| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
PROIECTAREA AXELOR CINEMATICE
1 Consideratii generale
In scopul generarii unor suprafete complexe, masinile unelte NC sunt prevazute cu echipamente de conturare in doua sau trei axe, fapt ce le permite corelarea a doua sau trei miscari elementare.
La masinile unelte NC, miscarile operative complexe sunt rezultatul actiunii combinate a mai multor axe cinematice comandate numeric, fiecare dintre acestea realizand cate o miscare elementara.
In cazul unor masini unelte specializate pentru anumite operatii si piese (cum ar fi masinile de danturat cu comanda numerica), este necesar un numar mare de axe cinematice NC care efectueaza miscari corelate. Ca urmare si echipamentele de comanda trebuie sa fie adecvate.
In majoritatea cazurilor, atat la masinile unelte NC cat si la roboti industriali este necesara realizarea pe cale cinematica (prin combinarea efectului mai multor miscari elementare) a curbele generatoare din procesul de aschiere sau a curbelor dupa care are loc manipularea obiectelor in spatiul de lucru al robotului.
Se pune problema proiectarii axelor cinematice destinate actionarii masinilor unelte NC si a robotilor industriali.
Motoarele utilizate pentru actionarea axelor cinematice NC sunt motoare de turatie variabila.
In aceasta categorie sunt incluse:
motoarele electrice de curent continuu: n=f(U) ; n- turatia motorului; U -tensiunea;
motoarele electrice de curent alternativ: n=60*n/p n-frecventa; p-nr. perechilor de poli;
motoare electice pas cu pas: n=f(n n-frecventa impulsurilor de comanda;
motoare hidraulice: n=f(Q); Q-debitul;
Pentru motoarele prezentate mai sus se constata ca modificarea valorilor parametrilor U, n sau Q conduce la modificarea turatiei motorului. Astfel, turatia acestor motoare este variabila, iar sensul miscari poate fi inversat. Comanda axei se face prin comanda motorului, valoarea turatiei si sensul acesteia are efect direct asupra vitezei organului mobil.
Pentru a putea fi comandate, axele NC sunt prevazute cu sisteme de masurare a unor marimi (pozitie, viteza, tensiune, etc.). Din acest motiv o axa cinematica are in componenta senzorii necesari masurarii marimilor utilizate de echipamentul de comanda. Afirmatia de mai sus poate fi infirmata in cazul axelor actionate cu motoare pas cu pas, deoarece pozitia organului final este dependenta de numarul de impulsuri de comanda aplicate motorului. Motoarle pas cu pas pot fi comandate in bucla deschisa de comanda.
2 Senzori de pozitie. Senzori de viteza
Senzori de pozitie
Pentru masurarea pozitie organului final mobil al axei cinematice (sania de avans, arborele principal etc.) se utilizeaza se utilizeaza snzori (traductoare) liniare sau rotative. Pozitia organelor mobile care efectueaza deplasari liniare se masoara cu traductoare liniare de pozitie, iar cele care efectueaza miscari de rotatie cu traductoare rotatie.
La modul general, traductoarele de pozitie pot fi:
absolute: furnizeaza echipamentului informatii privind pozitia absoluta a organului mobil fata de sistemul de coordonate al masinii ("esti la cota 123.75mm");
incrementale: furnizeaza echipamentului informatii privind pozitia relativa a organului mobil fata de o pozitie anterioara ("te-ai deplasat cu cu +32.544mm"; echipamentul determina, prin insumare, valoarea absoluta a pozitiei).
Pentru a intelege functionarea si rolul unui traductor de pozitie, in figura 1 se prezinta schema de principiu a unui traductor incremental optic de rotatie (TIRO 2000).
Traductorul se compune dintr-un disc 1 ce se monteaza pe axul traductorului care se cupleaza cinematic cu ajutorul unui cuplaj elastic de axul a carei pozitie dorim sa o masuram. Discul 1 este prevazut cu o portiune cu fante transparente/mate, dispuse alternativ. Aceasta zona este strabatuta de un flux luminos, emis de o lampa 2 (LED) si concentrat de o lentila 3, care este captat de un fotoelement 4 (fototranzistor). Fluxul luminos trece prin fantele transparente ale dicului 1 in miscare si este focalizat pe lentila fotoelementului 4 producand un curent (semnal electric 5) ce este transmis blocului electronic de amplificare si formare a semnalelor. Diagrama semnalelor se prezinta in figura 7.2.
Determinarea vitezei de deplasare a unui sistem care poseda un traductor de pozitie se poate face foarte simplu, fara a fi necesar un senzor de viteza, prin calcule:
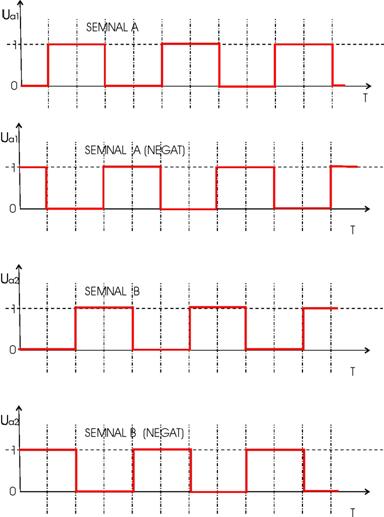
Fig. 7.2 Diagrama semnalelor.
Un traductor de viteza frecvent utilizat la masini unelte NC si la alte sisteme automate este tahogeneratorul de curent continuu. Acesta este un generator de curent continuu care genereaza o tensiune proportionala cu turatia rotorului, deci proportionala cu viteza:
Tensiunea electromotoare la bornele tahogeneratorului este data de relatia:
![]()
K-sensibilitatea tahogeneratorului; n turatia.
In mod usual sensibilitatea tahogeneratoarelor este: K=110 mV/rot/min.
7.3 Comanda axelor cinematice
Comanda motoarelor de actionare a axelor cinematice se poate face in bucla deschisa sau in bucla inchisa de comanda. Comanda in bucla deschisa prezinta un dezavantaj major legat de precizia de pozitionare redusa.
Comanda in bucla deschisa se preteaza axelor actionate cu motoare pas cu pas. Motoarele pas cu pas sunt constituite dintr-un convertor electromecanic care realizeaza conversia impulsurilor de comanda aplicate fazelor (infasurarilor) motorului intr-o miscare de rotatie ce consta din deplasari discrete de marime egala cu pasul motorului.
Comanda in bucla deschisa este in fapt o comanda fara reactie; semnalul de comnada nu este influientat de semnalul de iesire.
Comanda in bucla inchisa foloseste o bucla de reactie a semnalului de iesire care influienteaza semnalul de comanda.
Tipurile reprezentative de axe cinematice se prezinta in figurile 7.3 si 7.4. In fig. 7.3 se prezinta o axa cinematica de translatie, iar in fig. 7.4 o axa cinematica de rotatie. In ambele cazuri se poate regla atat viteza cat si pozitia organului de lucru.
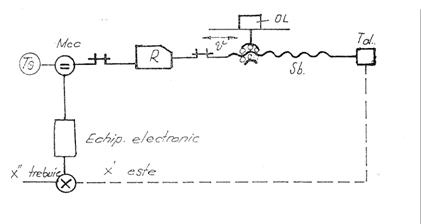
Fig. 7.3 Axa de translatie
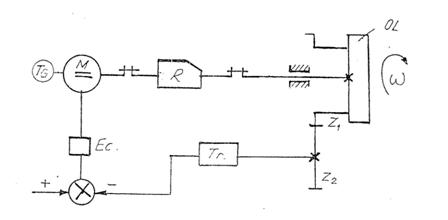
Fig. 7.4 Axa de rotatie
Doua scheme bloc de comanda a axelor cinematice din fig. 7.3 si 7.4. se prezinta in figurile 7.5 si 7.6.
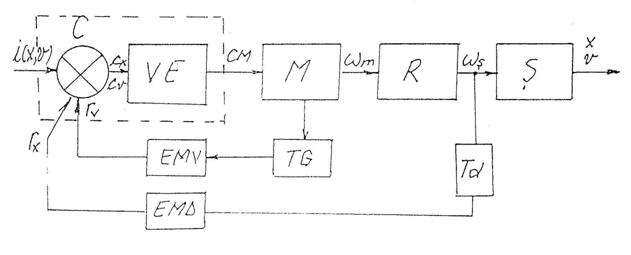
Fig. 7.5 Schema bloc pt. comanda axei de translatie
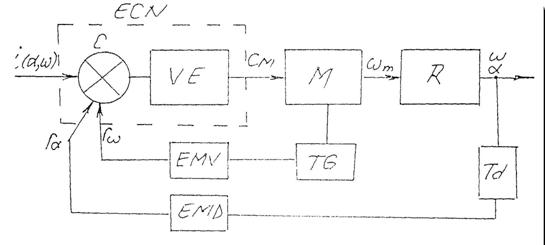
Fig. 7.6 Schema bloc pt. comanda axei de rotatie
Informatiile privind pozitia si viteza de deplasare (x, v sau a w) se introduc in echipamentul de comanda numerica ECN. ECN este alcatuit dintr-un element de comparatie C si un variator electronic VE. Comanda ce se transmite variatorului este data de relatia:
 (pt. fig.7.5)
(pt. fig.7.5)  (pt. fig.7.6)
(pt. fig.7.6)
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2766
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved