| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
GIROCOMPASUL
1.1. Generalitati. Definitii.
Girocompasul este unul dintre aparatele de navigatie folosite pentru determinarea cursului navei.
Functionarea acestui aparat se bazeaza pe exploatarea celor doua proprietati fundamentale ale giroscopului cu trei grade de libertate (1.3), inertia (1.5) si precesia (1.7).
Giroscopul cu trei grade de libertate este un sistem format dintr-un rotor (tor giroscopic) si o suspensie care asigura un punct fix pe axa de simetrie a rotorului.
pentru calculul momentului de inertie al
unui cilindru plin R - raza cilindrului plin r - raza stratului inelar dr -
grosimea stratului inelar h - inaltimea cilindrului
Fig.G1
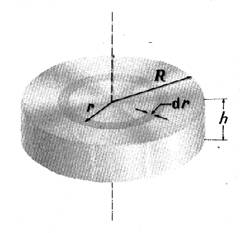
1.2. Momentul de inertie al torului giroscopic
![]() (1.0)
(1.0)
unde: dm este masa elementului de volum situat la distanta
r fata de axa de simetrie (fig.G1), iar
![]()
unde: h este inaltimea cilindrului avand densitatea
r uniforma, rezultand:
adica: ![]() (1.1)
(1.1)
momentul de inertie al torului giroscopic ideal[4] este evident:
J = mR2 (1.2)
adica de doua ori mai mare decat al cilindrului plin.
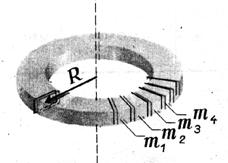
Intr-adevar, momentul de inertie al unui inel subtire, de masa m si raza medie R fata de axa sa, se poate calcula impartind inelul in n segmente, fiecare la distanta R fata de axa (fig.G2), obtinand:
![]()
adica: J = mR2 (q.e.d.)
R - raza medie a torului mi - masa elementara
Fig.G2
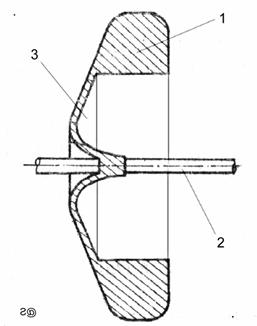
Din motive care tin de limitarile tehnologice actuale, constructia rotorului giro nu este chiar de forma torului giroscopic ideal, ci una ca cea prezentata in figura G3, in care masa principala[5] (masa torului propriu-zis) este concentrata spre periferie, in raport cu axa de simetrie a rotorului.
Fig.G3 Sectiune prin rotorul giroscopic 1 - (ro)tor
giroscopic 2 - axul
rotorului giro - fusta rotorului giro
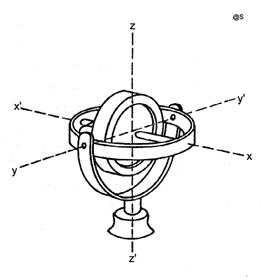
1.3. Gradele de libertate ale rotorului giroscopic
Pentru a-i putea exploata principalele proprietati, inertia si precesia, rotorului giroscopic i se da numai posibilitatea de efectuare a miscarilor de rotatie in jurul celor trei axe de coordonate. Astfel numarul gradelor de libertate este N = 3 (fig.G4a, b), adica:
- torul se poate roti liber in jurul axei de simetrie x - x', axa principala (de rotatie proprie) a giroscopului;
- torul isi poate modifica zenitul, rotindu-se in jurul axei y -y';
- torul isi poate modifica azimutul, rotindu-se in jurul axei z - z'
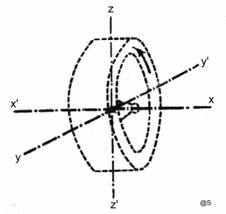
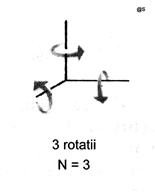
a) b)
fig.G4
Originea sistemului de axe de coordonate se numeste, in acest caz, centrul giroscopului si este in acelasi timp centrul de masa (greutate) al rotorului giro.
1.4. Suspensia giroscopului cu trei grade de libertate
In principiu, suspensia este asigurata de un sistem cardanic care consta in doua elemente mobile:
- elementul cardanic orizontal, care se poate roti in jurul axei y - y'
- elementul cardanic vertical, care se poate roti in jurul axei z - z'.
Miscarea principala de rotatie (engl: spin rotation) este posibila datorita existentei unei perechi de lagare, continute de elementul cardanic orizontal, in care se poate roti cu frecari neglijabile, axul rotorului giro.
Miscarea de rotatie in jurul axei y - y', fata de orizontul adevarat al locului (engl: tilt rotation), este posibila datorita unei alte perechi de lagare continute de elementul cardanic vertical, in care se poate roti elementul cardanic orizontal.
Miscarea de rotatie in jurul axei z - z', fata de meridianul adevarat al locului, (engl: heading rotation) este posibila datorita lagarelor (fig.G6) sau lagarului (fig.G7) din suportul suspensiei cardanice.
Ambele variante de suspensie cardanica ofera acelasi numar de grade de libertate (N = 3), permitand miscari de rotatie in jurul celor trei axe de coordonate.
1.5. Momentul cinetic al giroscopului
 Fiecare particula de masa mi, situata la
distanta ri de axa principala de rotatie (fig.G8),
are viteza liniara vi, tangenta la
traiectoria circulara de raza ri, incat momentul
cinetic al giroscopului este:
Fiecare particula de masa mi, situata la
distanta ri de axa principala de rotatie (fig.G8),
are viteza liniara vi, tangenta la
traiectoria circulara de raza ri, incat momentul
cinetic al giroscopului este:

Introducand momentul de inertie definit prin relatia (1.2), rezulta:
![]() (1.4)
(1.4)
1.6. Inertia giroscopului
Legea inertiei afirma ca in lipsa vreunei interactiuni, un corp solid rigid isi pastreaza momentul impulsului (cinetic), adica:
![]()
In cazul unui giroscop liber, aceasta inseamna ca produsul ![]() ramane constant, sub conditia ca
valoarea vitezei unghiulare sa ramana constanta, suportul
vectorului
ramane constant, sub conditia ca
valoarea vitezei unghiulare sa ramana constanta, suportul
vectorului ![]() pastrandu-si neschimbata
directia in spatiu.
pastrandu-si neschimbata
directia in spatiu.
Asadar, torul giroscopic caruia i s-a imprimat o viteza unghiulara considerabila si constanta, isi mentine axa principala de rotatie paralela cu ea insasi, indicand aceeasi directie in spatiu.
Observatia este valabila daca asupra giroscopului cu trei grade de libertate nu actioneaza nici o forta avand un suport exterior centrului giroscopului.
Proprietatea poarta numele de inertie giroscopica.
Aceasta proprietate face ca axa principala a giroscopului, care are de fapt o pozitie invariabila in spatiu, sa prezinte o miscare aparenta fata de reperele terestre, din cauza miscarii diurne a Pamantului.
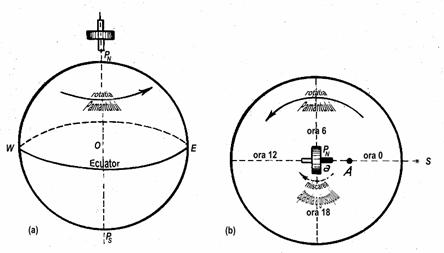
1.6.1. Miscarea aparenta a
giroscopului aflat la polii terestri
In fig.G9(a) axa principala de rotatie a giroscopului este continuta in axa de rotatie a Pamantului si nu efectueaza nici o miscare aparenta, pentru un observator terestru.
Daca axa principala a giroscopului aflat la pol este orizontala pentru observator si orientata initial spre astrul S (fig.G9-b), capatul a va descrie, in 24 ore siderale, in raport cu punctul A de pe Pamant, o rotatie completa (360 ) in sens invers trigonometric.
![]()
Fig.G9.
Miscarea aparenta a giroscopului aflat la Polul Nord
1.6.2. Miscarea aparenta la Ecuator (fig.G10)
Axa principala a giroscopului este in momentul initial paralela cu orizontul si orientata pe directia N-S (a). Deoarece axa giroscopului este paralela cu axa Pamantului, acest paralelism se va mentine de-a lungul celor 24h ale rotatiei terestre complete si in tot acest timp nu se va observa nici o miscare aparenta a giroscopului. Axa ramane in meridianul locului, paralela cu orizontul.
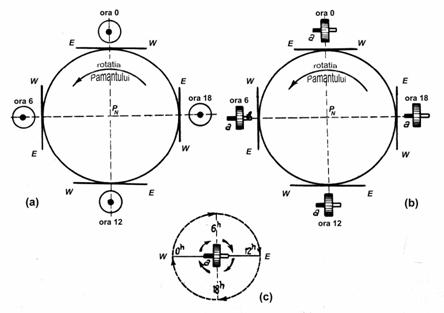
Fig.G10
Miscarea aparenta a giroscopului la Ecuator
In cazul (b) axa principala a giroscopului este, la momentul t = 0h, paralela cu orizontul, insa orientata pe directia E-W, deci perpendiculara pe planul meridianului si pe axa terestra. Pentru observatorul de la fata locului, capatul a se ridica treptat deasupra orizontului, iar dupa 6h ajunge la zenit. La momentul t =12h, axa principala devine iarasi paralela cu orizontul, insa avand capatul a orientat spre vest. Dupa inca 6h capatul a se afla orientat spre centrul Pamantului (axa principala este iarasi paralela cu axa terestra).
La momentul t = 24h, giroscopul se afla in pozitia initiala, avand executata o miscare aparenta (c) de 360 intr-un plan perpendicular pe planul meridianului locului.
Miscarea aparenta a giroscopului
la o latitudine oarecare
Giroscopul si observatorul se gasesc la o latitudine oarecare j, iar axa principala este paralela cu orizontul si orientata pe directia N-S, la momentul t = 0 (fig.G11). In felul acesta, axa principala face cu axa Pamantului, la momentul initial, un unghi de valoare egala cu latitudinea (j
Odata cu rotirea Pamantului de la vest spre est, are loc si rotirea planului meridianului si a planului orizontului locului. Are loc in acest fel, o miscare aparenta a axei principale de rotatie a giroscopului - capatul a se deplaseaza spre dreapta meridianului (spre est) si se ridica deasupra orizontului. La momentul t = 6h, axa principala va face unghiul a cu directia N-S si unghiul j atat cu planul meridianului, cat si cu planul orizontului. La t = 12h, axa principala se gaseste din nou in meridian, dar sub un unghi de 2j fata de planul orizontului. La t = 18h, axa principala ocupa o pozitie simetrica fata de cea avuta la t = 6h.
Axa principala a giroscopului descrie deci, un unghi solid cu valoarea 2j
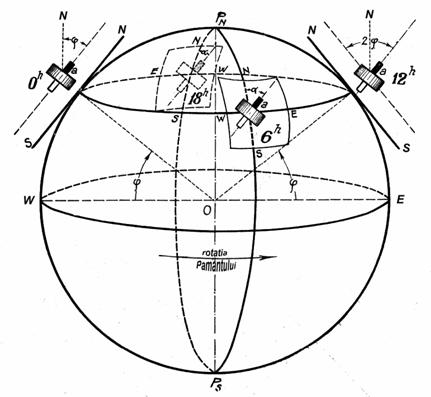
Fig.G11
Miscarea aparenta a giroscopului la o latitudine oarecare
1.7. Precesia giroscopului
Definitie: Polul giroscopului este un punct de pe axa principala de rotatie, din care rotirea torului se observa in sens trigonometric (fig.G12).
Daca asupra axei principale a giroscopului se aplica o forta exterioara F oarecare, axa principala se va roti intr-un plan perpendicular pe suportul fortei, sensul miscarii fiind dat de regula burghiului drept. Aceasta miscare poarta numele de miscare de precesie.
Fig.G12 Precesia giroscopului
Daca se lasa sa actioneze un moment exterior M, de exemplu prin atarnarea unei greutati de masa m la distanta r de punctul de suspensie, atunci:
![]() (1.6)
(1.6)
iar giroscopul (varful vectorului w se roteste intr-un plan perpendicular pe suportul fortei F. Fenomenul poarta denumirea de precesie regulata; cauza acestei precesii este continuta in teorema momentului cinetic (1.7) conform careia actiunea momentului unei forte al carei suport nu contine centrul geometric si de masa al giroscopului, produce o variatie in timp a momentului cinetic:
![]() (1.7)
(1.7)
Variatia dH se produce pe directia momentului M al fortei F, adica perpendicular pe suportul vectorului moment cinetic H. In intervalul de timp dt, vectorul moment cinetic se roteste cu unghiul:
![]() (1.8)
(1.8)
catre H' (fig.G12), avand loc miscarea de precesie a giroscopului.
Pentru viteza unghiulara a precesiei:
![]()
Rezulta din (1.8) si (1.4 - H = Jw
![]() (1.9)
(1.9)
In scriere vectoriala:
![]()
Observatie:
Relatia (1.9) este valabila numai atat timp cat w>>wp; in caz contrar, viteza unghiulara rezultanta nu mai are directia lui H, astfel ca nu mai poate fi folosita relatia (1.4). Cand w devine prea mica, miscarea de precesie devine instabila.
Daca asupra unui giroscop nesupus actiunii vreunei alte forte, se exercita un moment de rotatie M de durata, cu directie constanta (diferit de fig.G12, unde directia momentului fortei se roteste impreuna cu precesia), atunci, conform (1.7), H este indreptat spre directia lui M.
Acest efect este folosit la compasul giroscopic: lasand un giroscop sa se miste liber, de ex. intr-un lagar plutitor, doar intr-un plan orizontal, rotatia Pamantului exercita un moment de rotatie asupra giroscopului, care actioneaza paralel cu suportul vitezei unghiulare a Pamantului. Astfel axa giroscopului se indreapta permanent in directia polului nord geografic (navigatie inertiala).
Momentele cinetice orbitale ale atomilor si momentele cinetice proprii ale nucleelor atomice si ale particulelor elementare, ca urmare a momentelor lor magnetice, capata in camp magnetic momente de rotatie care duc, ca si in cazul giroscopului, la miscari de precesie:
rezonanta electronica de spin;
rezonanta nucleara.
1.8. Transformarea giroscopului
in girocompas prin metoda pendulara
Datorita inertiei giroscopului si miscarii de rotatie a Pamantului, directia axei principale de rotatie x-x' isi schimba pozitia fata de meridian (fig.G13).
Atasand giroscopului o masa suplimentara m cu un singur grad de libertate fata de x-x' (suspendata de axa), se obtine coborarea centrului de greutate al ansamblului giroscop-masa suplimentara, sub centrul de suspensie.
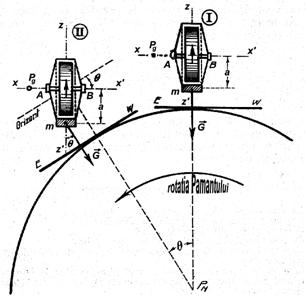
fig.G13.
Transformarea giroscopului cu trei grade de libertate in girocompas
prin metoda pendulara
Ansamblul poarta denumirea de girocompas pendular datorita faptului ca giroscopul se comporta ca un pendul. Girocompasul astfel obtinut se mai numeste si girocompas cu centrul de greutate coborat.
Urmarind fig.G13, se poate observa ca in pozitia I, axa principala a giroscopului este paralela cu orizontul si orientata pe directia E-W, iar axa orizontala y-y' este perpendiculara pe planul figurii. In aceasta pozitie, forta de gravitatie G este orientata de-a lungul axei z-z', iar momentul acestei forte in raport cu centrul de suspensie al giroscopului este nul. In acest caz nu are loc precesia si axa principala nu-si schimba directia.
Dupa un mic interval de timp, in care Pamantul se roteste cu unghiul q (poz.II), capatul A al giroscopului are o miscare aparenta de ridicare deasupra orizontului, iar capatul B are o miscare de coborare, astfel incat axa x-x' face acum unghiul q cu orizontul locului. Centrul de greutate al giroscopului se mentine in verticala locului, dar centrul de greutate al masei suplimentare iese din aceasta si creeaza un moment in jurul axei y-y', de marime:
![]() (1.10)
(1.10)
in care a este distanta dintre centrul de greutate al giroscopului (Cgg) si centrul de greutate al masei suplimentare (Cgm).
Sub actiunea fortei G care creeaza momentul My, apare precesia giroscopului in jurul axei sale de rotatie z-z', cu viteza unghiulara:
![]() (1.11)
(1.11)
Miscarea unghiulara de precesie aduce capatul A al giroscopului in meridian, dar nu inceteaza atunci cand axa principala este continuta in planul meridianului, ci continua datorita inertiei sistemului, facand ca girocompasul sa iasa din nou din directia N-S.
Apar astfel oscilatii neamortizate ale axei principale de rotatie a girocompasului.
Fig.G14
Detaliu - poz.II din fig.G13
1.9. Oscilatiile neamortizate ale girocompasului
Axa principala a girocompasului nu ramane stabila in planul meridianului, la sfarsitul precesiei regulate, ci oscileaza in jurul acestuia, descriind (capatul A) o elipsa.
In figura G15 sunt prezentate proiectiile succesive ale capatului A al giroscopului, pe un plan (Q) perpendicular pe planul meridianului locului, pe durata unui ciclu.
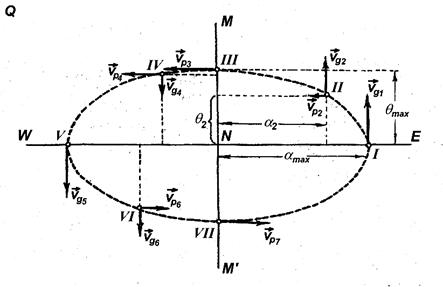
fig.G15
Oscilatiile neamortizate ale girocompasului
Linia verticala MM' reprezinta intersectia planului Q cu planul meridianului.
Linia orizontala EW reprezinta intersectia planului Q cu planul orizontului.
Punctul de intersectie al celor doua drepte reprezinta nordul (N).
In figura G15 au fost folosite urmatoarele notatii:
a - deviatia unghiulara a axei principale fata de meridianul locului;
q - deviatia unghiulara a axei principale fata de orizontul locului;
vg - viteza capatului A al giroscopului fata de orizont;
vp - viteza miscarii de precesie.
Initial (poz.I), deviatia unghiulara fata de meridian este maxima (amax) si capatul A se gaseste in planul orizontului (q =0), miscandu-se cu o viteza vgmax fata de orizont.
Din cauza miscarii de rotatie a Pamantului, capatul A se ridica aparent (planul orizontului incepe sa coboare - poz.II) cu viteza vg2, capatand o inclinatie q2 Sub actiunea momentului fortei de gravitatie a masei suplimentare, care creeaza precesia, capatul A se misca inspre meridian cu viteza vp2.
Pe masura ce capatul A se ridica deasupra orizontului si se apropie de meridian, vg scade, iar vp creste, astfel ca in pozitia a III-a, unde axa giroscopului ajunge in meridian (a3 = 0, q3 = qmax), vg este nul, iar vp este maxim. Precesia, maxima in acest punct, deplaseaza acum capatul A spre stanga (W) meridianului.
Planul orizontului incepe sa urce si capatul sa coboare, in mod aparent, cu viteza vg4 (poz.IV). Unghiul q incepe sa scada, in timp ce a creste spre vest, astfel ca vp se micsoreaza treptat, iar vg creste, pana cand capatul A ajunge din nou in orizont (q5 deviat maxim spre vest fata de meridian. Miscarea de precesie inceteaza, dar coborarea aparenta a capatului A continua sub orizont cu viteza vgmax. Dupa coborarea capatului A sub orizont, precesia are loc spre est, cu viteza crescanda.
Capatul A al giroscopului ocupa succesiv pozitiile VI, VII.etc, revenind in pozitia initiala, dupa ce a descris o elipsa completa.
Daca nici o alta forta exterioara nu intervine, oscilatiile au loc incontinuu, la aceeasi amplitudine (nu se amortizeaza).
Perioada oscilatiilor libere este data de relatia:
![]() (1.12)
(1.12)
unde:
H este momentul cinetic al torului giroscopic;
W este viteza unghiulara a Pamantului;
G este forta de gravitatie a masei suplimentare;
a este distanta de la centrul de greutate al masei suplimentare la centrul (de greutate) al giroscopului;
j este latitudinea locului.
Elipsa oscilatiilor este foarte elongata pe axa continuta in planul orizontului, oscilatiile eliptice apropiindu-se de oscilatii plane. De exemplu, pentru o deviatie unghiulara amax = 900, deviatia unghiulara fata de orizont este qmax
1.10. Amortizarea oscilatiilor girocompasului
Momentul fortelor de frecare din lagarele sistemului de suspensie cardanic este neinsemnat in raport cu momentul cinetic al torului, astfel incat oscilatiile neamortizate pot avea loc timp de saptamani. Este evidenta nevoia de a amortiza aceste oscilatii, pentru a putea folosi girocompasul ca aparat de orientare in navigatie.
La compasele giroscopice pendulare, metoda de amortizare a oscilatiilor consta in atasarea la partea superioara a sistemului cardanic de suspensie, a unui sistem de vase comunicante cu ulei a carui cale de comunicare intre vase este paralela cu axa principala de rotatie a giroscopului.
In pozitie orizontala, cantitatea de ulei din sistem asigura umplerea fiecarui vas la jumatate de nivel. Pe calea de comunicare este prevazuta o minivana, cu ajutorul careia se poate regla debitul uleiului care va circula intre vase.
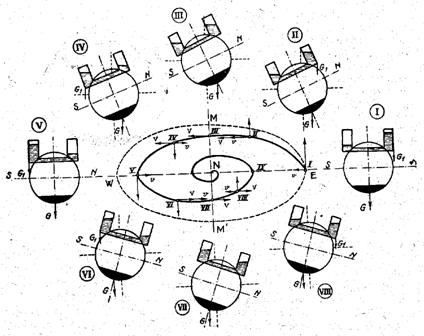
Fig.G16
Oscilatiile amortizate ale girocompasului
Oscilatiile girocompasului sunt amortizate prin realizarea unei diferente de faza intre perioada oscilatiilor neamortizate ale axei principale a torului si perioada oscilatiilor nivelului uleiului in vasele comunicante.
Diferenta de faza optima se obtine prin reglarea debitului cu ajutorul minivanei de pe calea de comunicare (diferenta de faza optima este de p/2, adica amplitudinile celor doua oscilatii trebuie sa fie in cuadratura).
In figura G16 este prezentata traiectoria descrisa de proiectia extremitatii A a torului giroscopic pe un plan vertical Q.
Consideram ca viteza miscarii de precesie are doua componente:
V - viteza precesiei principale;
v - viteza precesiei secundare, provocata de surplusul de lichid dintr-unul din vasele comunicante.
Viteza de ridicare sau coborare a extremitatii A a torului fata de orizont se modifica la fel ca si in cazul oscilatiilor neamortizate, valoarea ei fiind proportionala cu deplasarea unghiulara fata de meridian.
Pozitia I - axa principala este orizontala, deviata din planul meridianului cu unghiul a1 forta gravitationala a masei suplimentare nu produce precesie, dar greutatea G1 corespunzatoare acumularii maxime de lichid in recipientul dinspre nord, provoaca precesia suplimentara v, iar capatul nordic incepe sa se deplaseze catre meridian.
Pozitia II - capatul nordic al axei s-a apropiat de meridian si s-a ridicat deasupra orizontului; lichidul din vasul dinspre nord este inca in surplus deoarece nu a reusit sa treaca in celalalt vas pentru echilibrare. Asupra girocompasului actioneaza concomitent fortele G si G1, care provoaca atat precesia principala V, cat si precesia suplimentara v, ambele orientate in acelasi sens (spre meridian). Cele doua miscari de precesie sunt acum in faza si precesia totala provoaca miscarea accelerata a axei principale spre planul meridianului.
Pozitia III - axa principala a ajuns in meridian, unghiul q este maxim, iar lichidul in cele doua vase s-a echilibrat. Asupra girocompasului actioneaza numai forta G care produce precesia principala V, mai mica decat precesia totala (V + v) din pozitia a II-a. Axa principala trece la vest de meridian.
Pozitia IV - lichidul a inceput sa treaca in vasul dinspre sud, formand surplus si dand nastere fortei gravitationale G1 care provoaca precesia suplimentara v, orientata spre meridian. In acelasi timp, greutatea G a masei suplimentare provoaca precesia principala V, in sens contrar lui v. Cele doua viteze sunt in antifaza si precesia totala (V - v) produce o deplasare incetinita a axei principale de la planul meridianului. Datorita acestei acceleratii negative, deviatia unghiulara a axei principale catre vest va fi mai mica decat in cazul oscilatiilor neamortizate.
Pozitia V - axa principala este in planul orizontului, asadar forta G nu produce precesie principala. Lichidul are nivel maxim in vasul dinspre sud, iar forta G1 da nastere precesiei suplimentare v orientata spre meridian. Deviatia unghiulara a5 fiind mai mica decat in cazul oscilatiilor neamortizate, viteza de coborare (vg) a extremitatii A a giroscopului este mai mica, ceea ce produce o noua amortizare.
Pozitia VI - precesia principala si precesia suplimentara sunt din nou in faza, ceea ce face ca precesia totala (V + v) sa miste accelerat axa principala spre meridian.
Pozitia VII - actioneaza numai precesia principala V, care este mai mica decat precesia totala din poz.VI; axa principala trece la est de meridian si incepe sa se ridice.
Pozitia VIII - cele doua miscari de precesie au semne diferite, iar precesia totala (V -v) produce incetinirea indepartarii axei de meridian.
Dupa ce axa principala ajunge din nou in planul orizontului (poz.IX), deviata la est de meridian cu a9 < amax, amortizarea continua, nu dupa o traiectorie eliptica, ci dupa o spirala eliptica, astfel ca dupa un timp oarecare, axa principala a girocompasului se stabilizeaza definitiv in meridian.
Raportul dintre deviatiile unghiulare succesive de o parte si de alta a meridianului, are o valoare constanta si se numeste factor de amortizare - fam.
1.11. Erorile girocompaselor
In comparatie cu situatia particulara a unui girocompas plantat cu sistemul sau de suspensie pe suprafata terestra, la o latitudine oarecare (aflat in imobilitate fata de repere terestre), girocompasul amplasat pe un postament solidar cu nava, sufera nu numai influenta miscarii diurne a Pamantului, ci si influenta miscarilor navei (deplasarea intr-un anumit drum, schimbarile de viteza, schimbarile de drum, ruliul si tangajul etc). Aceste miscari ale navei genereaza erori care altereaza directia nord-girocompas (0Ng) in raport cu directia nord adevarat. In functie de cauzele care le provoaca, erorile girocompasului sunt:
eroarea de viteza;
erori de acceleratie (erori balistice);
eroarea de balans;
erori accidentale.
In afara de erorile variabile enumerate mai sus, exista si o eroare constanta de aliniere sau de colimatie; ea consta intr-o deviatie unghiulara permanenta a habitaclului girocompasului fata de axa longitudinala a navei.
1.11.1. Eroarea de viteza
In studiul transformarii
giroscopului liber in girocompas, s-a presupus ca giroscopul se
gaseste amplasat fix, intr-un punct de pe Glob, la o latitudine
oarecare![]() ,
iar planul orizontului se roteste in spatiu cu o viteza
unghiulara W. Viteza tangentiala
corespunzatoare acestui punct va fi:
,
iar planul orizontului se roteste in spatiu cu o viteza
unghiulara W. Viteza tangentiala
corespunzatoare acestui punct va fi:
![]() (1.13)
(1.13)
Sa presupunem nava deplasandu-se
odata cu girocompasul cu o viteza v intr-un drum oarecare D
(fig.G17). Planul orizontului legat de nava va executa o miscare
circulara in jurul unei axe perpendiculare pe planul continand
centrul Pamantului si vectorul ![]() .
Viteza unghiulara a acestei miscari circulare este:
.
Viteza unghiulara a acestei miscari circulare este:
![]() (1.14)
(1.14)
in care R este raza Pamantului.
Viteza unghiulara a miscarii circulare a planului orizontului datorata miscarii de rotatie diurne a Pamantului este data de relatia:
![]() (1.15)
(1.15)
Insumand cele doua viteze unghiulare, se obtine viteza unghiulara rezultanta:
![]() (1.16)
(1.16)
Constructia vectorului viteza unghiulara rezultanta se face dupa cum urmeaza:
Vectorul ![]() (viteza unghiulara a deplasarii
navei) se descompune intr-o componenta aflata in plan ecuatorial (
(viteza unghiulara a deplasarii
navei) se descompune intr-o componenta aflata in plan ecuatorial (![]() )
si o componenta pe axa polilor (
)
si o componenta pe axa polilor (![]() ).
).
Vectorul ![]() nu are componenta in plan ecuatorial (
nu are componenta in plan ecuatorial (![]() ).
).
Asadar, componenta din axa polilor a vectorului viteza unghiulara rezultanta este suma:
![]()
Fig.G17
Eroarea de viteza a girocompasului
Directia vitezei unghiulare rezultante fata de planul meridianului este data de unghiul d si pe ea se stabilizeaza axa girocompasului de pe nava aflata in miscare. Aceasta directie se numeste meridian giroscopic.
Deviatia meridianului giroscopic fata de meridianul geografic este data de relatia:
![]() (1.17)
(1.17)
Se inlocuiesc vitezele unghiulare cu viteze tangentiale, astfel:
 (1.18)
(1.18)
Deoarece viteza navei este data in noduri (Mm/h), trebuie exprimata si viteza tangentiala a Pamantului la Ecuator, in aceeasi unitate de masura. Viteza unghiulara de rotatie a Pamantului este:
Raza Pamantului la Ecuator este R = 6378,388 km.
Valoarea unei mile marine este 1Mm = 1853,18 m
Rezulta raza Pamantului, in mile marine:
![]()
Asadar, viteza tangentiala a Pamantului la Ecuator este:
![]()
Inlocuind in (1.18), se obtine:
![]() (1.19)
(1.19)
Deoarece d are valori foarte mici, tangenta poate fi substituita cu marimea arcului (unghiului), iar viteza tangentiala a Pamantului la Ecuator se aproximeaza la 900 Nd si astfel:
![]() (1.20)
(1.20)
Se poate concluziona ca:
eroarea girocompasului datorata vitezei navei (dg) nu depinde de parametri constructivi ai girocompasului si se poate calcula indiferent de tipul lui;
eroarea de viteza se calculeaza permanent - ea creste odata cu latitudinea si este proportionala cu viteza navei
eroarea este maxima in drumurile de nord (00) si sud (1800);
eroarea este nula in drumurile de est (900) si vest (2700).
1.11.2. Erorile balistice ale girocompasului
In timpul manevrei de intoarcere a navei, se produc variatii bruste de drum si viteza. Ele imprima girocompasului accceleratii care dau nastere unor miscari de precesie in jurul axei principale, numite precesii balistice. Odata cu variatia drumului si a vitezei navei, se produce si variatia erorii de viteza, adica deplasarea meridianului giro fata de pozitia initiala, intr-un anumit sens determinat de caracterul intoarcerii navei.
Intr-adevar, considerand latitudinea j constanta, vom avea pentru un anumit drum initial D1 si o viteza initiala v1, eroarea de viteza:
![]() (1.21)
(1.21)
careia ii corespunde meridianul giro Ng1
In noul drum D2 si pentru noua viteza v2, la terminarea manevrei, vom avea o alta eroare de viteza:
![]() (1.22)
(1.22)
careia ii corespunde un alt meridian giro Ng2, deplasat unghiular in sensul in care s-a deplasat meridianul giro (fig.G18).
In principiu, pentru a asigura orientarea mai rapida a axei principale in noua pozitie de echilibru (noul meridian giro), se dezactiveaza dispozitivul de amortizare al oscilatiilor inainte de inceperea manevrei de schimbare de drum si se cupleaza din nou dupa ce aceasta s-a terminat. Totusi, amortizarea oscilatiilor se face destul de incet si axa principala revine in noul meridian giro intr-un interval de timp mult mai mare (1..2h) decat durata manevrei (cateva minute).
In urma miscarii de precesie balistica, axa principala a girocompasului poate ocupa, la terminarea manevrei, una din urmatoarele trei pozitii, in raport cu noul meridian giro:
a) coincide cu noul meridian giro, deplasandu-se impreuna cu acesta, daca viteza precesiei balistice este egala cu viteza de deplasare a meridianului giro; evident, valoarea erorii balistice este zero;
b) depaseste meridianul giro, daca viteza precesiei balistice este mai mare decat viteza de deplasare a meridianului giro;
c) ramane in urma meridianului giro, deplasandu-se mai putin decat acesta, daca viteza precesiei balistice este mai mica decat viteza de deplasare a meridianului giro.
In functie de aceste situatii, trecerea axei principale a girocompasului in noua pozitie de echilibru poate fi:
aperiodica (fara oscilatii) in cazul a) si
periodica (cu oscilatii) in cazurile b) si c).
Evident, cea mai avantajoasa trecere a axei principale in pozitia de echilibru, in ceea ce priveste precizia si stabilitatea girocompasului, este cea aperiodica.
1.11.3. Eroarea de balans
Acest tip de eroare se produce la ruliu si la tangaj, atunci cand punctul de suspensie al girocompasului capata o acceleratie a carei perioada este foarte mica (6.15s) in comparatie cu perioada oscilatiilor girocompasului (1.2h). Valoarea maxima a acceleratiei in cazul ruliului sau al tangajului este mult mai mare decat in timpul intoarcerii navei.
Valoarea erorii de balans depinde de latitudinea si amplitudinea tangajului sau a ruliului. Ea creste proportional cu amplitudinea balansului.
Practic, eroarea de balans se inlatura prin utilizarea unui sistem format din doua giroscoape cuplate printr-un sistem de parghii antiparalelogram, astfel incat axele lor sa faca intre ele un unghi de 900 in lipsa precesiei.
Giroscoapele (giromotoarele) sunt incasetate intr-o girosfera al carei centru de greutate este coborat sub centrul ei geometric, ceea ce ii confera efectul pendular.
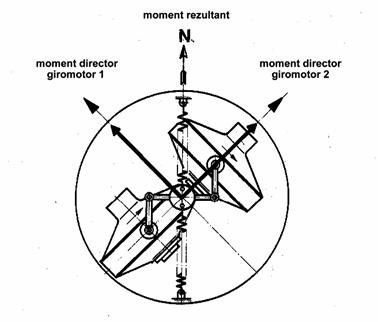
Fig.G19
Diminuarea erorilor de balans
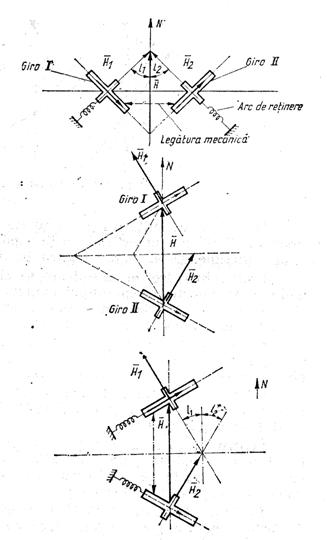
Legatura giromotoarelor face ca
momentul cinetic al ansamblului sa ramana constant
Structura echipamentului giro este prezentata in fig.G21 si contine:
A. Ansamblul element sensibil - element de urmarire (ES-EU).
B. Sistemul de urmarire.
C. Sistemul de distributie al informatiei referitoare la alterarea cursului navei.
D. Sistemul de alimentare.
E. Sistemul de reglare al temperaturii mediului ES.
Particularitatea aparatului electric de navigatie care ofera informatia referitoare la alterarea cursului navei consta in faptul ca elementul sensibil este urmarit de o parte a interfetei de prelevare. Aceasta actiune este indeplinita de catre elementul de urmarire.
Pentru sistemul de urmarire, elementul sensibil initiaza livrarea marimii de intrare, iar elementul de urmarire este obiect comandat si hemiinterfata informatoare.
Elementul de urmarire este de obicei solidar cu indicatorul grosier al cursului navei.
Pentru sistemul de reglare a temperaturii, mediul existent in ansamblul ES-EU este generator de informatie si tinta pentru obiectul comandat de sistem - ansamblul climatizor.
Sistemul de urmarire
Orice modificare a cursului (drumului) navei are drept rezultat schimbarea pozitiei unghiulare a sferei (elementului) de urmarire fata de elementul sensibil orientat in meridian. Aceasta modificare se traduce in dezechilibrarea puntii Wheatstone ce are in alcatuire doua elemente rezistive reprezentate de coloanele de lichid-suport (mediu interstitiu) dintre electrozii de urmarire ai sferei (elementului) de urmarire si banda conductiva ecuatoriala a girosferei.
Inegalitatea valorilor rezistentelor coloanelor de lichid genereaza inegalitatea curentilor care strabat infasurarile primare ale transformatorului simetric si, drept urmare, aparitia unei tensiuni cu o anumita faza in secundarul transformatorului. Aceasta tensiune este amplificata si comparata cu o referinta inainte de a fi aplicata electromotorului de urmarire. Sensul de rotatie si numarul de revolutii al acestuia trebuie sa compenseze prin demultiplicare, decalajul unghiular dintre EU si ES.
fig.GC22
Sistemul de urmarire contine:
circuitul de prelevare (circuitul-punte - fig.GC23);
transformatorul simetric;
amplificatorul;
servomotorul (Mot);
taho-generatorul (Gen);
mecanica de urmarire;
sfera de urmarire.
Fig.GC23
Alimentarera giromotoarelor si
prelevarea semnalului
"eroare de curs"
Alimentarea celor doua giromotoare asincrone cu infasurari statorice trifazate se face aplicand o tensiune monofazata intr-o configuratie ca cea din fig.GC23.
Turatia lor este datade relatia:
![]()
unde s este alunecarea electrica a giromotorului asincron;
f este frecventa tensiunii de alimentarte a giromotoarelor;
p este numarul de perechi der poli statorici.
 fig.GC24
fig.GC24
Puntea pentru prelevarea semnalului diferenta de curs este formata din infasurarile primare L1, L2 ale transformatorului simetric TR si cele doua rezistente variabile RW1, RW2 ale lichidului-suport (care se formeaza intre contactele captoare ale sferei de urmarire si capetele benzii conductive ecuatoriale ale girosferei), inseriate cu rezistentele R1, R2 ale coloanelor de lichid dintre suprafetele conductive ecuatoriale si domul conductiv inferior al girosferei.
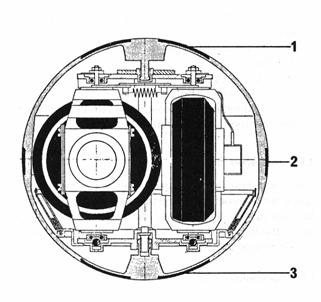
fig.GC25
1 - dom conductiv superior
2 - banda conductiva ecuatoriala
3 - dom conductiv inferior
Sistemul de transmitere si
distributie a semnalului alterare curs
Un mecanism demultiplicator angrenat de electromotorul de urmarire antreneaza transmitatorul de curs (T), iar acesta livreaza semnalul corespunzator alterarii cursului, repetitoarelor giro si receptoarelor inglobate in celelalte aparate electrice de navigatie. Aceste receptoare sincrone reprezinta referinta de curs pentru evaluarea celorlalte informatii referitoare la navigatie.
Traseul navei poate fi monitorizat cu ajutorul inregistratorului de curs.
fig.GC26
Sistemul de alimentare
Alimentarea ES presupune de fapt alimentarea giromotoarelor din interiorul girosferei. Transferul de energie are loc prin intermediul lichidului-suport astfel:
la girosferele alimentate trifazat, sunt folosite suprafetele conductive superioara, ecuatoriala si inferioara;
la girosferele alimentate monofazat, sunt folosite suprafetele conductive inferioara si superioara.
Pentru
a putea obtine turatii ale rotoarelor giro mai mari decat ![]() ,
se foloseste conversia dubla de energie.
,
se foloseste conversia dubla de energie.
Tensiunea alternativa a bordului este mai intai redresata (prima etapa de conversie) si apoi inversata (a doua etapa de conversie) intr-o tensiune alternativa cu frecventa mai mare decat a tensiunii alternative a bordului (50-60Hz).
Sistemul de termoreglare
Incalzirea si, respectiv racirea lichidului-suport sunt comandate automat pentru a pastra constanta temperatura mediului interstitiu.
Elementele care asigura aceasta automatizare sunt:
elementul termosensibil (traductor de prelevare a temperaturii);
adaptorul (interfata element termosensibil - element executor);
ansamblul climatizor format din elementele executoare (rezistente de incalzire si ventilator).
Elementul termosensibil este imersat in lichidul-suport. Prima conversie consta in activarea adaptorului pe baza alterarii temperaturii.
fig.G28
Sistemul de termoreglare
Referinte bibliografice
[1] Ahrendts, Joachim & CO, HUTTE - Manualul Inginerului, Editura Tehnica, Bucuresti, 1995
[2] Calueanu, D., Stan, St. s.a., Instalatii Electrice la Bordul Navelor, Editura Tehnica, Bucuresti, 1981
[3] Calugarita, Ghe. s.a., Tabele si Formule de Matematica, Fizica si Chimie, Editura Didactica si Pedagogica, Bucuresti, 1964
[4] Chirita, M., Pavica, V., Navigatie, Editura Militara, Bucuresti, 1959
[5] Dordea, s, Stadiul actual in domeniul sistemelor de guvernare navale - Referat doctorat, Universitatea "Dunarea de Jos", Galati, 1997.
[6] Dordea, s, Sisteme de guvernare cu actiune continua si comanda digitala - Referat doctorat, Universitatea "Dunarea de Jos", Galati, 1998.
[7] Dordea, s, Contributii la transferul de energie in sistemele electrohidraulice de Guvernare Navale - Referat doctorat, Universitatea "Dunarea de Jos", Galati, 1998.
[8] Dordea, s, A Quick Preparation of Standard 4 Supporting liquid, TCW Report, Anschutz, Kiel, 1989.
[9] Dordea, s, Gyro Synchro Transmisson, TCW Report, Anschutz, Kiel, 1989.
[10] Dordea, s, Gyro Step Transmisson, TCW Report, Anschutz, Kiel, 1989.
Dordea, s, Steering Controls, TCW Report, Anschutz, Kiel, 1989.
[12] Dordea, St., Transferul de energie in sistemele electrohidraulice de guvernare navale, Teza Doctorat, Universitatea "Dunarea de Jos" Galati, 2002
[13] Grumazescu, M., Stiubei, P., Instalatii de amplificare si de distributie a sunetului, Editura Tehnica, Bucuresti, 1959
[14] Stanciu, N. s.a, Dictionar tehnic de radio si televiziune, Editura Stiintifica si Enciclopedica, Bucuresti, 1975
[15] Tanasescu, T., s.a, Agenda tehnica, Editura Tehnica, Bucuresti, 1990
[16]***Anschtz, Feedback Unit, Kiel 1993
[17]***Anschtz, Feedback Unit, Kiel 1996
[18]***Anschtz, Follow-up Amplifier, Kiel 1990
[19]***Anschtz, Follow-up Steering Control, Kiel 1992
[20]***Anschtz, Follow-up Steering Control Amplifier, Analog Version, Kiel 1999
[21]***Anschtz, Follow-up Steering Control Amplifier, Switching Version, Kiel 1999
[22]***Anschtz, Gyro Compass Standard 12, Kiel 1993
[23]***Anschtz, Gyro Compass Standard 14, Kiel 1998
[24]***Anschtz, Magnetic Sonde, Kiel 1999
[25]***Anschtz, Service Information no.4
[26]***Anschtz, Service Information no.6
[27]***Anschtz, Service Information no.7
[28]***Anschtz, Service Information no.9
[29]***Anschtz, Service Information no.10
[30]***Anschtz, Service Information no.11
[31]***Anschtz, Service Information no.41
[32]***Anschtz, Service Information no.53
[33] ***Keiki.GLT-203, Tokio, 1989.
pentru orientarea pe mare, se mai foloseste, dar cu erori mult mai mari, compasul magnetic. Din punct de vedere cronologic, compasul magnetic a fost utilizat inainte de aparitia girocompasului.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 6878
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved