| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Reglarea turatiei motoarelor de curent continuu - caracteristicile de reglare
Caracteristicile de reglare stabilesc proprietatile motoarelor sub aspectul re-glarii turatiei lor. Dintre aceste proprietati se retin:
Ø domeniul de reglare, care se stabileste prin
raportul dintre turatia maxi-ma si minima ![]() ;
;
Ø caracterul reglarii - lin sau in trepte.
Asupra caracteristicilor de reglare influenteaza de asemenea economicitatea reglarii sub aspectul investitiei echipamentelor si cheltuielilor de exploatare a aces-tora, simplitatea procesului de reglare s.a. Un motor de c.c. are caracteristici de reglare bune, cand este posibila efectuarea reglajului de turatie in mod lin si in domeniu larg cu pierderi minime.
Daca in infasurarea indusului se inseriaza un reostat cu rezistenta Rs (fig.4.33 a,b,c,d), ecuatia de echilibru a t.e.m. si caderilor de tensiune din infasura-rea indusului motorului de c.c. devine:
![]() (4.20)
(4.20)
Din ecuatia (2.20) rezulta ca:
 (4.21)
(4.21)
Din expresia (4.21) se observa, ca turatia n a motorului de c.c. se poate regla prin urmatoarele trei mijloace:
a) prin variatia rezistentei Rs a reostatului de reglaj;
b) prin variatia fluxului magnetic ![]() ;
;
c) prin variatia tensiunii de alimentare U;
In primul caz, in serie cu infasurarea indusului se conecteaza reostatul de re-glaj, care se dimensioneaza pentru regim de functionare de lunga durata, deoarece poate functiona timp nelimitat la turatie stabilita.
Din expresia (4.21) rezulta ca la cresterea valorii lui Rs turatia se reduce si invers. Cu cat Rs este mai mare, cu atat caracteristicile mecanice (de viteza) au caracter mai cazator. In fig.4.44 se prezinta caracteristica mecanica naturala (Rs=0) si doua caracteristici mecanice artificiale reostatice corespunzatoare rezistentelor Rs1 si Rs2>Rs1 ale reostatului de reglare din circuitul indusului motorului de c.c. cu excitatie paralela sau independenta.
Daca la arborele motorului exista momentul rezistent Mr constant ca marime si motorul functioneaza pe caracteristica mecanica naturala a sa, pentru Rs=0, turatia este n. Ea corespunde punctului de functionare A in care momentul motor se echilibreaza cu momentul rezistent (M=Ms).
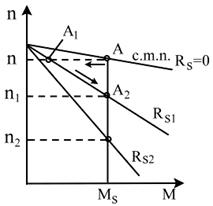
Fig.4.44 Caracteristica mecanica naturala (Rs=0) si doua caracteristici artificiale
reostatice corespunzatoare rezistentelor Rs1 si Rs2>Rs1, ale reostatului de pornire
din circuitul indusului motorului de c.c. cu excitatie paralela sau independenta
Daca in infasurarea indusului se conecteaza rezistenta Rs1, datorita inertiei din primul moment, turatia se mentine, dar motorul trece pe caracteristica meca-nica artificiala in punctul A1. In acest punct totusi momentul motor se arata mai mic decat momentul rezistent (M<Mr), datorita caruia, potrivit ecuatiei de echilibru a momentelor la arborele motorului apare momentul dinamic negativ MJ. Sub actiunea acestui moment, turatia incepe a se reduce pana la momentul in care se restabileste egalitatea M=Mr. Aceasta se obtine in punctul A2, unde caracteristica artificiala se intersecteaza cu caracteristica momentului rezistent. Aici motorul functioneaza in regim stationar dar cu turatia n1<n.
Daca se conecteaza Rs2>Rs1, procesul se desfasoara dupa un procedeu analog pana la regimul stabil de functionare a motorului cu turatia n2<n1. In procesul de reglare potrivit acestui procedeu, cu cat este mai mica turatia de functionare stabila, cu atat ea este mai instabila in raport cu variatiile aleatoare ale momentului rezistent la arborele masinii. Aceasta este asa, deoarece la turatii mai mici, caracte-risticile mecanice (de viteza) sunt mai moi (cu inclinare mai mare fata de axa absciselor), datorita carora variatiile aleatoare mici ale momentului rezistent deter-mina variatii mari ale turatiei.
Reglarea reostatica poseda avantaj sub aspectul posibilitatii de variatie lina a turatiei motorului de c.c. in limite largi, utilizarii unui aparataj de reglare relativ simplu si sigur.
Ca dezavantaje se poate considera turatia de lucru instabila la viteze mici si in special pierderi importante de energie in reostatul de reglaj Rs, prin care trece curentul rotoric al masinii. De aceea acest procedeu de reglare este neeconomic si se utilizeaza mai rar in practica.
La reglajul turatiei prin variatia fluxului
magnetic ![]() in circuitele de excitatie ale motoarelor de
c.c. se includ reostate de reglare Rre
(fig.4.33 a,b,c,d). Cu acestea se
variaza marimea curentului de excitatie si deci si marimea fluxului magnetic.
in circuitele de excitatie ale motoarelor de
c.c. se includ reostate de reglare Rre
(fig.4.33 a,b,c,d). Cu acestea se
variaza marimea curentului de excitatie si deci si marimea fluxului magnetic.
La motoarele cu excitatie serie, reglajul de viteza se poate realiza prin:
Ø suntarea progresiva (fig.4.45) a infasurarii
de excitatie (intrerupatorul k1 inchis), rezultand familia de
caracteristici n=f(M) pentru ![]() (fig.4.46);
(fig.4.46);
Ø suntarea (fig.4.45) infasurarii indusului (intrerupatorul k2 inchis) rezultand familia de caracteristici n=f(M) pentru U<Un (fig.4.47).
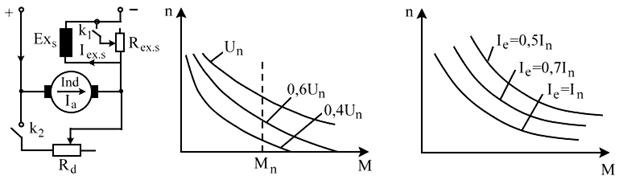
Fig.4.45 Schema electrica Fig.4.46 Familia de Fig.4.47 Familia de
de reglaj a turatiei caracteristici n=f(M) caracteristici n=f(M) a
motorului de c.c. a motorului de c.c. cu motorului de c.c. cu
cu excitatie serie excitatie serie la ![]() excitatie serie la U<Un
excitatie serie la U<Un
In fig.4.48 se prezinta o comparatie intre
caracteristicile mecanice ale unui motor de c,c, cu excitatie serie
reprezentate in unitati relative (nn=1, Mn=1)
pentru cele doua metode de reglaj, unde: 1 - caracteristica mecanica naturala
(c.m.n.); 2 - caracteristica mecanica obtinuta pentru infasurarea de
excitatie serie suntata 50% (![]() ); 3, 4 -
caracteristicile mecanice obtinute pentru suntarea infasurarii indusului prin
cele doua rezistente diferite.
); 3, 4 -
caracteristicile mecanice obtinute pentru suntarea infasurarii indusului prin
cele doua rezistente diferite.
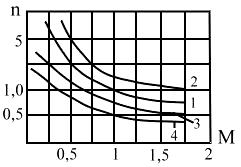
Fig.4.48 Caracteristicile mecanice n=f(M) ale motorului de c.c.
cu excitatie serie obtinute prin cele doua metode de reglaj
Din relatia (4.21) rezulta ca la cresterea curentului
Ie respectiv a fluxului ![]() , n se
reduce si invers. Dependenta turatiei de fluxul magnetic are caracter
hiper-bolic. Caracteristica de reglaj practica n=f(Ie) corespunzatoare acestei dependente este prezentata in
fig.4.49. Ea se ridica la tensiune de alimentare constanta si sarcina constanta
la arborele motorului. Cu cresterea saturatiei, proportionalitatea dintre Ie si
, n se
reduce si invers. Dependenta turatiei de fluxul magnetic are caracter
hiper-bolic. Caracteristica de reglaj practica n=f(Ie) corespunzatoare acestei dependente este prezentata in
fig.4.49. Ea se ridica la tensiune de alimentare constanta si sarcina constanta
la arborele motorului. Cu cresterea saturatiei, proportionalitatea dintre Ie si ![]() se deterioreaza.
se deterioreaza.
Procedeul de reglaj al turatiei prin variatia fluxului magnetic este economic, deoarece este insotit de pierderi de energie sensibil mai mici. Aceasta este asa, deoarece Rre se conecteaza in circuitul de excitatie in care curentul este mult mai mic decat curentul din infasurarea indusului. Astfel, reglajul se realizeaza cu apara-taj simplu si sigur.
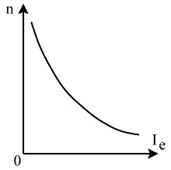
Fig.4.49 Carcateristica de reglaj n=f(Ie) pentru motorul de c.c. cu excitatie serie
Prin acest procedeu de reglare, nu este admis ca turatia sa creasca sensibil - in principiu 1,3 nn (posibilitatile la motoarele serie sunt putin mai mari), deoarece se inrautateste comutatia si apar forte centrifugale periculoase pentru armatura indusului. Pe langa aceasta si prin acest procedeu de reglare se modifica inclinarea caracteristicilor mecanice (de viteza). Din acest motiv, la flux magnetic mai mic (la viteze mari), turatia de lucru este mai instabila.
Potrivit celui deal treilea procedeu de reglaj - prin variatia tensiunii de alimentare, este necesar ca motoarele sa se alimenteze de la sursa de c.c. separata cu tensiune reglabila. Daca se utilizeaza ca sursa generatorul de c.c., grupa obtinuta este numita sistem generator-motor (G-M) sau grupul Leonard. Schema de prin-cipiu a sistemului G-M este prezentata in fig.4.50.
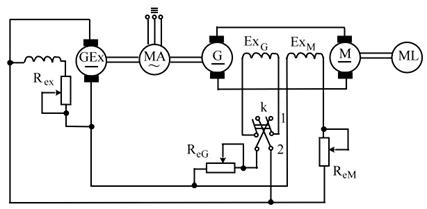
Fig.4.50 Schema de principiu a sistemului G-M
Cu MA se noteaza motorul asincron trifazat de antrenare (la puteri mai mari se poate utiliza si motorul sincron), care este cuplat pe arbore comun cu genera-torul GEx (ce alimenteaza excitatiile G si M) si cu generatorul G ce alimenteaza motorul M de c.c. Prin ML se noteaza masina de lucru, antrenata de motorul M. Generatorul G si motorul M sunt masini de c.c. cu excitatii independente. Infasu-rarile lor de excitatie ExG si ExM sunt alimentate de generatorul GEx, care este cu excitatie paralela.
La sistemul generator motor, pornirea se realizeaza prin agregatul de porni-re (motor de c.a. de antrenare - generator de c.c.), care transforma energia de c.a. in energie de c.c.
Cand sistemul se porneste in gol cu ajutorul reostatului ReG, se regleaza marimea curentului de excitatie la generatorul G asa, incat sa existe valoarea lui minima necesara. Prin acest procedeu, tensiunea de alimentare transmisa la bornele motorului M, are de asemenea valoare mica. Prin aceasta se limiteaza curentul de pornire si in acelasi timp, rotorul motorului capata acceleratia cunoscuta. In conti-nuare, prin cresterea treptata a excitatiei generatorului, deci si a tensiunii cedate motorului M, el se roteste la turatia stabilita. Asadar, prin acest procedeu de por-nire se elimina necesitatea reostatului de pornire, introdus in circuitul infasurarii indusului motorului.
Datorita acestui lucru, procesul de pornire este economic si operatia de pornire se usureaza, deoarece se realizeaza cu reostatul ReG introdus in circuitul de excitatie al generatorului G. Prin acest sistem turatia n se regleaza in doua etape:
Ø in prima etapa turatia se regleaza de la zero
la valoarea stabilita la flux magnetic constant al motorului ![]() , si se
modifica ten-siunea UG a
generatorului G prin reostatul ReG.
Reglarea se realizeaza printr-un astfel de procedeu, incat curentul din
circuitul indusurilor grupului G-M cu rezistenta Ra are valoare constanta, de exemplu egala cu valoarea
nominala Ia=In=const., pentru care:
, si se
modifica ten-siunea UG a
generatorului G prin reostatul ReG.
Reglarea se realizeaza printr-un astfel de procedeu, incat curentul din
circuitul indusurilor grupului G-M cu rezistenta Ra are valoare constanta, de exemplu egala cu valoarea
nominala Ia=In=const., pentru care:
Din expresiile puterii
electrice a motorului P=UG∙Ia si momentului motor ![]() se observa, ca in prima etapa, reglarea se
realizeaza la moment constant M=const. si putere variabila P=var;
se observa, ca in prima etapa, reglarea se
realizeaza la moment constant M=const. si putere variabila P=var;
Ø in a doua etapa, turatia se regleaza prin variatia fluxului magnetic al motorului ΦM<Φn cu reostatul ReM la UG=Un=const. si Ia=In=const.
Domeniul de reglaj in aceasta etapa este
limitat deoarece la turatii mai mari de 1,3∙nn, apar forte centrifuge periculoase pentru rotor si se
inrau-tateste comutatia. In a doua etapa, reglajul se realizeaza la putere
cons-tanta P=UG∙Ia=const. si moment motor
variabil potrivit relatiei: ![]()
In fig.4.51 se prezinta caracteristicile mecanice n=f(M) ale sistemului G-M. Caracteristicile sunt dispuse in primul si al treilea cadran, deoarece motorul poate reversa de sens prin modificarea polaritatii tensiunii de alimentare. Aceasta se realizeaza daca se schimba polaritatea tensiunii de excitatie a generatorului G prin intrerupatorul k.
Avantajele sistemului generator-motor sub aspectul reglarii sunt: domeniu larg si caracterul lent al reglarii, economicitatea procesului (reostatele de reglaj sunt conectate in circuitele de excitatie ale masinilor).
Avantajul primei etape de reglare (prin variatia tensiunii UG) este ca, aceste caracteristici de reglaj nu schimba inclinarea fata de axa absciselor si raman para-lele una fata de alta. Din acest motiv pentru intregul domeniu de reglare in aceasta etapa, stabilitatea turatiei de lucru sub aspectul variatiilor aleatoare ale momentului rezistent Ms se pastreaza.
Stabilitatea se reduce intr-un grad cunoscut prin a doua etapa de
reglare (prin fluxul magnetic![]() ) pentru
turatii mai mari decat cea nominala.
) pentru
turatii mai mari decat cea nominala.
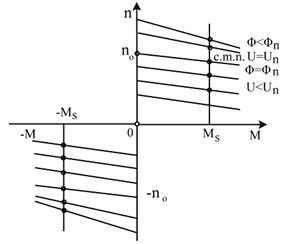
Fig.4.51 Caracteristicile mecanice ale grupului G-M
Dezavantajul sistemului G-M consta in costul lui ridicat si valoarea relativ mica a randamentului lui datorita catorva transformari ale energiei din mecanica in electrica si inversa. Datorita avantajelor sale, sistemul generator-motor are o apli-catie larga in actionarile electrice ale sondelor, excavatoarelor s.a.
In scopul cresterii productivitatii lui, el se automatizeaza. Initial au fost ela-borate sistemele generator-motor la care generatorul G are trei infasurari de exci-tatie. Acest sistem se aplica in actionarea mecanismelor principale ale excavatoa-relor cu brat cu o cupa. Mai tarziu in scopul automatizarii, ca generatoare de exci-tatie in sistemul G-M s-au introdus masini speciale de c.c., numite masini electrice amplificatoare. Aceasta forma de actionare electrica reglabila se utilizeaza de exemplu la organul de perforare al sondelor. Sistemul este generator-motor cu ma-sini electrice amplificatoare.
In ultima vreme, in locul generatorului de c.c. G se utilizeaza redresoare comandate cu semiconductoare (tiristoare). Convertoarele de curent cu tiristoare au indicatori energetici mai buni decat ai generatoarelor de c.c. Iata de ce in actiona-rile electrice automatizate se aplica tot mai mult sistemele "convertor static motor de c.c." Spre exemplu la sondele modernizate, organul de perforare este actionat de motor de c.c. alimentat de punte trifazata redresoare.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3054
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved