptic, avand axa Oy ca axa de simetrie.
este un paraboloid eliptic, avand axa Oy ca axa de simetrie.
3. Reprezentare implicita
Fie I ![]() o multime deschisa si F :
o multime deschisa si F : ![]() o functie de clasa C1. Vom preciza sensul in care multimea
o functie de clasa C1. Vom preciza sensul in care multimea
![]() (2.4)
(2.4)
este imaginea unei suprafete.
Teorema 2.1. Fie M0(x0, y0, z0) I S. Daca
gradF(x0, y0,
z0) = ![]() (2.5)
(2.5)
atunci exista o vecinatate W a punctului M , astfel incat S ∩ W sa fie imaginea unei suprafete.
Definitie.
Daca, de exemplu, atunci, conform teoremei functiilor implicite, exista o
vecinatate U a punctului (x0, y0), o vecinatate V
a punctului z0 si o
functie z : U → V, z I C (U), astfel incat F((x, y,
z(x,
y)) = 0, (x, y) I U. Notand W = U V, rezulta ca S ∩ W este imaginea
suprefetei definite de panza parametrizata ![]()
![]()
In acest caz spunem ca suprafata este definita implicit prin ecuatia carteziana
![]() (2.6)
(2.6)
Un punct M0(x0, y0, z0) I S in care este indeplinita conditia (2.5) se numeste punct regulat al suprafetei. Punctul M0 se numeste singular daca
![]() (2.7)
(2.7)
Astfel, in cazul sferei de ecuatie x2 + y2 + z2 = 3, sistemul (2.7) admite solutia (0, 0, 0). Originea nu se afla insa pe sfera, deci toate punctele sferei sunt regulate.
Daca functia F este algebrica, adica este functie polinomiala in x, y, z, atunci suprafata reprezentata de ecuatia (2.6) se numeste suprafata algebrica. De exemplu, cuadricele sunt suprafetele algebrice de ordinul al doilea, dar suprafata definita de ecuatia y = xtgz nu este algebrica.
Exemplu.
Sfera cu centrul in punctul A(a, b,
c) si de raza R are ecuatia carteziana ![]() . Este o
suprafata definita implicit. De asemenea, dintre cuadricele pe ecuatia redusa
(raportata la reperul dat de axele de simetrie), elipsoizii, hiperboloizii sunt
suprafete definite implicit.
. Este o
suprafata definita implicit. De asemenea, dintre cuadricele pe ecuatia redusa
(raportata la reperul dat de axele de simetrie), elipsoizii, hiperboloizii sunt
suprafete definite implicit.
Pentru inceput, prezentam cateva consideratii privind curbele aflate pe o suprafata.
Curba de reprezentant (I, r1) se afla pe suprafata de reprezentant (D, r), daca
r1(I) Ì r(D). Sa consideram o
curba pe suprafata . Daca x = x(t), y
= y(t), z = z(t)
sunt ecuatiile parametrice ale curbei, iar x
= x(u, v), y = y(u, v),
z = z(u, v) sunt ecuatiile parametrice ale suprafetei, atunci, din ecuatiile
x(t)
= x(u, v), y(t)
= y(u, v), z(t)
= z(u, v), putem determina u si v
ca functii de t. Intr-adevar,
conditia ![]() implica, de exemplu, ca
implica, de exemplu, ca  , ceea
ce asigura ca sistemul x = x(u,
v), y = y(u, v)
se poate rezolva in raport cu u si v. Asadar, o curba aflata pe suprafata S este imaginea unei curbe plane de
ecuatii
, ceea
ce asigura ca sistemul x = x(u,
v), y = y(u, v)
se poate rezolva in raport cu u si v. Asadar, o curba aflata pe suprafata S este imaginea unei curbe plane de
ecuatii
![]()
In consecinta, o curba aflata pe suprafata va avea ecuatia vectoriala
![]() (3.1)
(3.1)
In particular, liniile de coordonate determinate de punctul (u0, v0) I D au ecuatiile
![]() (3.2)
(3.2)
respectiv
![]() (3.3)
(3.3)
unde (u0 + t, v0) I D t I I, (u0, v0 + t) I D t I J. Este clar ca 0 I I I J
Fie o suprafata parametrizata de clasa C1, S imaginea sa si M0 I S
Definitie. Se numeste plan tangent la suprafata in punctul M planul care trece prin M0 cu proprietatea ca unghiul dintre acest plan si secanta care trece prin punctul M0 si printr-un punct oarecare M1 I S tinde la zero, cand punctul M1 tinde catre M0 (fig. 3.1).
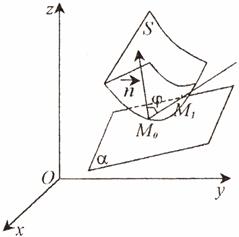
Fig. 3.1
Sa presupunem mai intai ca suprafata este definita explicit de ecuatia
z = z(x, y), (x, y) I D.
Vom arata ca, daca functia z este diferentiabila in punctul (x0, y0), atunci exista un plan tangent al graficului S al functiei z.
Fie M0, M1
I S, M0(x0,
y0, z0), M1(x, y,
z), unde z0 = z(x0, y0), z = z(x,
y). Notam ![]() . Cum z este diferentiabila, rezulta ca
. Cum z este diferentiabila, rezulta ca
 (3.4)
(3.4)
unde ![]()
![]() , iar γ si β sunt infiniti mai mici cand
, iar γ si β sunt infiniti mai mici cand
x y
Sa privim cu atentie ecuatia
z - z0 = A(x - x0) + B(y - y0)
Este ecuatia unui plan care trece prin punctul (x0, y0, z0)
si de vector normal ![]() . Vom
demonstra ca planul este tangent la suprafata in punctul M0.
. Vom
demonstra ca planul este tangent la suprafata in punctul M0.
Pentru a demonstra aceasta, este
suficient sa aratam ca unghiul φ dintre normala ![]() la planul si secanta M0M1 tinde la
la planul si secanta M0M1 tinde la ![]() cand M0.
Este cunoscut ca
cand M0.
Este cunoscut ca

Din (3.4) rezulta ca
![]()
Atunci
In consecinta, ![]() , adica
, adica ![]() , deci ecuatia planului tangent la suprafata S in punctul M0(x0,
y0, z0) este
, deci ecuatia planului tangent la suprafata S in punctul M0(x0,
y0, z0) este
![]() (3.5)
(3.5)
Sa presupunem acum ca suprafata este definita prin ecuatiile parametrice (2.1).
Ne propunem sa scriem ecuatia planului tangent intr-un punct de coordonate curbilinii u si v al acestei suprafete.
Deoarece ![]() ,
folosind teorema functiilor implicite, se poate demonstra ca intr-o anumita
vecinatate a acestui punct, suprafata este graficul unei functii
diferentiabile. Conform delor de mai sus, in acest punct exista un plan tangent
la suprafata. Din definitia planului tangent rezulta ca tangenta in punctul M0 de coordonate curbilinii u, v,
la orice curba de pe suprafata care trece prin M0, se afla in planul tangent la suprafata in M0. Vectorii
,
folosind teorema functiilor implicite, se poate demonstra ca intr-o anumita
vecinatate a acestui punct, suprafata este graficul unei functii
diferentiabile. Conform delor de mai sus, in acest punct exista un plan tangent
la suprafata. Din definitia planului tangent rezulta ca tangenta in punctul M0 de coordonate curbilinii u, v,
la orice curba de pe suprafata care trece prin M0, se afla in planul tangent la suprafata in M0. Vectorii ![]()
![]() ,
tangenti la curbele de coordonate determinate de punctul (u, v), se afla in planul
tangent in M0. Cum
,
tangenti la curbele de coordonate determinate de punctul (u, v), se afla in planul
tangent in M0. Cum ![]() , rangul
matricei
, rangul
matricei
este egal cu 2, deci ![]()
![]() sunt vectori
directori ai planului tangent la suprafata in M0 (fig. 3.2).
sunt vectori
directori ai planului tangent la suprafata in M0 (fig. 3.2).
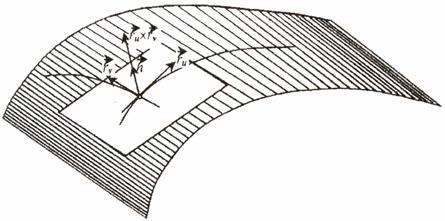
Fig. 3.2
In consecinta, ecuatia planului tangent in punctul de coordonate (x(u, v), y(u, v), z(u, v)) este
 (3.6)
(3.6)
daca suprafata este definita implicit de ecuatia F(x, y, z) = 0, cum intr-un punct (x0, y0, z0) al suprafetei
din (3.5) rezulta ca, in acest caz, ecuatia planului tengent este
![]()
Fie o suprafata de reprezentant (D, r) si M = r(u, v).
Definitie.
Vectorul ![]() se numeste vector
tangent la suprafata in punctul M daca exista o curba de clasa C1
de reprezentant (I, ), situata pe si un punct t I I astfel incat (t)
= M si
se numeste vector
tangent la suprafata in punctul M daca exista o curba de clasa C1
de reprezentant (I, ), situata pe si un punct t I I astfel incat (t)
= M si ![]() (fig. 3.3).
(fig. 3.3).
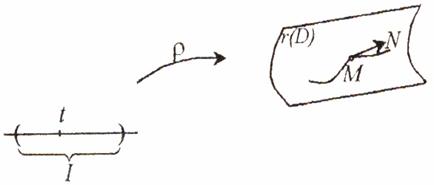
Fig. 3.3
Asadar, ![]() este vector-viteza la o curba situata pe
suprafata , trecand prin M.
este vector-viteza la o curba situata pe
suprafata , trecand prin M.
Multimea vectorilor tangenti la suprafata in punctul M se numeste spatiul tangentei la suprafata in punctul M si se noteaza TM
Fie acum liniile de coordonate ce trec prin M. Tinand seama de (3.2), (3.3), acestea sunt date de ecuatiile
![]()
![]()
Atunci (0) = M,
![]() (0) = M,
, deci
(0) = M,
, deci ![]()
![]() I TM . Deoarece
I TM . Deoarece ![]()
![]() ¹
¹ ![]() , rezulta
ca vectorii
, rezulta
ca vectorii ![]() si
si ![]() sunt liniar independenti. Acesti vectori se
numesc vectori-viteze partiale si
sunt tangenti la liniile de coordonate. Cu aceste notatii, vom demonstra
urmatoarea teorema.
sunt liniar independenti. Acesti vectori se
numesc vectori-viteze partiale si
sunt tangenti la liniile de coordonate. Cu aceste notatii, vom demonstra
urmatoarea teorema.
Teorema 3.1. Spatiul tangent TM este un spatiu vectorial real de dimensiune 2.
Demonstratie. Este suficient sa demonstram ca TM coincide cu subspatiul vectorial W, generat de ![]() si
si ![]() . Mai
intai vom arata ca TM Ì W. Fie
. Mai
intai vom arata ca TM Ì W. Fie ![]() I TM
I TM
Exista o curba de clasa C1 de reprezentant (I, ), situata pe si un punct t I I astfel incat (t) = M
si ![]() .
Conform (3.1),
.
Conform (3.1), ![]() , t I I. Atunci
, t I I. Atunci ![]() I W. Reciproc, daca
I W. Reciproc, daca ![]() I W, atunci
I W, atunci ![]()
![]() . Punand
(t) = r(u + t, v
+ bt),
avem (0) = M si
. Punand
(t) = r(u + t, v
+ bt),
avem (0) = M si ![]() , adica
, adica ![]() I TM . Asadar, TM W. Deoarece W admite baza
I TM . Asadar, TM W. Deoarece W admite baza ![]() ,
rezulta ca
,
rezulta ca ![]() TM
TM
Observatie. Din teorema 3.1 rezulta ca vectorii ![]() si
si ![]() formeaza o baza in spatiul tengent la suprafata
in punctul M. Fie
formeaza o baza in spatiul tengent la suprafata
in punctul M. Fie ![]() I TM Atunci
I TM Atunci ![]() . Vectorul
. Vectorul ![]() este coliniar cu
vectorul
este coliniar cu
vectorul
![]()
unde du = u'(t)dt, dv = u'(t)dt, care se afla in TM si are cooronatele du si dv. In consecinta, putem gandi o
directie in spatiul tangent ca fiind data de un vector de forma ![]()
Fie ![]() un punct al unei suprafete
un punct al unei suprafete
Definitie. Se numeste normala la suprafata in punctul M dreapta care trece prin M si perpendiculara pe planul tengent la in M. Se numeste vector normal la in punctul M orice vector nenul coliniar cu normala in M.
Presupunem ca o anumita vecinatate a punctului M este data de ecuatia vectoriala ![]() , astfel incat
vectorii
, astfel incat
vectorii ![]() si
si ![]() sa fie necoliniari in M. Este clar ca
sa fie necoliniari in M. Este clar ca ![]()
![]() este un vector normal la suprafata
este un vector normal la suprafata
Vectorul
 (3.8)
(3.8)
se numeste versorul normalei la suprafata in punctul M.
Tinand seama de (3.7), in cazul suprafetelor definite implicit de ecuatia F(x, y, z) = 0, un vector normal in punctul M0(x0, y0, z0) este
![]()
adica
![]()
Problema rezolvata. Sa se scrie ecuatia planului tangent si sa se gaseasca versorul normalei la suprafata in punctele indicate:
![]() , A(2, 3, 2);
, A(2, 3, 2);
![]() , A(u
= 2, v = 0);
, A(u
= 2, v = 0);
3) x2 + Y2 + z2 = a2, A(x0, y0, z0);
![]()
Solutie.
1) In acest caz ![]() .
Folosind (3.5), rezulta ca ecuatia planului tangent este 3x + 2y - 3z - 6 = 0. Versorul normalei la
suprafata este
.
Folosind (3.5), rezulta ca ecuatia planului tangent este 3x + 2y - 3z - 6 = 0. Versorul normalei la
suprafata este ![]()
![]()
![]() , deci
, deci ![]() .
Folosind (3.6), ecuatia planului tangent este 2x - 2y - z = 0, iar versorul normalei la
suprafata este
.
Folosind (3.6), ecuatia planului tangent este 2x - 2y - z = 0, iar versorul normalei la
suprafata este ![]()
3) Deoarece punctul se afla pe
suprafata, rezulta ca ![]() . Din
formula (3.7), cu F(x, y,
z) = x2 + y2
+ z2 - a2, obtinem ecuatia planului
tangent x0(x - x0)
+ y0(y - y0) + z(z
- z0) = 0, care se mai
scrie xx0 + yy0 + zz0 - a2
= 0. Se observa ca ecuatia planului tangent se poate obtine direct prin
dedublare. Versorul normalei la suprafata in punctul A este
. Din
formula (3.7), cu F(x, y,
z) = x2 + y2
+ z2 - a2, obtinem ecuatia planului
tangent x0(x - x0)
+ y0(y - y0) + z(z
- z0) = 0, care se mai
scrie xx0 + yy0 + zz0 - a2
= 0. Se observa ca ecuatia planului tangent se poate obtine direct prin
dedublare. Versorul normalei la suprafata in punctul A este  , unde
, unde ![]() este vectorul de pozitie al punctului A.
este vectorul de pozitie al punctului A.
4) In acest caz ![]()
![]() .
Folosind (3.7), ecuatia planului tangent este
.
Folosind (3.7), ecuatia planului tangent este ![]()
Orientarea unei suprafete
Fie o suprafata parametrizata simpla, de clasa c1, (D, r) un reprezentant al sau si S imaginea suprafetei (S = r(D)). Pentru orice punct M I S exista si este unic un punct (u,
v) I D astfel incat M = r(u, v).
In punctul M exista doi versori
normali la suprafata, anume ![]() , unde
, unde

Observatie. Daca (D1, r1)
este un alt reprezentant al suprafetei, deci (D1, r1)
~ (D, r) si
S = r1(D1),
fie l : D → D1
un difeomorfism cu jacobianul strict pozitiv, r = r1 ◦
l si (ξ l(u, v). Se poate arata ca
deci versorul normal nu depinde de parametrizarea aleasa.
Fie, acum, V3 spatiul vectorilor liberi normat cu norma obisnuita a
vectorilor. Notam cu S3
sfera unitate din V3,
adica ![]()
Definitie.
Suprafata se numeste orientabila daca functia : S → S3, ![]() , este
continua. Functia continua se numeste orientarea directa ('de la u
la v') pe , iar functia continua : S → S3,
, este
continua. Functia continua se numeste orientarea directa ('de la u
la v') pe , iar functia continua : S → S3, ![]() , se
numeste orientarea inversa ('de
la v la u') pe
, se
numeste orientarea inversa ('de
la v la u') pe
Punctele M de pe suprafata ,
impreuna cu versorii asociati prin ![]() formeaza o fata
a suprafetei , iar punctele M impreuna cu versorii asociati prin
formeaza o fata
a suprafetei , iar punctele M impreuna cu versorii asociati prin ![]() )
formeaza o alta fata a suprafetei
)
formeaza o alta fata a suprafetei
F ![]()
si
F ![]()
Asadar, o suprafata orientabila are exact doua fete.
Exemplu.
In cazul sferei de ecuatia x2
+ y2 + z2 = R2, orientarea directa se poate defini prin versorul
normalei exterioare  , iar
orientarea inversa se poate defini prin
, iar
orientarea inversa se poate defini prin 
![]() fiind vectorul de pozitie al punctului M. Asadar sfera este o suprafata cu doua
fete (fig. 3.4). Elipsoidul si hiperboloidul cu o panza sunt, de asemenea,
suprafete cu doua fete.
fiind vectorul de pozitie al punctului M. Asadar sfera este o suprafata cu doua
fete (fig. 3.4). Elipsoidul si hiperboloidul cu o panza sunt, de asemenea,
suprafete cu doua fete.
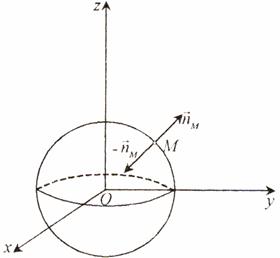
Fig. 3.4
Fie o suprafata de clasa C1, avand ecuatia vectoriala
![]() , (u, v)
I D (4.1)
, (u, v)
I D (4.1)
Presupunem ca ![]() (u, v) I D. Fie P = r(u, v).
Sa consideram o curba pe suprafata , care trece prin P. Dupa
cum este cunoscut, suportul acestei curbe este imaginea unei curbe plane de
ecuatii
(u, v) I D. Fie P = r(u, v).
Sa consideram o curba pe suprafata , care trece prin P. Dupa
cum este cunoscut, suportul acestei curbe este imaginea unei curbe plane de
ecuatii
u = u(t), v = v(t), t I [t0, t1],
curba avand ecuatia vectoriala
![]() (4.2)
(4.2)
Atunci
![]() (4.3)
(4.3)
Definitie. Prima forma
fundamentala (a lui Gauss) a suprafetei , in
punctul P, este, prin definitie, forma patratica I : TP ![]()
![]() (4.4)
(4.4)
Tinand seama de (4.3), rezulta ca
![]() (4.5)
(4.5)
Asadar, prima forma fundamentala
a unei suprafete este o forma patratica in variabile du si dv si se mai
noteaza cu I(du, dv). Prin urmare, ![]() . Mai
mult, aceasta forma patratica este pozitiv definita, deci I(du, dv) du, dv si I(du, dv) = 0 daca si numai
daca
. Mai
mult, aceasta forma patratica este pozitiv definita, deci I(du, dv) du, dv si I(du, dv) = 0 daca si numai
daca
du = dv = 0. Intr-adevar, daca ![]() , atunci
, atunci
![]() . Daca du si dv nu se anuleaza simultan, rezulta ca
. Daca du si dv nu se anuleaza simultan, rezulta ca ![]() si
si ![]() sunt coliniari, ceea ce contrazice ipoteza ca
sunt coliniari, ceea ce contrazice ipoteza ca ![]()
![]() ¹
¹ ![]() Atunci du
= dv = 0.
Atunci du
= dv = 0.
Introducem acum notatiile lui Gauss:
![]() (4.6)
(4.6)
deci
 (4.7)
(4.7)
Atunci, (4.5) se scrie sub forma
![]() (4.8)
(4.8)
Coeficientii E
= E(u, v), F = F(u, v),
G = G(u, v) se numesc coeficientii
primei forme fundamentale a suprafetei , in punctul P. Matricea formei
patratice I in baza ![]() a spatiului tangent la suprafata in punctul P, este
a spatiului tangent la suprafata in punctul P, este ![]() . Pentru aceasta,
este suficient sa observam ca forma biliniara asociata (polara) formei patratice
I este forma biliniara simetrica ψ TP TP
. Pentru aceasta,
este suficient sa observam ca forma biliniara asociata (polara) formei patratice
I este forma biliniara simetrica ψ TP TP ![]()
![]() . Atunci
. Atunci ![]() , unde
, unde ![]()
![]()
In acest mod pentru o suprafata data de ecuatia (4.1), prima forma fundamentala a lui este data de (4.8), unde coeficientii E, F, G se calculeaza folosind (4.6) sau (4.7).
Pentru suprafete definite explicit de ecuatia z = z(x, y), (x, y) I D, folosind notatiile lui Monge,
![]()
gasim
![]()
Exemple.
1) In cazul sferei de ecuatie
vectoriala ![]()
![]()
![]() .
Rezulta E = R2, F = 0, G = R2sin2u, deci
.
Rezulta E = R2, F = 0, G = R2sin2u, deci
I(du, dv) = R2(du2 + sin2udv2)
2) In cazul planului ![]() ,
,
(u, v) I ![]()
![]()
![]() , deci
, deci ![]()
![]()
![]() .
Asadar,
.
Asadar,
![]()
Folosind prima forma fundamentala a unei suprafete, putem calcula lungimea unui arc de curba aflata pe suprafata precum si unghiul dintre doua curbe aflate pe suprafata.
Sa consideram curba de ecuatie (4.2), aflata pe suprafata . Este cunoscut ca lungimea L a arcului curbei data de (4.2) este data de formula
L  (4.9)
(4.9)
Cum ![]() , rezulta ca:
, rezulta ca:
L  (4.10)
(4.10)
Putem astfel calcula lungimile arcelor de curba situate pe suprafata.
Lungimea s(t) a arcului dintre t0 si un punct curent t I [t0, t1] este
L 
![]()
relatia care se mai poate scrie sub forma
![]() (4.11)
(4.11)
spunandu-se ca defineste metrica suprafetei
Fie acum C1 si C2 doua curbe aflate pe suprafata , care se intersecteaza in punctul P.
Definitie. Unghiul dintre curbele C si C2 aflate pe suprafata , care se intersecteaza in punctul P, se defineste ca fiind unghiul dintre directiile tangentelor in P la curbele C1 si C2.
Conform celor de mai sus, cele doua curbe sunt date de ecuatiile:
![]() , t I [t0,
t1],
, t I [t0,
t1],
![]() , t I τ τ
, t I τ τ
Fie ![]() si q unghiul dintre cele doua curbe. Vectorii
directori ai tangentelor la cele doua curbe sunt:
si q unghiul dintre cele doua curbe. Vectorii
directori ai tangentelor la cele doua curbe sunt:
![]()
![]()
Unghiul q dintre cei doi vectori este dat de formula
 (4.12)
(4.12)
Notand cu ![]()
![]()
![]()
![]() , aceasta formula
se mai scrie sub forma echivalenta
, aceasta formula
se mai scrie sub forma echivalenta
 (4.13)
(4.13)
coeficientii E, F, G calculandu-se in puntul P.
In acest fel, cunoasterea primei forme fundamentale a unei suprafete permite, prin formula (4.13), calculul masurii unghiului dintre doua curbe aflate pe suprafata.
Caz
particular. In cazul
curbelor de coordonate de pe o suprafata care trec prin punctul ![]() , deci curbele u = const., v = const., avem du = 0, δv De aceea, unghiul curbelor de
coordonate este
, deci curbele u = const., v = const., avem du = 0, δv De aceea, unghiul curbelor de
coordonate este
![]()
deci
![]() (4.14)
(4.14)
Daca f =
0, atunci ![]() , deci curbele de
coordonate sunt ortogonale.
, deci curbele de
coordonate sunt ortogonale.
Din (4.13) se obtine imediat conditia de ortogonalitate a doua curbe care se afla pe o suprafata:
![]() (4.15)
(4.15)
Probleme rezolvate.
1) Pe suprafata ![]() , se considera
triughiul curbiliniu ABC astfel: A se afla la intersectia curbelor u = 0, v = 0, B la intersectia
curbelor v = 0 si u + v
= 1, iar C la intersectia curbelor u = 0 si u + v = 1. Sa se
calculeze lungimile arcelor AB si AC precum si masurile unghiurilor A si C.
, se considera
triughiul curbiliniu ABC astfel: A se afla la intersectia curbelor u = 0, v = 0, B la intersectia
curbelor v = 0 si u + v
= 1, iar C la intersectia curbelor u = 0 si u + v = 1. Sa se
calculeze lungimile arcelor AB si AC precum si masurile unghiurilor A si C.
Solutie.
Coordonatele curbilinii ale punctelor A,
B, C sunt A(u = 0, v = 0), B(u = 0, v = 0), C(u = 0, v = 1). Deoarece ![]()
![]() , E = 1, F = 0, G = u2 + 1, deci I(du,
dv) = du2 + (u2
+ 1)dv2.
, E = 1, F = 0, G = u2 + 1, deci I(du,
dv) = du2 + (u2
+ 1)dv2.
Ecuatia curbei AB
este v = 0, deci dv = 0, I(du, dv)
= du2. Atunci ![]() . Ecuatia curbei BC este u + v = 1, deci du + dv
= 0, I(du, dv) = (u2 + 2)du2. Rezulta ca
. Ecuatia curbei BC este u + v = 1, deci du + dv
= 0, I(du, dv) = (u2 + 2)du2. Rezulta ca  . Deoarece u = 0, v = 0 sunt liniile de coordonate ce trec prin A si F = 0, conform
(4.14) cosA = 0, deci
. Deoarece u = 0, v = 0 sunt liniile de coordonate ce trec prin A si F = 0, conform
(4.14) cosA = 0, deci ![]() . Folosind (4.13),
rezulta ca
. Folosind (4.13),
rezulta ca  . Asadar
. Asadar ![]()
2) Sa se determine traiectoriile orogonale ale
familiei de curbe u = Cev situate pe suprafata ![]()
Solutie. In acest caz E = 2, F = 1, G = u2
+ 1. Din U = Cev
rezulta du = Cevdv,
deci
du = udv. Folosind (4.15), obtinem ca traiectoriile ortogonale curbelor
date au ecuatia diferentiala (2u + 1)δu + (u2
+ u + 1)δv = 0. Integrand, rezulta ln(u2 + u + 1) + v = lnC, deci traiectoriile ortogonale cautate
au ecuatiile u2 + u + 1 = Ce-v.
Mantionam ca la analiza matematica se stabileste ca aria unei suprafete se poate calcula cu formula
![]() (4.16)
(4.16)
Asadar, cunoscand prima forma fundamentala a unei suprafete putem calcula aria unei suprafete.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3352
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved