| CATEGORII DOCUMENTE |
| Demografie | Ecologie mediu | Geologie | Hidrologie | Meteorologie |
UNIVERSITATEA ECOLOGICA DIN BUCURESTI
FACULTATEA DE INGINERIE MANAGERIALA
MASTER: Ingineria si Managementul Integrat al Mediului in Activitati Industriale
Utilizarea tehnicilor fuzzy in controlul inteligent al proceselor de mediu ambiant
1.1. SISTEME CU LOGICA FUZZY
Metodele traditionale de modelare a procesului side analiza a sistemelor se pot folosi numai atunci cand se pot determina relatii intre variabilele sistemului, ca de exemplu ecuatii diferentiale intre variabilele de intrare si iesire. Insa interventia factorului uman in sistemele analizate impune analiza unor variabile care nu au valori numerice concrete, fiind variabile lingvistice, definite prin multimi fuzzy. Metodele fuzzy sunt o alternativa de proiectare pentru procese si sisteme foarte complexe. Variabilele fuzzy sau lingvistice nu descriu datele numeric, ci printr-o functie de apartenenta care este scalata intre zero si unu.
Operatiile executate cu variabilele fuzzy si regulile fuzzy aferente nu pornesc de la modele precise ale procesului, ci de la intelegerea fenomenelor fizice, ca de exemplu:
IF (temperatura este mare) THEN (comanda scade)
Sistemele de conducere cu modele si algoritmi fuzzy sunt mai flexibile decat sistemele conventionale, deoarece modificarea regulilor de deductie a marimii de comanda se poate face prin adaugarea de noi variabile lingvistice, fiind deci mai elastice in proiectare. Deoarece proiectarea sistemelor de conducere cu regulatoare cu logica fuzzy (RLF) nu se face pentru un model dat al procesului si nici pentru anumite valori ale parametrilor acestuia, rezulta ca aceste sistemele sunt mai robuste, avand performante acceptabile intr-o gama relativ larga de variatie a parametrilor procesului. Insa sistemele de conducere cu RLF sunt mai greu de proiectat pentru cazul cand sunt mai mult de doua intrari in regulator sau atunci cand acesta are mai multe marimi de comanda, ceea ce se impune in cazul proceselor multivariabile.
1.2. ETAPE IN PROIECTAREA SISTEMELOR CU RLF:
Principalele etape in proiectarea unui sistem cu logica fuzzy sunt:
a) Fuzificarea variabilelor inseamna reprezentarea unor variabile printr-o multime fuzzy, definita printr-o functie de apartenenta. Scrierea functiilor de apartenenta pentru o variabila fuzzy necesita cunoasterea domeniului de definitie a acesteia si a valorilor corespunzatoare ale ordonatei. De exemplu, functia de apartenenta:
are graficul prezentat in fig. 1.1.
b) Metodele pentru defuzificare servesc pentru determinarea unei valori reale (crisp) atunci cand se da functia sa de apartenenta. Cea mai utilizata metoda pentru defuzificare este metoda centrului de arie, care are ca sens fizic, fig. 1.2, determinarea acelei valori a argumentului care imparte suprafata S in doua arii ponderate S1 si S2, adica
Fig.1.2
Comparand metodele existente pentru defuzificare, acestea difera prin numarul de calcule necesare, prin gradul de reducere al fuzicitatii, prin volumul de date care trebuie memorate, prin modul de folosire a concluziilor operatorului uman si prin performantele obtinute in conducerea procesului (oscilatii intretinute, etc.)
c) Proiectarea tabelului de reguli (de deductie) se face pe baza experientei operatorului uman, al expertului in proiectarea sistemica si consta in completarea locatiilor tabelului de reguli cu variabilele lingvistice ale comenzii. Tabelul poate avea doua forme: pentru o variabila fuzzy de intrare ( Tabel 1) si pentru doua variabile fuzzy ( Tabel 2), ceea ce depinde de numarul de intrari (eroare, derivata erorii, etc.) ale RLF.
Tabel 1
|
e |
.........P........... |
|
U |
..........PM............ |
Tabel 2
|
|
PB | ||
|
e | |||
|
N |
P |
d) Determinarea functiei de apartenenta a comenzii. Aceasta operatie are ca scop utilizarea tabelului de reguli pentru calculul functiilor de apartenenta ale comenzii atunci cand se dau valori concrete ale variabilelor de intrare ale RLF. Prin utilizarea tabelului de reguli rezulta mai multe reguli de forma:
functiile de apartenenta ale erorii, derivatei erorii si ale comenzii .
![]()
unde mie mje mke sunt functiile de apartenenta ale erorii, derivatei erorii si ale comenzii.
e) Alegerea solutiei tehnologice de proiectare a RLF. Pentru implementarea unui RLF se folosesc trei metode: software, metoda tabelelor si metoda hardware. Prin metoda software toate operatiile logice si aritmetice se executa prin programul unitatii centrale a RLF. Metoda tabelelor de implementare a unui RLF consta in determinarea valorilor comenzii pentru seturi cat mai mari de valori ale variabilelor de intrare ale RLF. Metoda hardware de implementare a RLF consta in utilizarea unor circuite integrate specializate destinate pentru functii cu variabile fuzzy. Factorii care determina alegerea unei solutii tehnologice pentru proiectarea RLF sunt: viteza de calcul, rezolutia si complexitatea (costul) echipamentului de modelare sau conducere a unui proces.
Observatie: In unele lucrari se foloseste termenul "vag" in loc de fuzzy. In mod curent, termenul "vag" inseamna lipsa de informatii, ca de exemplu afirmativ "cartea este undeva", nu specifica subiectul, care carte si nici locul. Afirmatia "cartea este pe masa" poate fi o propozitie fuzzy daca din context se cunoaste despre care carte se afirma.
f) Utilizarea algoritmilor fuzzy in diagnoza proceselor tehnologice si a sistemelor de conducere. Pentru diagnoza se pot folosi metode probabilistice, care insa necesita o cunoastere precisa a modelelor matematice care descriu starea de functionare, ceea ce in practica este foarte dificil de obtinut. Metodele fuzzy necesita o formalizare a experientei operatorului uman, paralel cu folosirea unei descrieri matematice generale a procesului, nefiind necesara determinarea modelelor matematice.
1.3. CONDUCEREA PRIN TEHNICI FUZZY A INSTALATIEI DE TRATARE A APELOR REZIDUALE DIN ORASE
Eliminarea azotului si fosfatilor din apele reziduale municipale necesita metode de stabilizare a procesului de tratare a apei. Procesul de purificare biologica este caracterizat de existenta unor neliniaritati, de parametrii variabili in timp si de interdependente (cuplari) multivariabile. In prezent statiile de epurare a apelor au cel mult o bucla de reglare; problemele de regim de functionare (de exemplu pentru debite mari de intrare) se rezolva prin supradimensionarea volumelor de tratare.
Statia de epurare consta dintr-un reactor anaerobic pentru inlaturarea fosforului biologic, o aerare bio pentru nitrificare si denitrificare si un vas de sedimentare, fig. 1.3. Aceasta statie are o incarcatura organica echivalenta unui oras cu 18.000 de locuitori. Pentru ca efluentul sa aiba o anumita calitate sunt necesare masurile (1) aprovizionarea cu oxigenul necesar pentru nitrificare si denitrificare (2) dozajul de precipitat pentru inlaturarea fosforului aditional (3) coeficientul de raport la ape returnate (4) eliminarea surplusului de rezidiu activat.
Prin metodele tehnicii fuzzy s-a rezolvat problema conducerii procesului de aerare. Eliminarea azotului si fosforului necesita trei zone diferite, doua fiind determinate de aerarea intermitenta intr-un tanc (vas) si a treia in vas anaerobic. Debitul de influent se schimba mult in timp, ca si concentratia apelor reziduale si deci planificarea aerarii nu poate fi fixa, ceea ce recomanda utilizarea unui RLF, care are ca intrari semnalele prezentate in fig. 1.4. Structura RLF pentru comanda oxigenului in procesul de aerare:
Fig.1.4
Valorile comenzii sunt on/off si determina comutarea alimentarii cu oxigen. Regulile si variabilele fuzzy utilizate sunt date in tabelul:
|
Nox |
ratio |
On/off |
|||
|
L |
H |
Y |
|||
|
L |
M |
Y |
|||
|
L |
L |
Y |
|||
|
M |
H |
Y |
|||
|
M |
M |
N |
|||
|
|
L |
N |
Fig.1.5
Experimentarile s-au facut schimband debitul de ape reziduale la t=0 de la 3030 m3/zi la 5030 m3/zi si considerand concentratiile neschimbate. S-a masurat concentratia la iesire de azot anorganic si s-a constatat ca un RLF, fig. 1.5, ofera performante mai bune decat un regulator P-conventional.
O alta problema rezolvata cu RLF a fost procesul de dozare a apei din reziduul eliminat.
In acest exemplu este important de remarcat ca s-au folosit elementele de executie si senzorii existenti, inlocuind numai regulatorul clasic cu un RLF. Deoarece pentru instalatii de dimensiuni mici se poate determina un model matematic precis, experimentarile se pot face prin simulare pe MATLAB/SIMULINK, ceea ce permite alegerea structurii regulatorului cu logica fuzzy si acordarea lui optima. Experimentarile se pot face pentru diferite (sarcini) semnale de intrare, masurandu-se concentratiile de azot, de oxigen, de amoniac si nitrati/nitriti la iesirea instalatiei.
1.4. UTILIZAREA REGULATOARELOR CU LOGICA FUZZY IN AUTOMATIZAREA UNUI REACTOR DE FERMENTATIE PENTRU TRATAREA DESEURILOR PENTRU BIOGAZ
Procesul de fermentatie anaerobica a apelor reziduale poluate este caracterizat printr-un model matematic de mare complexitate. O mare problema o reprezinta (nsasi stabilizarea functionarii (n jurul unei referinte, datorita urmatoarelor cauze:
(n aceste procese exista o multitudine de variante de microorganisme, diferite ca specie, ca structura functionala si care interactioneaza prin relatii necunoscute.
nu exista senzori specifici aplicatiei, fiabili si ieftini.
Ca o alternativa la metodele clasice de automatizare s-au folosit regulatoare cu logica fuzzy (RLF), care formalizeaza intr-o descriere matematica relevanta informatia calitativa folosita de catre operatorul uman in conducerea normala a procesului. Prin utilizarea RLF in conducerea reactoarelor de fermentatie anaeroba nu mai este necesar un model matematic, ci trebuie cunoscute numai relatiile intre variabilele de intrare si iesire ale procesului.
O structura posibila a bazei de reguli a RLF este descrisa de o multime de reguli fuzzy de forma:
unde - E (i dE sunt eroarea (i derivata erorii.
- U (i dU sunt marimea de comanda si derivata acesteia
- A, B, C sunt submultimi fuzzy pe domeniul de valori U, V, W al variabilelor E, dE si dU
In cazul reactorului de fermentatie pentru obtinerea biogazului, prezentat simplificat in fig.1.6, marimea de iesire controlata este productia de biogaz, eroarea este e = r - y, iar marimea de comanda este viteza de diluare.

Fig 1.6
Proiectarea RLF se face (n urmatoarele etape:
- fuzificarea variabilelor E, dE si dU conform domeniilor de definitie, folosind in aceasta aplicatie 7 variabile lingvistice: -H; -M; -L; 0; +L; +M; +H
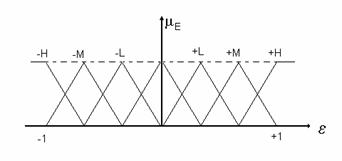
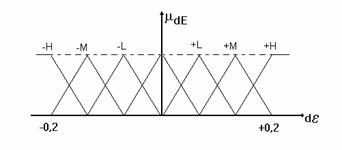
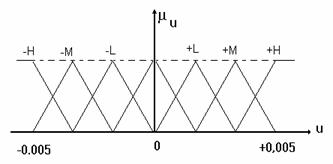
Alegerea acestor functii de apartenenta necesita cunostinte de tip expert privind desfasurarea procesului.
definirea tabelului cu multimea de 49 de reguli, conform cu numarul de variabile fuzzy alese
se foloseste implicatia pentru determinarea regulii lingvistice pentru a calcula marimea de comanda
|
EdE |
-H |
-M |
-L |
+L |
+M |
+H |
|
|
+H |
+L |
-M |
-H |
-H |
-H |
-H |
|
|
+M |
+L |
-L |
-M |
-M |
-H |
-H |
|
|
+L |
+M |
+L |
-L |
-L |
-M |
-H |
|
|
+M |
+M |
+L |
-L |
-M |
-M |
||
|
-L |
+H |
+M |
+L |
+L |
-L |
-L |
|
|
-M |
+H |
+H |
+M |
+M |
+L |
-L |
|
|
-H |
+H |
+H |
+H |
+H |
+M |
+L |
Rj : IF ( is (ie AND dE is mjde THEN u is mku
pentru Rj=1-9, conform tabelului.
Pe baza acestor reguli s-a (ntocmit un tabel care cuprinde valorile comenzii pentru valorile variabilelor de intrare: eroare si derivata erorii. O problema importanta este acordarea RLF. O metoda practica de acordare consta in modelarea procesului si acordarea regulatorului RLF prin simulare.
Calculul valorii marimii de comanda se face pentru fiecare regula si apoi se face o operatie de reuniune. Astfel prima etapa a unei reguli este :
min[(ie (e) , mjde de
apoi operatia logica a unei reguli fuzzy:
min
dupa care se grupeaza cele patru reguli
max min
e
Prin aplicarea metodei pentru defuzificare CoA se calculeaza valoarea reala a comenzii la momentul respectiv de esantionare pentru care s-au calculat valorile erorii de reglare si a derivatei acesteia. in fig. 1.8 se prezinta curba de variatie a productiei reactorului de fermentatie anaeroba a apelor uzate.
fig.1.8
Valoarea referintei se calculeaza (n functie de dimensiunile reactorului si de debitul maxim de influent posibil in timp.
1.5. ALGORITMI FUZZY DE CONDUCERE SI PROCESARE NUMERICA A SEMNALELOR LA VASE DE PRECIPITARE ( IN DECANTOARE )
Restrictiile regulamentelor ecologice si cresterea costurilor de fabricatie impun optimizarea proceselor. Metodele conventionale necesita perfectarea unor modele matematice precise, ceea ce necesita un timp lung si in plus nu ofera mari avantaje economice, cel mult cat cheltuielile pentru un lucrator pe an. Un pas inainte a fost proiectarea de sisteme multivariabile de reglare, care insa necesita modele matematice si mai complexe. Din aceste motive multe procese sunt conduse manual. Metodele cu RLF, care reprezinta o alternativa de utilizare in proiectare a experientei operatorului uman, constituie o noua strategie chiar si pentru procese multivariabile ( MV ), rezolvnd probleme complexe cu pret minim.
Procesul de decantare de la fabricarea penicilinei, urmeaza procesului de fermentatie si are ca scop extragerea penicilinei folosind solventi. Deseurile de productie contin microorganisme moarte si saruri de nutrienti, reprezent(nd un bun fertilizator, care este supus unui proces de uscare.
Separarea masei uscate si a lichidului se face (in doua etape, primul de decantare si al doilea de vaporizare, fig. 1.9.)
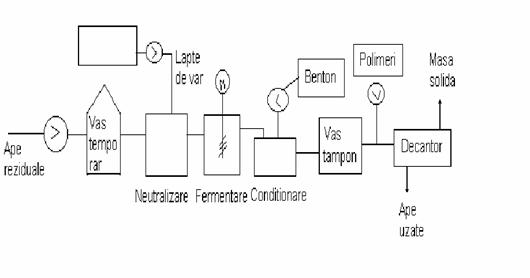
La inceput are loc un proces de neutralizare cu lapte de var, apoi o degradare biologica in fermentator, apoi intr-un reactor unde se adauga bentonita pentru precoagularea masei, apoi o imbogatire cu polimeri cationici, dupa care separarea in decantor. Polimerul cationic descarca electric suprafata de particule si are loc coagularea. Adaosurile de bentonita si de polimeri au o mare influenta asupra drenarii in decantor si deci este necesara optimizarea dozarii acestor chimicale. Pentru aceasta se masoara turbiditatea si conductivitatea (cu cat este mai mare cu atat este mai multa apa). Daca se introduce o cantitate prea mare de polimeri separarea prin centrifugare este mai dificila. Dependenta puterii de separare este definita de conductivitatea solutiei, prin graficul din fig. 1.10.
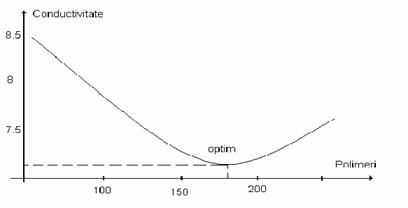
Punctul optim este unde este minimul conductivitatii, dar acest optim se deplaseaza din cauze exogene. Dar, deoarece nu se pot obtine modele matematice ale procesului, pozitia optimului poate fi dedusa din evaluarea reactiilor sistemului la modificarea dozarii cu polimer (deci un regulator extremal). Daca drenarea devine mai buna, atunci modificarea dozarii este in directia buna si se repeta. In apropierea optimului variatiile conductivitatii sunt mai mici la modificarea dozarii polimerului.
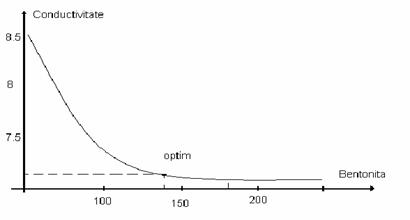
Adaugarea bentonitei pana la o valoare optimala imbunatateste procesul de drenare dupa care nu mai influenteaza, dar nici nu aduce daune. Deci este o dependenta de forma din fig. 1.11, de unde rezulta ca dozarea de bentonita trebuie mentinuta la o valoare cat mai mica, pentru economie de materiale.
Bentonita are un efect cu timp mort, pe cand la adaos de polimeri
efectul este mai rapid. Din acest motiv prima regula de control se refera la
efectul variatiei debitelor polimerilor. Al doilea bloc de reguli trebuie sa
verifice primul bloc de reguli. Deci la regulatorul RLF se introduc doua
semnale, de la 2 senzori, de turbiditate si conductibilitate. Aceste semnale
sunt preprocesate, deoarece acestea sunt insotite de zgomote de la sistemul de
masurare sau datorita conditiilor de mediu. In acest scop se foloseste o
filtrare numerica, o liniarizare a caracteristicilor neliniare in circuitul de
masurare. Aceste masurari se fac cu o perioada de esantionare de un minut.
Pentru ca filtrarea zgomotelor si alte operatii de preprocesare necesita un
volum mare de calcule, in circuitul de masurare se foloseste un calculator
personal. Pentru buna desfasurare a procesului este necesara cunoasterea
raportului (polimer+bentonita)/(debit intrare in decantor si in vas tampon).
Structura generala a blocului de preprocesare si de informatie  este in fig. 1.12.
este in fig. 1.12.
Structura RLF este data in fig. 1.13:
Implementarea algoritmului de conducere cu RLF a ridicat probleme in special la adaptarea semnalelor de la senzori,precum si la filtrarea numerica si operatiile de postprocesare. Intretinerea unui sistem de conducere cu RLF este mai simpla si eficienta tehnico-economica este mai ridicata, decat in cazul automatizarilor cu rezultate conventionale.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3118
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved