| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
PERFORMANTELE RECEPTORULUI GPS
1. SURSE DE EROARE, PRECIZIA MASURARII
SI ESTIMAREA POZITIEI UTILIZATORULUI SI A TIMPULUI
1.1. Discutie
Acuratetea cu care receptorul utilizat poate determina pozitia, sau viteza, sau sincronizarea cu sistemul de timp al GPS-ului, depinde de interactii complicate si de diversi factori. In general, performantele GPS-ului depind de calitatea masuratorilor de pseudodistanta si de triangulatie, precum si de datele efemeridelor satelitului. De exemplu, acuratetea cu care este cunoscut de catre utilizator offset-ul ceasului satelitului fata de timpul sistemului GPS sau precizia cu care sunt compensate erorile de propagare pe traiectul satelit-utilizator sunt importante.
Eroarea de acuratete a solutiei pozitie/timp determinata de GPS este exprimata fundamental ca produsul dintre factorul geometric si factorul de eroare al pseudodistantei. Eroarea solutiei GPS este data de urmatoarea formula:
(eroarea solutiei GPS) = (factorul geometric) (factorul eroare de pseudodistanta)
In general, aceasta se numeste scaderea preciziei (DOP -dilution of precision). In continuare se prezinta principalele surse ale erorilor in sistemul GPS atat pentru PPS cat si SPS.
Erorile de pseudodistanta
Efectele offset-elor ceasurilor receptorului si satelitului precum si numeroasele surse de erori afecteaza masurarea distantei geometrice satelit-utilizator. Semnalul satelitar intarzie datorita propagarilor prin atmosfera. De asemenea, reflexiile, propagarea pe cai multiple, SA si efectele hardware pot afecta timpul de propagare.
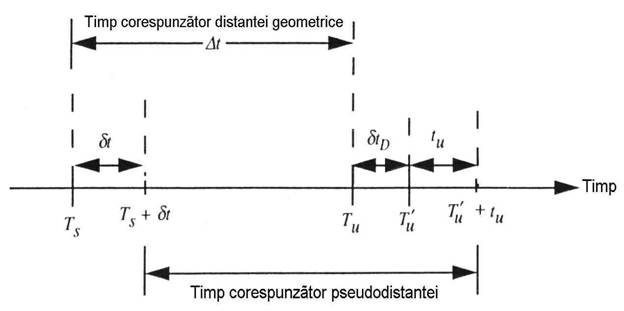
Figura 1. Timpii masurarii distantei
dtD = dtatm dtzgomot&rez dtp.c.m. dthw dtSA
unde,
dtatm = intarziere datorata atmosferei
dtzgomot&rez = zgomotul receptorului si rezolutia de offset
dtp.c.m. = offset-ul datorat propagarii pe mai multe cai (multipath offset)
dthw = offset-ul introdus de hardware-ul receptorului
dtSA = degradarea SA
Timpul echivalent pseudodistantei este egal cu diferenta intre timpul indicat de receptor cand semnalul a fost receptionat si timpul indicat de satelit la transmiterea semnalului. Timpii reprezentati in figura 1. sunt:
Dt = timpul echivalent distantei geometrice
Ts = timpul sistemului atunci cand semnalul pleaca de la satelit
Tu = timpul sistemului atunci cand ar trebui sa soseasca semnalul
la receptor fara dtD (teoretic)
Tu = timpul sistemului atunci cand soseste semnalul la receptor cu dtD
dt = decalajul(offset-ul) ceasului satelitului fata de sistemul de timp
(mai devreme - pozitiv, retardat (intarziat) - negativ)
tu = decalajul(offset-ul) ceasului receptorului fata de sistemul de timp
Ts dt = timpul indicat de ceasul satelitului atunci cand semnalul
paraseste satelitul
Tu'+tu timpul indicat de ceasul receptorului atunci cand semnalul
soseste la receptor
c = viteza luminii
Aceasta pseudodistanta r observata este:
r = c (Tu'+tu (Ts dt)] = c (Tu' -Ts) + c (tu dt) = c (Tu dtD -Ts) + c (tu dt)
r = r + c (tu dt + dtD) , unde r este distanta geometrica:
r = c (Tu -Ts
1.2.1. Eroarea de ceas a satelitului
Satelitii au ceasuri atomice de control incorporate pentru operatiunile de sincronizare care includ si generarea timpului emisia semnalului. Desi aceste ceasuri sunt foarte stabile, ele pot devia cu un dt pana la 1 msec fata de timpul sistemului GPS.(O deviatie de 1 msec se transpune intr-o eroare de pseudodistanta 300 km.). Marimile erorilor in determinarea distantelor introduse de catre erorile ceasului sunt de ordinul a 3.0m(1s). Statia principala de control (MCS - master control station) determina si transmite satelitilor corectia parametrilor ceasului pentru retransmiterea mesajului de navigatie. Aceasta corectie a parametrilor este implementata de catre receptor folosind un polinom de gradul doi:
dt = af0 af1(t - toc af2(t - toc Dtr
unde
af0 = abaterea sistematica a ceasului (sec)
af1 = deriva(drift-ul) ceasului (sec/sec)
af2 = deriva(drift-ul) frecventei (sec/sec2)
toc = timpul indicat de ceasul de referinta (sec)
t = timpul curent (sec)
Dtr = corectia datorata efectelor relativiste (sec)
Corectia Dtr compenseaza doar unul dintre cele trei efecte relativiste care se pot produce.
Atat timp cat parametrii de mai sus estimeaza aproape corect erorile de ceas actuale ale satelitului, mai raman cateva erori reziduale.
1.2.2. Predictia erorilor efemeridelor
Estimarea optimala a efemeridelor tuturor satelitilor este calculata si transmisa catre sateliti printr-un mesaj de date care consta in parametrii navigatiei pentru retransmiterea catre utilizator. Eroarea reziduala este un vector descris ca in figura. Marimea acestei erori este data proiectia erorii efective de pseudodistanta pe directia vectorului satelit-utilizator. Eroarea efectiva de pseudodistanta datorata erorilor reziduale este de ordinul a 4.2m(1s
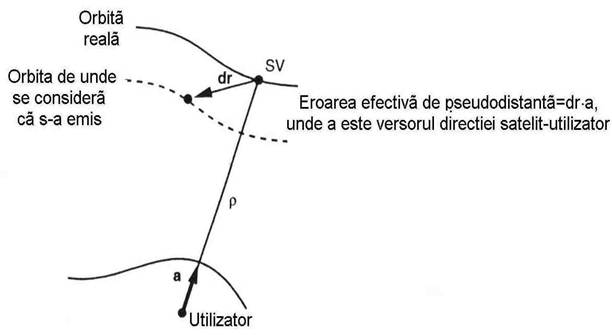
Figura 2. Erori datorate efemeridelor
1.2.3. Accesul limitat la precizie (SA-Selective Availability)
Singura sursa de eroare pentru utilizatorii SPS (sistemului standard de pozitionare) este SA . SA a fost introdusa intentionat de catre DOD (Departament of Defense) pentru a degrada solutiile navigatiei utilizatorilor. SA a fost implementat din Martie 25,1990. Degradarea este realizata prin manipularea datelor despre efemeridele satelitilor (componenta orbitala a erorii) si printr-o oscilatie de mica amplitudine peste semnalul de ceas al satelitului (componenta de ceas a erorii). Componenta orbitala a erorii este notata cu e iar componenta de ceas a erorii este notata cu d
Introducerea intentionata a erorilor asupra parametrilor efemeridelor are ca rezultat determinarea eronata a pozitiei satelitului utilizat. Datele emise despre efemeride contin 15 parametrii. Aceasta eroare putand fi indusa prin diferite cai. Eroarea efectiva de pseudodistanta este data de proiectia vectorului suma dintre eroarea reziduala si componenta orbitala a SA pe directia vectorului satelit-utilizator.
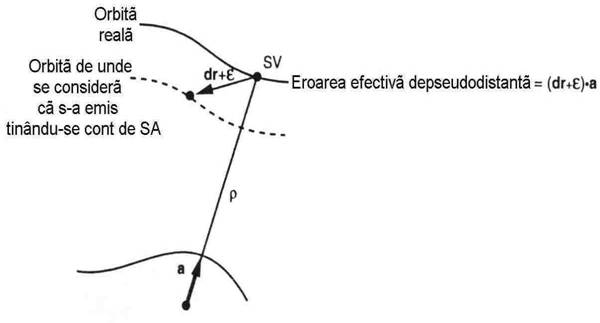
3. Efectul combinat al erorii orbitale SA si eroarea predictiei efemeridelor
1.2.4. Efectele relativiste
Ambele teorii ale relativitatii ale lui Einstein, restransa si generalizata sunt folosite in procesul de masurare a pseudodistantei. De exemplu, pentru ca observe un nivel al frecventei de 10.23 MHz satelitul trebuie sa ajusteze frecventa ceasului la 10.22999999545MHz.
Se tine cont de excentricitatea orbitei satelitului. Cand satelitul este la perigeu, viteza satelitului este mare iar potentialul gravitational mic - ambele cauzand incetinirea ceasului satelitului. Cand satelitul este la apogeu, viteza satelitului este mica iar potentialul gravitational mare - ambele facand ca ceasul satelitului sa mearga mai repede.
Acest efect poate fi compensat prin:
Dtr = Fe![]() sinEk
sinEk
unde
F = -4.442807633 10-10sec/m
E = excentricitatea orbitei satelitului
A = semiaxa mare a orbitei satelitului
Ek = anomalia de excentricitate a orbitei satelitului
Acest efect poate fi maxim de 70 nsec (21m in distanta). Corectia ceasului satelitului pentru acest efect relativist are ca rezultat estimarea mai precisa a timpului de transmisie catre utilizator.
Datorita rotatiei Pamantului in timpul transmisiei semnalului, eroarea relativista introdusa este data de efectul Sagnac.
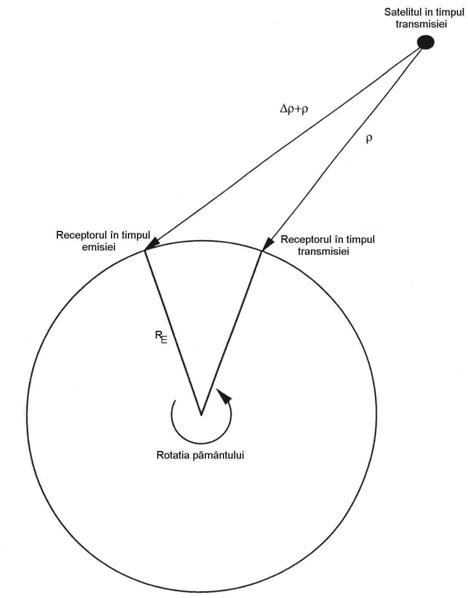
Figura 4. Efectul Sagnac
1.2.5. Efectul atmosferic
Viteza de propagare a undei poate fi exprimata in functie de indicele de refractie al mediului. Indicele de propagare este definit ca raportul dintre viteza de propagare in vid si cea din mediul respectiv ca in formula
![]() ,
,
pentru WGS-84, c = 299.792.458 m/sec.
Alte efecte mai sunt cele ionosferice si intarzierile troposferice.
1.2.6. Efectele propagarii multiple si umbririi
O eroare majora intalnita de catre receptor in procesul de masurare este propagarea pe cai multiple. Semnalul soseste la receptor pe mai multe cai datorate reflexiilor pe Pamant si pe unele obiecte.
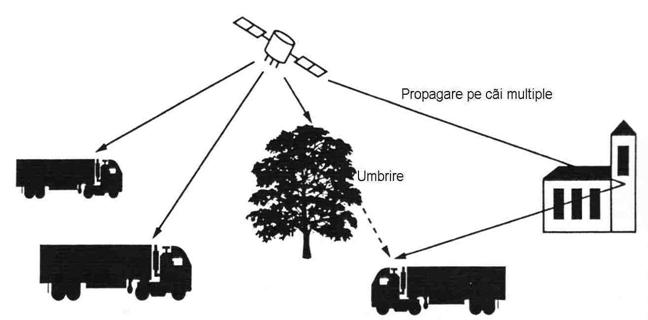
Figura 5. Efectele umbririi si propagarii pe cai multiple
Degradarea pseudodistantei este cauzata de distorsiunea data de corelatia la varf in prezenta semnalului indirect (semnalul reflectat).
Considerand M posibile reflexii, semnalul cu spectru imprastiat receptionat poate fi scris ca:
x(t)
= ![]() ai(t)p[t
- ti(t)]cos[wt + qi(t)]
ai(t)p[t
- ti(t)]cos[wt + qi(t)]
unde
- p(t) este codul PRN;
w frecventa purtatoarei tinand cont de deviatia Doppler;
- ai(t), ti(t), qi(t) amplitudinea si faza semnalului I dependente de timp.
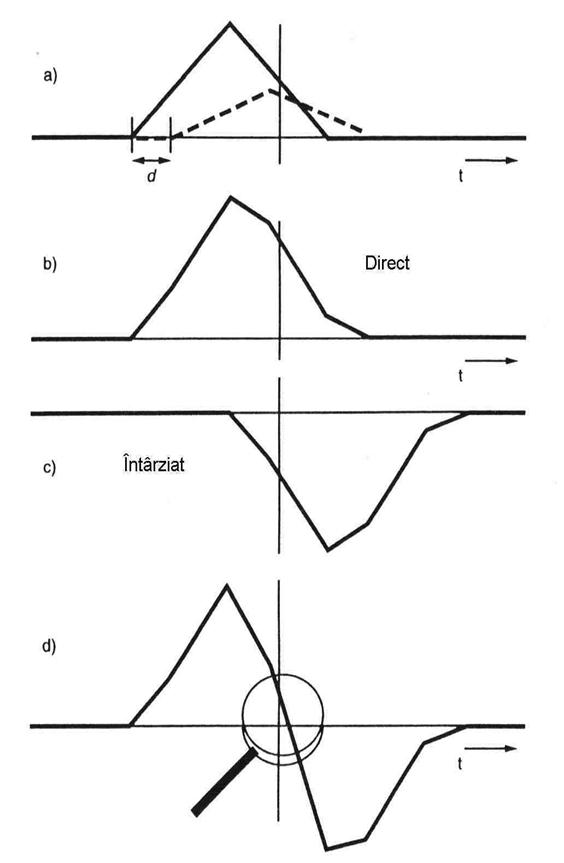
Figura 6. Semnalul compus in cazul codului sosit pe cai multiple
Efectul asupra purtatoarei fazei poate fi inteles pe urmatoarea reprezentare vectoriala:
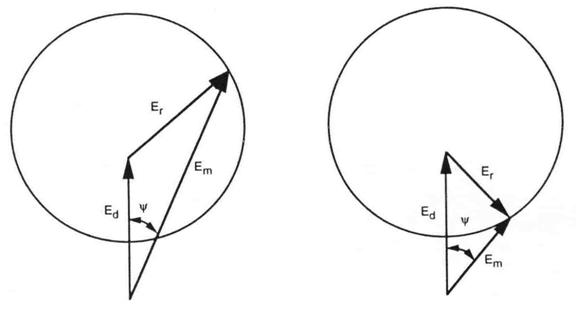
Figura Faza purtatoarei in cazul propagarii pe cai multiple
vectorul Ed este al semnalului direct
vectorul Em este suma vectorilor semnalului direct si reflectat
Pentru combaterea efectului propagarii pe cai multiple, importanta este alegerea si pozitionarea antenei.
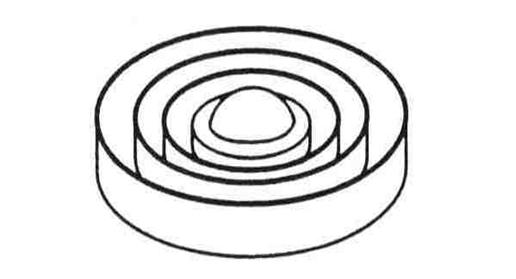
Figura 8. Antena-Choke Ring
1.3. Scaderea preciziei (DOP-Dilution of Precision)
Conceptul dispersiei preciziei se aplica si in GPS. In acest exemplu, un utilizator isi determina pozitia prin masuratori ale distantelor fata de doua puncte.
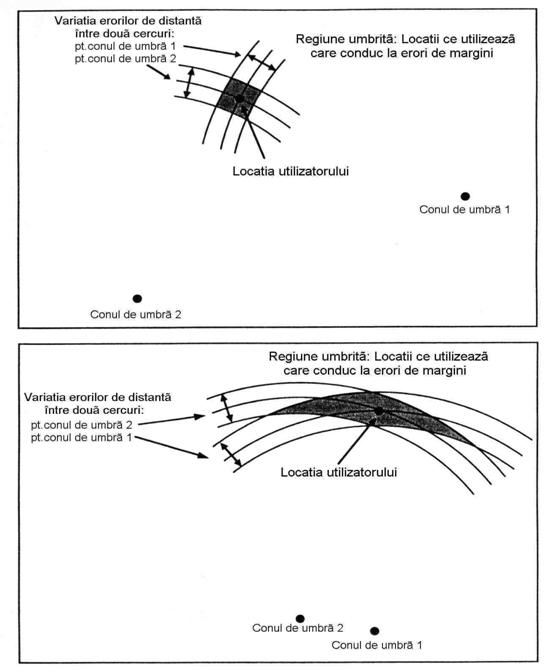
Figura 9. Geometria relativa si DOP (dilution of precizion)
a) DOP mic
b) DOP mare;
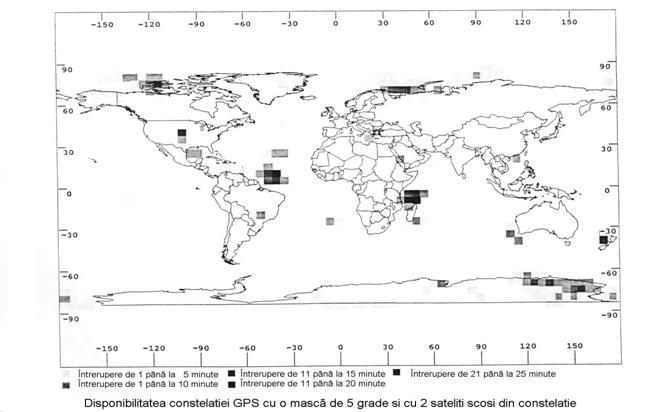
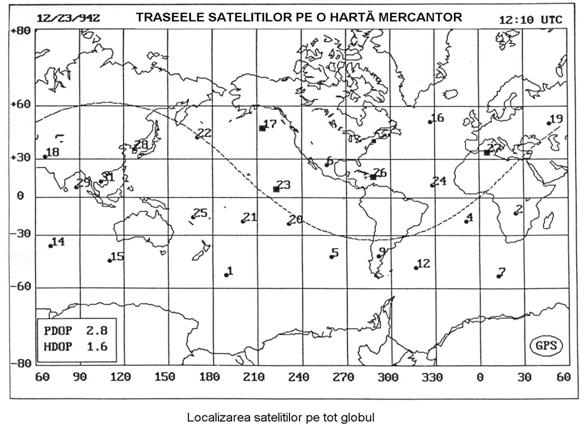
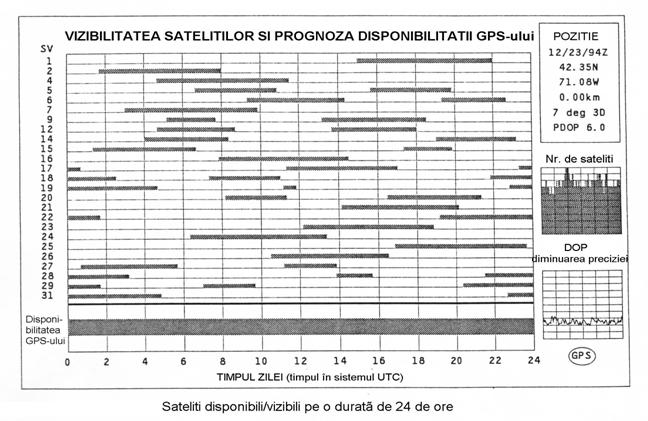
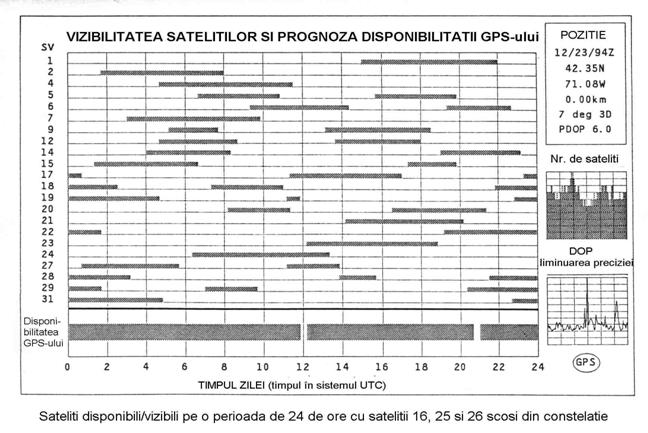
2. Disponibilitatea GPS-ca sistem
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2132
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved