| CATEGORII DOCUMENTE |
| Agricultura | Asigurari | Comert | Confectii | Contabilitate | Contracte | Economie |
| Transporturi | Turism | Zootehnie |
| Navigatie |
DETERMINAREA PUNCTULUI NAVEI CU RELEVMENTE
1. Reguli pentru alegerea reperelor de navigatie
2. Reguli pentru masurarea relevmentelor
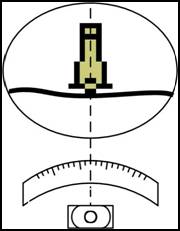
[Figura 75] Masurarea relevmentului
I. pe timpul zilei: se va releva mai intai reperul apropiat de axul longitudinal al navei, terminand cu cel apropiat de travers; justificarea acestei reguli consta in faptul ca relevmentele prova apropiate de 090o variaza mult mai rapid decat cele apropiate de 000o sau 1800.
II. pe timpul noptii: se va releva mai intai farul cu cea mai scurta durata a sclipirii, terminand cu cel care are cea mai lunga durata (perioada).
3. Determinarea punctului navei cu doua relevmente simultane
Determinarea punctului navei cu doua relevmente masurate simultan la doua obiecete constituie procedeul cel mai frecvent folosit in practica navigatiei. Algoritmul pentru determinarea punctului se desfasoara in urmatoarea succesiune:
alegerea din harta a reperelor la care se vor face relevarile
identificarea reperelor de la coasta la care se vor face relevarile. Pentru o precizie mai buna se recomanda sa se evite relevarea reperelor de la coasta care se vad sub unghiuri mai mici de 30s sau mai mari de 150s (dreptele de relevment sa se intersecteze sub un unghi cuprins in intervalul 30s - 150 s);
verificarea reprezentarii pe harta a reperelor;
efectuarea observatiilor la cele doua repere de la coasta. Pentru a se elimina eroarea cauzata nesimultaneitateaobservatiilor la cele doua repere trebuie efectuate intr-un timp foarte scurt, 5 - 8 secunde;
in momentul masurarii celui de-al doilea relevment se noteaza:
o ora cu precizie de 0,5 secunde;
o citirea la loch cu o precizie de 01 Mm;
o drumul giro (sau compas dupa caz) cu o precizie de 05s.
convertirea relevmentelor compas in relevmente adevarate;
trasarea pe harta a dreptelor de relevment corespunzatoare relevmentelor masurate prin cele doua repere. Cel mai probabil, punctul navei se va gasi la intersectia celor doua drepte de relevment;
se determina eroarea grafica E;
se apreciaza gradul de incredere in punct, calculand eroarea medie patratica.
se traseaza noul drum deasupra fundului din punctul observat determinat.
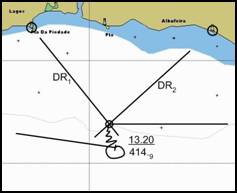
[Figura 76] Determinarea punctului navei cu doua relevmente simultane
Se defineste eroarea grafica si se noteaza cu E, distanta grafica exprimata in Mm dintre punctul estimat si punctul observat; in plus eroarea grafica exprima si orientarea punctului observat fata de punctul estimat.
Pentru figura 76 , E = (2 Mm, 350o).
Pozitia navei determinata cu doua relevmente simultane se reprezinta pe harta cu un cerc cu un punct in mijloc.
3.1 Reducerea observatiilor la acelasi moment. Seria de relevmente
Observarea (masurarea) a doua relevmente, simultan de catre un singur observator, este imposibila in practica. Cu toate acestea, se accepta ca doua masuratori executate de un singur observator sa fie considerate simultane, in anumite limite.
Eroarea datorata nesimultaneitatii observatiilor se considera neglijabila daca spatiul parcurs de nava in intervalul dintre masuratori, nu depaseste lungimea navei. Astfel, pentru viteza navei de 12 Nd, intervalul dintre masuratori trebuie sa fie de cel mult 5-8 secunde, corespunzator unui spatiu parcurs de 50-60 m.
Atunci cand, din diferite motive se depaseste aceasta limita de timp, se va aplica procedeul reducerii observatiilor la acelasi moment.
Procedeul consta in masurarea unei serii de relevmente, astfel (fig.77) :
la ora 02.14 se masoara, la intervale egale de timp (30 sec. sau 1 min.) relevmente la cele doua repere, in urmatoarea succsesiune:
o Rg1 (Rc1)la reperul B;
o Rg2 (Rc2)la reperul A;
o Rg3 (Rc3)la reperul B.
se convertesc relevmentele masurate in relevmente adevarate;
se determina relevmentele care urmeaza a fi trasate pe harta pentru momentul relevarii reperului A
o relevmentul la reperul A: RA= Ra2;
o relevmentul la reperul B: ![]() .
.

[Figura 77] Reducerea observatiilor la acelasi moment
se traseaza dreaptele de relevment corespunzatoare RA si RB.
La intersectia dreptelor de relevment se gaseste punctul observat al navei. Punctul astfel determinat este independent de eroarea de nesimultaneitate a observatiilor.
Nu trebuie uitat ca pozitia punctului observat al navei determinat cu doua relevmente simultane este dependenta de valoarea erorilor accidentale care insotesc procesul de masurare (observare) a relevmentelor. Vorbim deci despre eroarea medie patratica a punctului determinat cu doup relevmente simultane[1].
4. Determinarea punctului navei cu relevmente succesive
4.1 Determinarea punctului navei cu relevmente succesive la doua repere
Cand spatiul parcurs de nava in intervalul de timp dintre doua relevmente masurate la doua repere este mare, astfel ca procedeul reducerii relevementelor la acelasi moment nu mai este aplicabil, pozitia navei se determina considerand observatii succesive.
Presupunem ca nava merge in drumul D (fig 79) si reperele A si B apar succesiv in vedere; pentru determinarea pozitiei se procedeaza astfel:
se releveaza reperul A si simultan se citesc ora bordului si lochul (cl1);
se traseaza relevmentul RA prin reperul A; intersectia acestuia cu drumul navei este punctul Z1;
in momentul cand apare in vedere obiectul B, se ia relevmentul RB la acesta. Simultan se citesc ora bordului si lochul (cl2)
se traseaza relevmentul RB prin reperul B;
[Figura 79] Determinarea punctului navei prin doua relevmente succesice la doua repere
se calculeaza distanta parcursa de nava in intervalul de timp dintre observatii:
m= f(cl2 - cl1)
cu o deschizatura de compas egala cu m si cu originea in Z1, se intersecteaza drumul navei in Z2, care reprezinta punctul estimat al navei in raport cu Z1;
se translateaza relevmentul RA prin Z2 si la intersectia dreptei de relevment transportata RA' cu relevmentul RB se obtine punctul estimat-observat al navei.
Punctul estimat-observat al navei se reprezinta pe harta printr-un cu un triunghi cu punct in mijloc si este cel mai probabil punct al navei.
Denumirea de punct estimat - observat se explica prin faptul ca in determinarea acestuia concura atat observatii costiere cat si elemente de estima.
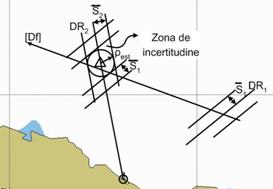
4.2 Determinarea punctului navei cu relevmente succesive la un singur reper
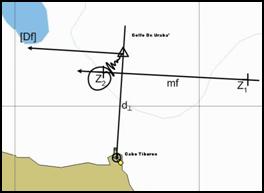
Fie situatia din figura 80. Nava masoara Rg1 la farul F la ora 12.00, iar la ora 12.30 masoara al doilea relevment Rg2 la acelasi far; se pune problema determinarii punctului navei.
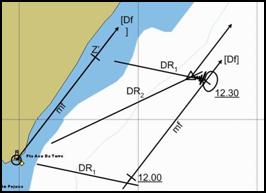
[Figura 80] Determinarea punctului navei prin transportul primei drepte de relevment
Dupa convertirea celor doua relevmente, trasarea pe harta a dreptelor de relevment corespunzatoare si detreminarea punctelor estimate ale navei la orele 12.00 si 12.30, se va trasa drumul real al navei (Df) prin farul F, se va masura pe acest drum spatiul real parcurs de nava intre cele doua masuratori (mf), iar prin punctul fictiv Z' obtinut se va translata dreapta de relevment DR1.
Punctul navei este dat de intersectia dintre DR2 si DR1 transportata prin Z'.
Algoritmul operatiunilor la bord este urmatorul:
se identifica reperul si se verifica daca este trecut cu precizie in harta ;
se masoara Rg1 la F la ora 12.00/100 si se determina punctul estimat al navei (Z1) ;
se masoara Rg2 la F la ora 12.30/1072 si se determina punctul estimat al navei (Z2);
se traseaza prin farul F doar DR2 ;
se traseaza prin farul F drumul
real Df si se masoara
pe acesta spatiul mf =![]() Vf
; se obtine punctul fictiv Z' ;
Vf
; se obtine punctul fictiv Z' ;
se traseaza prin Z' prima dreapta de relevment DR1;
se obtine punctul navei la intersectia DR1 cu DR2 ;
se incadreaza punctul estimat -observat cu un triunghi, se uneste cu o linie serpuita punctul estimat Z2 cu punctul estimat - observat ;
se scot coordonatele punctului estimat-observat, se calculeaza eroarea medie-patratica in punct si se determina din harta eroarea grafica (E).
4.2.1 Determinarea punctului navei cu doua relevmente in cazul schimbarilor de drum intre relevmente
In figura 81 este schitata o astfel de situatie, in care, intre momentul masurarii Rg1 (punctul estimat Z1) si momentul masurarii celui de al doilea relevment Rg2 (punctul estimat Z4), nava executa schimbari de drum.
Problema se rezolva trasand prin reperul F segmentul de drum Df ale navei parcurse intre Z1 si Z4, astfel :
Z1Z2 = FZ2' ; Z2Z3 = Z2'Z3' ; Z3Z4 = Z3'Z4'
Se remarca faptul ca punctul estimat Z1 este punctul navei in momentul masurarii Rg1 (deci corespunde DR1) iar Z4 este punctul estimat al navei in momentul masurarii Rg2 (corespunzator DR2). Se vor trasa DR1 si DR2 astfel :
DR1 prin Z4' ;
DR2 prin F.
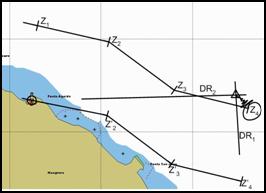
Figura 81] Determinarea punctului navei in cazul schimbarilor de drum intre relevmente.
La intersectia DR1 si DR2 se va gasi punctul estimat - observat al navei. Acesta este cel mai probabil punct al navei.
4.3 Cazuri particulare de determinare a punctului navei cu relevmente succesive
Principii generale
Pentru cazul schitat in fig. 82, este evident mai comod sa se determine punctul navei masurand pe DR2 distanta d . In aceasta situatie, problema se reduce la a calcula pe d, cunoscand Rg1, Rg2 si mf. Dupa cum se observa din figura de mai jos, cand se determina punctul navei cu doua relevmente succesive se formeaza intotdeauna un triunghi NZ1Z2 care are ca laturi distantele de la nava la reper si distanta parcursa de nava, iar ca unghiuri relevmentele prova la reper in momentul observatiilor si unghiul format intre relevmente.
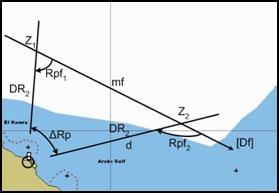
[Figura 82] Calculul distantei pe al II-lea relevment.
Calculul distantei d pe al doilea relevment (fig.82).
dupa masurarea Rg1 si Rg2 se vor calcula relevmentele prova deasupra fundului Rpf1 si Rpf2 corespunzatoare, adica unghiurile masurate de la DR1 (respectiv DR2) la Df. daca nu exista derive, relevmentele prova deasupra fundului se confunda cu relevmentele prova ;
se aplica teorema sinusurilor in triunghiul FZ1Z2:
d/sin Rpf1 = mf/sin![]() Rp
Rp
unde:
![]() Rp = Rpf2 -
Rpf1 ;
Rp = Rpf2 -
Rpf1 ;
Rezulta :
d = mf (sin![]() Rp/sin
Rpf1
Rp/sin
Rpf1
Daca se noteaza:
k= sin![]() Rp/sin
Rpf1
Rp/sin
Rpf1
atunci
d=k![]() mf
mf
In practica, pentru evitarea calculelor, se recomanda utilizarea tablei 9 din DH-90. Se intra cu Rpf1 de sus in jos si cu Rpf2 de la stanga la dreapta. La intersectia liniei si coloanei se vor gasi doi coeficienti:
1) coeficientul k dedus mai sus, utilizat pentru valori oarecare ale Rpf1 si Rpf2;
2) coeficientul k' utilizat pentru cazul particular in care Rpf2 = 900.
Intotdeauna k > k'.
dupa ce s-a scos k din tabla 9, se calculeaza d cu relatia, se traseaza prin farul F a doua dreapta de relevment DR2 iar pe ea se masoara d obtinand punctul estimat-observat (fig.83);
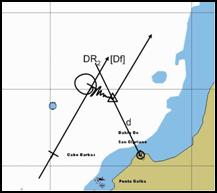
[Figura 83] Aplicarea metodei cu distanta pe al II-lea relevment
se scot coordonatele punctului, se determina eroarea grafica E si se calculeaza eroarea medie patratica in punct.
Metoda cu distanta pe al II-lea relevment se aplica indiferent de valorile Rpf1 si Rpf2. Pentru anumite valori ale acestora, se disting urmatoarele cazuri particulare.
4.3.1 Procedeul relevmentului prova dublu
Este cazul in care Rpf2 = 2Rpf1 . In acest caz, triunghiul FZ1Z2 este isoscel (fig 84), adica:
Z1Z2 = FZ2 <===> mf = d
unde d este distanta pe al doilea relevment.
Ca urmare, determinarea punctului se reduce la a determina cu precizie mf , care se ia apoi in gheara compas si se masoara pe DR2, obtinand astfel punctul estimat-observat.
Algoritmul operetiunilor la bord:
se identifica reperul F;
se verifica daca reperul se gaseste pe harta;
se masoara Rg1 si se determina punctul estimat Z1;
se converteste Rg1 in Rpf1 (din relatia Ra=DfRpf semnul - sau + fiind dat de bordul in care se masoara relevmentul);
se calculeaza Rpf2 = 2Rpf1;
se calculeaza Rg2 din Rpf2;
se fixeaza alidada pe Rg2 si se asteapta pana cand in alidada apare reperul F;
in momentul in care reperul se gaseste pe firul reticular al alidadei, se citeste ora si cl; se determina punctul estimat Z2;
se traseaza DR2 prin farul F;
se scoate din harta mf = Z1Z2 cu gheara si se pune pe DR2 , obtinand punctul estimat-observat :
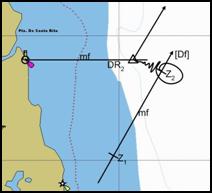
[Figura 84] Cazul relevmentului prova dublu
Concluzie: In cazul relevmentului prova dublu, se asteapta pe al doilea relevment. Se recomanda ca asteptarea sa se faca pe relevment giro (Rg2), nu pe relevment prova(Rp2).
4.3.2 Procedeul distantei la travers
Este cazul in care Rpf2 = 900
(fig.85). In aceasta situatie, ![]() FZ1Z2 este
dreptunghic (fig.85), de unde:
FZ1Z2 este
dreptunghic (fig.85), de unde:
d = mf tg(Rpf1)
Problema determinarii punctului navei
se reduce la a calcula distanta de al doilea relevment cu relatia de
mai sus si in continuare, de a masura d pe DR2 .
Deoarece Rpf2 = 900,
distanta pe al doilea relevment se noteaza cu (d![]() )
si se numeste distanta la travers.
)
si se numeste distanta la travers.
[Figura 85] Cazul distantei la travers
In practica, se vor utiliza anumite valori de Rpf1, astfel incat tg(Rpf1) sa ia valori intregi. Aceste valori sunt:
Rpf1 = 2605
..tgRpf1 = 0.5 d![]() = mf/2
= mf/2
Rpf1 = 450
tgRpf1 = 1 .. d![]() = mf
= mf
Rpf1 = 6305
..tgRpf1 = 2 .. d![]() = 2mf
= 2mf
Rpf1 = 7105tgRpf1
= 3 . d![]() = 3mf
= 3mf
Algoritmul operatiunilor la bord
identifica reperul si verifica existenta acestuia in harta;
alege din lista de mai sus valoarea de Rpf1 cea mai apropiata;
calculeaza Rg1 corespunzator Rpf1 ales;
fixeaza alidada la valoarea Rg1 si asteapta aparitia reperului F pe firul reticular al alidadei;
in momentul aparitiei farului F in alidada se citeste O si cl se determina punctul estimat (Z1);
calculeaza Rg2 corespunzator Rpf2 = 900;
fixeaza alidada la valoarea Rg2 si asteapta aparitia reperului F pe firul reticular al alidadei;
in momentul aparitiei farului F in alidada, citeste O si cl si determina punctul estimat (Z2);
converteste Rg2 in Ra2 (sau mai simplu, duce DR2 perpendicular pe Df);
extrage valoarea d![]() din lista
de mai sus;
din lista
de mai sus;
masoara pe DR2
distanta la travers d![]() si
obtine punctul estimat-observat.
si
obtine punctul estimat-observat.
Eroarea medie patratica a punctului determinat cu doua relevemente succesive este informatie facultativa[2]
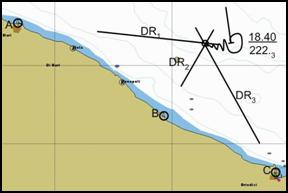
5. Determinarea punctului navei cu trei relevmente simultane
In vederea determinarii punctului navei, ofiterul de cart masoara simultan trei relevmente giro (eventual compas) Rg1, Rg2 si Rg3 la cele trei repere (fig.87). Se convertesc Rg1, Rg2 si Rg3 in relevmente adevarate Ra1, Ra2 si Ra3 si se traseaza pe harta dreptele de relevment DR1, DR2 si DR3 corespunzatoare Ra1, Ra2 si Ra3.
Cel mai probabil, punctul navei se va gasi la intersectia celor trei drepte de relevment DR1, DR2 si DR3.
Punctul navei astfel determinat se numeste, asa cum s-a vazut punct observat, si se incadreaza cu un cerc.
[Figura 87] Determinarea punctului navei cu trei relevmente simultane. Principiul metodei
Este necesar ca in momentul masurarii celor trei relevmente sa se noteze O/cl si sa se determine punctul estimat al navei.
In final se scot coordonatele punctului observat si se determina eroarea grafica E.
Algoritmul determinarii punctului navei cu trei relevmente simultane este analog procedeului de determinare a punctului navei cu doua relevmente simultane.
Observatie: Pe harta nu se vor trasa dreptele de relevment cu lungimi mari, ci doar segmente scurte (2-3 cm) in zona de intersectie, asa cum se vede in fig.88

[Figura 88] Determinarea punctului navei cu trei relevmente simultane
5.1 Reducerea erorii de nesimultaneitate
Eroarea datorata nesimultaneitatii observatiilor se considera neglijabila daca spatiul parcurs de nava in intervalul dintre masuratori, nu depaseste lungimea navei.
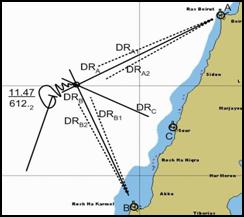
Atunci cand, din diferite motive, se depaseste aceasta limita, se va aplica procedeul reducerii observatiilor la acelasi moment; procedeul consta in masurarea unei serii de relevmente, astfel:
la ora 11.47 se masoara, la intervale egale de timp (30 sec. sau 1 min.), relevmente la reperele A, B si C, in urmatoarea succesiune :
Rg1 la A ===> Ra1 la A ===> DR A1
Rg2 la B ===> Ra2 la B ===> DR B1
Rg3 la C ===> Ra3 la C ===> DR C
Rg4 la B ===> Ra4 la B ===> DR B2
Rg5 la A ===> Ra5 la A ===> DR A2
[Figura 88] Reducerea observatiilor la acelasi moment
se calculeaza Ra la A cu relatia :
Ra A = (Ra1 + Ra5)/2
se calculeaza Ra la B cu relatia :
Ra B = (Ra2 + Ra4)/2
se traseaza drepta de relevment DR A corespunzatoare RaA calculat anterior;
se traseaza dreapta de relevment DR B ,corespunzatoare RaB;
se traseaza dreapta de relevment DR C ,corespunzatoare RaC;
La intersectia dreptelor de relevment DR A, DR B, DR C se gaseste punctul observat al navei. Punctul astfel determinat este astfel independent de eroarea de nesimultaneitate a observatiilor. Pe harta se vor trasa doar cele trei drepte de relevment.
5.2 Reducerea erorilor sistematice
In practica, cele trei drepte de relevment nu se vor intersecta, cel mai probabil, niciodata intr-un punct, ci vor forma un triunghi, numit triunghiul erorilor.
De cele mai multe ori, acest triunghi are laturile mici (sub o mila marina). in aceasta situatie, punctul observat al navei se va considera in centrul triunghiului erorilor (fig.28).
In situatia in care laturile triunghiului erorilor sunt mai mari de 1Mm, se repeta cele trei masuratori, plecand de la premiza ca s-a produs o eroare grosiera in masurarea celor trei relevmente.

[Figura 89] Triunghiul erorilor
Daca si dupa repetarea masuratorilor triunghiul erorilor are laturile mai mari de 1Mm, atunci inseamna ca masuratorile sunt afectate de o eroare sistematica.
Eroarea sistematica este, in astfel de situatii, eroarea in determinarea corectiei compasului giro/magnetic (cu care s-au executat masuratorile), si se transmite in egala masura si in acelasi sens tuturor masuratorilor.
Eliminarea erorilor sistematice se poate face la bordul navei prin doua metode:
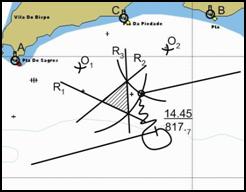
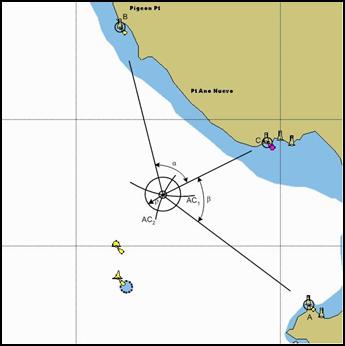
5.2.1 Metoda locurilor de egala diferenta de relevmente
Agoritm
plecand de la premiza ca dupa ce s-a repetat masurarea celor trei relevmente, s-a obtinut din nou un triunghi al erorilor cu laturi mai mari de 1Mm, se vor opera urmatoarele diferente de relevmente:
![]() = Rg3 - Rg1
= Rg3 - Rg1
![]() = Rg2 - Rg3
= Rg2 - Rg3
unde ![]() si
si ![]() sunt unghiuri orizontale obtinute din
diferentele de relevmente (fig 90);
sunt unghiuri orizontale obtinute din
diferentele de relevmente (fig 90);
[Figura 90] Metoda locurilor de egala diferenta de relevmente
se vor trasa arcele de cerc capabile de ![]() si
si ![]()
la intersectia celor doua arce capabile AC1 si AC2, se va gasi cel mai probabil punct observat al navei.
Metoda locului de egala diferenta de relevmente se aplica uzual la bordul navei, fiind simpla si precisa, urmare a faptului ca diferenta dintre relevmente elimina total eroarea sistematica in corectia compasului.
Metoda triunghiului asemenea
Relevmentele compas masurate se convertesc in relevmente adevarate si se traseaza pe harta. Se obtine astfel triunghiul erorilor a, b, c. Dupa aceasta se modifica (fie prin adaugare fie prin scadere) corectia compasului cu o valoarea arbitrara δ= 20 50. Se traseaza pe harta noile relevmente modificate cu valoare δ (fig 91).
Se obtine astfel un triunghi al
erorilor asemenea cu cel initial, format de dreptele de relevment
marite sau micsorate cu un unghi δ de valori cuprinse intre 20
![]() 50.
50.
Daca acest triunghi auxiliar al erorilor este mai mare decat primul, inseamna ca prin variatia corectiei compasului s-a marit eroarea deja existenta, iar daca este mai mic, inseamna ca noua corectie a compasului este mai apropiata de valoarea reala.
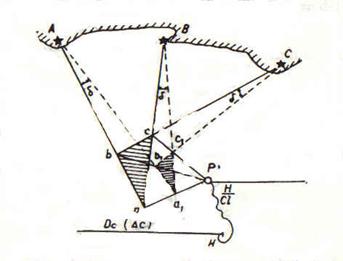
[Figura 91] Metoda triunghiului asemenea
Punctul navei se obtine la intersectia prelungirii segmentelor de dreapta care unesc varfurile aa1, bb1, cc1. ale celor doua triunghiuri ale erorilor. Acest procedeu permite ca in contiuare sa se determine si corectia reala a compasului masurand unul din relevmente si facand diferenta dintre acesta si relevmentul compas corespunzator
Metoda este mult mai grea si mai putin precisa decat cea a locurilor de egala diferenta de relevmente.
5.3 Controlul corectiei compasului
Dupa determinarea punctului observat al navei cu una dintre metodele de mai sus, se poate controla valoarea corectiei compasului cu care s-au executat masuratorile, astfel:
se uneste punctul observat al navei (determinat cu una din cele doua metode expuse mai sus) cu cele trei repere, obtinand DR1' , DR2' si DR3' (fig. 92);
se scot valorile de relevmente adevarate, corespunzatoare DR1' , DR2' si DR3', adica Ra1, Ra2 si Ra3;
se fac diferentele:
DR1' - DR1 = Ra1 - Rg1 = ![]() g1
g1
DR2' - DR2 = Ra2 - Rg2 = ![]() g2
g2
DR3' - DR3 = Ra3 - Rg3 = ![]() g3
g3
se calculeaza ![]() ca medie aritmetica a celor trei valori
obtinute mai sus :
ca medie aritmetica a celor trei valori
obtinute mai sus :
![]()
[Figura 91] Controlul corectiei compasului
Metoda se aplica similar si pentru controlul derivatei compas, doar ca relevmentele se vor masura cu compasul magnetic, iar din corectia totala compas,(obtinuta ca medie aritmetica), se va scade declinatia magnetica (din harta)
Facultativ de studiat eroare medie patratica in punct[3]
Valoarea erorii medii patratice evalueaza precizia punctului, deci gradul de incredere in punctul determinat; aceasta este calculabila cu relatia generala:
![]()
unde: θ = unghiul de intersectie a dreptelor de relevment la cele doua repere, si se masoara cu echerul din harta;
s1 si s2 = erori vectoriale ale dreptelor de relevment, calculabile cu relatiile:
![]() si
si ![]()
in care d1 si d2 sunt distantele de la punctul observat la cele doua repere (se scot din harta).

[Figura 78] Eroarea medie patratica
Inlocuind in relatia genarala, rezulta :
![]()
Eroarea medie patratica in punct are semnificatia razei cercului de incertitudine , si se exprima in Mm.
Asa cum s-a vazut, la determinarea punctului estimat-observat concura parametri observati (relevmente) si estimati (Df si mf). Ca urmare, si in relatia de calcul a erorii medii patratice in punctul estimat-observat vor intra erorile vectoriale ale dreptelor de relevment precum si eroarea medie patratica a estimei : (fig.86)
[Figura 86] Eroarea medie patratica a punctului estimat-observat
In relatia generala
![]() = cosec
= cosec![]()
se inlocuieste s1 cu valoarea sa, in care intra si eroarea medie patratica a estimei, si rezulta :
![]() est-obs = cosec
est-obs = cosec![]()
Pozitia punctului observat al navei determinat cu trei relevmente simultane este dependenta de valoarea erorilor accidentale care insotesc procesul de masurare (observare) a relevmentelor. Calculul erorii patratice in punct se face, asa cum s-a vazut, cu relatia generala :
![]()
Deoarece avem de-a face cu trei linii de pozitie, pentru a face posibila utilizarea acestei relatii, se vor efectua diferentele dintre relevmentele giro si se vor calcula erorile vectoriale ale arcelor de cerc capabile de unghiurile orizontale obtinute.
Se definesc (fig.90) :
![]() = Rg2 - Rg1 , unghiul de
intersectie a DR1 si DR2 ;
= Rg2 - Rg1 , unghiul de
intersectie a DR1 si DR2 ;
![]() = Rg3 - Rg2 , unghiul de
intersectie a DR1 si DR3 ;
= Rg3 - Rg2 , unghiul de
intersectie a DR1 si DR3 ;
AC1 = arcul de cerc capabil de unghiul
orizontal ![]() AC2 = arcul de cerc capabil de
unghiul orizontal
AC2 = arcul de cerc capabil de
unghiul orizontal ![]()
![]() = erori
vectoriale ale arcelor de cerc capabile de unghiurile orizontale
= erori
vectoriale ale arcelor de cerc capabile de unghiurile orizontale ![]() si
si ![]() , rezultate din diferenta de relevmente
giro; relatiile de calcul sunt:
, rezultate din diferenta de relevmente
giro; relatiile de calcul sunt:
o
![]()
o
![]()

[Figura 92] Eroarea medie patratica
Dupa inlocuiri rezulta:
in care ![]() = 3600 - (
= 3600 - (![]() ).
).
Eroarea
medie patratica in punctul ![]() are semnificatia razei cercului de
incertitudine, si rezulta din calculul in M
are semnificatia razei cercului de
incertitudine, si rezulta din calculul in M
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 6275
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved