| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Masina electrica ME
Constructia ei este analoaga celei a masinii sincrone cu magneti permanenti. In stator este plasata infasurarea ce contine cateva sectii (faze). Cel mai adesea, constructiile realizate pana in prezent sunt cu doua, trei sau patru sectii plasate in crestaturile circuitului magnetic din tole de otel electrotehnic sau pe polii aparenti.
In fig. 4.59 sunt prezentate doua forme de baza ale infasurarilor: deschise sau inchise. Excitatia motorului se realizeaza de magnetii permanenti din rotor. Numa-rul polilor, obisnuit este doi sau patru. Materialele utilizate sunt cu forta coercitiva mare - aliaje magnetice dure de tipul alnico (cunial), ferite si aliaje din metale rare.
Raspandire larga au obtinut constructiile cu magneti permanenti din ferite dure. Magnetii din metale rare au valoare inalta a fortei coercitive si inductie rema-nenta inalta (mai mult de doua ori mai inalta decat aceea a feritelor). Acesti indi-catori permit a se realiza motoare cu inductoare cu magneti din metale rare cu mo-ment in jur de 1,5 ori mai mare, putere de iesire de 2 ori mai mare, constante de timp de 2 ori respectiv 1,7 ori mai mici (mecanica si electrica) in comparatie cu cele ale inductoarelor din ferite.
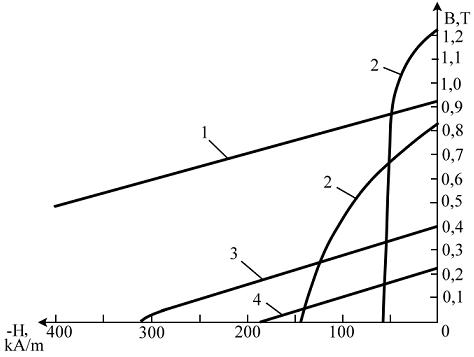
Proprietatile magnetice ale materialelor utilizate pentru magnetii permanenti se pot compara prin curbele de magnetizare, indicate in fig. 4.60 a pentru trei grupe tipice de materiale. Aliajele AlNiCO (aliaje cu fier, aluminiu, nichel, cobalt s.a. adaugate in proportii diferite) sunt reprezentate de curba 2. Curba 1 se refera la magneti din metale rare (aliaje cu samariu si cobalt sau neodiu, fier si bor). Curbele 3 si 4 reprezinta magneti permanenti din ferite (ceramice transformate din oxizi de fier si strontiu-curba 3; fier si bariu - curba 4).
a
Fig.4.60 Curbele de magnetizare pentru trei grupe tipice de materiale utilizate pentru magnetii permanenti: curba 1 pentru magneti din metale pe baza de pamanturi rare;
curba 2 pentru aliaje AlNiCO. Curbele 3 si 4 pentru magneti permanenti din ferite.
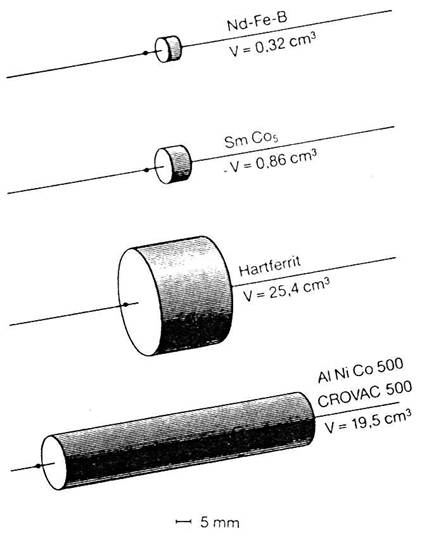
In fig.4.60 b este prezentata o comparatie demonstrativa a dimensiunilor magnetilor permanenti din diferite materiale, care excita acelasi camp magnetic pentru aceleasi marimi ale intrefierului. (0,1 T la 5 mm).
Dezavantajul magnetilor permanenti din aliaje cu metale magnetice dure este necesitatea de a se lua masuri impotriva demagnetizarii datorita campului magnetic al curentului indus (reactia curentului din indus). Se aplica urmatoarele masuri de baza impotriva acestui proces:
Ø limitarea la maxim a valorii minime a curentului indus;
Ø montarea pieselor polare din materialul magnetic moale (compact sau stantat) ca fluxul magnetic datorat curentului indus sa se inchida in principal prin ele.
b
Fig.8.40 Comparatie intre diferiti magneti permanenti din diferite materiale
ce excita acelasi camp magnetic pentru aceleasi marimi ale intrefierului.
Indicatorul de pozitie al rotorului (IPR)
Ca indicatori de pozitie a rotorului se utilizeaza convertoare optice (foto electrice), inductive s.a. Raspandita este aplicatia IPR cu elemente Hol (Hall) si cu transformatoare rotative (rezolvere).
Comutatorul electronic cu semiconductoare (CES)
Prin intermediul comutatorului electronic cu semiconductoare se realizeaza alimentarea si comanda motorului fara contacte, precum si reglarea turatiei. Reali-zarea se face cu utilizarea tranzistoarelor sau tiristorilor.
IPR asigura legatura necesara intre pozitia
fluxului magnetic al inductorului (rotorului) si fazorul t.m.m. a infasurarii
statorice. Aceasta se poate obtine prin alimentarea in serie a fazelor
infasurarii statorice de la CES in functie de unghiul de rotire al rotorului. La motorul fara perii cu numar
mic de faze nu este posibil ca in perioada unei rotatii sa se pastreze ![]() Aproximativ, el este apropiat de 900 pe timpul perioadei dintre
comutatii si depinde de procedeul comenzii la alimen-tare.
Aproximativ, el este apropiat de 900 pe timpul perioadei dintre
comutatii si depinde de procedeul comenzii la alimen-tare.
Principiul de functionare
Cel mai adesea, principiul de functionare se
explica prin intermediul con-structiei utilizate, in care rotorul este bipolar,
iar infasurarea statorului (indusului) este deschisa si consta din trei sectii.
Sectiile sunt conectate in stea cu punct comun de iesire scos afara. Blocul de
comanda a alimentarii schemei de la sursa de tensiune continua este simbolizat
prin CES. El se comanda de la indicatorul de pozitie al rotorului. IPR este compus din trei senzori
dispusi la 1200, care
realizeaza succesiv contactul cu sectorul de unghi ![]() , rotativ simultan cu inductorul.
, rotativ simultan cu inductorul.
In fig.4.61 a este indicat momentul initial al functionarii motorului. Pozitia
sectorului corespunde starii inductorului in care t.m.m. a lui Fe si t.m.m. a indusului Fa sunt decalate in spatiu cu
unghiul ![]() . In acest caz sectorul ce asigura legatura
intre contactele 0 si 1 si IPR alimenteaza numai sectia 1. Dupa rotirea
inductorului cu unghiul
. In acest caz sectorul ce asigura legatura
intre contactele 0 si 1 si IPR alimenteaza numai sectia 1. Dupa rotirea
inductorului cu unghiul ![]() fata de
starea initiala, sectorul conecteaza la iesirile 1-0-2 la CES. El asigura tensiunea de alimentare, la infasurarile 1 si 2 cand unghiul
fata de
starea initiala, sectorul conecteaza la iesirile 1-0-2 la CES. El asigura tensiunea de alimentare, la infasurarile 1 si 2 cand unghiul ![]() (fig4.61 b
(fig4.61 b
In figurile urmatoare (4.61 c, d,
e) sunt date variatiile unghiului
α pentru
pozitiile urmatoare ale rotorului rotit cu unghiuri multiple de 300. Diagrama referi-toare la
curentii ce trec prin sectiile 1, 2, 3 este prezentata in fig. 4.61 e. Ele sunt impulsuri unipolare si
corespund functionarii IPR cu unghiul ![]() si
schema comutatorului electronic semiconductor, utilizeaza spre exemplu trei
tranzistore.
si
schema comutatorului electronic semiconductor, utilizeaza spre exemplu trei
tranzistore.
Din fig. 4.61 se vede ca la aceasta
constructie a motorului fara contacte,
unghiul ![]() variaza
de la 600 la 1200. Aceasta inseamna ca
momentul obtinut are valoare variabila si contine o componenta alternativa.
variaza
de la 600 la 1200. Aceasta inseamna ca
momentul obtinut are valoare variabila si contine o componenta alternativa.
o
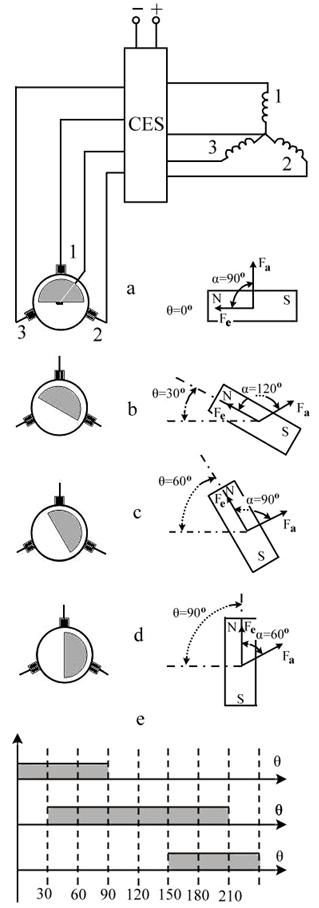
Fig.4.61 a) momentul initial de functionare al motorului; b) alimentarea infasurarilor 1 si 2 cand α=1200; c,d) variatiile unghiului α pentru urmatoarele pozitii ale rotorului, multiple de 300
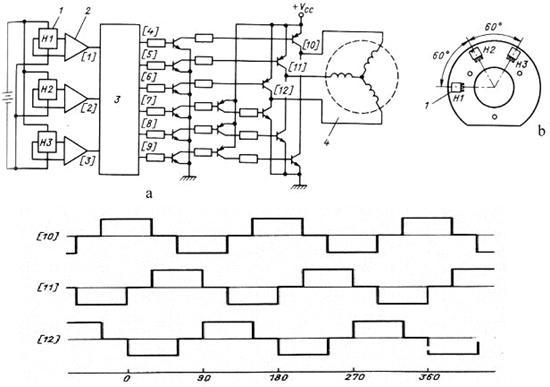
Fig.4.62 a) Schema instalatiei motorului utilizat in comanda tiparirii cu laser;
b) Diagramele curntilor ce trec prin cele trei infasurari cu punctele de intrare 10,11,12
Modificarea sensului de rotatie a rotorului se
poate obtine cu scheme supli-mentare de solutionare. Prin schimbari in CES
(exemplu schema cu sase tranzisto-re), se poate obtine variatia bipolara a curentilor prin
sectii. In functie de forma infasurarilor inchise sau deschise si de schema
surselor comandate se folosesc si
diferite IPR-sectoare cu unghiul ![]() sau alt
tip de senzori. Cei mai utili-zati sunt senzorii Hol (Hall), adesea
implementati in scheme integrate, prin
care se obtin semnale prelucrate.
sau alt
tip de senzori. Cei mai utili-zati sunt senzorii Hol (Hall), adesea
implementati in scheme integrate, prin
care se obtin semnale prelucrate.
Randamentul inalt al motorului se obtine cu infasurarea trisectionata, analoa-ga motoarelor trifazate de c.a. Acest gen de motor este folosit in comanda instala-tiilor de tiparire cu laser - fig.4.62. In schema semnalelor, pozitia rotorului se obti-ne de la trei convertoare Hol - H1, H2, H3 notate cu 1. Amplificatoarele de semnale de la senzorii Hol sunt notate cu 2, cu 3 este notata schema, ce genereaza semna-lele de comanda la tranzistoarele ce comanda infasurarile statorice ale motorului. Blocul motorului si infasurarile lui statorice sunt notate cu 4.
Sub schema de principiu sunt date diagramele curentilor din cele trei infasurari cu punctele de intrare 10, 11, 12. Ele stabilesc t.m.m., analog celor de la infasurarile trifazate statorice. Efectul obtinut consta in reducerea pulsatiilor mo-mentului electromagnetic. Prin utilizarea infasurarii indusului cu patru sectii se complica schema de comanda a alimentarii.
In multe cazuri practice sunt necesare motoare cu constructie simpla si nu in special cu comanda complicata fara cerinte severe asupra pulsatiilor momentului (exemplu la ventilatoare). Atunci se utilizeaza infasurari cu una si doua sectii (mo-nofazate si bifazate).
In fig. 4.63 sunt prezentate constructia statorului si rotorului si scheme de principiu ale motorului fara perii pentru ventilator. Constructia este cu rotor exte-rior din magnetii permanenti 1. In statorul 2 pe circuitul magnetic si pe polii cu piese polare se plaseaza sectiile infasurarii 3 a indusului (fig. 4.63 a). IPR este ele-ment Hol cu patru iesiri (doua de alimentare si doua pentru inregistrarea t.e.m. ob-tinute).
Schema poate fi integrata cu amplificator cu trei iesiri. Se plaseaza pe linia, perpendiculara pe axa polilor statorici si functioneaza la trecerea capatului senzo-rului peste magnetii permanenti cand genereaza tensiuni de sensuri opuse la Hol la schimbarea polaritatii magnetului permanent (fig. 4.63 b).
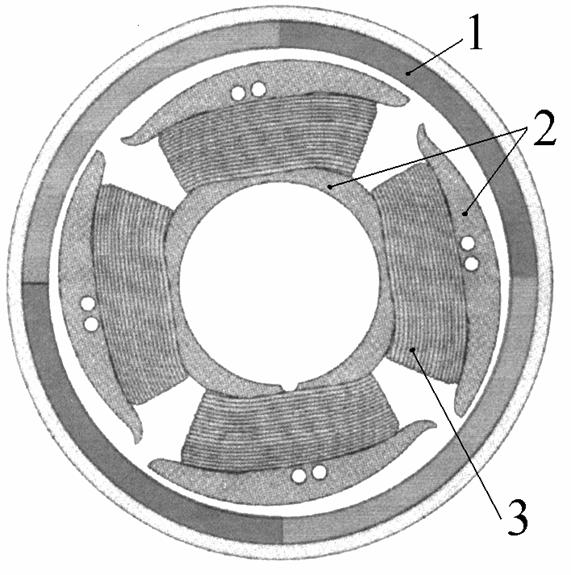
Fig.4.63 a) Constructia statorului si motorului fara perii, pentru ventilator.
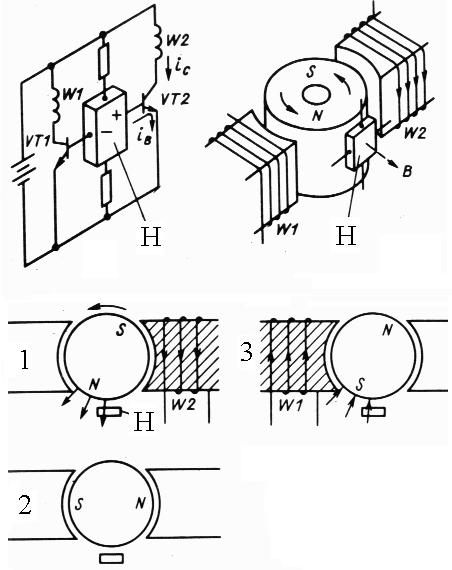
Fig.4.63 b) Schema integrata cu amplificator inglobat cu trei iesiri pentru motorul fara contacte.
Schemele 1 si 2 din fig. 4.63 c creaza campul magnetic pulsatoriu al infasura-rii indusului, care prin interactiune cu magnetul permanent determina aparitia mo-mentului pulsatoriu. Aceasta se poate explica prin fig. 4.63 b, unde sunt prezentate doua sectii w1 si w2, magnetul permanent din rotor si elementul Hol (1) plasat in axa neutra dintre poli.
Comanda tranzistoarelor din schema de alimentare se face prin tensiunea de iesire de la elementul Hol cand sunt aratate trei pozitii ale rotorului si alimentarii w1 si w2, determinata de IPR. Cand fluxurile magnetice ale infasurarilor si magne-tului permanent sunt defazate cu unghiul α>0, valoarea momentului se modifica in functie de α (pozitiile 1 si 3).
Daca ![]() (pozitia 2), momentul este nul. In pozitia 2,
tensiunea de iesire de la IPR este nula si infasurarile w1 si w2 nu se alimenteaza. Rotorul continua a se roti
si trece prin puncte moarte ale liniei neutrale datorita momentului de inertie.
(pozitia 2), momentul este nul. In pozitia 2,
tensiunea de iesire de la IPR este nula si infasurarile w1 si w2 nu se alimenteaza. Rotorul continua a se roti
si trece prin puncte moarte ale liniei neutrale datorita momentului de inertie.
De aceea la moment rezistent ridicat datorita frecarii, rotorul se poate frana sau nu se poate realiza pornirea motorului, daca rotorul este blocat in acea pozitie 2 (in punctul mort). Acest neajuns se inlatura prin masuri speciale.
Una dintre acestea este prezentata in fig. 4.63 a-piesele polare ale infasurarii indusului, sunt cu intrefier variabil fata de magnetul permanent. Cand inductorul este in rotor, polii pot fi ca in fig. 4.63 d.
In acest caz apare momentul reactiv, care pentru pozitia 2 tinde sa roteasca rotorul in pozitia determinata de reactanta cea mai mica a caii fluxului creat de magnetul permanent. Aceasta actiune fixeaza sfarsitul respectiv inceputul pozitiei rotorului dupa eliminarea alimentarii infasurarilor.
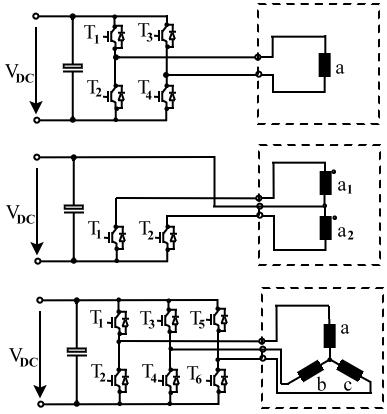
Fig.4.63 c) Scheme pentru crearea campului magnetic pulsatoriu
al infasurarii indusului motorului fara contacte.
Atunci cand prin infasurarile w1 si w2
trece curent, dependentele momentului electromagnetic ce actioneaza asupra
rotorului sunt curbele 1 si ![]() din fig.8.34 d. Punctele moarte ale acestui moment sunt semnalate de 3. Analog,
momentului reactiv de la masinile sincrone, la decuplarea infasurarii de
excitatie rotorul motorului este scos din pozitia fixa de actiunea momentului 2 si se va roti in
pozitia stabila (punctele 4).
din fig.8.34 d. Punctele moarte ale acestui moment sunt semnalate de 3. Analog,
momentului reactiv de la masinile sincrone, la decuplarea infasurarii de
excitatie rotorul motorului este scos din pozitia fixa de actiunea momentului 2 si se va roti in
pozitia stabila (punctele 4).
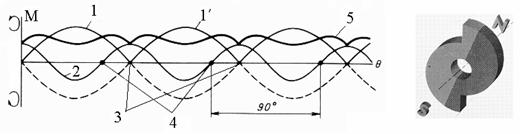
Fig.4.63 d) Dependentele (curbele 1,1) ale momentului electromagnetic ce actioneaza asupra rotorului la trecerea curentului prin infasurarile w1, w2.
Dupa alimentarea infasurarii de excitatie, comandata
de IPR, rotorul se ro-teste datorita momentului electromagnetic rezultant 5.
Acest moment este fara va-lori nule la modificarea unghiului de rotatie ![]() al rotorului.
al rotorului.
In fig. 4.63.c
, pentru comparatie este prezentata si examinata in fig. 4.61 a in-fasurarea trisectionata
(trifazata). Cu schema de comanda mai complicata a IPR se poate imbunatati
dependenta momentului de ![]() cand forma curentilor ce trec prin sectii, se
apropie de o sinusoida.
cand forma curentilor ce trec prin sectii, se
apropie de o sinusoida.
Utilizarea motoarelor fara perii se extinde in toate domeniile industriale si casnice. Numarul mare al acestor motoare cu diferite scheme si constructii se folo-seste in tehnica de calcul,in echipamentele de memorare si tiparire s.a., precum si in schemele de automatizare, ca motoare de executie.
Se extinde utilizarea motoarelor fara perii si in mijloacele de transport la instalatii auxiliare (servo-comanda hidraulica), dar si ca motoare de tractiune, ex. in automobile electrice mici, golfcare s.a.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2007
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved