| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
In practica, receptorul GPS trebuie sa refaca codul PRN care a fost transmis de satelitul (SV) a carui existenta este cautata de catre receptor, apoi acesta trebuie sa deplaseze faza replicii codului pana cand aceasta va corela cu codul PRN al satelitului. Aceasta corelare a proprietatilor se produce pana cand codul PRN transmis intercoreleaza cu codul replica ca si cum s-ar produce un proces de autocorelare matematica pentru emiterea codului PRN. Cand faza codului replica al receptorului GPS egaleaza faza codului care vine de la satelit, atunci corelatia este maxima. Cand faza codului replica este deplasata cu mai mult de un chip in oricare parte a fazei codului care vine de la satelit, atunci corelatia este minima. Aceasta este metoda dupa care receptorul GPS detecteaza semnalul satelitului in dimensiunea cod-faza pentru achizitia si urmarirea lui. Este important sa intelegem ca acest receptor GPS trebuie de asemenea sa detecteze satelitul in dimensiunea purtatoare-faza si sa reproduca frecventa purtatoarei tinand cont si de efectul Doppler asupra ei (si de obicei se realizeaza sincronizarea fazei purtatoarei cu semnalul satelitar). Astfel, procesul de achizitie si cautare a semnalului GPS este un proces bidimensional de reproducere a semnalului (cod si purtatoare).
In domeniul dimensiunii cod, receptorul GPS realizeaza procesul de intercorelare in primul rand cautand faza satelitului dorit si apoi urmarind starea codului satelitului prin ajustarea ratei nominale de imprastiere a replicii codului generator pentru a compensa efectul Doppler indus asupra codului PRN al satelitului datorita variatiilor relative ale liniei de vizibilitate directa dintre receptor si satelit. De asemenea, exista si un efect Doppler aparent asupra codului urmarit in bucla cauzat de catre offset-ul (deriva) frecventei oscilatorului de referinta al receptorului fata de frecventa specificata a fi respectata. Eroarea acestui efect, care este o eroare sistematica a timpului ce determina solutia navigatiei, este destul de mica pentru codul urmarit in bucla si este uzual neglijata. Procesul de corelare a codului este implementat ca o multiplicare in timp real a fazei deplasate a codului replica fata de codul sosit de la satelit, urmand dupa aceea un proces de integrare si descarcare. Obiectivul receptorului GPS este de a tine exact faza codului replica generat la maximul corelatiei cu faza codului satelitului dorit.
Totusi, daca receptorul nu poate ajusta (acorda) simultan propriul semnal purtator replica astfel incat sa se potriveasca frecventei purtatoare a satelitului dorit, atunci amplitudinea semnalului procesului de corelare este mult atenuata de catre caracteristica raspunsului in frecventa a receptorului GPS. In consecinta cu aceasta, receptorul nu va putea urmari satelitul. Daca semnalul a fost urmarit cu succes aceasta se datoreaza faptului ca codul si frecventa au fost replicate cu succes in timpul procesului de cautare, dar daca receptorul pierde ulterior urmarirea frecventei satelitului, atunci receptorul pierde de asemenea si urmarirea codului. Astfel, in domeniul deviatiei Doppler a frecventei purtatoare, receptorul GPS realizeaza procesul de gasire a purtatoarei mai intai cautand deviatia Doppler a frecventei purtatoarei a satelitului dorit si apoi urmarind starea efectului Doppler asupra purtatoarei satelitare. Aceasta se realizeaza prin ajustarea frecventei purtatoare a propriei replici generate pentru a compensa efectul Doppler indus asupra semnalului purtator al satelitului datorita dinamicii relative ale liniei de vizibilitate directa dintre receptor si satelit. De asemenea, exista si eroarea efectului Doppler aparent asupra purtatoarei urmarita in bucla cauzat de catre offset-ul (deriva) frecventei oscilatorului de referinta al receptorului fata de frecventa specificata a fi respectata. Aceasta eroare, care este comuna tuturor satelitilor urmariti de catre receptor, este determinata de catre un filtru de navigatie ca o eroare sistematica a timpului in unitati de secunde per secunda.
Procesul bidimensional de urmarire si cautare poate fi foarte bine explicat si inteles in pasi progresivi. Explicarea este usoara in ordine inversa fata de evenimentele care au loc in receptorul GPS. Procesul bidimensional de cautare si achizitie este usor de inteles daca este explicat mai intai procesul bidimensional de urmarire in regim stationar. Procesul bidimensional de urmarire in cod si purtatoare este usor de inteles daca urmarirea purtatoarei este explicat mai intai. Aceasta este secventa explicarii care ar trebui folosita. Mai intai ar trebui fi gasita explicarea intr-un context generic al arhitecturii receptorului GPS cu minimum de ecuatii utilizate. La o privire amanuntita ar trebui folosite explicatii mult mai detaliate ale buclelor de urmarire ale codului si purtatoarei, incluzand cele mai folosite ecuatii.
2. Receptorul GPS urmarind codul si purtatoarea
Majoritatea modelelor moderne de receptoare GPS sunt receptoare digitale. Aceste receptoare au evoluat rapid la nivele din ce in ce mai ridicate ale integrarii componentelor digitale si acest ritm este de asteptat sa continue. Din acest motiv, pentru o diagrama bloc detaliata a unui receptor modern digital GPS va fi folosita o reprezentare a unei arhitecturi generale a unui receptor GPS ca in figura 1.
Semnalele GPS de radiofrecventa de la toti satelitii vazuti sunt receptionate de catre o antena magnetica cu polarizare circulara (RHCP - right-hand circularly polarized) cu lobul de castig aproape semisferic. Aceste semnale RF sunt amplificate de un preamplificator de zgomot redus, care regleaza efectiv zgomotul. Acesta poate avea un filtru trece banda pasiv intre preamplificator si antena pentru a minimiza interferentele din afara benzii de RF. Aceste semnale RF amplificate si conditionate sunt reconvertite la o frecventa intermediara (IF) folosind semnalul mixat cu frecvente de la oscilatorul local (LOs). Oscilatorul local este alcatuit dintr-un oscilator de referinta si dintr-un sintetizor liniar de frecventa proiectat pentru receptor. Un oscilator local pentru faza de reconversie este necesar. Reconversia pe doua nivele catre frecventa intermediara este tipica, dar reconversia pe un singur nivel si chiar esantionarea digitala direct din banda L sunt de asemenea folosite. Procesul de mixare cu semnalul oscilatorului local genereaza ambele benzi laterale superioara si inferioara, asa ca benzile laterale inferioare sunt selectate iar benzile laterale superioare impreuna cu semnalele parazite sunt rejectate de catre un filtru trece banda postmixer. Efectele Doppler asupra semnalelor si codurile PRN raman neschimbate dupa procesul de mixare. Doar frecventa purtatoare este atenuata.
Figura 1. Receptorul GPS digital - diagrama bloc generala
La frecventa intermediara (IF) au loc procesul de conversie analog-digitala (A/D) si functiile de control automat al castigului (AGC-automatic gain control). Frecventa intermediara IF trebuie sa fie suficient de ridicata pentru a furniza o latime de banda laterala care sa suporte frecventa de taiere a codului PRN. Un filtru antialias IF trebuie sa reduca zgomotul (semnale scapate din afara benzii) la nivele acceptabil de mici astfel incat acest zgomot sa fie nesemnificativ in banda de trecere fata de semnalul GPS pentru a se realiza corect procesul de conversie analog-digitala. La nivelul frecventei intermediare IF semnalele tuturor satelitilor vazuti sunt bruiate de zgomotul termic.
In acest punct, semnalele digitale de frecventa intermediara IF sunt gata spre a fi procesate de fiecare canal digital din cele N ale receptorului. Nu prin demodulare se obtine clasificarea, ci doar prin conditionarea semnalului si conversia digitala la IF. Aceste functii ale canalelor digitale ale receptorului sunt uzual implementate intr-unul sau mai multe circuite integrand aplicatia specifica (ASICs - apllication specific integrated circuits). Functia de procesare a receptorului este asigurata de un microprocesor. Microprocesorul da performantele functiilor din banda de baza, dar asigura si functiile de decizie asociate pentru controlul si preprocesarea fiecarui canal digital al receptorului. Frecvent, un singur microprocesor comanda receptorul, calculeaza datele necesare navigatiei si functiile inerfetei cu utilizatorul.
Figura 2. prezinta o diagrama bloc tipica in detaliu al unuia dintre canalele receptorului digital care au la intrare aplicate semnalele IF digitale. Pentru simplificare, sunt ilustrate doar functiile asociate buclelor de urmarire in cod si purtatoare si canalul receptorului se presupune a urmari semnalul unui satelit stationar. In figura 2., mai intai semnalul IF digital care este extras din purtatoare (plus efectul Doppler) de catre replica purtatoarei (care tine si ea cont de efectul Doppler) produce semnale in faza (I) si in cuadratura (Q) de date esantionate. Se observa ca semnalul replica al purtatoarei este mixat cu toate semnalele satelitare GPS dar si cu zgomotul la semnalul digital de frecventa intermediara IF. Semnalele digitale I si Q de la iesirile mixerelor au relatiile de faza dorite care sa duca la detectarea purtatoarei satelitului dorit. Totusi, procesele de demodulare in cod care coboara aceste semnale la banda de baza nu au fost inca aplicate. Prin urmare, semnalul I ar trebui sa fie in cea mai mare parte zgomot termic inmultit cu sinusoida semnalului replica digital (pentru a se potrivi purtatoarea satelitului la IF) iar semnalul Q de la iesirea mixerului in cuadratura ar trebui sa fie produsul in cea mai mare parte a zgomotului termic cu cosinusoida replicii digitale (pentru a se potrivi purtatoarea satelitului la IF). Semnalul satelitului dorit ramane blocat in zgomot pana cand semnalele I si Q sunt coborate in banda de baza de catre procesul de decodare care urmeaza. Semnalele replica purtatoare (tinand cont si de
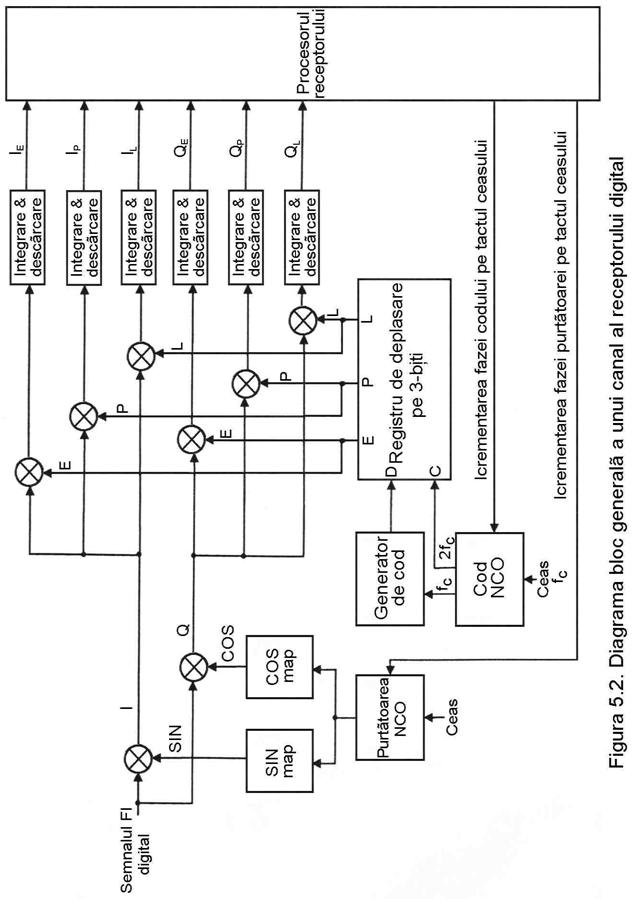
efectul Doppler asupra purtatoarei) sunt sintetizate de catre oscilatorul controlat numeric (NCO - numerical controlled oscilator) si separate aplicand functiile sinus si cosinus.
Mai tarziu, va fi aratat care NCO produce o functie in trepte a carei perioada este perioada replicii dorite plus efectul Doppler. Functiile asociate sinus si cosinus convertesc fiecare amplitudine discreta a functiei in trepte catre amplitudinea discreta corespunzatoare functiilor sinus si, respectiv, cosinus. Producand semnalele I si Q defazate cu 90O, amplitudinea semnalului rezultant poate fi calculata prin suma vectorilor componentelor I si Q iar faza unghiulara cu referire la axa I poate fi determinata cu arctangenta lui I/Q. Pentru inchiderea buclei operatiei, purtatoarea NCO e controlata de catre procesorul receptorului prin bucla de urmarire a purtatoarei. In operatia de prindere in bucla a fazei (PLL - phase lock loop - bucla inchisa de faza), obiectivul buclei de urmarire a purtatoarei este de a mentine eroarea fazei intre replica purtatoarei si semnalele purtatoare sosite de la satelit la zero. Orice dezacordare a fazei replicii purtatoarei fata de faza semnalului purtator sosit de la satelit produce o deviatie de faza diferita de zero imediata asupra modulelor vectorilor I si Q astfel ca schimbarea valorii si directiei fazei pot fi detectate si corectate de bucla de urmarire a purtatoarei. Cand PLL prinde faza, semnalul I este maxim iar semnalul Q este aproape zero.
In figura 2., semnalele I si Q sunt atunci corelate cu replicile viitoare(early), momentana(prompt) si intarziata(late) ale codului (plus efectul Doppler asupra codului) sintetizate de catre codul generator, un registru de deplasare pe trei biti si codul NCO. Pentru inchiderea buclei operatiei asupra codului, codul NCO este controlat de catre procesorul receptorului prin bucla de urmarire a codului. In acest exemplu, blocul codului NCO produce dublarea frecventei de baza a codului generator, 2 fc, aceasta fiind apoi furnizata registrului de deplasare pe trei biti. Frecventa de baza a codului generator, fc, care contine rata de imprastiere (chipping rate) a codului (plus efectul Doppler asupra codului), este trimisa catre generatorul de cod. Folosind aceasta combinatie, registrul de deplasare produce trei faze ale codului generator de iesire, fiecare faza deplasata fiind separata de chip - rata codului de imprastiere . Nu se arata controalele asupra generatorului de cod care permit procesorului receptorului sa seteze initial starile fazei de urmarire a codului, care sunt necesare in timpul procesului de cautare si achizitionare a codului. Faza replicii instantanee a codului se potriveste cu faza codului sosit de la satelit producand maximul corelatiei daca aceasta urmareste faza codului sosit de la satelit. In aceste circumstante, faza viitoare se gaseste cu chip mai devreme si faza intarziata se gaseste cu chip mai tarziu referite la faza codului primit de la satelit si aceste corelatoare produc aproape jumatatea corelatiei maxime. Orice abatere a fazei codului replica fata de faza codului replica sosit de la satelit produce o diferenta in magnitudinea vectoriala a iesirilor corelate prematur si intarziat astfel incat marimea si directia fazei se schimba putand fi detectate si corectate de catre bucla de urmarire a codului.
2.1. Predetectia prin integrare
Predetectia este procesarea semnalului dupa ce semnalul IF a fost convertit in banda de baza dupa procesele de demodulare si decodare, dar anterior va fi trecut printr-un discriminator de semnal; care este, anterior procesului de detectie a semnalului neliniar. Operatiile predetectiei digitale-numerice prin integrare si descarcare se produc dupa procesele de demodulare si decodare. Din aceasta cauza se acumuleaza numere foarte mari desi pentru procesul de conversie analog-digitala la frecventa intermediara, IF, este tipica cuantizarea doar pe trei biti de rezolutie.
Figura 2. prezinta trei corelatoare complexe necesare pentru a produce trei componente in faza care integrate si descarcate produc IE, IP, IL si trei corelatoare complexe necesare pentru a produce trei componente in cuadratura care integrate si descarcate produc QE, QP, QL. Procesele de eliminare a codului si a purtatoarei trebuie sa aiba o rata de esantionare corespunzatoare, care este in jur de 5 MHz pentru codul C/A si 50 MHz pentru codul P(Y). Registrele de acumulare din blocurile de integrare & descarcare furnizeaza procesorului prin filtrare si reesantionare o rata de intrare in banda de baza, care este in jur de 200 Hz (ea putand fi mai mare sau mai mica in functie de largimea de banda a predetectiei). Rata de 200 Hz este destul de aproape de frecventa de intrerupere a microprocesoarelor moderne, o rata de 5 sau 50 MHz nemaiputand fi procesata. Asa se explica de ce procesele de mare viteza, dar simple, sunt implementate de obicei intr-un ASIC digital pe cand procesele de mica viteza, dar complexe, sunt implementate cu un microprocesor.
Procesul hardware de integrare & descarcare impreuna cu procesul de prelucrare al integrarii & descarcarii semnalului in banda de baza definesc timpul de predetectie (prin integrare). Acest timp de predetectie este un compromis in proiectare. El trebuie sa fie cat mai mare posibil pentru a micsora interferenta in radiofrecventa si trebuie sa fie cat mai mic posibil pentru a lucra sub conditiile de suprasolicitare dinamica a semnalului.
2.2. Procesarea semnalului in banda de baza
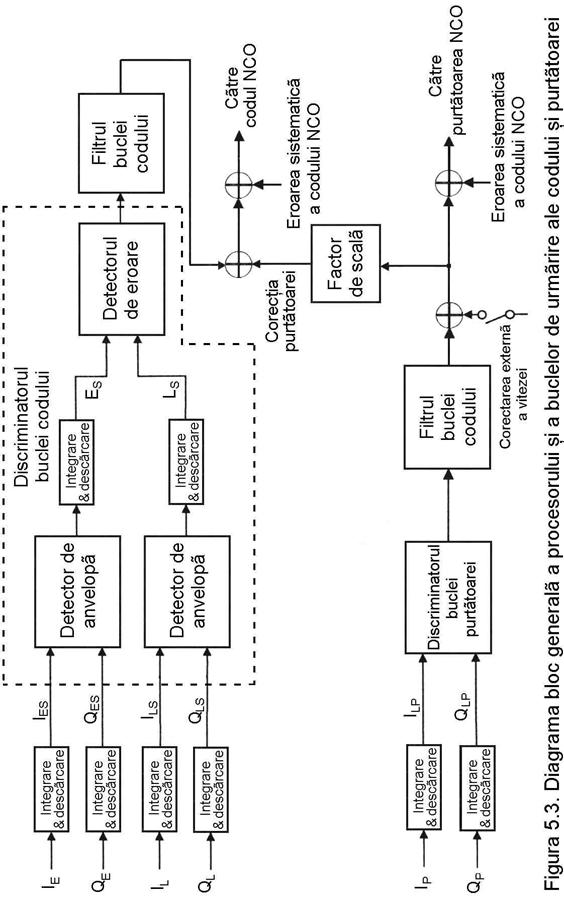
Figura 3. ilustreaza buclele tipice de urmarire a purtatoarei si a codului in banda de baza pentru un canal al receptorului in modul de operare cu bucla inchisa. Functiile sunt tipic executate in procesorul receptorului aratat in figura 2.. Combinarea functiilor de procesare ale urmaririi semnalului in cod si purtatoare in banda de baza si demodularea si decodarea canalului receptorului digital si functiile predetectiei integrate formeaza buclele de urmarire a codului si purtatoarei ale unui canal al receptorului digital GPS.
Functiile in banda de baza sunt implementate uzual prin soft integrat (microprograme, microinstructiuni). Microprogramele trebuiesc scrise o singura data intrucat microprocesorul executa toate programele secvential (spre deosebire de procesarea paralela, simultana care trebuie realizata in ASIC-urile receptorului digital). Prin urmare, programul microprocesorului poate fi proiectat, pentru a putea fi intrerupt si apoi reluat, cu o singura zona cu variabile pentru fiecare canal al receptorului. Aceasta reduce memoria programului necesara si asigura fiecarui receptor functii identice de procesare in banda de baza.
Cele trei perechi complexe de semnale I si Q in banda de baza din receptorul digital pot fi reesantionate din nou prin integrare si descarcarea acumulatorilor. Durata totala rezultata din functiile integrarii si descarcarii ale receptorului si ale procesorului stabileste timpul de predetectie integrata a semnalului. In mod normal, acesta nu poate depasi 20 msec, care inseamna o frecventa a mesajului de date de navigatie de 50 Hz.
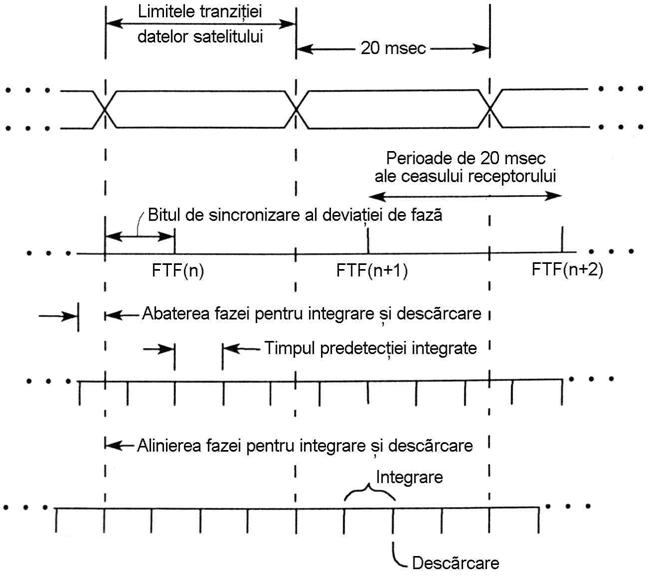
Figura 4. Sincronizarea fazei intervalelor predetectiei prin integrare si descarcare
cu intervalul de tranzitie al datelor satelitului
Figura 4. ilustreaza sincronizarea fazei necesara pentru a preveni suprapunerea intervalelor predetectiei prin integrare si descarcare peste intervalul de tranzitie al datelor satelitului. Limitele de inceput si de sfarsit pentru aceste functii de integrare si descarcare nu trebuie sa se gaseasca intre limitele tranzitiei bitilor de date ai satelitului deoarece acesti biti se schimba mereu, schimband ulterior si semnalele de date I si Q rezultate dupa integrare. Daca intervalul se suprapune, semnalul rezultat dupa predictia integrata pe acest interval va fi compromis. Uzual, in timpul cautarii initiale a receptorului nu se stie unde sunt localizate limitele tranzitiei bitilor de date. Atunci, degradarea preciziei trebuie a fi acceptata pana cand prin procesul de sincronizare acesti biti sunt localizati. Ca si in figura 4., de obicei intervalele de tranzitie ale datelor satelitului nu se sincronizeaza cu intervalele de 20 de msec ale ceasului receptorului, un asemenea interval numindu-se mai departe cadru de timp fundamental (FTF - fundamental time frame). Offset-ul fazei este privit ca "bitul de sincronizare al deviatiei de faza", deoarece procesul sincronizarii de bit al satelitului determina initial acest offset al fazei. In general, bitul de sincronizare al deviatiei de faza este diferit pentru fiecare satelit urmarit. Bitul de sincronizare al deviatiei de faza se schimba odata cu schimbarea distantei satelitului.
2.3. Sintetizarea digitala a frecventei
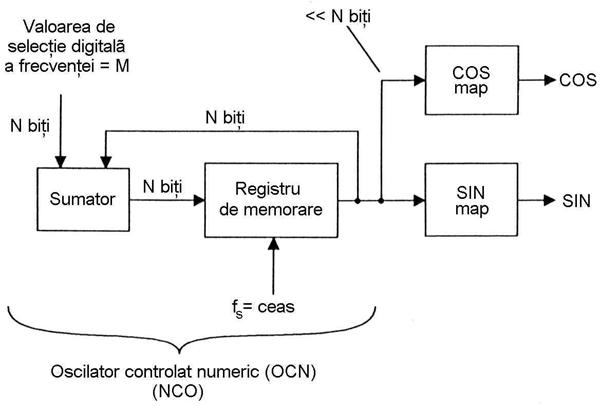
In acest exemplu de proiectare generala, ambele bucle de urmarire a codului si purtatoarei utilizeaza un NCO (numerical controlled oscilator). Un ciclu al replicii purtatoarei si un ciclu al replicii codului se termina de fiecare data la depasirea (overflow-ul) oscilatorului controlat numeric (NCO).
O diagrama bloc a purtatoarei oscilatorului controlat numeric si asocierea (tabelarea, maparea) functiilor sinus si cosinus sunt prezentate in figura . Functiile de mapare (asociere) convertesc la iesire amplitudinea functiei in trepte a oscilatorului controlat numeric in functiile trigonometrice aproximative, asa cum se arata in figura 7.(b,c).
N =
lungimea registrului de memorare  = frecventa de
iesire
= frecventa de
iesire
2N
= marimea contorului ![]() = rezolutia in
frecventa
= rezolutia in
frecventa
Figura Diagrama bloc a sintetizorului digital de frecventa
Figura 7. ilustreaza idea de baza a proiectarii sintetizorului digital de frecventa.
|
Grade |
Registru de memorare |
SIN map |
COS map |
|
| |||
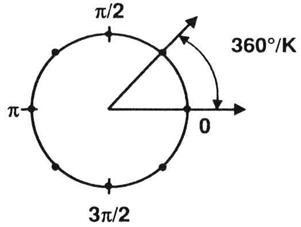
Maparile pentru J = 3, K = 23 = 8
Observatii:
Numarul de biti, J, determina iesirile sinusului si cosinusului. Domeniul fazei de 360O este divizat in 2J = K puncte ale fazei.
K valori compun fiecare forma de unda, o valoare per punct de faza. Fiecare valoare reprezinta amplitudinea formei de unda ce trebuie a fi generata in acel punct de faza. Cei J biti superiori ai registrului de memorare sunt folositi pentru a determina adresa amplitudinii formei de unda.
Rata cu care este parcurs domeniul fazei determina frecventa formei de unda de la iesire
Eroarea maxima a amplitudinii este: eMAX P/K.
Eroarea aproximativa a amplitudinii este: e = 2P/K [cos F(t)], unde F(t) este
unghiul fazei.
Figura 7. Proiectarea sintetizorului digital de frecventa
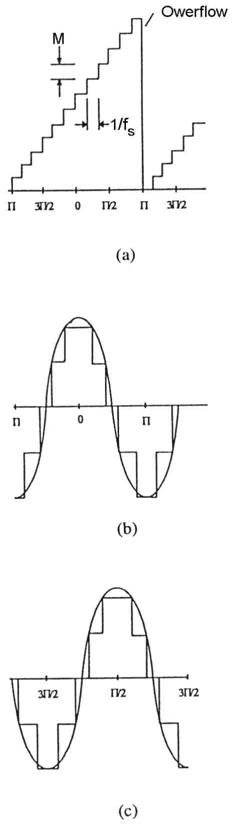
Figura 6. Sintetizarea formelor de unda digitale: (a) iesirea NCO,
(b) iesirea COS map, (c) iesirea SIN map
2.4. Corectia purtatoarei asupra buclei codului
In figura 3., iesirea filtrului buclei purtatoarei este ajustata cu un factor de scala si adunata iesirii filtrului de buclei codului pentru corectare. Aceasta se numeste bucla codului corectata de purtatoare. Factorul de scala este necesar deoarece efectul Doppler asupra semnalului este invers proportional cu lungimea de unda a semnalului. De asemenea, pentru aceeasi viteza relativa intre satelit si receptorul GPS, efectul Doppler asupra ratei de imprastiere a codului este mult mai mic fata de efectul Doppler asupra purtatoarei in banda L. Factorul de scala care compenseaza aceasta diferenta in frecventa este dat prin:
factor de scala = ![]() (adimensional)
(adimensional)
unde
Rc = rata de imprastiere a codului (Hz)
= Ro pentru codul P(Y) = 10.23 106 chips/sec
= Ro/10 pentru codul C/A = 1.023 106 chips/sec
fL = purtatoarea in banda L (Hz)
Ro pentru L1
Ro pentru L2
Tabelul 1. Arata trei combinatii practice ale acestui factor de scala.
Tabelul 1.
Factorii de scala pentru codul corectat de purtatoare
Frecventa purtatoare Rata codului (chips/sec) Factorul de scala
L1 = 154 Ro C/A = Ro/10 1/1.540 = 0.00064935
L1 = 154 Ro P(Y) = Ro 1/154 = 0.00649350
L2 = 120 Ro P(Y) = Ro 1/120 = 0.00833333
Bucla purtatoarei trebuie sa furnizeze mereu corectia asupra buclei codului deoarece bucla purtatoarei este mult mai putin afectata de zgomot decat bucla codului si de aceea este mai exacta. Corectia buclei purtatoarei inlatura toate variatiile virtuale ale liniei de vizibilitate directa reflectate asupra buclei codului, astfel ca filtrului buclei purtatoarei poate fi facut cu ordinul mai mic, timpul predetectiei integrate poate fi facut mai mare si banda de lucru a buclei codului poate fi facuta mult mai ingusta decat pentru cazul necorectarii, prin aceasta crescand puterea de urmarire si reducand efectul zgomotului asupra marimilor buclei de urmarire a codului. Intrucat ambele bucle ale codului si purtatoarei trebuie sa mentina urmarirea, aceasta inseamna ca nu este nimic pierdut din punctul de vedere al performantelor de urmarire prin utilizarea corectiei purtatoarei pentru un receptor GPS chiar daca bucla purtatoarei este cea mai slaba legatura.
Corectia externa
Asa cum se arata in figura 3., corectia externa a vitezei, aflata de la unitatea de masura a inertiei (IMU - inertial measurement unit), poate fi furnizata canalului receptorului pentru terminarea operatiei buclei de urmarire a purtatoarei. Comutatorul, aratat in pozitie deschisa, trebuie sa fie inchis atunci cand se aplica corectia externa a vitezei. Rata externa de corectie trebuie convertita ca o corectie a vitezei liniei de vizibilitate directa a satelitului GPS. Efectele bratului parghiei asupra corectiei trebuie calculate tinandu-se cont de centrul fazei antenei GPS, care necesita o cunoastere a altitudinii vehiculului si pozitionarea centrului fazei antenei tinandu-se cont si de centrul navigatiei corectiei externe a vitezei. Pentru inchiderea operatiei buclei purtatoarei, corectia trebuie sa fie foarte precisa si sa fie mica sau sa nu aiba timp de asteptare (latenta) sau bucla de asteptare trebuie sa aiba intarziere pentru a compensa timpul de latenta.
Daca bucla purtatoarei este deschisa se implementata strategia de mentinere a semnalului slab, fiind necesara o corectie externa mai putin precisa a vitezei, dar aceasta nu mai poate fi valabila pentru masuratorile triangulatiei receptorului astfel incat aceasta este o expresie scurta. In cazul mentinerii acestui semnal slab, iesirea filtrului buclei purtatoarei trebuie setata la zero si acolo nu este necesar un proces de corelator prompt (instantaneu) a semnalelor in discriminatorul buclei de faza, dar aceste semnale sunt totusi folosite la calcularea C/No, etc.
3. Buclele de urmarire a purtatoarei
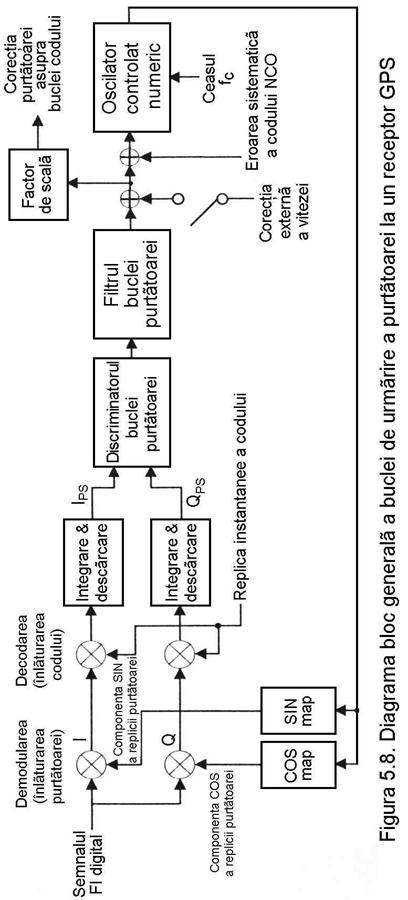
Figura 8. ilustreaza diagrama bloc a unei singure bucle de urmarire a purtatoarei a receptorului GPS. Proiectarile programate ale integratorilor predetectiei purtatoarei, ale discriminatorilor buclei purtatoarei si ale filtrelor buclei purtatoarei caracterizeaza bucla receptorului de urmarire a purtatoarei. Aceste trei functii determina doua caracteristici foarte importante ale performantei in vederea proiectarii buclei receptorului de urmarire a purtatoarei: eroarea zgomotului termic si maximul pragului de solicitare a dinamicii liniei de vizibilitate directa. Intrucat bucla de urmarire a purtatoarei este intotdeauna o legatura slaba intr-un receptor autonom GPS, pragul lui caracterizeaza performanta receptorului GPS in lipsa corectiilor.
Discriminatorul buclei purtatoarei defineste tipul buclei purtatoarei ca PLL, Costas PLL (care este un discriminator de tip PLL care tolereaza modulatia de date in banda de baza a semnalului), sau o bucla inchisa de frecventa (FLL - frequency lock loop). PLL si buclele Costas sunt mult mai precise dar sunt si mult mai sensibile la solicitare dinamica decat FLL. Discriminatorii PLL si buclele Costas produc erori ale fazei la iesirile lor. Discriminatorul FLL produce o eroare a frecventei. Din aceasta cauza, atunci este o alta diferenta in arhitectura filtrului buclei. Atunci se face o integrare aditionala in filtrul FLL fata de filtrul PLL pentru acelasi ordin al filtrului buclei.
Atunci se produce un paradox pe care proiectantul receptorului GPS trebuie sa-l rezolve la proiectarea predictiei integrate, discriminatorului si a functiilor filtrului buclei ale buclelor de urmarire a purtatoarei. Pentru a tolera solicitarea dinamica, timpul predetectiei integrate trebuie sa fie scurt, discriminatorul trebuie sa fie un FLL, iar banda de trecere a filtrului buclei de urmarire trebuie sa fie larga. Totusi, pentru ca masuratorile asupra deviatiei Doppler asupra purtatoarei sa fie cat mai
exacta (sa aiba zgomot redus), timpul predetectiei integrate trebuie sa fie mare, discriminatorul trebuie sa fie un PLL, iar zgomotul in banda de trecere a filtrului buclei de urmarire a purtatoarei trebui sa fie limitat. In practica, un compromis trebuie sa duca la rezolvarea paradoxului. O buna proiectare a receptorului GPS va duce la inchiderea buclelor de urmarire a purtatoarelor cu timpi scurti ai predetectiei integrate, utilizand un FLL si o banda larga a filtrului buclei purtatoarei. Atunci acesta va fi sistematic transformat intr-un Costas PLL cu banda de trecere a predetectiei si cu banda de trecere a buclei de urmarire a purtatoarei setate ca inguste care permit anticiparea dinamicilor. Aceasta va fi o alta prevedere pentru inversarea operatiei FLL in timpul perioadelor de mare solicitare dinamica.
Bucla inchisa de faza - PLL
Daca nu exista date modulate cu 50-Hz in semnalul GPS, atunci se poate folosi un discriminator pur PLL ca discriminator al buclei de urmarire a purtatoarei. De exemplu, un receptor pentru codul P(Y) poate fi implementat cu un discriminator pur PLL pentru utilizarea in cazul urmaririi purtatoarei in banda L2 daca segmentul de control nu indica modulatia datelor. Desi acest caz este specificat ca o posibilitate, el este neplacut a fi activat. Acest mod este specificat in ICD-GPS-200 deoarece operatia PLL pura permite timpului de predetectie integrata sa creasca dincolo de limita de 20-msec impuse de catre cei 50-hz ai datelor de navigatie. Aceasta reduce pierderile, prin urmare imbunatatind pragul de urmarire a semnalului peste 6 dB.
Aceasta este alta posibilitate de a implementa termenul scurt al modului pur PLL printr-un proces ce se cheama desfacere a datelor. Receptorul GPS achizitioneaza tipic o copie completa a intregului mesaj de navigatie dupa 25 de iteratii ale celor cinci subcadre (12,5 min). Receptorul poate atunci calcula secventa mesajului de navigatie pana cand segmentul de control GPS descarca un mesaj nou sau pana cand satelitul schimba mesajul. Pana cand mesajul se schimba semnificativ, receptorul GPS poate executa interpretarea datei fiecarui bit al mesajului de navigatie de 50-Hz sosit utilizand un discriminator pur PLL. Functia de
Tabelul 2.
Cei mai cunoscuti discriminatori PLL
Algoritmul Eroarea fazei
discriminatorului la iesire Caracteristici
Sign (IPS) QPS sin F Aproape optimal pentru RSZg mare. Panta
este proportionala cu amplitudinea A a
semnalului. Incarcarea calculului este
minima.
IPS QPS sin 2F Aproape optimal pentru RSZg mic. Panta
este proportionala cu amplitudinea
semnalului ridicata la patrat, A2. Incarcarea
calculului este moderata.
IPS / QPS tan F Nu este optima, dar este buna pentru RSZg
mare si mic. Panta nu depinde de
amplitudinea semnalului. Incarcarea
calculului este mare si trebuie gasita
eroarea de impartire la zero in jurul valorii
de 90O.
ATAN (IPS/QPS) F Patru cadrane ale arctangentei. Optimal
(maximul estimatorului probabilistic) pentru
RSZg mare si mic. Panta nu este
dependenta de amplitudinea semnalului.
Incarcarea calculului este mare.
procesare a receptorului in banda de baza poate inversa semnul integrarii componentelor in faza (IES, IPS, ILS) si componentelor in cuadratura (QES, QPS, QLS) ale semnalului in concordanta cu un algoritm potrivit. De exemplu, daca IPS are un timp de predetectie integrata de 5 msec, atunci acolo sunt patru esantioane (mostre) ale lui IPS intre fiecare tranzitie a bitului datei care vor avea acelasi semn. Acest semn poate fi semnul bitului datei cunoscut apriori de catre receptor pentru acest interval al datei. Fiecare esantion de 5 msec poate fluctua in semn datorita zgomotului. Daca bitul datei este cunoscut pentru acest interval ca fiind "0", atunci procesul de desfacere a datei nu face nimic celor patru esantioane. Daca bitul datei este cunoscut pentru acest interval ca fiind "1", atunci semnul este inversat pentru toate cele patru esantioane.
Tabelul 2. prezinta mai multi discriminatori PLL ai receptorului GPS, erorile fazelor la iesirile lor si caracteristicile lor.
Buclele Costas
In mod normal, doar buclele de urmarire ale purtatoarei Costas sunt utilizate in receptoarele GPS deoarece semnalul datelor mesajului de navigatie modulat cu 50-Hz ramane si dupa ce a avut loc demodularea si decodarea semnalului venit de la satelit. Buclele Costas sunt insensibile la inversarea fazelor cu 180O in semnalele I si Q daca timpul predetectiei integrate a semnalelor I si Q nu se suprapune peste tranzitia bitilor datei. Trasaturile distinctive ale buclei Costas sunt discriminatorul Costas si capacitatea de ajustare a fazei respectand faza ceasului natural al receptorului in zona predetectiei integrate a receptorului. Caracteristicile ajustarii fazei ale functiilor de integrare si descarcare sunt necesare pentru a evita integrarea peste intervalul tranzitiei datelor (pentru a observa aceasta caracteristica trebuie sa revedem fig.4.).
Tabelul 3. prezinta mai multi discriminatori de tipul Costas PLL ai receptorului GPS, erorile fazelor la iesirile lor si caracteristicile lor. Primi trei discriminatori sunt identici cu cei utilizati intr-un PLL pur. Functia ATAN cu patru cadrane a discriminatorului PLL ramane liniara in intreg domeniul al erorii de intrare de (180O), pe cand, functia ATAN cu doua cadrane a discriminatorului Costas PLL ramane liniara doar in jumatatea domeniului erorii de intrare de (90O).
Tabelul 3.
Cei mai cunoscuti discriminatori Costas PLL
Algoritmul Eroarea fazei
discriminatorului la iesire Caracteristici
Sign (IPS) QPS sin F Aproape optimal pentru RSZg mare. Panta
este proportionala cu amplitudinea A a
semnalului. Incarcarea calculului este
minima.
IPS QPS sin 2F Aproape optimal pentru RSZg mic. Panta
este proportionala cu amplitudinea
semnalului ridicata la patrat, A2. Incarcarea
calculului este moderata.
IPS / QPS tan F Nu este optima, dar este buna pentru RSZg
mare si mic. Panta nu depinde de
amplitudinea semnalului. Incarcarea
calculului este mare si trebuie gasita
eroarea de impartire la zero in jurul valorii
de 90O.
ATAN (IPS/QPS) F Doua cadrane ale arctangentei. Optimal
(maximul estimatorului probabilistic) pentru
RSZg mare si mic. Panta nu este
dependenta de amplitudinea semnalului.
Incarcarea calculului este mare.
de (180O), pe cand, functia ATAN cu doua cadrane a discriminatorului Costas PLL ramane liniara doar in jumatatea domeniului erorii de intrare de (90O).
Figura 9. compara erorile fazelor la iesirile fiecaruia din acesti discriminatori Costas PLL presupunand ca nu exista zgomot in semnalele I si Q. In prezenta zgomotului, amplitudinile iesirilor discriminatorilor sunt reduse (pantele lor tind a se turti) si de asemenea ele tind sa se rotunjeasca in regiunea erorii fazei de 900.
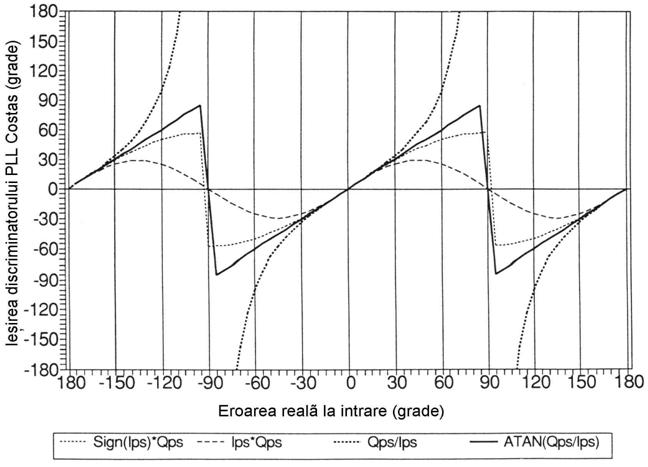
Figura 9. Comparatia discriminatorilor Costas PLL
Referindu-ne la procesul demodularii prezentat in diagrama bloc din figura 8., si presupunand ca bucla de urmarire a purtatoarei este in faza blocata, atunci replica functiei sinus este in faza cu semnalul purtator sosit de la satelit (convertit la frecventa intermediara). Aceste rezultate in produs (cu sinus) al iesirea I, care, cand
sunt mediate, produc maximul amplitudinii lui IPS. Replica functiei cosinus este defazata la iesire cu 90O fata de semnalul purtator sosit de la satelit. Aceste rezultate in produs (cu cosinus) la iesirea Q, care, cand sunt mediate, produc minimul amplitudinii lui QPS. Din acest motiv IPS trebuie sa fie aproape de maximul sau (si sa fie rotit cu 180O de fiecare data cand bitul datei isi schimba semnul) si QPS trebuie sa fie aproape de minimul sau ( si sa fie de asemenea rotit cu 180O de fiecare data cand bitul datei isi schimba semnul). Aceste caracteristici ale PLL sunt ilustrate in figura 10. unde fazorul A (vectorul suma intre IPS si QPS) tind sa ramana aliniate cu axa I si sa comute cu 180O pe durata fiecarei inversari a bitului datei.
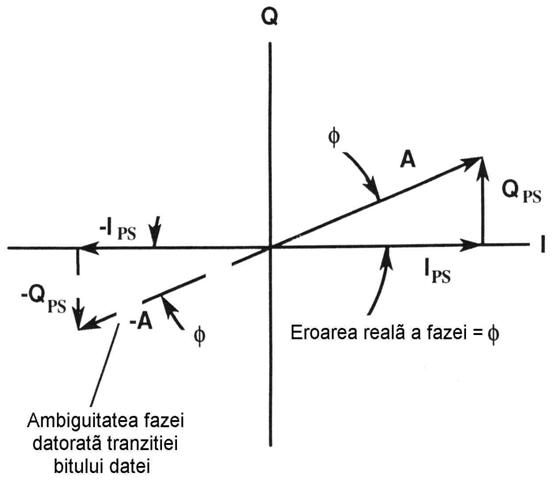
Figura 10. Diagrama fazoriala I,Q descriind eroarea reala de faza
intre faza replicii si faza purtatoarei sosite de la satelit
Buclele Costas PLL precum si buclele conventionale PLL sunt sensibile la solicitare dinamica, dar produc si masuratori ale vitezei de o mare acuratete. Pentru a gasi nivelul puterii semnalului, buclele Costas PLL, de asemenea, furnizeaza fara eroare date demodulate in comparatie cu schemele ce utilizeaza FLL-uri. Prin urmare, acestea sunt dorite in modul de urmarire stationara al buclei receptorului GPS de urmarire a purtatoarei. Totusi, pentru o buna proiectare bucla receptorului GPS de urmarire a purtatoarei trebuie inchisa cu un FLL foarte puternic care sa opereze in toata banda.
Bucla inchisa de frecventa - FLL
PLL-urile produc replica exacta a frecventei sosite de la satelit (convertita la frecventa intermediara) pentru realizarea functiei de demodulare. FLL-urile realizeaza procesul de demodulare prin replicarea aproximativa a frecventei. Din acest motiv, ele sunt de asemenea denumite bucle de control automat al frecventei (AFC - automatic frequency control loops). FLL-urile din receptoarele GPS trebuie sa nu fie sensibile la inversari cu 180O ale semnalelor I si Q. De aceea, timpii de esantionare ai semnalelor I si Q nu trebuie sa se suprapuna peste tranzitiile bitilor datei. In timpul achizitiei initiale a semnalului, cand receptorul nu cunoaste unde sunt limitele tranzitiei datei, este mai usor de folosit mentinerea blocarii frecventei decat blocarea fazei cu semnalul satelitar pana cand se realizeaza sincronizarea de bit. Din aceasta cauza discriminatorii FLL sunt mai putin sensibili in situatiile unde semnalele oarecare I si Q se suprapun peste tranzitia bitilor datei, in special cand timpii predetectiei integrate sunt mici comparativ cu intervalele de tranzitie a bitilor de date. Tabelul 4. prezinta mai multi discriminatori FLL ai receptorului GPS, erorile fazelor la iesirile lor si caracteristicile lor.
Figura 11. compara erorile de frecventa la iesirile acestor discriminatori presupunand ca esantioanele IPS si QPS nu sunt afectate de zgomot. Figura 11.(a) prezinta raspunsul in domeniul frecventei cu o banda a predetectiei de 200-Hz respectiv, 100-Hz in figura 11.(b). Perechile adiacente de esantioane sunt preluate la fiecare (t2 - t1) de 5 msec, respectiv 10 msec.Se observa in ambele figuri
Tabelul 4.
Cei mai cunoscuti discriminatori FLL
Algoritmul Eroarea fazei
discriminatorului la iesire Caracteristici
![]()
![]() Aproape optimal
pentru RSZg mare. Panta
Aproape optimal
pentru RSZg mare. Panta
unde este proportionala cu amplitudinea A a
dot = IPS1IPS2 + QPS1QPS2 semnalului. Incarcarea calculului este
cross = IPS1QPS2 - IPS2QPS1 moderata.
![]()
![]() Aproape optimal
pentru RSZg mic. Panta
Aproape optimal
pentru RSZg mic. Panta
este proportionala cu amplitudinea
semnalului ridicata la patrat, A2. Incarcarea
calculului este cea mai mica.
![]()
![]() Patru cadrane
ale arctangentei. Optimal
Patru cadrane
ale arctangentei. Optimal
(maximul estimatorului probabilistic) pentru
RSZg mare si mic. Panta nu este
dependenta de amplitudinea semnalului.
Incarcarea calculului este mare.
Observatie: Pentru integrare si descarcare, esantioanele prompte (instantanee) IPS1 si QPS1 sunt esantionate la momentul t1, chiar inaintea esantioanelor IPS2 si QPS2 luate la momentul t2. Aceste doua esantioane ar trebui sa faca parte din intervalul acelorasi biti de date. Urmatoarea pereche de esantioane urmeaza a fi luata incepand cu (t2 - t1) sec dupa t2, etc.
ca raspunsul in domeniul frecventei intr-o singura parte al discriminatorilor FLL cross si ATAN2 (cross, dot) este egal cu jumatate din banda de lucru a predetectiei. Raspunsul in domeniul frecventei al discriminatorului FLL sign(dot)cross este doar o patrime din banda de lucru a predetectiei.
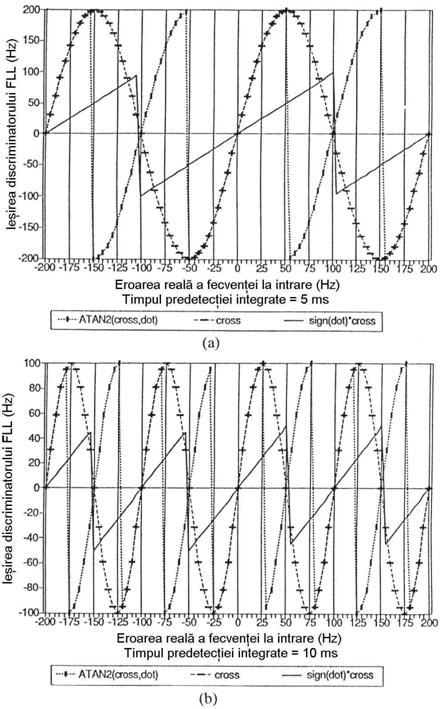
Figura 11. Comparatia discriminatorilor FLL: (a) pentru un timp al predetectiei integrate = 5 msec, (b) pentru un timp al predetectiei integrate = 10 msec
Diagrama fazoriala din figura 12. descrie schimbarea in faza, f f , intre doua esantioane adiacente ale lui IPS si QPS, pentru timpii t1 si t2. Sfarsitul acestei schimbari a fazei fixeaza un interval de timp care este proportional cu eroarea frecventei din bucla de urmarire a purtatoarei. Figura ilustreaza de asemenea ca nu exista ambiguitate in frecventa in discriminatorul FLL al receptorului GPS din cauza tranzitiilor datelor, esantioanele I si Q adiacente furnizate sunt luate din intervalul acelorasi biti de date. Se observa ca fazorul A, care este suma vectorilor IPS si QPS, ramane constant si se roteste cu o rata direct proportionala cu eroarea frecventei cand bucla este in frecventa blocata. Aceasta face posibila demodularea lantului de biti ai datei satelitului in FLL. Detectia tranzitiei datei este mai complicata in FLL iar rata erorii bitilor este mai mare ca la PLL.
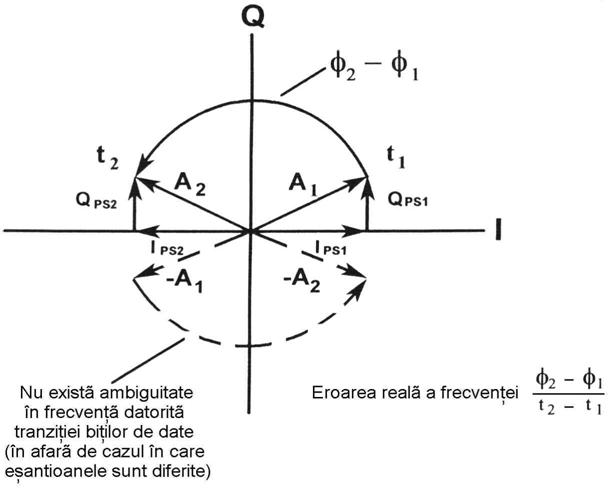
Figura 12. Diagrama fazoriala I,Q descriind eroarea reala de faza
intre faza replicii si faza purtatoarei sosite de la satelit
3.4. Buclele de urmarire in cod
Figura 13. prezinta diagrama bloc a unei singure bucle de urmarire a codului a unui receptor GPS. Proiectarea integratorilor programabili ai predetectiei, a discriminatorului buclei de cod si a filtrului buclei codului caracterizeaza bucla receptorului de urmarire in cod. Aceste trei functii determina doua caracteristici mai importante ale proiectarii buclei codului receptorului: eroarea datorata efectului zgomotului termic asupra buclei codului si a solicitarii maxime dinamice a liniei de vizibilitate directa.
Tabelul prezinta trei discriminatoare necoerente cu bucla de blocare a intarzierii ale receptoarelor GPS si caracteristicile lor (DLL - delay lock loop). Al patrulea discriminator DLL aratat este versiunea normata a celui de-al treilea discriminator. Normarea modifica marimea sensibilitatii a acestui discriminator DLL, care imbunatateste performanta sub interferenta RF de tipul puls.
Tabelul 4.
Cei mai cunoscuti discriminatori FLL
Algoritmul discriminatorului Caracteristici
![]() Doar
acest discriminator DLL foloseste
Doar
acest discriminator DLL foloseste
(dot) toate cele trei corelatoare si rezulta o
incarcare a calcului in banda de baza mica.
![]() Incarcarea calcului este moderata.(power)
Incarcarea calcului este moderata.(power)
![]() Incarcarea calcului este mare.(anvelope)
Incarcarea calcului este mare.(anvelope)
 Incarcarea calcului este foarte mare.
Incarcarea calcului este foarte mare.
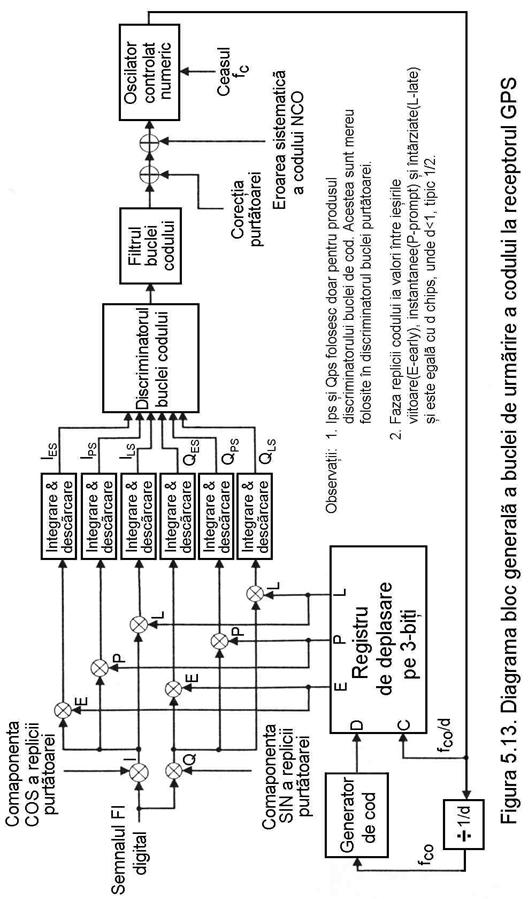
Figura 14. compara iesirile a patru discriminatori DLL. Se presupune ca punctele corelatiilor viitoare(early), momentana(prompt) si intarziata(late) sunt separate intre ele de chip. Acest procedeu prin care registrul de deplasare pe trei biti este "deplasat" cu dublul ratei ceasului codului generator. De asemenea, se presupune ca cele trei corelatoare sunt ideale si ca semnalele I si Q nu sunt afectate de zgomot. In realitate, corelatia in triunghi tinde sa rotunjeasca foarte putin varful si nu prezinta o panta liniara de o parte si de alta a varfului benzi finite frontale. Drept rezultat, prezenta zgomotului tinde sa aplatizeze pantele si sa rotunjeasca marginile discriminatorilor.
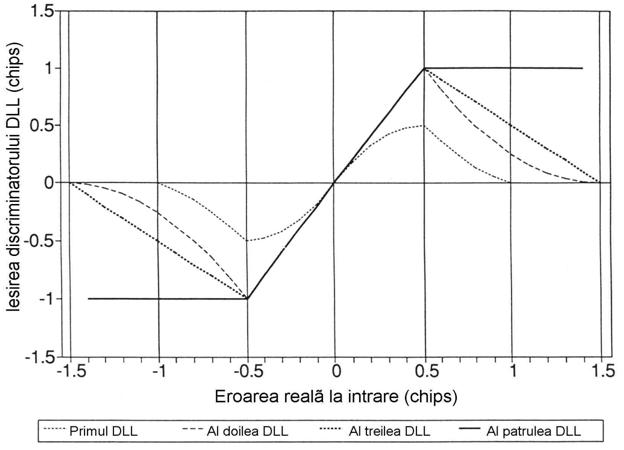
Figura 14. Comparatia discriminatorilor DLL
Figura 1 ilustreaza anvelopele care rezulta pentru cele trei faze diferite ale codului replica corelate simultan cu acelasi semnal venit de la satelit. Pentru a usura vizualizarea, faza de intrare a componentei semnalului sosit de la satelit este aratata fara zgomot. Cele trei faze ale replicii sunt decalate intre ele cu chip si sunt reprezentative codurile replicii viitoare(early), momentana(prompt) si intarziata(late) care sunt sintetizate in bucla codului din figura 13..
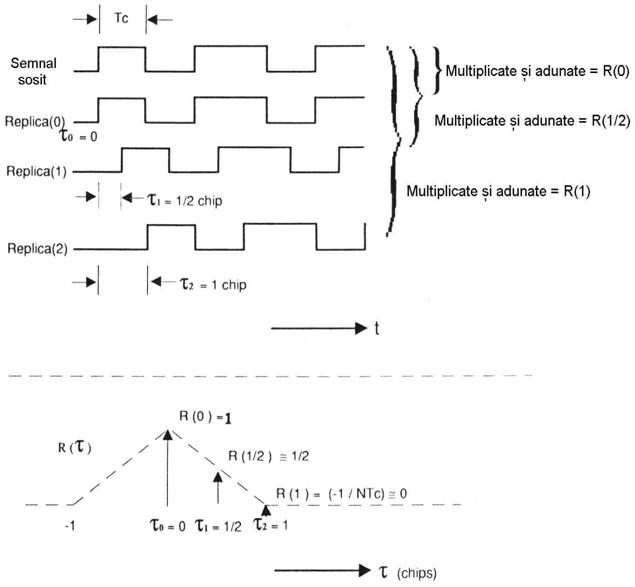
Figura 1 Procesul de corelatie a codului pentru trei faze diferite
ale codului replica
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2268
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved