| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
PERFORMANTELE AUTOVEHICULULUI MERCEDES 509 CDI
Performantele reprezinta posibilitatile maxime ale autovehiculului in privinta vitezei, demarajului si capacitatii de franare, precum si indicii de apreciere ai acestora. Studiul performantelor autovehiculului se face cu ajutorul bilantului de tractiune, bilantului de putere si ecuatiei generale de miscare, pe baza se obtin parametri si indicii caracteristici deplasarii cu regim tranzitoriu de accelerare sau de franare.
1. Determinarea bilantului de tractiune
Bilantul de tractiune al autovehiculului reprezinta echilibrul tuturor fortelor care actioneaza asupra acestuia la miscarea rectilinie, pe un drum oarecare, avand admisiunea plina a motorului, respectiv forta totala la roata obtinuta prin insumarea fortelor tangentiale de la rotile motoare echilibreaza suma tuturor rezistentelor la inaintare:
![]() (1)
(1)
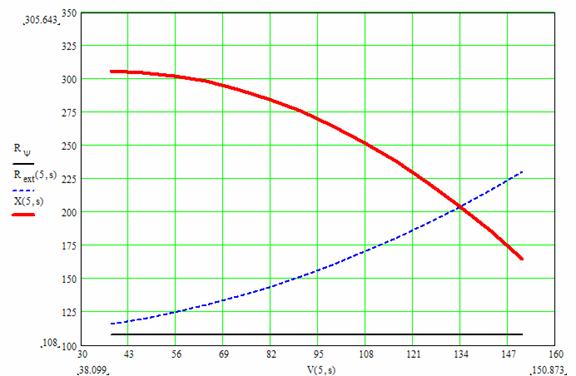
Fig. 1. Bilantul de tractiune al autovehiculului
In
figura 1 sunt trasate curbele fortei la roata si ale rezistentelor la
inaintare, in functie de viteza autovehiculului. Coeficientul de rezistenta la
rulare s-a considerat constant si de aceea rezistenta la rulare este
reprezentata printr-o dreapta orizontala. Intersectia sumei rezistentelor
exterioare ![]() cu forta la roata X arata viteza maxima cu care se poate deplasa autovehiculul in
conditiile considerate.
cu forta la roata X arata viteza maxima cu care se poate deplasa autovehiculul in
conditiile considerate.
2. Determinarea bilantului de putere
Bilantul de putere al autovehiculului reprezinta echilibrul dintre puterea la roata si suma puterilor necesare invingerii rezistentelor la inaintare:
![]() (2)
(2)
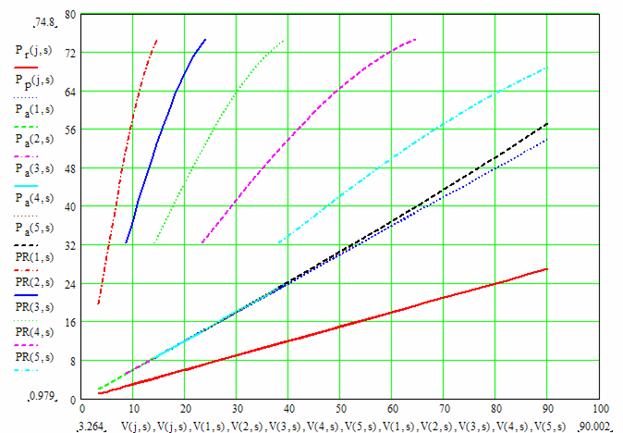
Fig. 2. Bilantul de putere al autovehiculului
Bilantul
de putere ca si bilantul de tractiune se foloseste la studiul performantelor
autovehiculului. De pe graficul bilantului de putere (Fig. 2) se pot observa
treapta de viteza si viteza cu care se poate deplasa autovehiculul in diferite
conditii de drum si exploatare (la intersectia curbei sumei puterilor necesare
invingerii rezistentelor la inaintare ![]() cu curbele puterilor la roata
cu curbele puterilor la roata ![]() ). In cazul
de fata coeficientul de rezistenta la rulare s-a considerat constant, iar
inclinarea drumului s-a considerat egala cu zero si de aceea pe grafic nu apare
rezistenta pantei. Segmentele ordonatei, care se afla intre curbele
). In cazul
de fata coeficientul de rezistenta la rulare s-a considerat constant, iar
inclinarea drumului s-a considerat egala cu zero si de aceea pe grafic nu apare
rezistenta pantei. Segmentele ordonatei, care se afla intre curbele ![]() si
si ![]() , determina
puterea excedentara sau disponibila a autovehiculului pentru a-i accelera
miscarea.
, determina
puterea excedentara sau disponibila a autovehiculului pentru a-i accelera
miscarea.
3. Determinarea caracteristicii fortei la roata
Caracteristica fortei la roata sau caracteristica de tractiune reprezinta curbele de variatie ale acesteia in functie de viteza de deplasare a autovehiculului pentru fiecare treapta a cutiei de viteze.
Pentru
studiul performantelor autovehiculului pe un drum oarecare, caracterizat de un
unghi de inclinare longitudinala ![]() si un coeficient de rezistenta la rulare f, caracteristica fortei la roata se
completeaza si cu curbele bilantului de tractiune.
si un coeficient de rezistenta la rulare f, caracteristica fortei la roata se
completeaza si cu curbele bilantului de tractiune.
Construirea caracteristicii fortei la roata se face pe baza caracteristicii exterioare a motorului, pornind de la curba puterii la roata sau de la curba momentului la roata, utilizand relatiile:
![]()
![]() . (3)
. (3)
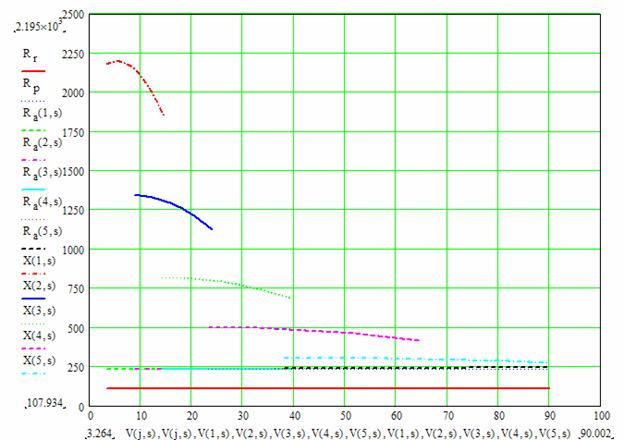
Fig. 3. Caracteristica fortei la roata
Pentru trasarea graficului din figura 3 s-a considerat ca inclinarea longitudinala a drumului este nula, iar coeficientul de rezistenta la rulare este constant.
Din
graficul caracteristicii fortei la roata se pot afla treapta de viteza si
viteza cu care se poate deplasa autovehiculul in diferite conditii de drum si
exploatare (la intersectia curbei sumei rezistentelor exterioare ![]() cu forta la roata X).
cu forta la roata X).
Caracteristica fortei la roata se stabileste atat pentru studiul performantelor cat si pentru studiul posibilitatilor si momentelor de trecare de la o treapta de viteza la alta, in timpul mersului.
5. Determinarea acceleratiei, timpului si a spatiului de demarare
5.1. Determinarea acceleratiei
Acceleratia autovehiculului caracterizeaza, in general, calitatile lui dinamice deoarece, in conditii egale, cu cat acceleratia este mai mare cu atat creste viteza medie de exploatare. Valoarea acceleratiei autovehiculului se poate determina cu ajutorul caracteristicii dinamice, utilizand relatia:
![]()
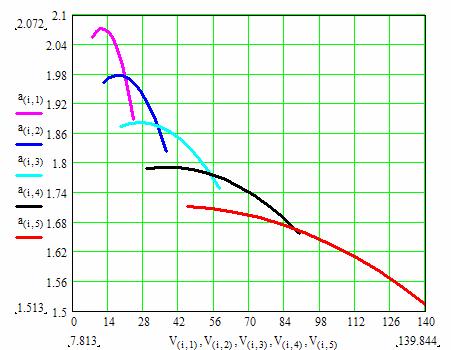
Fig. 4. Acceleratia autovehiculului
Rezulta
ca acceleratia autovehiculului este invers proportionala cu coeficientul
maselor in miscare de rotatie ![]() si direct proportionala cu diferenta
si direct proportionala cu diferenta ![]() , adica
este cu atat mai mare cu cat factorul dinamic este mai mare.
, adica
este cu atat mai mare cu cat factorul dinamic este mai mare.
Rezultatele obtinute se incadreaza in valorile medii date in literatura de specialitate.
La determinarea acceleratiei dupa metoda expusa mai sus trebuie avut in vedere faptul ca apare o anumita inexactitate. Aceasta se datoreaza faptului ca factorul dinamic se calculeaza pe baza datelor obtinute la incercarea autovehiculului atunci cand se deplaseaza cu viteza uniforma si nu in regim tranzitoriu.
Aceste determinari ale acceleratiei pot diferi de cele reale cu aproximativ 7-8%.
5.2. Determinarea timpului de demarare
Capacitatea de demarare a autovehiculelor este caracterizata de acceleratie, insa pentru a avea indici de apreciere mai usor de utilizat in compararea diferitelor tipuri de autovehicule, este necesara determinarea timpului si spatiului de demarare.
Prin
timp de demarare ![]() se intelege timpul in care autovehiculul,
plecand din loc, atinge viteza maxima, sau mai precis 0,9 din valoarea
acesteia.
se intelege timpul in care autovehiculul,
plecand din loc, atinge viteza maxima, sau mai precis 0,9 din valoarea
acesteia.
Pentru
determinarea duratei de demarare se construieste diagrama inversului
acceleratiei pentru toate treptele cutiei de viteze, considerandu-se ca
trecerea de la o treapta la alta se face in momente optime, adica la turatia de
consum minim ![]() .
.
Din
expresia acceleratiei ![]() , se poate
scrie:
, se poate
scrie:
![]() (6)
(6)
de unde se poate observa ca timpul de demarare se poate obtine prin integrarea grafica a acestei relatii:
 (7)
(7)
unde ![]() si
si ![]() .
.
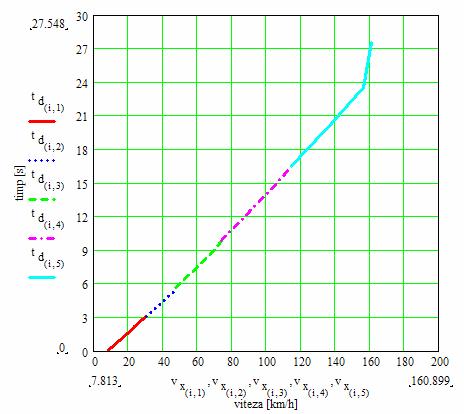
Fig. 5. Curba variatiei timpului de demarare a autovehiculului,
in functie de viteza acestuia.
La un autovehicul care are k trepte in cutia de viteze, durata totala de demarare se determina conform relatiei:
![]() (8)
(8)
in care ![]() este durata de demarare corespunzatoare
treptei j de viteza.
este durata de demarare corespunzatoare
treptei j de viteza.
5.3. Determinarea spatiului de demarare
Spatiul
parcurs de autovehicul in timpul de demarare se numeste spatiu de demarare ![]() .
.
Pentru determinarea spatiului de demarare se pleaca de la relatia generala a vitezei autovehiculului, din care se poate scrie:
![]() (9)
(9)
de unde lungimea spatiului de demarare este:
 (10)
(10)
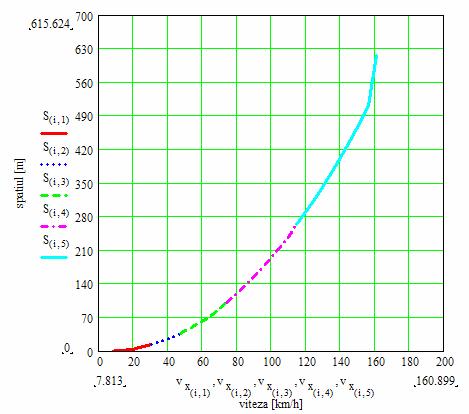
Fig. 6. Spatiul total de demarare a autovehiculului,
in functie de viteza acestuia.
La un autovehicul care are k trepte in cutia de viteze, spatiul total de demarare se determina conform relatiei:
![]() (11)
(11)
in care ![]() este spatiul de demarare corespunzator treptei
j de viteza.
este spatiul de demarare corespunzator treptei
j de viteza.
6.Determinarea parametrilor capacitatii de franare
Aprecierea si compararea capacitatilor de franare a autovehiculelor se face cu ajutorul deceleratiei maxime absolute af sau relative afrel , a duratei franarii tf si a spatiului de frinare minim Sfmin in functie de viteza. Acesti parametrii se determina intre doua viteze din care una poate sa fie 0.
6.1.Deteminarea deceleratiei.
Daca decelerarea se efectueaza cu motorul decuplat ecuatia diferentiala la decelerare prin analogie cu ecuatia difereniala la demaraj devine:
![]() (12)
(12)
In relatia 12:
af deceleratia absoluta
![]() coeficientul maselor de rotatie
coeficientul maselor de rotatie
ma masa autovehiculului
Ff fotta de franare (Ff φZf)
ΣRext- suma rezistentelor exerioare
In cazul franarii cu motorul cuplat relatia 12devine:
![]() (13)
(13)
unde ![]() reprezinta forta de franare
datorata motorului.
reprezinta forta de franare
datorata motorului.
Pentru aprecierea cantitativa a franarii de multe ori se utilizeaza deceleratia relativa (coeficientul de franare):
![]() (14)
(14)
unde g reprezinta acceleratia gravitationala.
Considerand coeficientul maselor in rotatie este 1 si rezistentele drumului 0 franarea efectuanduse pe drum drept, Zf=Ga (franarea are loc pe toate rotile)
![]() (15)
(15)
iar daca toate rotile sunt blocate:
![]() (16)
(16)
6.2.Determinarea duratei de franare
Durata de franare se calculeayainte v1 si v2 rezultand durata minima de franare:
![]() (17)
(17)
Daca franarea este totala atunci v2=0:
![]() (18)
(18)
Procesul de franare este complexconstituit din mai multe faze influentand in mod irect eficienta franarii formula timpului real de oprire fiind:
![]() (19)
(19)
topr-timpul total de oprire
tifiz-tipul datorita intarzierii fiziologice (valoarea medie este de 0.6 secunde dar acesta depinde de fiecare conducator auto)
timec-tipul datorat intarzirii mecanice (valori intre 0.1 0.2 secunde)
tif- timpul scurs de la inceperea procesului de franare pana la blocarea rotilor (valori intre 0.1 0.2 secunde)
6.3.Determinarea spatiului de franare
Deceleratia autovehiculului poate fi scrisa astfel:
![]()
![]() (20)
(20)
Considerand coeficientul maselor in rotatie este 1 si rezistentele drumului 0 franarea efectuanduse pe drum drept, Zf=Ga (franarea are loc pe toate rotile), spatiul minim de franare se poate calcula astfel:
![]() (21)
(21)
In cazul in care franarea are loc pana la oprire v2=0, coeficientul de rezistenta la rulare se poate considera f=0 atunci:
![]() (22)
(22)
Spatiul total de oprire este dat de relatia:
![]() (23)
(23)
In figurile urmatoare se va determina pentru patru categorii de drum deceleratia (fig 7), timpul (fig8, fig9) si spatiul de decelerare (fig 10) in functie de coeficentii de aderenta a drumului.
Sosea de asfalt in stare buna: φ
Sosea pietruita in stare buna: φ
Drumde pamant uddupa ploaie:
Dum de zapada batatorita
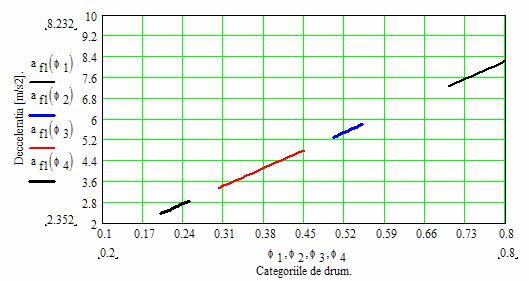
Fig. 7. Deceleratia autovehiculului in functie de categoriile de drum
Se observa ca acceleratia creste odata cu valoarea coeficientului de aderenta si variaza in functie de categoria de drum pe care se deplaseaza autovehiculul.
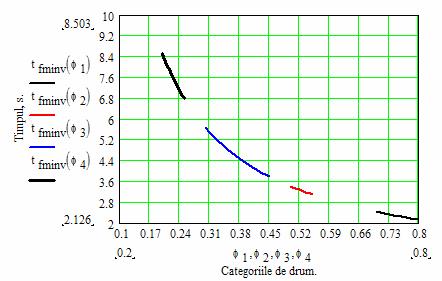
Fig. Timpul minim de oprire a autovehiculului infunctie de categoria
de drum de la o viteza de 60 km h
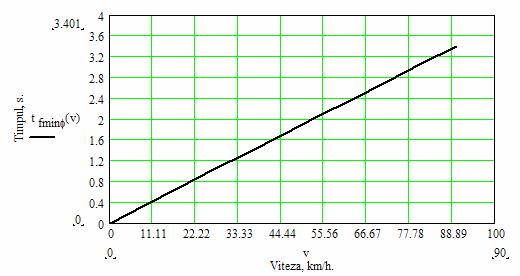
Fig. 9. Timpul minim de oprire a autovehiculului de la
viteze diferite pentru drum de asfalt in stare buna
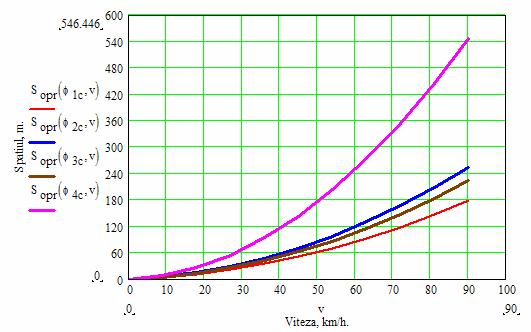
Fig. 10. Spatiul minim de oprire in functie de la diferite
viteze pentru cele patru categorii de drum
Se observa din graficul din figura 10 ca spatiul in care acesta se poate opri difera mult de categoria de drum pe care autovehiculul se deplaseaza.
Valorile obtinute in graficele din cele patru figuri nu sunt cele reale; ele reprezinta valori minime pentru care autovehiculul s-ar comporta in conditii ideale. In conditii reale intervin urmatorii factori:
Ø Neuniformitatea coeficientilor de aderenta pe caile de rulare a autovehiculului;
Ø Timpii de intarziere datorate frecarilor si jocurilor din mecanismul de franare;
Ø Timpii de intarziere datorati conducatorului auto care difera pentru fiecare conducator auto.
Acesti factori imluenteza in mod negativ parametri capacitatii de franare; marind valorile timpilor de oprire, cresctnd valorile spatiului de oprire, si scazand valorile deceleratiei.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2414
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved