| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
STRUCTURA SI CINEMATICA MECANISMELOR
1 CUPLELE SI ELEMENTELE CINEMATICE
Mecanismele
si masinile sunt sisteme tehnice ale caror elemente compo-
nente sunt astfel concepute incat sa realizeze anumite functiuni precis
stabilite.
Un corp solid rigid liber in
spatiu are sase grade de libertate, adica poate
realiza sase miscari simple independente si anume:
Corpul solid rigid component
al unui mecanism este denumit element
cinematic. Doua elemente ale unui mecanism aflate in contact permanent
printr-o
legatura care permite mobilitatea cel putin a unuia din ele, formeaza o cupla
cinematica.
Cupla cinematica introduce
restrictii in miscarile relative ale
elementelor; aceste restrictii se numesc conditii de legatura si
numarul lor
se noteaza cu S.
Intre numarul gradelor de libertate L ale unui corp
liber in spatiu si
numarul conditiilor de legatura exista relatia:
L=6-S (1)
iar intre numarul gradelor
de libertate ale unui corp in plan si numarul
conditiilor de legatura exista relatia:
L = 3 -S (
deoarece un corp liber in plan are doar trei grade de libertate.
2 CLASIFICAREA CUPLELOR CINEMATICE
Clasificarea cuplelor cinematice se face dupa urmatoarele criterii:
Dupa criteriul conditiilor de legatura, cuplele cinematice se impart in cinci clase.
Clasa unei cuple cinematice este data de numarul gradelor de libertate suprimate si se obtine cu relatia: S = 6 -L (3)
Cuplele inferioare se caracterizeaza prin faptul ca cele doua elemente ale lor se afla in contact pe o suprafata, iar la cuplele superioare contactul se face pe o linie sau intr-un punct.
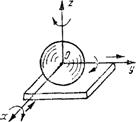
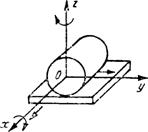
Fig. 1 Cupla cinematica de cls. I Fig. 2 Cupla cinematica de cls. a II-a
Cupla cinematica de clasa I (fig. 1).
Bila (sfera) asezata pe o placa plana poate realiza miscari de translatie de-a lungul axelor x si y si trei miscari de rotatie in jurul celor trei axe de coordonate.
Rezulta: S = 6 - L = 6 - 5 = 1
si are simbolul C1.
Dupa criteriul contactului intre elemente este o cupla superioara (contact punctiform).
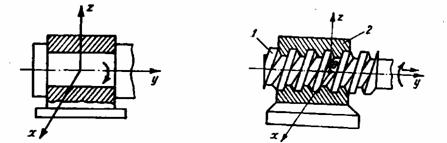
Fig. 5 Cupla cinematica de cls. a V-a Fig. 6 Cupla cinematica de cls. a V-a
Cupla cinematica de clasa a V-a (fig. 5).
Corpul cilindric prevazut cu umeri, asezat intr-un alezaj cilindric, poate realiza doar miscarea de rotatie in jurul axei y.
Rezulta: S = 6 - L = 6 - 1 = 5 (5)
si are simbolul C5. Dupa criteriul contactului intre elemente este o cupla inferioara.
Cupla cinematica la care doua sau mai multe miscari sunt functional legate intre ele - cupla cinematica elicoidala sau cupla surub-piulita (fig. 6 )
3 LANTURI CINEMATICE. MECANISME
Se numeste lant cinematic o succesiune de elemente cinematice legate prin cuple cinematice, in care fiecare element are cel putin un grad de libertate. Lanturile cinematice pot fi:
inchise (elementele componente formeaza un contur inchis - fig. 7 a);
deschise (elementele componente formeaza un contur deschis - fig. 7 b si c);
simple (fiecare din elementele ce compun lantul cinematic este legat prin cuple cinematice de cel mult doua elemente - fig. 7 a si b);
complexe (cel putin unul din elementele sale este legat prin cuple cinematice la mai mult de doua elemente - 7 c);
desmodroame (elementele componente sunt astfel legate intre ele astfel incat oricarei pozitii a elementului conducator ii corespund pozitii bine determinate pentru fiecare element condus);
nedesmodroame (nu au proprietatea anterioara).
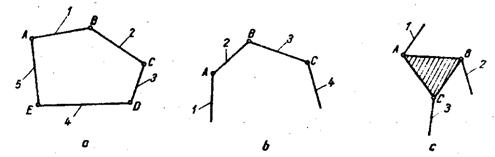
Fig. 7 Lanturi cinematice
a - simplu, plan, inchis; b - simplu, plan, deschis; c - complex, deschis
Mecanismul este un lant cinematic inchis, simplu sau complex, plan sau spatial, desmodrom care are unul din elementele sale fix numit element de baza.
4. MOBILITATEA LANTURILOR CINEMATICE SI A MECANISMELOR
Miscarea unui lant cinematic este caracterizata prin gradul sau de libertate notat cu L iar a unui mecanism prin gradul de mobilitate notat cu M.
Elementele lantului cinematic sunt legate intre ele prin cuple cinematice de diferite clase: 1,..5, care introduc anumite restrictii miscarii, denumite conditii de legatura.
Astfel numarul gradelor de libertate al unui lant cinematic cu l elemente va fi:
L= 6l - ![]() , (6)
, (6)
unde Ci este numarul cuplelor cinematice de clasa i.
Pentru gradul de mobilitate al mecanismului rezulta relatia:
M= 6n - ![]() (7)
(7)
unde n este numarul elementelor mobile ale lantului cinematic.
Relatia (7) poarta denumirea de formula structurala a mecanismului spatial in forma generala. Pentru mecanismele plane formula structurala este: M = 3n - 2 C5 -C4
B. INTRODUCERE IN DINAMICA MECANISMELOR
Dinamica mecanismelor studiaza miscarea mecanismelor sau a masinilor luand in considerare fortele care actioneaza asupra acestora.
Se pot rezolva doua probleme de baza
se da analitic sau grafic legea de miscare a mecanismului si se cere sa se determine fortele care asiguraaceasta miscare
se considera date fortele si se cere determinarea legii de miscare a mecanismului
5 DETERMINAREA FORTELOR DE INERTIE
 Fortele de inertie produc solicitari
suplimentare, maresc presiunile in cuplele cinematice, influenteaza randamentul
mecanismului sau masinii si vibrostabilitatea acestora.
Fortele de inertie produc solicitari
suplimentare, maresc presiunile in cuplele cinematice, influenteaza randamentul
mecanismului sau masinii si vibrostabilitatea acestora.
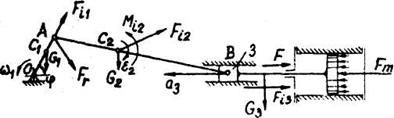
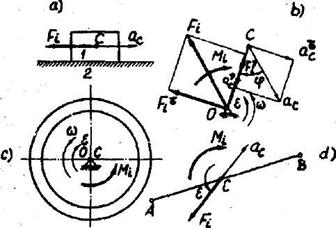
Fig. 8 Forte de inertie
Pentru elementul care executa o miscare de translatie, fig. 8 a, forta de inertie se determina cu relatia: Fi = mac
unde m este masa elementului, ac este acceleratia centrului de greutate a elementului.
In cazul cand elementul executa o miscare da rotatie in jurul axei fixe O, care nu coincide cu centrul de greutate C (fig.8 b), cu viteza unghiulara ω si acceleratia unghiulara ε, apare vectorul principal el fortelor de inertie Fi, aplicat in centrul de rotatie a elementului (in punctul O), si este dirijat in sens contrar cu acceleratia centrului de greutate ac, iar momentul principal al fortelor de inertie Mi este dirijat in sens contrar cu acceleratia unghiulara ε.
Marimea vectorului principal al fortelor de inertie este:
Fi = mac
= mrc ![]()
unde rc este distanta de la axa de rotatie O pana la centrul de greutate C.
Momentul principal al fortelor de inertie se determina cu relatia:
Mi = ε I0 (10)
unde I0 este momentul de inertie al elementului in
raport cu axa de rotatie O, si are expresia: I0
= m ![]()
unde ρ este raza de inertie a elementului in raport cu axa de rotatie.
Daca elementul se roteste uniform, ε = 0.
La rotirea elementului in jurul axei, care coincide cu centrul de greutate (fig.8 c), vectorul principal al fortelor de inertie Fi = 0, deoarece rc = 0.
Momentul de inertie se determina cu relatia:
Ic = m ![]()
Acesta este cazul caracteristic pentru organele de masini de tip disc care se rotesc:
Daca acestea se rotesc uniform, ε = 0, Mi devine zero, ceea ce inseamna ca asupra cuplelor cinematice nu actioneaza sarcini dinamice exterioare. Daca elementul executa o miscare plana generala, aceasta miscare se descompune in centrul de greutate C intr-o translatie si o rotatie - fig. 8 d.
Vor apare astfel forta de inertie Fi = mac si momentul Mi = ε Ic .
Cazul este caracteristic pentru biela mecanismului biela-manivela (fig.9).
|
|
Fig. 9 Mecanismul biela -manivela
6 ECHILIBRAREA ORGANELOR DE MASINI AFLATE IN MISCARE DE ROTATIE
Dezechilibrul pieselor duce
la aparitia fortelor de inertie si a momentelor fortelor de inertie, care
produc vibratia masinilor si incarca suplimentar lagarele arborilor si arborii.
La miscarea unui corp la care centrul de greutate situat pe axa principala nu
se gaseste si pe axa de rotatie (axa
fusurilor si a lagarelor), ia nastere o forta de inertie radiala, data de
relatia: Fi = m e ![]() (13)
(13)
unde m este masa corpului; e este excentricitatea (distanta radiala de la centrul de greutate la axa de rotatie); ω este viteza unghiulara.
Pentru anularea reactiunilor ce apar in lagare este necesar ca centrul de greutate sa fie adus pe axa de rotatie (axa fusurilor). Din punct de vedere practic, realizarea acesteia este dificila. Este mai simplu sa se deplaseze centrul de greutate pe axa de rotatie, adaugand mase suplimentare la masa corpului.
Tinand cont de relatia (13) se poate scrie
ma r = m e (14)
unde ma este masa adaugata; r este distanta radiala la care se gaseste masa adaugata.
Echilibrarea prin care se realizeaza coincidenta dintre centrul de greutate a corpului si axa de rotatie se numeste echilibrare statica. Un corp echilibrat static nu se va roti daca se afla numai sub influenta gravitatiei. El poate fi rotit in orice pozitie si lasat liber, el va ramane nemiscat in aceasta noua pozitie. Daca corpul nu este echilibrat static, atunci din orice pozitie asezata initial, el va tinde sa se roteasca astfel incat centrul de greutate sa ocupe pozitia cea mai de jos posibila.
Daca un corp este echilibrat dinamic, prin definitie, el este echilibrat si static; reciproca nu este insa adevarata.
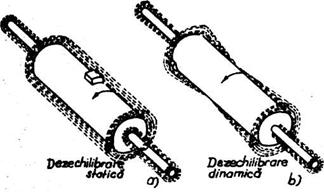
In figura este aratat un corp de rotatie cu dezechilibru static si unul cu dezechilibru dinamic.
Daca corpul prezinta dezechilibru static axa sa descrie in spatiu o suprafata cilindrica (fig. 10 a)
Cind exista un cuplu de dezechilibru, axa corpului descrie doua suprafete conice care au virfurile in centrul de greutate al acestuia (fig.10 b).
|
|
Fig. 10 Corp de rotatie cu dezechilibru static (a) si cu dezechilibru dinamic (b)
Echilibrarea dinamica a diferitelor organe de masini, care executa miscari de rotatie, se face pe masini de echilibrat speciale.
Calitatea unei echilibrari corespunzatoare, in general, se apreciaza prin functionarea linistita a ansamblului studiat.
De multe ori insa mersul neregulat al masinilor este influentat si de alti factori in afara dezechilibrului, ca de exemplu
nesimetria lagarelor,
alinierea necorespunzatoare,
efectele aero si hidrodinamice etc.
Din aceasta cauza masurarea amplitudinii vibratiilor nu va da indicatii directe asupra marimii dezechilibrarii si nici nu va stabili daca micsorarea dezechilibrarii va conduce la un mers mult mai linistit.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3684
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved