| CATEGORII DOCUMENTE |
| Agricultura | Asigurari | Comert | Confectii | Contabilitate | Contracte | Economie |
| Transporturi | Turism | Zootehnie |
| Navigatie |
NAVIGATIA COSTIERA
DETERMINAREA PUNCTULUI NAVEI CU UNGHIURI ORIZONTALE
DETERMINAREA PUNCTULUI NAVEI CU UNGHIURI ORIZONTALE
SIMULTANE
Procedeul este cel mai precis dintre toate procedeele costiere de determinare a punctului navei, ca urmare a preciziei de masurare a unghiurilor cu sextantul ( 0'1).
Cu toate acestea, procedeul este pretentios, solicitand din partea observatorului experienta si o deosebita calitate a cunostintelor teoretice si practice de navigatie.
PRINCIPIUL METODEI : (fig.16)
Dupa corectarea unghiurilor, se traseaza pe harta arcele de cerc capabile de cele doua unghiuri orizontale masurate. Punctul navei se gaseste la intersectia celor doua arce de cerc, se numeste punct observat si este cel mai probabil punct al navei. Punctul navei astfel obtinut se incadreaza cu un cerc.
In practica, dupa masurarea simultana a cel putin doua unghiuri orizontale, pentru a determina grafic punctul navei, se poate aplica una din urmatoarele metode:
METODE ARCELOR DE CERC
Se va analiza aceasta metoda pe urmatorul exemplu practic :
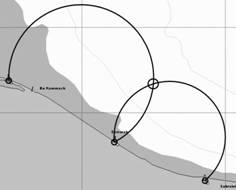
Figura 16 Principiul determinarii punctului observat cu doua unghiuri orizontale observate
Fie nava in mars in Dc = 18205 (Z). Ofiterul de cart
masoara simultan (la 12.19 / 815) unghiurile orizontale ai=47030'
intre reperele costiere A si B si ![]() I=105014'
intre B si C. Corectia indexului este (
I=105014'
intre B si C. Corectia indexului este (![]() I=+2'). Se pune problema determinarii punctului observat al
navei, utilizand cele doua masuratori.
I=+2'). Se pune problema determinarii punctului observat al
navei, utilizand cele doua masuratori.
ALGORITMUL OPERATIUNILOR LA BORD
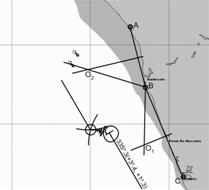
Figura 17. Metoda arcelor de cerc
- se identifica reperele si se verifica daca sunt in harta;
- se masoara unghiurile orizontale si se corecteaza :
![]()
![]()
- se citesc O si Clsi se determina punctul estimat;
- se unesc reperele,obtinand liniile de baza D1 = AB si D2 = BC ;
- se traseaza mediatoarele
liniilor de baza spre mare (daca unghiul orizontal este mai mic decat
0900) sau spre uscat (daca unghiul orizontal este mai mare
decat 0900); pentru exemplul dat arcul de cerc capabil de a se traseaza spre mare iar arcul de cerc capabil de ![]() se traseaza
spre uscat;
se traseaza
spre uscat;
- se traseaza din reperul
din mijloc (B) doua drepte inclinate cu (900 - a) fata de BA, respectiv cu (![]() -900) fata de BC;
-900) fata de BC;
- punctele 01 si
02 in care aceste drepte intersecteaza mediatoarele sunt
centrele cercurilor capabile de a si ![]()
- se traseaza un arc de cerc cu centrul in 01 cu raza
r1=01A=01B ;
- se traseaza un arc de cerc cu centrul in 02 cu raza
r2=02B=02C ;
- la intersectia celor doua arce de cerc se va gasi punctul observat al navei;
- se determina eroarea grafica E si se scot coordonatele punctului observat;
- se calculeaza eroarea medie patratica in punct.
METODA SEGMENTELOR
Principiul acestei metode este acelasi cu al metodei arcelor de cerc. Se aplica in practica doar atunci cand, din diferite motive, navigatorul nu are asupra sa decat echere.
Pentru determinarea punctului observat al navei, se va poceda astfel :(fig.19)
- se construiesc liniile de baza D1 si D2;
- se traseaza perpendicularele pe D1 si D2 in A si C astfel :
-
spre mare daca ![]() <900 ;
<900 ;
-
spre uscat daca ![]() > 900;
> 900;
- se traseaza drepte
inclinate cu 900-![]() spre mare, respectiv
spre mare, respectiv ![]() -900 spre
uscat;
-900 spre
uscat;
- se unesc punctele de intersectie E si F ;
- punctul obsevat (P) se gaseste coborand o perpendiculara din reperul din mijloc pe EF.
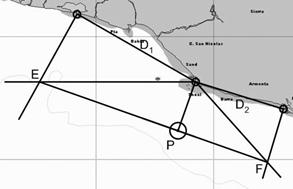
Figura 19 Metoda segmentelor
4. DETERMINAREA PUNCTULUI NAVEI CU RELEVMENTE SIMULTANE
4.1 DETERMINAREA PUNCTULUI NAVEI CU DOUA RELEVMENTE SIMULTANE
PRINCIPIUL METODEI
In vederea determinarii punctului navei, ofiterul de cart masoara simultan doua relevmente giro (erentual compas) Rg1 si Rg2 la doua repere (fig.23). Se convertesc Rg1 si Rg2 in relevmente adevarate Ra1 si Ra2 si se traseaza pe harta dreptele de relevment DR1 si DR2, prin cele doua repere.
Cel mai probabil, punctul navei se va gasi la intersectia celor doua drepte de relevment DR1 si DR2.
Punctul navei astfel determinat se numeste, punct observat si se inconjoara cu un cerc.
Este necesar ca in momentul masurarii celor doua relevmente Rg1 si
Rg2 sa se noteze ora si citirea la loch (l20/414.9) si sa se determine punctul estimat al navei.

Figura 2 Determinarea punctului navei cu doua relevmente simultane
Se defineste eroarea grafica si se noteaza cu E, distanta grafica exprimata in M dintre punctul estimat si punctul observat ; in plus eroarea grafica exprima si orientarea punctului observat fata de punctul estimat.
Pentru figura 23 , E = (2M,350o).
4.2. DETERMINAREA PUNCTULUI NAVEI CU TREI RELEVMENTE SIMULTANE
PRINCIPIUL METODEI
In vederea determinarii punctului navei, ofiterul de cart masoara simultan trei relevmente giro (eventual compas) Rg1, Rg2 si Rg3 la cele trei repere (fig.26). Se convertesc Rg1, Rg2 si Rg3 in relevmente adevarate Ra1, Ra2 si Ra3 si se traseaza pe harta dreptele de relevment DR1, DR2 si DR3 corespunzatoare Ra1, Ra2 si Ra
Cel mai probabil, punctul navei se va gasi la intersectia celor trei drepte de relevment DR1, DR2 si DR
Punctul navei astfel determinat se numeste, asa cum s-a vazut punct observat, si se incadreaza cu un cerc.
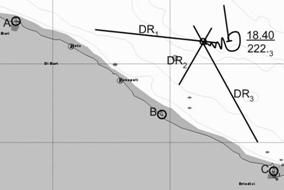
Figura 26. Determinarea punctului navei cu trei relevmente simultane. Principiul metodei
Este necesar ca in momentul masurarii celor trei relevmente sa se noteze O/CI si sa se determine punctul estimat al navei.
In final se scot coordonatele punctului observat determinat, si se determina eroarea grafica E.
REDUCEREA ERORILOR SISTEMATICE
In practica, cele trei drepte de relevment nu se vor intersecta, cel mai probabil, niciodata intr-un punct, ci vor forma un triunghi, numit triunghiul erorilor.
De cele mai multe ori, acest triunghi are laturile mici (sub o mila marina). in aceasta situatie, punctul observat al navei se va considera in centrul triunghiului erorilor (fig.28).
In situatia in care laturile triunghiului erorilor sunt mai mari de 1M, se repeta cele trei masuratori, plecand de la premiza ca s-a produs o eroare grosiera in masurarea celor trei relevmente.

Figura 28. Triunghiul erorilor
Daca si dupa repetarea masuratorilor triunghiul erorilor are laturile mai mari de 1M, atunci inseamna ca masuratorile sunt afectate de o eroare sistematica.
Eroarea sistematica este, in astfel de situatii, eroarea in determinarea corectiei compasului giro/magnetic (cu care s-au executat masuratorile), si se transmite in egala masura si in acelasi sens tuturor masuratorilor.
Eliminarea erorilor sistematice se poate face la bordul navei prin doua metode:
METODA LOCURILOR DE EGALA DIFERENTA DE RELEVMENTE
ALGORITM
1- plecand de la premiza ca dupa ce s-a repetat masurarea celor trei relevmente, s-a obtinut din nou un triunghi al erorilor cu laturi mai mari de 1M, se vor opera urmatoarele diferente de relevmente:
![]() = Rg3 - Rg1
= Rg3 - Rg1
![]() = Rg2 - Rg3
= Rg2 - Rg3
unde ![]() si
si ![]() sunt unghiuri orizontale obtinute din
diferentele de relevmente;
sunt unghiuri orizontale obtinute din
diferentele de relevmente;
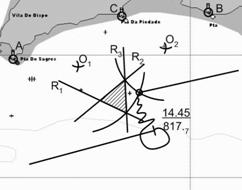
Figura 29. Metoda locurilor de egala diferenta de relevmente
2 - se vor trasa arcele de cerc
capabile de ![]() si
si ![]()
3 - la intersectia celor doua arce capabile AC1 si AC2, se va gasi cel mai probabil punct observat al navei.
Metoda locului de egala diferenta de relevmente se aplica uzual la bordul navei, fiind simpla si precisa, urmare a faptului ca diferenta dintre relevmente elimina total eroarea sistematica in corectia compasului.
4. CONTROLUL CORECTIEI COMPASULUI
Dupa determinarea punctului observat al navei cu una dintre metodele de mai sus, se poate controla valoarea corectiei compasului cu care s-au executat masuratorile, astfel: (fig. 30a)
- se uneste punctul observat al navei (determinat cu una din cele doua metode expuse mai sus) cu cele trei repere, obtinand DR1' , DR2' si DR3'
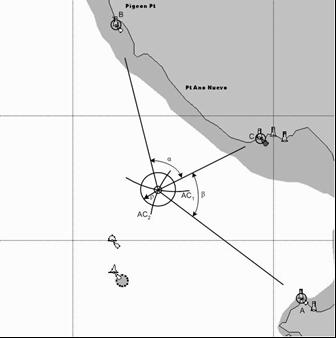
Figura 30.a Controlul corectiei compasului
- se scot valorile de relevmente adevarate, corespunzatoare DR1' , DR2' si DR3' , adica Ra1, Ra2 si Ra3 ;
- se fac diferentele:
DR1' - DR1 = Ra1 -
Rg1 = ![]() g1
g1
DR2' - DR2 = Ra2 -
Rg2 = ![]() g2
g2
DR3' - DR3 = Ra3 -
Rg3 = ![]() g3
g3
- se calculeaza ![]() ca medie aritmetica a celor trei valori
obtinute mai sus :
ca medie aritmetica a celor trei valori
obtinute mai sus :
![]()
Metode se aplica similar si pentru controlul derivatei compas, doar ca relevmentele se vor masura cu compasul magnetic, iar din corectia totala compas,(obtinuta ca medie aritmetica), se va scade declinatia magnetica (din harta)
5.1.CAZUL GENERAL. DETERMINAREA PUNCTULUI NAVEI PRIN TRANSPORTUL
PRIMEI DREPTE DE RELEVMENT
Fie situatia din figura 32 . Nava masoara Rg1 la farul F la ora 12.00, iar la ora 12.30 masoara al doilea relevment Rg2 la acelasi far; se pune problema determinarii punctului navei.
PRINCIPIUL METODEI
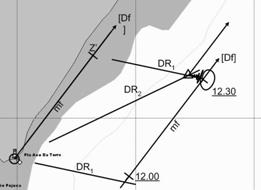
Figura 32. Determinarea punctului navei prin transportul
primei drepte de relevment
Dupa convertirea celor doua relevmente, trasarea pe harta a dreptelor de relevment corespunzatoare si detreminarea punctelor estimate ale navei la orele 12.00 si 12.30, se va trasa drumul real al navei (Df) prin farul F, se va masura pe acest drum spatiul real parcurs de nava intre cele doua masuratori (mf), iar prin punctul fictiv Z' obtinut se va transla dreapta de relevment DR1.
Punctul navei obtinut la intersectia DR2 si DR1 transportata prin Z' se numeste punct estimat-observat, se incadreaza cu un triunghi si este cel mai probabil punct al navei.
6. DETERMINAREA PUNCTULUI NAVEI CU DISTANTE
DETERMINAREA DISTANTEI LA UN REPER DIN UNGHI VERTICAL MASURAT CU
SEXTANTUL
In navigatia costiera, distantele la reperele costiere se determina prin masurarea, cu sextantul, a unghiului vertical sub care acestea se vad de pe nava. Conditiile pe care trebuie sa le indeplineasca reperul de navigatie este ca pozitia si inaltimea sa deasupra nivelului zero al marii sa fie trecute cu precizie in harta.
Relatia de calcul a distantei la reper se deduce astfel :
(19) 
Pentru a evita calculele, se poate
utiliza tabla 7 DH - 90. Se va intra pe coloana corespunzatoare H[m], de
sus in jos, pana se identifica [ in grade si minute] a unghiului
vertical ![]() Pe linia corespunzatoare, in partea din
stanga a paginii, se va identifica d [M] .
Pe linia corespunzatoare, in partea din
stanga a paginii, se va identifica d [M] .
b) Deviatia radio
Este provocata de prezenta obiectelor metalice de la bordul navei in jurul antenei cadru (emitatoare secundare). Deviatia radio (d r ) reprezinta diferenta intre relevmentul prova masurat optic si relevmentul prova radio goniometrat la un radiofar.
Formula deviatie radio este:
(6.1) d r = f = Rp - Rpr
d) Linii de pozitie radio
Relevmentul radio (Rar) este unghiul format intre planul meridianului adevarat al locului si planul vertical care trece prin punctul navei si punctul RF.
In cazul distantelor mici (pana la 20 Mm) Rar poate fi comparat cu un relevment vizual. Pentru a fi trasat pe harta, Rpr trebuie corectat functie de dr si convertit in Rar:
(6.6) Rp = Rpr + dr
(6.7) Rar = Rp + Da
La radiogoniometrele actuale, pe langa cercul azimutal fix, pe care citim Rpr, avem si un cerc azimutal mobil, respectiv un repetitor giro. Astfel ca, odata cu citirea Rpr, vom citi si relevmentul giro radio (Rgr). Din tabla de deviatii a radiogoniometrului, functie de Rpr vom scoate dr si apoi vom efectua convertirea functie de Dg:
(6.8) Rar = Rgr + dr + Dg
e) Determinarea punctului navei cu relevmente radio
Orice relevment radio determina o linie de pozitie radio. Pentru a putea determina punctul navei avem nevoie de minim doua astfel de linii de pozitie sau o linie de pozitie radio si minim o alta linie de pozitie de alt tip. Punctul navei determinat pe baza liniilor de pozitie radio se noteaza cu un romb cu un punct in centru (
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 751
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved