| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
DOCUMENTE SIMILARE |
|

VILNIAUS GEDIMINO TECHNIKOS UNIVERSITETAS
ANTANO GUSTAI�IO AVIACIJOS INSTITUTAS
AVIACIJOS PRIETAIS� KATEDRA
Orlaivio t�pimo sistem�, pagr�st� palydovini� sistem� panaudojimu, analiz� ir tyrimas
Baigiamasis magistro darbas
Elektros ir elektronikos in�inerija
![]()


![]()


Turinys
|
�vadas | ||
|
T�pimo sistem� ap�valga | ||
|
Pirmosios tupdymo sistemos | ||
|
Tupdymo pagal prietaisus sistema (ILS) | ||
|
Mikrobangin� tupdymo sistema (MLS) | ||
|
TSO-C129 techninio standarto reikalavimai t�pimo pagal prietaisus GPS avionikos �rangai | ||
|
Pritaikomumas | ||
|
Reikalavimai A klas�s �rangai | ||
|
Reikalavimai B klas�s �rangai | ||
|
Reikalavimai C klas�s �rangai | ||
|
Palydovin�s tupdymo sistemos | ||
|
Automatinis orlaivi� art�jimas ir t�pimas pasinaudojant GPS | ||
|
Automatinis leidimasis �prastiniais metodais ir pasitelkiant GPS | ||
|
Art�jimo t�pti proced�ros | ||
|
Art�jimas t�pti pagal GPS | ||
|
GPS matavimai | ||
|
T�pimas tik su GPS | ||
|
T�pimas su GPS ir auk�tima�iu | ||
|
T�pimas su diferencine GPS | ||
|
T�pimas su CDGPS | ||
|
Precizinis orlaivi� tupdymas panaudojant pseudolitus | ||
|
Sistemos ap�valga | ||
|
Centimetrinio lygio pad�ties nustatymas | ||
|
Integrini� �vyturi� (pseudolit�) tupdymo sistem� istorija | ||
|
Reikalaujami navigaciniai parametrai | ||
|
Tikslumas | ||
|
T�stinumas | ||
|
Pseudolit� architekt�ra | ||
|
Doplerinis �vyturys | ||
|
Universalus �vyturys | ||
|
Matomumo analiz� | ||
|
Matric� formulavimas | ||
|
Pseudolit� suderinamumas | ||
|
Pseudolit� signal� strukt�ra | ||
|
�Arti-Toli� problema | ||
|
Pseudolit� signal� formavimo pasi�lymai | ||
|
Pseudolit� charakteristikos | ||
|
Pseudolit� su vienodais Gold�io kodais atskyrimas | ||
|
Pseudolit� su skirtingais kodais atskyrimas | ||
|
Imtuvai pritaikyti priimti pseudolit� signalus | ||
|
Atsparumas pseudolit� signalams | ||
|
Ne�lio faz�s skirtumin� GPS | ||
|
Ne�lio faz�s nevienareik�mi�kumas | ||
|
Ne�lio faz�s nevienareik�mi�kumo skiriamoji geba | ||
|
Nevienareik�mi�kumo i�sprendimas naudojant pseudolitus | ||
|
Sinchrolitai | ||
|
Skirtuminiai sinchrolito matavimai | ||
|
Sinchrolit� skirtumin� navigacija | ||
|
Sinchrolit� navigacijos geometrija | ||
|
Sinchrolit� navigacija, kai ne�inomi v�linim� laikai | ||
|
Matavimai su vienu sinchrolitu | ||
|
Matavimai vienu palydovu | ||
|
Eksperimentiniai skryd�iai | ||
|
Centimetrinio lygio tikslumo kiekybinis �vertinimas | ||
|
Pozicij� tikrinimas pagal nepriklausom� GPS jutikli� statinius matavimus | ||
|
Nustatytos pozicijos dinaminis palyginimas naudojant GPS su IRU | ||
|
Piper Dakota eksperimentiniai skryd�iai | ||
|
BEECHCRAFT KING AIR eksperimentiniai skryd�iai | ||
|
BOEING 737 eksperimentiniai skryd�iai | ||
|
Navigacinis sprendinys (dvimatis pavyzdys) | ||
|
Simetrinio sprendinio pavyzdys, kai naudojami ant�eminiai si�stuvai | ||
|
Palydov� pasirinkimas ir tikslumo praradimo faktorius | ||
|
Tipi�ko GDOP skai�iavimo pavyzdys. Keturi� palydov� atvejis | ||
|
GPS nustatytos pad�ties duomen� transformavimas | ||
|
ECEF koordina�i� sistema. Koordina�i� transformavimas tarp ECEF ir LLA | ||
|
Vertimas i� LLA � ECEF | ||
|
Vertimas i� ECEF � LLA | ||
|
GPS auk��iai | ||
|
Koordina�i� transformavimas tarp skirting� atramini� sistem� | ||
|
Duomen� vertimas | ||
|
Tikslumo praradimo faktorius | ||
|
Geometrija | ||
|
Vartotojo tikslumo paklaida (UERE) | ||
|
�vair�s tikslumo praradimo faktoriai (DOP) | ||
|
HDOP ir VDOP palyginimas | ||
|
GPS matavim� paklaidos Vilniaus oro uosto zonoje | ||
|
Pseudolito pad�ties Vilniaus Tarptautiniame oro uoste parinkimas | ||
|
Publikuotas straipsnis I�vados Literat�ra |
Paveiksl�li� s�ra�as
|
Viena pirm�j� orlaivio tupdymo sistem�. | ||
|
Kursinio radijo vedlio formuojam� signal� vaizdas | ||
|
ILS skirstymas � kategorijas | ||
|
ILS sistemos darbo principas | ||
|
Nuolyd�io radijo vedlio formuojam� signal� vaizdas | ||
|
Borto prietais� parodymai �vairiuose skryd�io re�imuose | ||
|
MLS sistemos formuojam� signal� vaizdas | ||
|
MLS signalas | ||
|
MLS antena | ||
|
Bazinio GPS ir GPS su WAAS funkcija tikslumo palyginimas | ||
|
Kombinuotos navigacijos ir tupdymo sistemos blokin� schema | ||
|
GPS automatinio tupdymo sistemos blokin� schema | ||
|
Pseudolit� panaudojimas orlaivi� tupdymui pagal III kategorij� | ||
|
Tupdymo sistemos blokin� schema | ||
|
Vektori� geometrija | ||
|
Vektori� geometrija | ||
|
Pseudolito �Arti-toli� problema | ||
|
Minimalus atstumas tarp pseudolit� | ||
|
Ne�lio faz�s matavimas ir sveik� ciklo dali� nevienareik�mi�kumas | ||
|
Ne�lio faz�s nevienareik�mi�kumo sprendinio suradimas pseudolitu | ||
|
Sinchrolito atspind�tas GPS palydovo signalas | ||
|
Skirtumini� sinchrolito atstum� matavimai | ||
|
DGPS pad�ties nustatymas sinchrolitais | ||
|
PDOP trims optimaliai i�d�stytiems pseudolitams | ||
|
DGPS navigacija su vienu sinchrolitu | ||
|
Pirmasis orlaivio t�pimas su IBLS sistema | ||
|
IBLS bandymai | ||
|
Vienas i� 110 automatini� BOEING 737 nusileidim� | ||
|
BOEING 737 IBLS borto �ranga | ||
|
BOEING 737 nusileidim� dispersija | ||
|
Absoliutin� vertikalioji paklaida BEECHCRAFT KING AIR bandym� metu | ||
|
Simetrinio sprendinio pavyzdys, kai naudojami ant�eminiai si�stuvai | ||
|
Iteracij� rezultatai | ||
|
ECEF koordina�i� sistemos a�ys | ||
|
Elipsoido parametrai | ||
|
ECEF ir atraminis elipsoidas | ||
|
Ry�ys tarp atraminio elipsoido, geoido ir �em�s pavir�iaus | ||
|
Si�stuv� pad�ties �taka matavimo tikslumui | ||
|
Pagrindinis TRIMBLE OFFICE programos darbo langas ir steb�jim� ta�ko koordina�i� pasirinkimas | ||
|
Matom� GPS ir GLONASS palydov� skai�iaus kitimas vir� Vilniaus paros b�gyje | ||
|
Konkre�ios DOP reik�m�s Vilniaus oro uostui 2005 04 07 | ||
|
Galimi skai�iavimuose naudoti pseudolito pad�ties ta�kai | ||
|
HDOP
ir VDOP priklausomyb� nuo platumos esant | ||
|
HDOP
ir VDOP priklausomyb� nuo platumos esant | ||
|
HDOP
ir VDOP priklausomyb� nuo platumos esant | ||
|
HDOP
ir VDOP priklausomyb� nuo platumos esant | ||
|
HDOP
ir VDOP priklausomyb� nuo platumos esant | ||
|
HDOP
ir VDOP priklausomyb� nuo platumos esant | ||
|
HDOP
ir VDOP priklausomyb� nuo platumos esant | ||
|
HDOP
ir VDOP priklausomyb� nuo platumos esant | ||
|
HDOP
ir VDOP priklausomyb� nuo platumos esant | ||
|
VDOP ir HDOP priklausomyb� nuo atstumo iki KTT, orlaivio t�pimo modeliavimo metu, kai priimami tik palydov� signalai | ||
|
HDOP ir VDOP priklausomyb� nuo atstumo iki KTT, orlaivio t�pimo modeliavimo metu, kai naudojami trij� orbitoje esan�i� palydov� ir vieno ant�eminio pseudolito signalai | ||
|
HDOP ir VDOP priklausomyb� nuo atstumo iki KTT, orlaivio t�pimo modeliavimo metu, kai naudojami dviej� palydov� ir dviej� ant�emini� pseudolit� signalai | ||
|
HDOP ir VDOP priklausomyb� nuo ilgumos, kai naudojami dviej� pseudolit�, i�d�styt� simetri�kai KTT, signalai |
Lenteli� s�ra�as
|
INS, GNSS sistem� ir j� sujungimo tr�kumai ir privalumai | ||
|
GPS tikslumai | ||
|
Atraminiai elipsoidai | ||
|
DOP reik�mi� �vertinimai | ||
1. �vadas
Civilin�s aviacijos vystymas atskleid�ia naujesnes ir platesnes jos pritaikymo galimybes. �iuolaikiniai l�ktuvai ir sraigtasparniai vykdo skryd�ius bet kuriuo met� ir paros laiku, skirtingomis meteorologin�mis, klimatin�mis bei geografin�mis s�lygomis. Orlaivio valdymui reikalingos specialios �inios ir technin�s priemon�s, kurias nagrin�ja oro navigacija.
Oro navigacija- tai taikomasis mokslas apie tiksl�, patikim� ir saug� orlaivio pilotavim� i� vieno �em�s pavir�iaus ta�ko � kit�, pagal nustatyt� trajektorij�. Toks orlaivio valdymas vykdomas trimat�je erdv�je. Bendruoju atveju, orlaivis skryd�io metu turi pasiekti visus mar�ruto punktus ne tik nustatyta kryptimi, bet ir nustatytame auk�tyje. Tod�l �gulai nurodomas ne tik mar�rutas, bet ir skryd�io auk�tis. Skryd�io trajektorijos s�voka oro navigacijoje suprantama kaip linija, kuri� brai�o orlaivio masi� centras. Skryd�io trajektorija paprastai nustatoma ne tik erdv�je, bet ir laiko at�vilgiu, tai reikalauja, kad mar�ruto punktai b�t� pasiekiami nustatytu laiku pagal tvarkara�t�.
Skrydis laikomas s�kmingu tik tada, kai orlaivis saugiai nusileid�ia ant kilimo-t�pimo tako (KTT). Nors did�ioji dauguma orlaivi� t�pim� atliekama vizualiai, ne retai pasitaiko situacij�, kai d�l prasto matomumo orlaivio tupdymas ne�manomas be elektronini� priemoni� �siki�imo. Savo baigiamajame darbe �Orlaivio t�pimo sistem�, pagr�st� palydovini� sistem� panaudojimu, analiz� ir tyrimas� ap�velgiau nuo pat aviacijos istorijos prad�ios egzistavusias ir �iomis dienomis egzistuojan�ias orlaivi� tupdymo sistemas.
Spartus technikos vystymasis l�m� ir tupdymo sistem� evoliucij�. Federalin� Aviacijos Administracija jau 2000 metais prad�jo ie�koti nauj� sistem� gal�sian�i� pakeisti egzistuojan�ias instrumentines tupdymo sistemas (ILS).
Vienas i� svarbiausi� pra�jusio de�imtme�io technologini� laim�jim� yra globaliosios pozicijos nustatymo sistemos diegimo pabaigimas. �is �ingsnis tur�jo svarbi� reik�m� visai aviacijos pramonei, nes naujosios GPS technologijos diktuoja ir ateities orlaivi� valdymo bei aptarnavimo ypatybes. 1994 metais Jungtini� Amerikos Valstij� Gynybos ministerija patvirtino GPS �vaig�dyno sud�t� i� 24 funkcionuojan�i� ir 8 atsargini� palydov�. Naujoji sistema u�tikrino apr�pinim� trima�iais navigaciniais duomenimis bet kuriame pasaulio ta�ke ir bet kuriuo paros metu.
Technologija nebuvo nauja, bet i�kilo daug nauj� sistemos pritaikymo sri�i�. Nors neabejojama, kad aviacijos pramonei reikia skirti pa�ias pa�angiausias id�jas ir technologijas, tokias kaip naujai atsiradusi GPS, bet laikui b�gant palydovin�s pad�ties nustatymo ir navigacijos tapo daugumos �moni� kasdienio naudojimo �rankiu. Spar�iai vystantis technologijoms ir did�jant masiniam j� panaudojamumui, akivaizdu, kad kaina nuo to tik krito. Did�jant GPS imtuv� panaudojimo civiliniame gyvenime paklausai, i�kilo nat�rali baim�, kad JAV Gynybos ministerija gali bet kada savavali�kai �i� sistem� i�jungti. Taigi pasauliniu mastu naudojamos technologijos veikimo garantas yra vienos valstyb�s karin�s institucijos rankose. Tai n�ra gera �inia civilinei aviacijai.
GPS teikiam� paslaug� didel�, nesusijusi� su aviacija vartotoj�, paklausa taip pat pad�jo pasiekti, kad Federalin� Aviacijos Administracija (FAA) neatmes galimybi� GPS sistem� pritaikyti ateities tupdymo sistemoms, pakeisian�ioms egzistuojan�ias instrumentines tupdymo iistemas (ILS). Dr�sus ir agresyvus FAA sudarytas ateities veiksm� planas (1994 metais) numat� laiko datas, kai palydovin�s sistemos visi�kai pakeis egzistuojan�ias navigacines sistemas. Plane numatyta, kad NDB ir VOR �vyturi� bus atsisakyta jau 2005 metais. Kaip matome, planai buvo per daug optimistiniai. Tuose pa�iuose dokumentuose pamin�ta ir ILS sistemos funkcionavimo pabaiga. Tai tur�t� �vykti tarp 2010 ir 2015 met�.
Egzistuojan�iomis pavien�mis palydovin�mis sistemomis � amerikie�i� GPS, Rus� GLONASS, Europos GALILEO (prad�s veikti 2008 metais), kol kas negalima remtis kaip patikimomis pad�ties nustatymo orlaiviui tupiant sistemomis. D�l jonosferos rei�kini�, oro uosto geografin�s pad�ties ir kit� prie�as�i� pad�ties koordinat�s gaunamos su nema�a paklaida. Juolab, kol kas iki galo nei�spr�stas nuolatinio kokybi�ko ry�io su reikiamu palydov� skai�iumi klausimas. Visa tai lemia b�tinyb� ie�koti sprendimo jungiant kelias, i� dalies atliekan�ias tas pa�ias funkcijas, sistemas. Amerikie�iai savos pad�ties nustatymo sistemos GPS darom� nemenk� paklaid� suma�ino iki t�pimo reikalavimus atitinkan�i� dyd�i� pasitelkdami papildomus atraminius da�nius. Ta�iau tokios sistemos veikia tik JAV teritorijoje. Sukurta GPS ir GLONASS suderinanti pad�ties nustatymo sistema teikia daugiau vil�i� jas pritaikyti tupdymo sistemose. Tokie sprendimai u�tikrina pastov� reikiam� palydov� skai�iaus matym�.
Ta�iau, kartais, ma�os paklaidos su aviacija nesusijusiam vartotojui gali reik�ti katastrofi�kai dideles orlaivio �gulai. Pavyzd�iui, orlaivio �gulai, tupdan�iai orlaiv� esant labai prastam matomumui, reikia �inoti savo pad�t� erdv�je keliolikos centimetr� tikslumu. Paprasta skirtumin� GPS (DGPS) to u�tikrinti negali. Oro uosto prieigose pastatyti keli GPS signalus siun�iantys ant�eminiai si�stuvai (pseudolitai) suteikia pakankamo tikslumo pad�ties nustatymo rezultatus, reikalingus saugiam orlaivio nut�pimui.
�io darbo tikslas ir buvo pam�ginti nustatyti palydovini� sistem� panaudojimo galimybes orlaivi� t�pimui Vilniaus tarptautiniame oro uoste (VTOU). Remiantis �inomais skai�iavimo algoritmais pam�ginti nustatyti GPS sistemos tikslum� VTOU zonoje ir koki� �tak� pad�ties nustatymo tikslumui padaryt� vienas ar keli gretimais �rengti ant�eminiai pseudolitai (angl. �Pseudo satellite�- ant�eminis palydovas).
2. T�pimo sistem� ap�valga
Paskutinis ir svarbiausias skryd�io etapas yra tupdymas. Saugumo at�vilgiu tai yra pats sud�tingiausias manevras. Sud�tingumas atsiranda d�l to, kad orlaivis pilotuojamas, kai greitis ir auk�tis kei�iasi labai greitai, be to, yra ypatingi reikalavimai orlaivio manevrams. Aviacijos istorijos prad�ioje pilotai leisdavosi bet kokiuose tam tinkamuose laukuose bet kokia, v�jo at�vilgiu palankia, kryptimi. Ta�iau, vystantis aviacijai, l�ktuvai prad�jo kilt ir leistis specialiai tam pritaikytuose oro uostuose su dirbtin�s dangos KTT. �ia kilimas ir t�pimas turi vykti grie�tai apibr�tomis kryptimis. Vis spar�iau vystantis aviacijai, atsirado b�tinyb� skraidyti net ir esant nepalankioms meteorologin�mis s�lygomis ir prastam matomumui. Pilotams vis sunkiau ir sunkiau buvo patupdyti orlaiv� be speciali� priemoni� pagalbos. Prad�jo vystytis orlaivi� nusileidimo pagalbin�s priemon�s.
Orlaivio tupdymas aerodrome vykdomas ant kilimo t�pimo tako (KTT), turin�io dvi tupdymo kryptis, kurios parenkamos atsi�velgiant � v�jo krypt� ir stiprum�. Da�niausiai orlaiv� tupdo pu�iant prie�iniam, arba prie�iniam �oniniam v�jui. Be to, kiekvienam orlaivio tipui �onin� v�jo dedamoji neturi vir�yti maksimalios reik�m�s, nurodytos jo technin�se charakteristikose.
Kryptis, atitinkanti darbo KTT kryp�iai, vadinama tupdymo kryptimi. Pasiruo�imas tupdymui vykdomas pagal nustatyt� schem� (kiekvienam aerodromui yra savo schema). Paskutin� �ios schemos dalis vadinama prie�tupdymo tiese. Ji nustatoma tokio ilgio, kad suteikt� saug� tupdym�. T�pimo sistem� ant�emin�s ir bortin�s priemon�s suteikia orlaivio pilotui (pilotams) informacij� apie jo pad�t� KTT at�vilgiu. Kiekvienas aerodromas turi bent du �enklinamuosius �vyturius A�R� (artim� �enklinam�j� radijo �vytur�) ir TR� (tolim� �enklinam�j� radijo �vytur�), o taip pat nekryptines radijo stotis ir �viesos sistemas, kuri� �viesos palengvina orlaivio tupdym�, vairavim� takeliais ir pakilim�.
2.1. Pirmosios tupdymo sistemos
Viena pirm�j� orlaivio tupdymo sistem� buvo i�rasta 1940 metais. Tai buvo t�ptin�s prototipas panaudojant dvi eiles �iburi�. �iburi� pagalba pilotas buvo atvedamas iki kilimo-t�pimo tako slenks�io. Pagalbin�s radijo priemon�s taip pat dalyvavo kuriant tupdymo sistemas. Viena pirm�j� toki� sistem� buvo pastatyta 1929 metais. Tai buvo keturi� kryp�i� radijo spindulys, kai pilotas buvo vedamas pagal Morz�s kodo signal� stiprum�. Kita tupdymo sistema i�bandyta eksperimenti�kai buvo paremta �emo da�nio radijo bang� spinduliavimu. Tokie radijo spinduliai buvo plat�jan�iai nukreipti nuo kilimo-t�pimo tako (pana�iai � raid� V).Taigi, esant dideliam atstumui nuo tako slenks�io �ie signalai b�davo atskirti vienas nuo kito, tad pilotui tereikdavo skristi tarp t� dviej� signal�. Ta�iau art�jant prie tako slenks�io abu signalai susimai�ydavo ir b�davo labai sunku atskirti kuris i� j� stipresnis, o tuo pa�iu ir nustatyti ar teisingu kursu skrendama.[8]
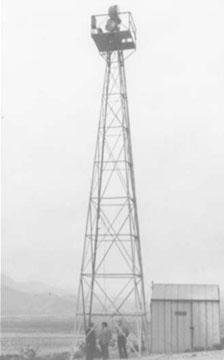
1 pav. Viena pirm�j� orlaivio tupdymo sistem�. Buvo naudojami du �viesos �vyturiai: vienas besisukantis, leid�iantis pilotui surasti KTT, kitas stacionarus, rodantis t�pimo krypt�.
2.2. Tupdymo pagal prietaisus sistema (ILS)
Did�jant skryd�i� intensyvumui, orlaiv� vis da�niau tenka tupdyti esant sud�tingoms meteorologin�ms s�lygoms. Akivaizdu, kad aerodromai turi b�ti apr�pinti pagalbin�mis t�pimo priemon�mis. Orlaiviuose yra speciali aparat�ra (ILS � instrument landing system) leid�ianti nut�pti automatiniame ir pusiau automatiniame re�ime. Toks t�pimo tipas reikalauja, kad pilotas sugeb�t� atlikti pasiruo�im� tupdyti ir nut�pti pagal prietaisus. Tam, kad palaikyti profesionalaus pasiruo�imo lyg�, pilotai nuolat treniruojasi specialiuose treniruokliuose, o tai pat realiose sud�tingose meteorologin�se s�lygose.[1][4]
Tupdymo pagal prietaisus sistemos �renginiai turi b�ti labai tiksl�s ir patikimi, kad saugiai atvest� orlaiv� iki kilimo-t�pimo tako, kai pilotas orientuojasi erdv�je tik prietais� pagalba. ILS sistema susideda i� :
Krypties radijo vedlys
Nuolyd�io radijo vedlys
Markeriniai radijo �vyturiai (gali b�ti pakeisti nekryptiniais radijo �vyturiais (NDB)
Art�jimo �viesos sistemos
ILS sutartinai klasifikuojama � skirtingas kategorijas priklausomai nuo ant�emin�s �rangos galimybi�.
2 pav. ILS skirstymas � kategorijas
ILS valdo orlaivio horizontal� ir vertikal� jud�jim�, tam, kad b�t� pasiektas kiek galima tikslesnis orlaivio priart�jimas prie kilimo-t�pimo tako u�duodant sklendimo polink�. Tik tuomet, kai visi ILS ant�eminiai �renginiai funkcionuoja, pilotas gali tiksliai priart�ti prie kilimo-t�pimo tako.
Svarbiausias ILS komponentas yra kursinis radijo vedlys, kuris yra atsakingas u� horizontalaus jud�jimo valdym�. Kursinis radijo vedlys � tai labai auk�t� da�ni� radijo si�stuvas ir anten� sistema, naudojantys t� pat� da�ni� diapazon�, kaip ir visakryptis radijo �vyturys (VOR), dirbantis 108.10 MHz - 111.95 MHz da�ni� diapazone. Kursinio radijo vedlio si�stuvo spinduliuojamas signalas susideda i� dviej� v�duokl�s formos signal�, persidengian�i� tarpusavyje ties kilimo-t�pimo tako i�ilgine linija. De�iniosios pus�s spinduliuojam� bang� amplitud� moduliuota 150 Hz signalu, o kairioji atitinkamai 90 Hz signalu.
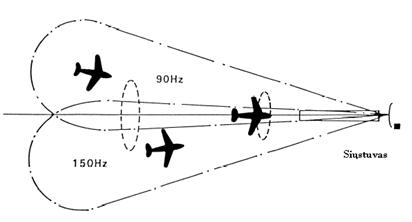
3 pav. Kursinio radijo vedlio formuojam� signal� vaizdas.
Navigacinio spindulio plotis gali kisti nuo 3� iki 6�, priimta laikyti, kad 5� yra normalus re�imas. Sistema suderinta taip. Kad ties kilimo-t�pimo tako slenks�iu krypties radijo vedlio formuojamas signalas b�t� apie 700 p�d� plo�io. Spindulio plotis tolstant nuo tako slenks�io did�ja ir esant 10 j�rmyli� atstumui, spindulio plotis siekia vien� myli�.[7][6]
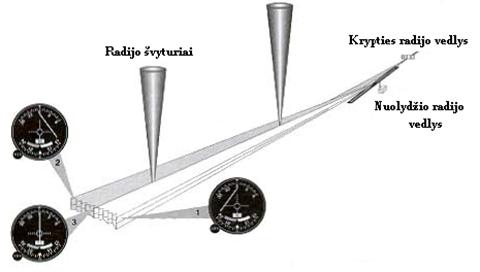
4 pav. ILS sistemos darbo principas.
Nuolyd�io radijo vedlys atsakingas u� vertikalaus jud�jimo valdym�. Nuolyd�io radijo vedlys � tai labai auk�t� da�ni� si�stuvo ir anten� sistema dirbantys 329.30 MHz - 335.00 MHz da�ni� diapazone. Si�stuvas ir anten� sistema i�d�styti ma�daug nuo 750 iki 1,250 p�d� atstumu nuo kilimo-t�pimo tako slenks�io ir nuo 400 iki 600 p�d� atstumu nuo tako a�in�s linijos. Kaip ir kursinio radijo vedlio taip ir nuolyd�io radijo vedlio si�stuvo spinduliuojamas signalas susideda i� dviej� persidengian�i� dedam�j� . Skirtingai nuo kursinio radijo vedlio, pastarosios dedamosios i�d�stytos ne �alia viena kitos, bet viena vir� kitos.
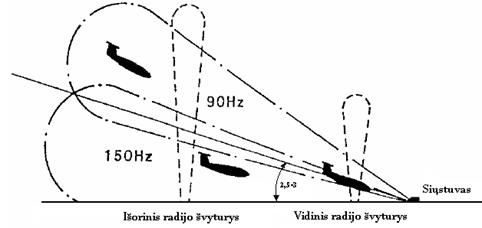
5 pav. Nuolyd�io radijo vedlio formuojam� signal� vaizdas.
Lapeli� persidengimo storis b�na nuo 1.4s iki 0.7s. Ta�iau be pagrindin�s nuolyd�io linijos gali b�ti generuojamos ir parazitines nuolyd�io linijos. Pirmoji melaginga linija bus ma�daug ties 6s, sekanti ties 9 s. Abi �ios melagingos nuolyd�io linijos bus orientuotos ta pa�ia kryptimi kaip ir pagrindin� linija. �emiau pagrindin�s nuolyd�io linijos melagingi signalai negeneruojami. Taigi, pilotas turi b�ti labai atidus, kad prastomis meteorologin�mis s�lygomis nesupainiot� nuolyd�io linij�.[1][9]
Apibendrinant galima padaryti i�vad�, kad ILS sistema turi nema�ai tr�kum�. Pagrindiniai tr�kumai b�t� �ie :
Aptarnaujamas tik vienas kilimo t�pimo takas
�emi da�niai
Didelis anten� skai�ius
Nei�vengiami atspind�iai nuo �em�s
Per ma�ai darbo kanal�
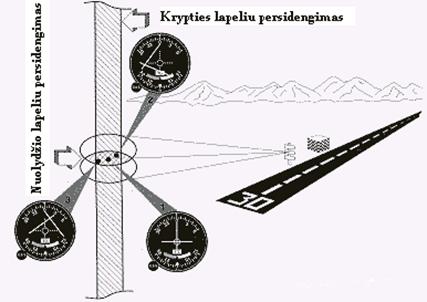
6 pav. Borto prietais� parodymai �vairiuose skryd�io re�imuose.
2.3. Mikrobangin� tupdymo sistema (MLS)
D�l didel�s ILS montavimo ir �rangos kainos, bei d�l didelio veikimo galimybi� ribotumo apie 1980 metus buvo pristatyta nauja orlaivi� tupdymo sistema � MLS (Microwave landing system). �i sistema leid�ia pilotui pa�iam pasirinkti art�jimo ir leidimosi keli� labiausiai tinkant� jo pilotuojamam orlaiviui. Taigi, MLS leid�ia pilotui leistis prie kilimo-t�pimo tako art�jant skirtingais kursais, kas nebuvo �manoma ILS sistemoje. Galimyb� priart�ti prie tako skirtingais kursais leid�ia suma�inti triuk�m� vir� gyvenam�j� rajon� ir ma�� orlaivi� pilotams i�vengti pavojing� oro s�kuri� art�jant prie tako paskui didel� orlaiv�.
Europoje MLS sistema buvo pritaikyta, kaip pamaina ILS sistemai. Ta�iau JAV MLS vystym� sustabd� dar 1994 metais, kai tik prasid�jo pirmieji eksperimentai su nauja pad�ties nustatymo sistema GPS.[1][5]
Taigi, MLS sistema atlieka �ias pagrindines funkcijas :
Art�jimo azimutas
Atgalinis azimutas
Art�jimo auk�tis
Nuotolis
Duomen� perdavimas
Kitaip negu DME �rangoje, MLS sistemoje signalai perduodami tuo pa�iu da�niu paskirstant juos laiko a�yje. Galima naudotis dviem �imtais darbo kanal�, esan�i� 5031 ir 5090.6 MHz da�ni� ruo�e. Siun�iant siaur� spinduli� pluo�t�, kuris nuolat jud�damas apima vis� steb�jimo zon�, ore esan�io orlaivio imtuvo pagalba nustatomas azimutas ir auk�tis. Tai apskai�iuojama su�inojus laiko interval� tarp spindulio atsiradimo konkre�iame sektoriuje. Pilotui MLS sistemos pateikiama informacija bus labai pana�i � ILS sistemos teikiamus duomenis. Duomen� indikacijai naudojami standartiniai kurso deviacijos indikatoriai (CDI) arba daugiafunkciniai monitoriai.
Ank��iau min�toji ILS sistema turi apribojim�, kurie neleid�ia arba smarkiai suma�ina sistemos panaudojamum� daugelyje situacij�. MLS ne tik panaikino �iuos tr�kumus, bet taip pat pateik� ir daugyb� privalum� lyginant su ILS :
Panaikinta ILS/FM transliacijos interferencijos problema
Esant blogoms oro s�lygoms sistema apr�pina reikiama informacija orlaivius esan�ius iki �60 laipsni� nuo kilimo-t�pimo tako a�in�s linijos, nuo 0.9 iki 15 laipsni� vertikalioje linijoje ir iki 20 j�rmyli� atstumu.
Galimyb� tiksliai parodyti art�jimo kurs� � ma�o ploto nusileidimo aik�teles, tokias kaip ant pastat� stog� �rengtas sraigtasparni� nusileidimo aik�teles.
Galimyb� teikti plat� pri�em�jimo kamp� diapazon�, kad b�t� galima aptarnauti STOL ir VTOL tip� orlaivius.
Abiej� r�im� (kilimas ir t�pimas) bei jud�jimo kreive suderinimas.
Galimyb� naudoti 200 kanal� � penkis kartus daugiau negu ILS sistemoje.
Pagerinta skryd�i� valdymo kokyb�, nereikalaujant didelio skryd�io plan� pakeitimo.
Pasir�pinta nepataikiusi� � kilimo-t�pimo tak� orlaivi� vedimui pasitelkiant atgalin� spindul�.
Panaikintas sistemos pritaikymo galimybi� apribojimas d�l sniego.
Ma�esni �rangos paruo�imo, remonto ir eksploatacijos �kainiai.
Art�jimo azimuto antena formuojamas signalas u�ima po 40s � abi puses nuo KTT i�ilgin�s a�ies. Signalo pri�mimas vykdomas 20 j�rmyli� atstumu nuo KTT slenks�io ir iki 20,000 p�d� auk��io. Pati antena paprastai stovi apie 1000 p�d� nuo KTT slenks�io.
7 pav. MLS sistemos formuojam� signal� vaizdas.
MLS sistemos ant�emin� stotis generuoja ir azimuto nustatymo, ir duomen� signalus (�inutes). Kiekviena i�si�sta funkcija prasideda nuo skirtingai u�koduotos dvejetain�s preambul�s, kuri nustato ne�an�i�j� faz� orlaivio imtuvui, kad dekoduot� preambul�s duomenis. Signalai yra spinduliuojami ma�o stiprinimo stacionariomis antenomis ties azimuto (Az) ir glisados (EI) stotimis.
Reikalaujamas proporcingas kamp� dekodavimas per vis� skanavimo plot� yra pasiekiamas naudojant siaur� antenos kryptingumo diagram�. Azimuto antenai kryptingumo diagramos plotis gali b�ti pasirenkamas. Visa tai daroma d�l to, kad kai orlaivis yra arti prat�stos KTT a�in�s linijos nepageidaujami atspind�iai nuo dideli� angar� ar kit� objekt� atkeliauja iki orlaivio imtuvo skirtingais negu teisingas signalas laiko momentais. Paprastai, glisados anten� kryptin�s diagramos plotis parenkamas toks, kad b�t� i�vengta signal� interferencijos nuo �em�s pavir�iaus, kai skanuojama ma�iausiu reikalaujamu kampu horizonto at�vilgiu. Ankstyvosios karin�s MLS su mechani�kai skanuojan�ia antena naudojo kintant� audio ton� , kad u��ifruoti skirtumin� skanuojan�io spindulio kamp�. Tam tikru audio da�niu moduliuoto ne�an�iojo radijo signalo amplitud�, kuri ne�� informacija apie momentin� skirtumin� kamp�, buvo detektuojama kai skanuojantis signalas atsispind�davo nuo orlaivio MLS antenos. FAA pri�m� nemoduliuoto spindulio laiko interval� tarp nuosekli� kanal� matavim� kaip veiksming� kamp� u�kodavimo metod�. Tokioje sistemoje kampo kodavimas yra laiko linijin� funkcija :
![]() (1)
(1)
kur Θ � azimutas arba kilimo vedimo kampas laipsniais, V � skanavimo greitis (paprastai tai b�na 20 laipsni�/ms), To � laiko skirtumas milisekund�mis tarp vertikalios arba horizontalios centrin�s linijos plok�tum� ir fazi� centro, ir t - laiko skirtumas milisekund�mis tarp centruot� art�jan�io ir tolstan�io nuo orlaivio kanal�. Pilnas informacij� apie azimut� perduodan�io signalo vaizdas pavaizduotas 7 paveiksle.
8 pav. MLS signalas.
Didelis skanavimo greitis ( 20000 laipsni� per sekund�) suteikia apie 40 kampin�s pad�ties duomen� pavyzd�i�, o tai yra net de�imt kart� daugiau negu b�t� reikalinga steb�ti orlaivio jud�jim�. Filtruojant �iuos auk�to da�nio signalus imtuvo i��jime galima gauti signalus su �ymiai suma��jusiomis klaidingo kamp� nustatymo tikimyb�mis.
Elektroniniu b�du skanuojama antena - tai spinduliuojan�i� element� rinkinys su nepastovaus v�linimo maitinimo tinklu (fazinis masyvas). �is masyvas ver�ia suktis anten� su faz�s post�miu, tuo pa�iu kiekvien� spinduliuojant� antenos element� apr�pindamas radijo signalu pagal i� anksto nustatyt� sek� saugojam� kompiuterio atmintyje ir nuskaitom� reikiamais laiko momentais.

9 pav. MLS antena.
10 pav. Fazin�s antenin�s gardel�s pavyzdys.
3. TSO-C129 techninio standarto reikalavimai t�pimo pagal prietaisus GPS avionikos �rangai
Palyginus visai nedaug pra�jo laiko nuo tada, kai FAA labai paskubomis pritar� proced�roms pagal kurias numatomas neprecizinis instrumentinis art�jimas t�pti pagal GPS. Technini� standart� nurodymai TSO-C129 nustato tolimesnius pagrindinius skry�i� pagal prietaisus avionikos reikalavimus. Nors i� avionikos gamintoj� buvo reikalaujama �diegti kai kurias papildomas funkcijas, ta�iau piloto ir avionikos s�saja dar nebuvo ai�kiai apibr�ta.
TSO-C129 standartas nustato reikalavimus orlaivio borto �rangai naudojan�iai GPS signalus art�jimo t�pti ir t�pimo faz�se. [14]
3.1. Pritaikomumas
Minimal�s darbo standartai. �is techninis standartas nurodo minimalius veikimo standartus, kuriuos turi atitikti orlaivio papildoma navigacin� �ranga naudojanti GPS signalus. Visa tokia �ranga skirstoma � klases :
A klas�. �ranga, kurioje sujungtos GPS jutikli� ir navigacin�s sistemos galimyb�s. Tokia �ranga turi vienytis su imtuvo automatine integralumo kontrole (RAIM).
B klas�. �ranga, kuri susideda i� GPS jutikli� sistemos teikian�ios duomenis integruotosioms navigacin�ms sistemoms ( tai yra skryd�io kontrol�s sistemai (FMS)). Visa �ranga susidedanti i� GPS jutikli� sistemos turi atitikti �io techninio standarto klas�s B reikalavimus.
C klas�. �ranga, kuri susideda i� GPS jutikli� sistemos teikian�ios duomenis integruotosioms navigacin�ms sistemoms (skryd�io kontrol�s sistema ir t.t.), kurios savo ruo�tu apr�pina autopilot� patikslintais valdymo duomenimis tam ,kad suma�int� skryd�io technines paklaidas.
3.2. Reikalavimai A klas�s �rangai
Kontrol�s naudojimas. Kontrol� turi b�ti suprojektuota taip, kad kiek galima labiau pagerinti valdymo tinkamum� ir kiek galima labiau suma�inti piloto darb�. Operacijos reikalaujan�ios dideli� piloto atminties resurs� turi b�ti kiek galima labiau minimizuotos.
Kontrol�s prieinamumas. Valdymo svirtys kurios paprastai naudojamos tik skryd�io metu turi b�ti gerai pasiekiamos ir i�d�stytos pagal j� funkcij� svarbum�.
Jutikli� s�sajos. S�sajos su kit� orlaivi� �ranga turi b�ti tokia, kad daryt� kiek galima ma�esn� �tak� kito orlaivio �rangai.
Vaizduoklio ry�kumas. �ranga turi b�ti suprojektuota taip, kad visi �renginio displ�jai ir kontrol�s mygtukai b�t� matomi ir �skaitomi esant bet kokioms kabinos ap�viestumo s�lygoms. Visi �rangos displ�jai ir kontrol�s mygtukai turi b�ti i�d�styti pagal j� svarbum�. Tai yra taip, kad svarbiausius i� j� pasiekti b�t� lengviausia.
Duomen� atnaujinimo da�nis. Navigacin�s informacijos naudojamos displ�juje atnaujinimo da�nis turi b�ti viena sekund� ar dar grei�iau.
Vietov�s ta�ko �vedimas. Vietov�s ta�ko �vedimui keliami �ie reikalavimai :
�ranga sertifikuota pagal A2 klas� turi u�tikrinti galimyb� rankiniu b�du �vesti ir atvaizduoti vietov�s ta�ko koordinates su rezoliucija nema�esne kaip 0,1 minut�s tikslumu. Jei �rangoje yra �diegta galimyb� �vesti vietov�s ta�ko koordinates kaip atstum� ir kurs� nuo kito vietov�s ta�ko �ymos, tai �vesties rezoliucija turi b�ti 0,1 j�rmyl�s arba 1 laipsnis.
�ranga sertifikuota pagal A1 klas� turi u�tikrinti galimyb� rankiniu b�du �vesti ir atvaizduoti vietov�s ta�ko koordinates su rezoliucija nema�esne kaip 0,01 minut�s tikslumu. Jei �rangoje yra �diegta galimyb� �vesti vietov�s ta�ko koordinates kaip atstum� ir kurs� nuo kito vietov�s ta�ko �ymos, tai �vesties rezoliucija turi b�ti 0,1 j�rmyl�s arba 0,1 laipsnio.
Vietov�s ta�ko �ymos saugojimas. Vietov�s ta�ko �ymos saugojimui keliami tokie reikalavimai :
�ranga turi apr�pinti tinkamais atnaujinamais navigaciniais duomenimis sudarytais i� esamos orlaivio pad�ties ilgumos ir platumos duomen� su 0,01 minut�s tikslumu. Toks tikslumas turi b�ti pasiektas tose skryd�io zonose, kur planuojamas skrydis pagal prietaisus (IFR) � tai oro uostai, j� prieigos, VOR, NDB ir t.t.
�ranga sertifikuota pagal A1 klas� turi atitikti �iuos reikalavimus :
a) Tarp �rangos navigacini� duomen� privalo b�ti ir duomenys apie visus pa�ym�tus vietov�s ta�kus ir tras� susikirtimus.
b) �ranga turi saugoti atmintyje visus pa�ymetus vietov�s ta�kus, tras� susikirtimus ir/arba navigacines priemones ir atvaizduoti jas tinkamu b�du pasirinktam art�jimo mar�rutui.
c) Vietov�s ta�kas panaudotas kaip galutin� art�jimo t�pti �ym� ar nes�kmingo art�jimo ta�kas neprecizinio art�jimo atveju tur�t� b�ti specialiai identifikuotas, kad b�t� �manoma atlikti tinkamo art�jimo re�imo operacij�.
d) Vartotojas negali pats modifikuoti duomen� susijusi� su art�jimo proced�romis.
�ranga turi tur�ti pakankam� atminties dyd�, kad b�t� galima duomenis �ra�yti, juos saugoti, pa�ym�ti kaip dal� aktyvaus skryd�io plano su minimum 9 atskirais vietov�s ta�kais.
Vietov�s ta�k� koordinat�s turi b�ti u�koduotos kaip navigaciniai duomenys, kad b�t� �manoma identifikuoti jas kaip �skrydis �alia� ir �skrydis vir��, kaip to reikalauja instrumentinio art�jimo t�pimui proced�ros SID arba STAR. Vietov�s ta�kai apibr�iantys klaiding� art�jimo ta�k� instrumentinio art�jimo t�pimui proced�rose turi b�ti u�koduotas kaip �skrydis vir��.
Art�jimo re�imo pasirinkimas
Neprecizinio art�jimo �vykdymui, kai art�jimas numatytas skryd�io plane A1 klas�s �ranga turi garantuoti :
a) Esant 30 j�rmyli� radialiniam atstumui nuo numatyto atvykimui kilimo t�pimo tako, borto �ranga nedelsiant turi persijungti terminalo veikimo re�im�.
b) �ranga turi u�tikrinti tiek automatin� tiek rankin� art�jim� t�pti. Jei art�jimas numatytas rankiniu b�du, �ranga turi �jungti �sp�jam�j� signal� esant 30 j�rmyli� atstumui nuo atvykimo ta�ko. Po �io persp�jan�io signalo visos priemon�s bus pajungtos atlikti art�jim� t�pti valdant orlaivio pilotui. Kaip priedas prie �io persp�jan�io signalo turi b�ti atliktas kitas persp�jimas tinkamomis priemon�mis apie b�tunyb� rankiniu b�du nustatyti barometro sl�g�. Jei art�jimas t�pti atliekamas automatiniu re�imu �ranga turi aktyvuoti �sp�jam�j� signal� likus 3 j�rmyl�ms iki ribos su paskutiniu art�jimo punktu. Automatinis art�jimas t�pti netur�t� b�ti �jungiamas likus daugiau negu 30 j�rmyli� iki paskirties ta�ko. Taip pat turi b�ti u�tikrinta tam tikra art�jimo aktyvavimo indikacija. Kaip priedas prie �io persp�jan�io signalo turi b�ti atliktas kitas persp�jimas tinkamomis priemon�mis apie b�tunyb� rankiniu b�du nustatyti barometro sl�g�.
c) Likus 3 j�rmyl�ms iki paskutinio art�jimo punkto �ranga automati�kai parodys prane�im� ir pasikeis displ�jaus jautrumas. Jei art�jimo t�pti funkcija nebuvo �jungta apie tai bus pakartotinai prane�ta (tai lie�ia tik art�jim� rankiniu b�du).
d) Likus 2 j�rmyl�ms iki paskutinio art�jimo punkto ir jei art�jimo t�pti funkcija buvo aktyvuota, �ranga automati�kai tikrins, kad palydov� i�sid�stymo geometrija b�t� tinkama per vis� art�jimo t�pti period�.
Tam, kad visas priemones perjungti � kit� neart�jimo re�im� turi pakakti vieno mygtuko paspaudimo.
Gedimo/b�kl�s identifikacija. �ranga privalo indikuoti �iuos duomenis nepriklausomai nuo operatoriaus veiksm� :
Pavojaus v�liav�l� navigaciniame displ�juje :
a)Reikalingos energijos navigacin�ms funkcijoms atlikti nebuvimas
b) Bet kokie �rangos gedimai ar trikd�iai �takojantys navigacini� funkcij� atlikim�
c)Navigacini� funkcij� praradimas
Papildomi navigaciniai duomenys (tokie kaip atstumas iki vietov�s ta�ko,laikas lik�s iki vietov�s ta�ko, greitis ir t.t.) netur�t� b�ti rodomi arba turi b�ti papildomai persp�jama tai atvejais, kai n�ra pakankamai informacijos i�vardintiems duomenims apskai�iuoti.
Reikalavimai �einan�iam � auk�timat� sl�giui. Jeigu tupdymui skirtas �renginys naudojantis GPS signalus jungiamas su auk�tima�iu, jam keliami tokie reikalavimai :
�ranga kaip sudedam�j� dal� turi tur�ti apr�pinim� automatiniu duomen� apie sl�g� tam tikrame auk�tyje �vedimu. Auk�tis pagal sl�g� turi b�ti lyginamas ir pataisomas remiantis duomenimis gautais i� palydov�. Visi tokie �renginiai turi b�ti suprojektuoti taip, kad automati�kai gaut� duomenis bent jau apie sl�gio poky�ius. Pasirinktinai gamintojai gali suprojektuoti sistem�, kuri automati�kai priimin�s duomenis apie sl�g�, pakoreguot� taip, kad tikt� borto auk�tima�io nustatymui. Skrendant auk��iau nei 18 000 p�d� sl�gis turi b�ti kalibruojamas atsi�velgiant � GPS parodymus. Sukalibruota sl�gio vert� turi b�ti nustatoma taip : i� esan�io auk��io sl�gio vert�s atimamas sl�gi� skirtumas tarp auk��io sl�gio ir apytiksliai GPS pagalba nustatytos vertikalios orlaivio pad�ties dabartiniu metu. Orlaiviui esant �emiau negu 18 000 p�d� �ranga esant� tam tikrame auk�tyje sl�g� tur�t� pakoreguoti naudojant skirtum� tarp WGS-84 elipsoido auk��io ir vidutinio j�ros lygio auk��io tam tikrame �em�s pavir�iaus ta�ke.
Yra naudojami du skirtingi GPS auk��io skai�iavimo sprendimo patikslinimo b�dai. Vienas i� j� yra pasinaudoti tam tikro auk��io sl�gio duomenimis patikslintais GPS duomenimis. Kitas metodas yra auk��io duomen� pakoregavimas naudojant skirtum� tarp WGS-84 elipsoido auk��io ir vidutinio j�ros lygio auk��io tam tikrame �em�s pavir�iaus ta�ke.
3.3. Reikalavimai B klas�s �rangai
GPS jutikliai sertifikuoti pagal B klas�s reikalavimus turi atitikti visus �emiau i�vardintus reikalavimus.
Kontrol�s naudojimas. Kontrol� turi b�ti suprojektuota taip, kad kiek galima labiau pagerinti valdymo tinkamum� ir kiek galima labiau suma�inti piloto darb�. Operacijos reikalaujan�ios dideli� piloto atminties resurs� turi b�ti kiek galima labiau minimizuotos.
Jutikli� s�sajos. S�sajos su kit� orlaivi� �ranga turi b�ti tokia, kad daryt� kiek galima ma�esn� �tak� kito orlaivio �rangai.
Duomen� atnaujinimo da�nis. Navigacin�s informacijos naudojamos displ�juje atnaujinimo da�nis turi b�ti viena sekund� ar dar grei�iau.
RAIM �gyvendinimas. Bet kuris algoritmas patikrinantis GPS matavimo pozicijos integralum� ir pakoreguojantis barometrini� auk��io matavimo prietais� parodymus vertinamas kaip RAIM algoritmas. Algoritmas naudojantis papildom� informacij� (kit� jutikli� informacij�) tam, kad patikrint� GPS matavim� integralum� taip pat priimtinas kaip RAIM ekvivalentas.
RAIM funkcija turi b�ti prieinama visame pasaulyje, ma�iausiai 95 % atvej�. RAIM ekvivalent� prieinamumas taip pat turi siekti bent 95 %.
�ranga turi pati automati�kai pasirinkti RAIM integralum� priklausomai nuo skryd�io faz�s.
GPS �ranga privalo pati savaranki�kai detektuoti pseudo atstumo �ingsni� reik�mi� klaidas didesnes negu 1000 metr�, taip pat reik�mes, kurios gautos po ry�io su palydomu praradimo ilgesniam nei 10 sekund�i� periodui. Pseudo atstumo �ingsnis apibr�iamas kaip staigus i�matuoto atstumo iki palydovo pokytis. Jeigu pseudo atstumo �ingsnis u�fiksuotas palydovui, kurio signalai netur�t� b�ti naudojami navigaciniame algoritme, jo integralumas gali b�ti patikrintas RAIM pagalba. �rangos gamintojams paliekama laisv� patiems pasirinkti tinkam� metod� apskai�iuoti pseudo atstum� ar jo �ingsn�. Ta�iau, gamintojai privalo tur�ti omeny palydov� jud�jimo grei�ius ir orlaivio dinamikos ypatumus.
3.4. Reikalavimai C klas�s �rangai
Integruotosios navigacin�s sistemos, kurios naudojasi GPS signal� teikiama informacija, turi tenkinti �iuos reikalavimus : GPS jutikliai sertifikuoti pagal C klas�s reikalavimus ir veikiantys kartu su integruotomis navigacin�mis sistemomis turi atitikti visus �emiau i�vardintus reikalavimus.
Kontrol�s naudojimas. Kontrol� turi b�ti suprojektuota taip, kad kiek galima labiau pagerinti valdymo tinkamum� ir kiek galima labiau suma�inti piloto darb�. Operacijos reikalaujan�ios dideli� piloto atminties resurs� turi b�ti kiek galima labiau minimizuotos.
Kontrol�s prieinamumas. Valdymo svirtys kurios paprastai naudojamos tik skryd�io metu turi b�ti gerai pasiekiamos ir i�d�stytos pagal j� funkcij� svarbum�.
Jutikli� s�sajos. S�sajos su kit� orlaivi� �ranga turi b�ti tokia, kad daryt� kiek galima ma�esn� �tak� kito orlaivio �rangai.
Duomen� atnaujinimo da�nis. Navigacin�s informacijos naudojamos displ�juje atnaujinimo da�nis turi b�ti viena sekund� ar dar grei�iau.
RAIM �gyvendinimas. Bet kuris algoritmas patikrinantis GPS matavimo pozicijos integralum� ir pakoreguojantis barometrini� auk��io matavimo prietais� parodymus vertinamas kaip RAIM algoritmas. Algoritmas naudojantis papildom� informacij� (kit� jutikli� informacij�) tam, kad patikrint� GPS matavim� integralum� taip pat priimtinas kaip RAIM ekvivalentas.
RAIM funkcija turi b�ti prieinama visame pasaulyje, ma�iausiai 95 % atvej�. RAIM ekvivalent� prieinamumas taip pat turi siekti bent 95 %.
�ranga turi pati automati�kai pasirinkti RAIM integralum� priklausomai nuo skryd�io faz�s.
GPS �ranga privalo pati savaranki�kai detektuoti pseudo atstumo �ingsni� reik�mi� klaidas didesnes negu 1000 metr�, taip pat reik�mes, kurios gautos po ry�io su palydomu praradimo ilgesniam nei 10 sekund�i� periodui. Pseudo atstumo �ingsnis apibr�iamas kaip staigus i�matuoto atstumo iki palydovo pokytis. Jeigu pseudo atstumo �ingsnis u�fiksuotas palydovui, kurio signalai netur�t� b�ti naudojami navigaciniame algoritme, jo integralumas gali b�ti patikrintas RAIM pagalba. �rangos gamintojams paliekama laisv� patiems pasirinkti tinkam� metod� apskai�iuoti pseudo atstum� ar jo �ingsn�. Ta�iau, gamintojai privalo tur�ti omeny palydov� jud�jimo grei�ius ir orlaivio dinamikos ypatumus.
�ranga sertifikuota pagal C klas�s reikalavimus privalo atlikti RAIM funkcij� prognoz�. �i funkcija privalo automati�kai atlikin�ti RAIM pasiekiamumo prognoz� kai pasiekiamas paskutinis art�jimo t�pti ta�kas. Esant reikalui �i funkcija turi apr�pinti pilot� duomenimis apie tai, ar pasirinktame skryd�io etape bus pasiekiama RAIM funkcija.
Palydov� pasirinkimas. Visi parametrai naudojami palydov� �vaig�dyno pasirinkimui privalo b�ti atnaujinami kas 5 minutes kiekvienam palydovui, kurio duomenys naudojami pozicijos nustatymo algoritme. �ranga privalo atmesti palydovo signal�, jei
a) B�kl�s �odis prane�a, kad palydovas techni�kai netvarkingas
b) Navigaciniai duomenys susideda tik i� vienod� simboli�
Reikalavimai antenai. Gamintojas privalo garantuoti, kad antena ir visi jei priskiriami elektroniniai �renginiai yra tinkamai patikrinti atitinka keliamus reikalavimus. Antenos darbo reikalavimuose privalo b�ti nustatytas minimalus ir maksimalus antenos stiprinimas. Da�nio stabilumas, maitinimo reikalavimai, triuk�m� diagrama ir kt. Gamintojas privalo pateikti duomenis apie leistin� maksimal� orlaivio jud�jimo greit�, kuriam esant antena dar gali funkcionuoti. Gamintojas taip pat privalo nurodyti su kokia GPS �ranga j� gaminama antena yra suderinama. Visi anks�iau i�d�styti reikalavimai turi b�ti nurodyti gamintojo instrukcijoje pridedamoje prie antenos.
�ym�jimas. Specialiai pa�ym�tos turi b�ti visos svarbiausios �rangos detal�s. Kiekvienas atskiras �rangos komponentas turi tur�ti speciali� �ym�, kurioje b�t� nurodoma bent jau �rangos gamintojas ir TSO standarto numeris. [14]
4. Palydovin�s tupdymo sistemos
Netgi dar prie� Jungtin�ms Amerikos Valstijoms 1993 metais paskelbiant apie GPS veikim� buvo stengiamasi �i� sistem� pritaikyti preciziniam orlaivi� art�jimui prie KTT ir leidimuisi. V�liau prie �i� m�ginim� prisijung� ir rusi�ka sistema GLONASS.[1]
Bazinis GPS be diferencini� patais� negal�jo pasitarnauti preciziniam art�jimui prie tako ir leidimuisi d�l �i� prie�as�i� :
Tikslumas. Nominali vertikali paklaida siekia 150 metr�. Taigi, palyginus su reikalaujamais �8 metrais pirmai ILS kategorijai, �4 metrai antrai kategorijai ir �1,3 metro tre�iai kategorijai gauname �velniai tariant nelabai patenkinamus rezultatus.
Vientisumas. GPS konstrukcija stokoja kontrol�s sistemos, kuri gal�t� pasir�pinti savalaikiais �sp�jimais apie valdymo duomen� klaidas per de�imt sekund�i� pirmai kategorijai, arba per ma�iau negu dvi sekundes tre�iai kategorijai.
Prieinamumas. Matom� palydov� skai�ius tam tikrais laiko momentais ne visada gali b�ti vienodas.
Anks�iau pamin�ti apribojimai nepreciziniam ir preciziniam pirmos kategorijos art�jimui prie tako buvo suma�inti FAA pagalba pasitelkiant WAAS (Wide Area Augmentation System) technologij�, kuri buvo prad�ta vystyti dar 1996 metais. WAAS gali b�ti statomos prie kilimo-t�pimo tak� kaip papildomos vietinio diferencinio GPS ( LDGPS ) stotys. WAAS susideda i� ma�daug 25 referencini� sto�i� i�d�styt� visoje JAV teritorijoje. �ios stotys kontroliuoja GPS palydov� duomenis. Dvi pagrindin�s stotys renka duomenis i� referencini� sto�i� ir generuoja GPS korekcin� signal�. �is korekcinis signalas atskaito GPS palydovo orbitos ir laiko paklaidas, taip pat signal� v�linim� d�l jonosferos trukd�i�. Pakoreguoti diferenciniai signalai v�liau persiun�iami per vien� i� dviej� geostacionari� palydov�. Perdirbta informacija yra suderinama su bazinio GPS signalo strukt�ra, tai rei�kia kad bet kuris pritaikytas WAAS technologijai GPS imtuvas gali apdoroti koreguot� informacij�.
Ta�iau �iuo metu WAAS palydovai prieinami tik �iaur�s Amerikoje. Netgi Piet� Amerikoje n�ra referencini� sto�i�.[2][9]
11 pav. Bazinio GPS ir GPS su WAAS funkcija tikslumo palyginimas
Taigi, net tur�damas WAAS technologijai pritaikyt� GPS imtuv� vartotojas negaus korekcinio signalo ir sistemos tikslumas nebus pagerintas. Net ir kai kuriems amerikie�i� vartotojams i�kyla sunkum�, nes �iauriau nuo ekvatoriaus gyvenantiems vartotojams b�na sunku susisiekti su geostacionariu palydovu d�l kalnuot� vietovi� ar kit� reljefo ypatum�. WAAS signal� pri�mimas idealus lygumoms ir j�roje esantiems vartotojams. D�l �i� svarbi� prie�as�i� WAAS technologija netaikoma aviacijoje. [3]
Tam, kad palaikyti antrosios ir tre�iosios kategorij� veikim�, papildomi tikslumo ir kontroliuojan�ios �rangos persijungimo laikas gali b�ti pasiekti � pagalb� pasitelkiant diferencines GPS stotis ir didelio integralumo ant�emin�, �rengiam� netoli KTT , sistem� vadinam� lokalia diferencine GPS (Local Differencial GPS). Panaudojant LDGPS galima panaikinti beveik visas klaidas susijusias su palydovo efemeride, laiko nusimu�imu, pasiekiamumu, jonosferos �taka, paliekant tik klaidas susijusias su imtuvo triuk�mais. Tako referencin� stotis (su tinkama kontrol�s aparat�ra) gali pateikti sistemos �sp�jimus per reikalaujam� keli� sekund�i� laikotarp�. Papildomas tinkamumo didinimas gali b�ti atliktas su WAAS pagalba, precizinio laiko standartu orlaivyje, pseudolitais, i�d�stytais ties orlaivio art�jimo keliu.
1996 metais GPS imtuvai gal�jo pariimti iki de�imties sprendim� per sekund�, ko pilnai pakako keletui skryd�i� vienu metu. SPS kodo sprendinio tikslumas be jokio papildymo buvo pakankamas nepreciziniam priart�jimui. Kodo i��ifravimas buvo pagerintas integruojant � sistem� ne�an�iojo da�nio Doplerio post�mio nustatym�, kad b�t� galima gauti grei�io komponent� lyginamiesiems pozicijos matavimams ir panaikinanti v�linimo efekt�. Pozicijos nustatymui panaudojant kinematine technologij� gaunami dar ma�esni triuk�mai. [10]
Dviej� sekund�i� duomen� v�linimas yra nepaken�iamas tupdymo sistemoms pagal tre�i� kategorij�. Reikalavimas gauti referencin� signal� i� ant�emin�s stoties ir skai�iavimai atliekami orlaivyje gali u�laikyti signal� net kelioms sekund�ms. O tas savo ruo�tu tur�s �takos ir pozicijos nustatymo sprendimo pri�mimo laikui. Taigi, ir pilotas apie esam� pozicij� su�inos tik po keli� sekund�i�, kas neretai b�na jau per v�lu (turint omen� didel� �iuolaikini� orlaivi� jud�jimo greit�). Tokio tipo u�laikymai gali b�ti panaikinti ant�emini� skai�iavim�, borto skai�iavim� d�ka, taip pat modifikuojant imtuvo konstrukcij� (pavyzd�iui, kol trunka v�linimas gali b�ti apskai�iuojamas ne�an�iojo da�nio Doplerio poslinkis). V�linim� galima suma�inti ir mai�ant palydov� ir inercini� sistem� duomenis. B�senos statistinis �vertinimas ( Kalmano filtras) gali derinti senus pozicijos duomenis su grei�i� kitimo duomenimis tam ,kad gauti tikslius esamos orlaivio pozicijos duomenis.
Ma�as signalo priimamo i� palydovo galios lygis paver�ia palydovin� orlaivi� tupdymo sistem� labiau pa�eid�iam� d�l radijo signal� interferencijos. 1996 �ios problemos buvo labai intensyviai tyrin�jamos.
Palydovo signalo atspind�iai nuo �em�s pavir�iaus ir kit� objekt� yra pakankamai ma�i, ta�iau diferencin�s stoties siun�iam� signal� atspind�iai yra kur kas didesni. Taigi, �rangos pastatymo vietos i�rinkimo kriterijai yra analogi�ki ILS ir MLS sistemoms.[11]
Daugelis palydovin�mis sistemomis pagr�st� bandym� program� parod�, kad vien tik DGPS technologija negali u�tikrinti reikiamo pozicionavimo tikslumo orlaiviui leid�iantis. Siekiant patenkinti keliamus reikalavimus b�tina naudoti kombinuotas palydovines sistemas ir/arba sujungti jas su inercin�mis navigacin�mis sistemomis (INS). Taigi, atsirado b�tinumas vystyti nauj�, ma�os kainos, integruot� DGPS/DGLONASS/INS navigacin� sistem�, kuri tenkint� didelius bendrosios aviacijos reikalavimus ir atitikt� visus priimtus standartus. Integruota navigacijos ir tupdymo sistema pirmiausiai buvo projektuojama taip, kad atitikt� skryd�io pagal instrumentus s�lygas. Vienas i� pagrindini� �ios sistemos reikalavim� buvo gauti ma�esne negu pus�s metro vertikali�j� Navigacinio Daviklio Paklaid� (NSE � Navigation Sensor Error). NSI tai skirtumas tarp realaus orlaivio masi� centro ir jutikli� apskai�iuotos pozicijos. Norint pasiekti tok� tikslum� inercin� navigacin� sistema buvo susieta su DGNSS jutikliais, barometriniu auk��iama�iu ir tikrojo grei�io matuokliu.
Nors DGNSS tikslumas yra pakankamai geras, �i sistema stokoja pozicijos nustatymo t�stinumo d�l palydomo nepasiekiamumo tam tikrais laiko momentais arba d�l palydovo gedimo. Be to, DGNSS pozicijos nustatymo tikslumas ma��ja d�l pagrei�i� ir gili� pos�ki�. Siekiant suma�inti �iuos tr�kumus sistemos signalai naudojami ir inercin�je navigacijos sistemoje.�ios dvi sitemos naudojamos kartu viena kit� papildo.[2][15]
1 lentel�. INS, GNSS sistem� ir j� sujungimo tr�kumai ir privalumai.
|
INS |
GNSS |
Sujungta |
|
|
Trumpos trukm�s tikslumas |
Geras |
Prastas |
Puikus |
|
Ilgos trukm�s tikslumas |
Blogas |
Puikus |
Puikus |
|
Pozicijos duomen� praradimas |
N�ra |
Pasl�ptas palydovas |
N�ra |
|
Atnaujinimo greitis |
Auk�tas |
Vidutinis |
Auk�tas |
Tokios, jungtin�s, sistemos blokin� schema pavaizduota 11 paveiksl�lyje. Sistema susideda i� trij� pagrindini� dali� :
Pakilimo sistema (GNSS imtuvas, duomen� perdavimo radijo da�niais imtuvas, navigacinis procesorius, duomen� laikmenos ir j� atvaizdavimo sistemos).
Ant�emin� �ranga (GNSS referencin�s stotys, radijo si�stuvai).
Patvirtinimo referencin� sistema ( L1/L2 GPS imtuvas suderintas su INS).
Be to, sistema dar turi patenkinti kelet� reikalavim� ir paskir�i� :
Atitikti visus saugaus skryd�io standartus
B�ti kiek �manoma lankstesne sistema (s�sajos)
�galinti paprasta pritaikym� ir modifikacij�
Protingas duomen� apdorojimas ir valdymas
Buvo nuspr�sta kilimo sistem� i�skirstyti � FOG-AHRS su integruotu navigaciniu procesorium, i�orin� GPS/GLONASS imtuv� ir i�orin� pagrindini� duomen� laikmen�, kad b�t� galima �ra�in�ti atskir� dali� duomenis ir valdyti ILS indikatori�. Ant�emin� GPS/GLONASS referencin� stotis buvo suprojektuota taip, kad veikt� dviej� sekcij� re�imu. Pirmoji apskai�iuoja pagrindin� GPS/GLONASS sistemos diferencines pataisas, o antroji � tikrina �i� paklaid� patikimum� dar prie� jas i�siun�iant.
12 pav. Kombinuotos navigacijos ir tupdymo sistemos blokin� schema.
4.1. Automatinis leidimasis �prastiniais metodais ir pasitelkiant GPS
Kaip jau buvo pamin�ta �vade, nebloga i�eitis palydovin�mis sistemomis pagr�stoms orlaivi� tupdymo sistemoms yra integruotosios navigacin�s sistemos tokios kaip GPS+GLONASS arba GPS+Loran-C. Prie toki� sprendim� prived� b�tinyb� u�tikrinti vartotoj� reikiamu tikslumu tokiam svarbiam skryd�io etape kaip t�pimas.
Daugelyje �prastini� automatini� orlaivio tupdymo sistem� naudojama instrumentin� orlaivi� tupdymo sistema arba mikrobangin� orlaivi� tupdymo sistema (ILS ir MLS). �ios sistemos suteikia orlaivio autopilotui informacij� apie kampines nuokrypas nuo norimo kurso, kuris i� esm�s atitinka nustatytas vertikali� ir horizontali� pad�tis. Bazin�s ILS gali patenkinti tik neprecizinio art�jimo ir t�pimo pagal pirma kategorij� FAA keliamus reikalavimus. Orlaiviai naudojantys MLS arba patobulint� ILS gali leistis pagal tre�ios kategorijos reikalaujam� tikslum�. Tokiuose autopilotuose greitis paprastai yra skai�iuojamas diferencijuojant pozicij� arba integruojant pagrei�i� reik�mes gaunamas i� inercin�s matavimo sistemos. Pagrindiniai toki� sistem� tr�kumai yra labai didel�s vartotoj� �rangos kainos ir priklausomyb� nuo dar brangesn�s ant�emin�s �rangos.[12]
Skirtingai nuo kit� navigacini� priemoni� GPS imtuvai tiesiogiai dideliu tikslumu matuoja trimat� greit� (tokiose sistemose kaip DGPS ir CDGPS pasiekiami rezultatai geresni negu 5cm/s). Tiesioginis tikrojo ant�eminio grei�io matavimas praver�ia ne vien orlaiviui tupiant, bet tos �inios labai praver�ia ir esant v�jo �uoliams. Didelis GPS privalumas yra tas, kad viena elektronin� sistema gali i�matuoti objekto pad�t� trimat�je erdv�je , jo jud�jimo greit� ir auk�t� visose skryd�io faz�se, �skaitant ir precizin� t�pim�. Tradici�kai, visi�kas automatinis leidimasis reikalauja inercinio navigatoriaus.
�iame skyriuje aptarsime automatinio tupdymo sistem� ir imituosime j� orlaiviui, naudojan�iam diskretinio laiko valdikl�, veikiant� nuo GPS jutikli�. Tokios tupdymo sistemos imitavime naudojami keturi alternatyv�s jutikli� rinkiniai :
Standartinis GPS;
Standartinis GPS papildytas radijo auk�tima�io duomenimis;
Diferencin� GPS be radijo auk�tima�io papildymo ir
Ne�an�ios faz�s GPS (CDGPS).
Blokin� tokios tupdymo sistemos schema pavaizduota 1 paveiksl�lyje. Paveiksl�lyje parodytos auk�tima�io ir diferencini� patais� pri�mimo priemon�s n�ra b�tinos.
Autopiloto valdiklis �gyvendinamas dvejais b�dais. Pirmuoju atveju, tai tiesiog standartinis linijinis kvadratinis Gauso reguliatorius, kurio pagalba tiesiogiai �vertinami v�jo trukd�iai. Antruoju atveju naudojamas integrinio valdymo d�snis, kurio pagalba negalima tiesiogiai �vertinti v�jo �tak�, ta�iau jo pagalba suma�inamos i��jimo paklaidos.[13] [2]
Tokios automatizuotos tupdymo sistemos bandymai parod�, kad esant normalioms oro s�lygoms ir �prastinei palydov� �vaig�dyno i�sid�stymo konfig�racijai, GPS ir DGPS labai lengvai gali atitikti FAA keliamus reikalavimus nepreciziniam art�jimui t�pti. Papildant GPS sistem� radijo auk�tima�io duomenimis gauti rezultatai atitinka tikslumo reikalavimus keliamus pirmos kategorijos tupdymo sistemoms. O pasinaudojus ne�an�iosios faz�s matavimais CDGPS pagalba galima pasiekti tikslum� reikaling� tre�ios kategorijos tupdymams (nepasitelkiant � pagalb� inercini� navigacijos sistem�).[19]
13 pav. GPS automatinio tupdymo sistemos blokin� schema
4.2. Art�jimo t�pti proced�ros
Da�niausiai �iais laikais naudojama tupdymo sistema i�lieka ILS. Visai neseniai spar�iausiai vystoma sistema buvo MLS, kuri turi pakankamai daug privalum� palyginus su ILS. Smulkesnius �i� sistem� skirtumus ir MLS privalumus aptariau pirmojo tiriamojo darbo ataskaitoje. Abi sistemos suteikia orlaiviui reikaling� leidimuisi keli� su i� anksto nustatytomis nuolyd�io ir kurso reik�m�mis. D�l toki� sistem� kampini� matavim� ypatum�, vietos nustatymo klaidos proporcingai did�ja tolstant nuo ant�eminio si�stuvo. Labai da�nai �ios sistemos yra papildomos inercin�mis navigacijos sistemomis, tokiu b�du suteikiant daugiau informacijos apie posvir�, orlaivio pad�t� erdv�je ir jo jud�jimo greit�. Orlaivis valdomas taip, kad nei�eit� i� nurodyto kelio rib�, nevir�yt� grei�io arba neb�t� per l�tas skrydis reikalingas pasiekti ir nusileisti numatytoje vietoje.
Orlaivio t�pimo proced�ra susideda i� keli� sudedam�j� dali� :
Pirminis art�jimas.
�ioje faz�je orlaivis i� savo skryd�io auk��io nusileid�ia iki reikiamo 500-1500 metr� auk��io, kai nuotolis iki KTT yra apie 40 kilometr�. Po �io manevro orlaivis pereina � stabilaus auk��io palaikymo faz�. Skrendant tokiu re�imo orlaivio aparat�ra paj�gi priimti ILS/MLS signalus ir pagal juos sekti iki KTT prad�ios.
Nuo�ulnus sklendimas.
Kai pirminio art�jimo trajektorija susikerta su tupdymo sistemos spinduliuojam� signal� trajektorija, orlaivis pereina i nuo�ulnaus sklendimo faz�. Skrendant �iuo re�imu palaikomas stabilus 2-3 m/s leidimosi greitis. Nuo�ulnaus sklendimo metu orlaivio autopilotas stengiasi kiek galima ma�iau nukrypti nuo tupdymo sistemos nustatyto kurso.
T�pimas.
�ioje faz�je leidimosi greitis tur�t� b�ti apie 0,5 m/s. Autopilotas kreipia orlaiv� pagal asimptot� link pasirinkto ta�ko esan�io vir� KTT.
4.3. Art�jimas t�pti pagal GPS
GPS sistema yra nepriklausomas pozicijos, grei�io, orlaivio pad�ties erdv�je jutiklis, kuris funkcionuoja be joki� ant�emini� si�stuv� pagalbos (turima omeny tai ,kad n�ra jokio ant�emin�s �rangos formuojamo spindulio pagal kur� orientuojasi autopilotas). Skirtingai nuo ILS ar MLS bet koks tinkamas leidimuisi kelias gali b�ti sukurtas GPS sistemos pagalba, te�inant KTT koordinates ir i�sid�stym�. Vientis�j� �vyturi� panaudojimas kartu su CDGPS kalibruoja palydov� nevienareik�mi�kum� ir formuoja papildom� ne�an�iosios faz�s informacij�. Tokie paprasti ir nebrang�s prietaisai taip pat padidina sistemos integralum� : skai�iavimai parod�, kad tokios sistemos panaudojimas garantuoja vien� klaiding� nusileidim� i� milijardo s�kming� atvej�. Net jei ir orlaivis yra priverstas skristi per apylinkes kur �rengti min�tieji si�stuvai, kad patikimai ir u�tikrintai pasiekt� centimetrin� tikslum�, tie si�stuvai netrukdo orlaiviui jud�ti kitu art�jimo t�pti keliu.
4.4. GPS matavimai
Pagrindinis faktorius � kur� atsi�velgiame projektuojant automatines tupdymo sistemas yra GPS sistemos paklaidos ir triuk�mai. Paklaid� dydis gali keistis priklausomai nuo �rangos gamintojo. [2]
2 lentel�. GPS tikslumai
|
Sistema |
GDOP |
UERE |
UERRE |
Hor.pozicijos klaida |
Vert. Pozicijos klaida |
Hor. Grei�io klaida |
Vert. Grei�io klaida |
|||||||
|
HDOP |
VDOP |
Bias |
Bias |
Bias |
Bias |
Bias |
Bias | |||||||
|
GPS (be SA) | ||||||||||||||
|
GPS+auk�t. |
N/A | |||||||||||||
|
DGPS | ||||||||||||||
|
CDGPS | ||||||||||||||
Lentel�je pavaizduot� sutrumpinim� reik�m�s :
4.5. T�pimas tik su GPS
Automatinis orlaivio tupdymas naudojantis nediferencine GPS galimas tik su esan�iomis vertikaliomis 10-15 metr� ir horizontaliomis 7-8 metr� paklaidomis. Taigi, seka i�vada, kad skrydis pasinaudojant tik GPS pilnai atitinka FAA keliamus neprecizinio art�jimo t�pti reikalavimus. D�l dideli� vertikalios pozicijos nustatymo paklaid� preciziniam leidimuisi sistema nenaudotina.
4. 6. T�pimas su GPS ir auk�tima�iu
Tikslaus nusileidimo specifika yra ta, kad reikalaujama didesni� vertikalios pad�ties nustatymo tikslum�, o ne horiontalios. Deja, GPS sistemoje kol kas horizontal�s matavimai yra kur kas tikslesni u� vertikalius matavimus. Visai tai yra d�l palydovo geometrijos. Ta�iau, yra vienas neblogas b�das i�spr�sti �i� GPS problem� � � pagalb� pasitelkti kur kas geresnius vertikali� matavim� rezultatus teikiant� radijo auk�timat�. Nors radijo auk�timatis ir nepagerina horizontali�j� matavim� tikslumo, ta�iau jo pagalba vertikali�j� matavimo paklaidos suma�inamos iki 1 metro. Taigi, tokia kombinuota sistema pilnai atitinka FAA pirmai art�jimo t�pti kategorijai keliamus reikalavimus. Gaunami ypatingai geri vertikalaus matavimo tikslumai palyginus su tai kuriuos gautume tik GPS pagalba.
4.7. T�pimas su diferencine GPS
Kitas pakankamai patikimas b�das suma�inti GPS paklaidas yra pasinaudoti diferencin�mis pataisomis siun�iamomis i� netoliese esan�ios diferencin�s GPS stoties. Tokia sistema pagerina ir vertikalaus matavimo, ir horizontalaus matavimo tikslumus, tuo pa�iu pateikia ir gana tikslius objekto jud�jimo grei�io duomenis. Svarbu pamin�ti, kad DGPS panaudojimas tuo pa�iu pagerina ir skryd�io technines paklaidas. Yra �inoma, kad diferencini� patais� pagalba GPS paklaidos suma�inamos beveik per pus�. Taigi, � pagalb� tupiant pasitelkiant vien tik DGPS gauname sistem�, kuri pilnai atitinka FAA keliamiems pirmos kategorijos art�jimo t�pti horizontali� paklaid� reikalavimams, ta�iau neatitinka vertikali� matavim� tikslumai. Taigi automatizuotas nusileidimas vien tik su DGPS yra ne�manomas.[16][18]
4.8. T�pimas su CDGPS
Kitas b�das padidinti jutikli� matavimo tikslum� leid�iantis orlaiviui yra pasinaudoti realaus laiko ne�an�iosios faz�s diferencine GPS. �is metodas suteikia �ymiai didesnius matavimo tikslumus, kas �rodo sistemos privalum� palyginus su viena GPS. Bendroji pozicijos nustatymo klaida orlaiviui tupian�iam su GPS, GPS su auk�tima�iu, arba DGPS buvo priklausoma nuo navigacin�s sistemos klaidos. Tyrimai parod�, kad sistemin�s paklaidos orlaiviui besileid�iant su CDGPS priklauso nuo orlaivio skridimo technini� paklaid�, tai yra, galimyb� orlaiviui sekti �inoma trajektorija esant dideliems i�oriniams fiziniams trukd�iams. Tai rei�kia, kad jutikli� grei�io, koordina�i� ir pad�ties erdv�je matavimo tikslumas yra tiek geras, kad autopiloto veikimas papras�iausiai skirtas solenoid� kontrolei ir keleivi� saugumui bei komfortui. Navigacin�s CDGPS sistemos paklaidos atitinka FAA reikalavimus keliamus tre�iai kategorijai.[17][20]
5. Precizinis orlaivi� tupdymas panaudojant pseudolitus
Orlaivi� tupdymas blogo matomumo s�lygomis reikalauja
pa�i� auk��iausi� navigacini� sistem� veikimo
standart�. Kai i�kyla b�tinyb� ekstremaliomis oro s�lygomis
ir gyvybei kriti�kais momentais, III kategorijos orlaivi� tupdymo sistemos
vertikalaus tikslumo riba turi b�ti ne daugiau kaip dvi p�dos (95%)
ir reikalauja didelio integralumo. Kiekvienam art�jimui t�pti,
klaidingo aptikimo tikimyb� negali vir�yti ![]() .
�ioje dalyje bus aptartos pseudolit� panaudojimo orlaivi� tupdymui
galimyb�s. [33]
.
�ioje dalyje bus aptartos pseudolit� panaudojimo orlaivi� tupdymui
galimyb�s. [33]
5.1. Sistemos ap�valga
Tupdymo sistemos panaudojant pseudolitus vaizdas pateiktas paveiksl�lyje. IBLS yra bandomoji priemon� sukurta pademonstruoti, kad pseudolitais paremta CDGPS navigacin� sistema gali atitikti reikalaujamus navigacinius parametrus RNP reikalingus patupdyti orlaivius. Kadangi IBLS yra tik eksperimentin� ir demonstracin� priemon�, i�bandyta tik idealiomis meteorologin�mis s�lygomis pasitelkiant geriausius pilotus, labai nedaug buvo aptikta sistemos veikim� ribojan�i� faktori� ar kit� trukd�i�. Atsi�velgiant � ICAO likvidumo ir t�stinumo keliamus reikalavimus buvo �rodyta, kad IBLS sistema pilnai atitinka visus automatiniam orlaivi� tupdymui keliamus reikalavimus.
IBLS ant�emin� �ranga susideda i� CDGPS standartinio imtuvo, duomen� perdavimo linijos i� atramin�s stoties iki orlaivio ir poros pseudolit�, i�d�styt� abiejose t�ptin�s pus�se. Pseudolitai transliuoja persidengian�ius, hemisferinius signalus, per kuriuos orlaivis praskrenda prie� pat nut�pim�.
IBLS sistemos ant�eminis referencinis imtuvas nenutr�kstamai priima signalus i� abiej� pseudolit� ir i� ma�iausiai keturi� GPS palydov�. V�liau �iuos signalus atitinkamai apdorojusi per reikiamas duomen� perdavimo linijas persiun�ia orlaiviui. Tiek kryptin� antena, tiek koaksialiniai perdavimo kabeliai buvo panaudoti perduoti pseudolit� signalus � referencin� stot�. �rengin�jant IBLS sistem� pirm� kart�, atramin�s antenos ir abiej� pseudolit� pad�tis apskai�iuojama atsi�velgiant � kilimo-t�pimo tako t�pimo ta�ko koordinates, kurios nustatomos tiksliais statiniais matavimais. Nuo �i� matavim� tikslumo priklausys ir �rengtos sistemos teikiam� navigacini� duomen� kokyb�.
Orlaivio borto �ranga susideda i� CDGPS vartotojo imtuvo ir kompiuterio, kad pagal special� algoritm� apdorot� gaunamus navigacinius duomenis. Vartotojo imtuvas turi dvi antenas: viena nukreipta tiesiai � palydovus, kita nukreipta pseudolit� kryptimi.
Orlaiviui skrendant per pseudolit� transliuojam� signal� veikimo zon�, jis atlieka diferencinius atramin�s faz�s matavimus remdamasis palydov� ir pseudolit� signalais. Kiekvienas laike pa�ym�tas matavim� rinkinys tampa viena didel�s matricos dalimi. D�l to, kad tiesioginio pseudolito matomumo vektorius kinta pakankamai spar�iai, min�toji matrica gali b�ti i�spr�sta.
Kai orlaivis i�skrenda i� pseudolit� signal� �takos zonos, jis jau b�na i�sprend�s matric� ir atramin�s faz�s sveik�j� dal� bei matavim� liekanas. Jei liekamosios dalys vir�ija nustatyt� rib�, formuojamas klaidos signalas ir t�pimas nutraukiamas. Tai ir yra pagrindinis IBLS sistemos integralumo monitorius. Toji gaut�j� paklaid� vir�ijimo riba gali b�ti nustatyta taip, kad patenkint� bet kokius integralumo reikalavimus nedetektuot� signal� tikimybei. Ta�iau tokiu atveju ma��ja tupdymo sistemos likvidumas ir t�stinumas.
Paprastai liekamosios skai�iavim� dalys b�na kur kas ma�esn�s negu nustatytoji reik�mi� riba. Tokiu atveju, orlaivis t�sia �em�jim� kol saugiai nusileid�ia. [28]
5.2. Centimetrinio lygio pad�ties nustatymas
Kinematinis orlaivio pad�ties nustatymas yra pagr�stas preciziniais GPS ne�an�iosios faz�s matavimais. GPS L1 signalo bangos ilgis yra 19 centimetr�, tad moderniausi GPS imtuvai realiame laike gali i�matuoti ne�an�i�j� faz� subcentimetriniu tikslumu. Precizinis pozicijos nustatymas pasibaigia i�matavus ne�an�iosios faz�s skirtumus tarp antenos ir i�matuotos pad�ties ant �em�s bei orlaivio antenos. Sprend�iant ne�an�iosios faz�s cikl� dviprasmi�kumus (bangos ilgio kiekio tarp kiekvienos u�siduotosios anten� poros ir kiekvieno u�siduoto GPS palydovo sveikas skai�ius) imtuvas gali nustatyti savo pad�t� centimetriniu tikslumu.
5. 3. Integrini� �vyturi� (pseudolit�) tupdymo sistem� istorija
IBLS ( Integrated Beacon Landing System) � tai �alutinis NASA remtas Stanfordo universiteto tyrimas. Nauja, paremta GPS ne�an�iosios faz�s matavimais, sistema buvo sukurta ir i�vystyta �iame universitete.[2]
14 pav. Pseudolit� panaudojimas orlaivi� tupdymui pagal III kategorij�.
5.4. Reikalaujami navigaciniai parametrai
Preciziniam t�pimui reikalingi tokie navigaciniai parametrai, kurie atitikt� vis� eil� kit� savybi�, toki� kaip integralumas, tikslumas, likvidumas ir t�stinumas. Aptarsime IBLS sistemos atitikim� visiems �iems reikalavimams.
5. 5. Tikslumas
Pastov�s ir patikimi keli� centimetr� tikslumo matavimai atliekami IBLS sistemos vir�ija tiek ICAO 7 priedo, tiek FAA keliamus reikalavimus vertikaliai III kategorijos tupdymo paklaidai. Kita si�loma RNP tunelio koncepcija reikalauja 15 p�d� esant 100 p�d� auk��iui tikslumo. Tokio dyd�io netur�t� vir�yti bendra sistemos paklaida (TSE- Total System Error). Atliekant apskraidomuosius bandymus su �vairiais autopilotais paai�k�jo, kad IBLS atitiko visus �iuos reikalavimus.
IBLS sistemos suteikiamas matavim� tikslumas turi svarbi� reik�m� projektuojant atsparias nepalankioms s�lygoms tupdymo sistemas. Labai svarbus IBLS privalumas yra ypatingai ma�a navigacini� jutikli� paklaida (NSE- NAvigation Sensor Error). Tokia sistema labai lengvai perne�a neigiamus GPS �vaig�dyno pakitimus, teikdama duomenis su labai ma�omis NSE paklaidomis. Kai navigacini� jutikli� paklaida yra labai ma�a, bendra sistemos paklaida netenka �takos navigacini� jutikli� paklaidai. Bendru atveju, bendra sistemos paklaida:
![]() (2)
(2)
�ia FTE- technin� skryd�io paklaida.
Didelis jutikli� tikslumas ir didesn�s FTE tolerancijos taip pat suteikia didesnes galimybes saugiai nusileist esant stipriems v�jo g�siams.
Svarbu pamin�ti, kad didelis navigacini� jutikli� jautrumas tuo pa�iu padidina ir bendr� sistemos integralum�.
5.6. Integralumas
Integralumas- tai matavimai, kuri� rezultatai gali b�ti
panaudojami koreguojant navigacini� sistem� i��jimuose
formuojamus signalus. Tupdymo pagal III kategorij� reikalavimuose
nurodyta, kad klaidingo t�pimo aptikimo tikimyb� vienam
art�jimui t�pti gali b�ti ![]() .
.
Turb�t did�iausia pseudolit� privilegija yra j� RAIM galimyb�s precizinio art�jimo t�pti ir t�pimo metu. Automatin� imtuvo integralumo kontrol� (RAIM) suteikia �ymiai svarbesnius privalumus prie� tradicin� ant�emin� monitoringo sistem�. Tikriausiai, svarbiausias RAIM privalumas yra tai, kad ji kontroliuoja visus sistemos segmentus, �skaitant ir orlaiv�. Ant�emin�s kontrol�s stotys toki� galimybi� neturi. Kita tradicini� ant�emini� monitoringo sistem� b�da yra tai, kad vis dar egzistuoja su orlaiviu nesusijusi� klaid� nedetektavimas. GPS atveju, viena i� toki� potencialiai pavojing� paklaid� yra susijusi su pseudotriuk�mu.
IBLS, kuri atlieka tiek ant�emin� monitoring�, tiek RAIM, yra atspari su pseudotriuk�mu susijusioms paklaidoms. Tai yra d�l to, kad naudojamasi GPS ne�an�i�ja faze.
Yra dar kelios galimyb�s padidinti sistemos integralum�. Tereikia pasinaudoi papildom� auk��io matavimo prietaisu, meteolokatoriumi ir vaizd� perdavimo sistema.
5.7. Likvidumas
Likvidumas- tai laiko dalis, kurios metu sistema bus paj�gi atlikti savo funkcijas. GPS palydov� panaudojimas �ymiai pagerina tupdymo pagal GPS likvidum�, suteikdamas papildomus atstum� matavimus. IBLS reikalauja tik 4 palydov� signal� pilnam savo funkcionavimui u�tikrinti. Tokiu atveju turi b�ti panaudoti ir signalai i� inercin�s sistemos.
5.8. T�stinumas
T�stinumas- tai sistemos funkcionavimo nutr�kim�
skai�ius per vien� t�pim�. D�l didelio tikslumo
suteikiamo GPS pseudolit�, RAIM integralumo klaiding� signal�
skai�ius gali b�ti ![]() .
.
5.9. Pseudolit� architekt�ra
Centrin� IBLS sistemos fig�ra ir yra pats pseudolitas. Dirbdamas kartu su tradicine ant�emine skirtumini� patais� GPS stotimi �is �emo galingumo si�stuvas suteikia orlaiviui vis� reikiam� informacij� apie atstumus tikslaus t�pimo metu. Aptarsime du pseudolit� tipus: Doplerin� ir universal�j�.
5.10. Doplerinis �vyturys
Doplerinis integruotasis �vyturys yra nepriklausomas, �emo galingumo GPS signal� si�stuvas, kuris tiesiogiai susietas su diferencine stotimi. Doplerinio �vyturio blokin� scema pateikta paveiksl�lyje. Toks pilnai sukonstruotas �vyturys u�ima vos kreditin�s kortel�s dyd�io plot�. Si�stuvas gali veikti ilgiau nei pus� dienos maitinamas tik viena standartine 9 volt� baterija.
Sferoje su 300 metr� spinduliu, si�stuvo galia tesiekia kelis mikrovatus. Signalas i� pseudolito yra tiesiogiai retransliuojamas � diferencini� patais� stot�. Stotyje yra i�matuojamos abiej� abej� pseudolit� signal� ne�an�iosios faz�s ir GPS signalas. Abu �i� matavim� rinkiniai yra siun�iami � orlaiv� panaudojant tradicines diferencini� duomen� perdavimo ry�io linijas.
Universalus �vyturys
�io tipo pseudolitai yra kur kas tobulesn� versija, u�tikrinanti daugiau privalum� u� doplerinius �vyturius. �diegiant tokius �vyturius � IBLS panaikinama b�tinyb� kabeliais sujungti atskirus sistemos komponentus. �ios sistemos koncepcija pavaizduota paveiksl�lyje. Vienoje nepertraukiamoje signal� perdavimo grandin�je universalusis �vyturys perima GPS signal� i� imtuvo antenos, i�koduoja palydovo PRN kod�, suformuoja pseudolito PRN kod� ir persiun�ia nauj� signal�. Siun�iamas signalas yra suri�amas pagal kod� ir ne�ant�j� da�n� bei faz� atsi�velgiant � j� �einan�ius duomenis. Idealiu atveju, si�stuvo ir imtuvo antenos gali b�ti sujungtos. Ta�iau, praktika parod�, kad kai kuriais atvejais �ias abi antenas der�t� i�skirti siekiant izoliuoti radijo signalus. Kiekvienas universalusis �vyturys yra nepriklausomas ir veikiantis automati�kai.
15 pav. Tupdymo sistemos blokin� schema.
5.12. Matomumo analiz�
Pateikiama supaprastinta analiz�, iliustruojanti, kaip pavienis
pseudolitas suteikia duomenis apie radialin� ir i�ilginio kelio
koordina�i� informacij�. Paveiksl�lyje demonstruojama
paprasta linijin� trajektorija einanti tiesiai per pseudolito veikimo
zon�. Orlaivio koordinat�s susideda i� �i� atskir�
dedam�j�: i�ilginio kelio pozicija x, skersinio kelio pozicija y ir
esanti auk��io reik�m� z. Orlaivio pozicijos vektoriaus dydis (x,y,z)
ir yra atstumas iki pseudolito. I�matuotasis atstumas ![]() gaunamas:
gaunamas:
![]() (3)
(3)
�ia b- rei�kia vis� trukd�i� sum� sistemoje (cikli�kas
dviprasmi�kumas, v�linimai atsirandantys duomen� perdavimo kabeliuose
ir kt.). ![]() i�rei�kia kiekvieno imtuvo laiko paklaidas.
Standartinis kinematinis pozicionavimas naudojamas panaikinti laiko nesutapimus
tarp dviej� imtuv� (
i�rei�kia kiekvieno imtuvo laiko paklaidas.
Standartinis kinematinis pozicionavimas naudojamas panaikinti laiko nesutapimus
tarp dviej� imtuv� (![]() ).
Atstumas iki pseudolito taip pat gali b�ti i�matuotas tiesiogiai,
priklausomai nuo prid�tin�s paklaidos b:
).
Atstumas iki pseudolito taip pat gali b�ti i�matuotas tiesiogiai,
priklausomai nuo prid�tin�s paklaidos b:
![]() (4)
(4)
I�matuot� faz� linearizuojant nominalia trajektorija, kuri (paprastai) eina tiesiai vir� pseudolito (y=0), matomumo matric� galima b�t� u�ra�yti sekan�iu b�du:
 (5)
(5)
Svarbu pamin�ti, kad skersinio kelio koordinat�s y n�ra stebimos naudojant pavien� pseudolit�. D�l �ios svarbios prie�asties naudojama sudvejinta pseudolit� sistema. Kai �rengti du pseudolitai kiekvienoje t�ptin�s pus�je, duomenys apie visas tris orlaivio koordinates yra gaunamos. [2][28]
5.13. Matric� formulavimas
Tam, kad kiek galima geriau suprastume, kaip IBLS naudodamasi i� GPS palydov� gaunamais duomenimis suteikia tokias tikslias koordinates, ap�velgsime kaip sudaromos cikl� dviprasmi�kum� matricos. Matematinis sistemos apra�ymas yra atliktas pagal sistemos blokin� schem�. Cikl� dviprasmi�kumo rezoliucijos nustatymo algoritm� vystymas buvo atliktas daugiausiai pagal standartin� diferencin� atstum� nustatymo metod� remiantis duomenimis gautais i� doplerini� �vyturi�. Ta�iau rezultatus galima pritaikyti ir universaliesiems �vyturiams. Paveiksl�lyje 3 pateikiama vektori� sistema pagal kuri� atliekami skai�iavimai.
Neapdorot� atramin�s faz�s matavim�, gaut� i� orlaivio ir atramin�s stoties imtuv�, diferencijavimas atliekamas sekan�iai:
![]() (6)
(6)
�ia ![]() -
diferencijuota palydovo faz�,
-
diferencijuota palydovo faz�, ![]() -
regimosios linijos iki palydovo vektorius,
-
regimosios linijos iki palydovo vektorius, ![]() -
poslinkio tarp diferencin�s stoties GPS antenos ir orlaivio antenos
vektorius,
-
poslinkio tarp diferencin�s stoties GPS antenos ir orlaivio antenos
vektorius, ![]() -
diferencin�s stoties ir orlaivio laiko skali� nesutapimas,
-
diferencin�s stoties ir orlaivio laiko skali� nesutapimas, ![]() -
palydovo i�matuoto atstumo paklaida, atsirandanti d�l atspind�i� ir
imtuvo vidini� triuk�m�.
-
palydovo i�matuoto atstumo paklaida, atsirandanti d�l atspind�i� ir
imtuvo vidini� triuk�m�.
16 pav. Vektori� geometrija.
Pana�iai pseudolitui j epochoje k gauname:
![]() (7)
(7)
�ia: ![]() -
vektorius nuo diferencin�s stoties iki pseudolito j.
-
vektorius nuo diferencin�s stoties iki pseudolito j.
Duota apytiksl� trajektorija ![]() ,
gauta i� kodin�s DGPS, leid�ia �emiau esan�ias i�rai�kas i�reik�ti
per apytiksl�s trajektorijos deviacijas:
,
gauta i� kodin�s DGPS, leid�ia �emiau esan�ias i�rai�kas i�reik�ti
per apytiksl�s trajektorijos deviacijas: ![]() .
.
![]() (8)
(8)
Ir
![]() (9)
(9)
�ia: ![]() .
Tam, kad i�spr�sti cikl� dviprasmi�kum�,turi b�ti tiksliai
nustatyta kiekvieno sveiko skai�iaus reik�m�. Tai daroma d�l
egzistuojan�ios laiko skali� paklaidos, kuri yra bendra visiems
epochoje k atliktiems matavimams. Skai�iavim� supaprastinimui
priimame, kad
.
Tam, kad i�spr�sti cikl� dviprasmi�kum�,turi b�ti tiksliai
nustatyta kiekvieno sveiko skai�iaus reik�m�. Tai daroma d�l
egzistuojan�ios laiko skali� paklaidos, kuri yra bendra visiems
epochoje k atliktiems matavimams. Skai�iavim� supaprastinimui
priimame, kad ![]() .
Nustatomas m GPS palydov� ir dviej� pseudolit� matavim�
vektorius
.
Nustatomas m GPS palydov� ir dviej� pseudolit� matavim�
vektorius ![]() :
:
 ir
ir  (10)
(10)
Atrenkame visus n matavimus, suriktus per skryd� vir� pseudolito, tam, kad nustatyti sekan�i� reik�m�:
 (11)
(11)
Kur:
 (12 )
(12 )
Ir:
![]() (13)
(13)
D�l netiesin�s problemos prigimties, sprendinys ![]() n�ra galutinis atsakymas. Vietoj to,
apytiksl� trajektorija ir matomumo matrica turi b�ti pagerintos
apytikriai apskai�iuotomis
n�ra galutinis atsakymas. Vietoj to,
apytiksl� trajektorija ir matomumo matrica turi b�ti pagerintos
apytikriai apskai�iuotomis ![]() reik�m�mis, ir �is procesas turi
b�ti kartojamas tol, kol
reik�m�mis, ir �is procesas turi
b�ti kartojamas tol, kol ![]() atnaujinimas taps ne�ymus. Konvergencij�
skai�iavimo laikas trunka �iek tiek ma�iau negu sekund� naudojantis
486 serijos procesoriumi. Patirtis parod�, kad per 3-10 iteracij�
gaunamas patenkinamas rezultatas.
atnaujinimas taps ne�ymus. Konvergencij�
skai�iavimo laikas trunka �iek tiek ma�iau negu sekund� naudojantis
486 serijos procesoriumi. Patirtis parod�, kad per 3-10 iteracij�
gaunamas patenkinamas rezultatas.
5.14. Pseudolit� suderinamumas
Nors skirtumin�s GPS technologijos gali padidinti visos sistemos patikimum�, integralum� ir tikslum�, ta�iau ji negali apeiti tam tikrai vietovei b�ding� i�lyg�, ribojan�i� GPS sistemos panaudojamum� specifin�ms reikm�ms. Pagrindinis ribojantis faktorius yra palydov� i�sid�stymo geometrija, palydov� signal� blokavimas d�l vietov�s objekt� arba reljefo nelygum� ir retkar�iais pasitaikantys prasto PDOP faktoriaus periodai, kuri� met� gaunami prasti tikslumo rezultatai netgi sekant pakankam� palydov� kiek�. Vertikaliojo d�mens paklaidos paprastai yra kur kas jautresn�s �iam efektui. Tai ir yra pagrindinis GPS pritaikym� aviacijoje ribojantis faktorius. B�na atveju, kai navigacinis sprendinys negaunamas ir d�l nepakankamo matom� palydov� skai�iaus.[21][40]
Pseudolit� panaudojimas gali i�spr�sti �ias ir daugel� kit� su matavim� tikslumu susijusi� problem�. Pseudolitas- tai papras�iausias ant �em�s pastatytas si�stuvas, kuris siun�ia tokius pa�ius, kaip ir GPS palydovas signalus. Siun�iami signalai priimami vartotojo imtuve ir panaudojami pseudo-atstum� skai�iavimuose. Pseudolit� signalai taip pat gali perduoti �vairius duomenis, taip padidindami signal� patikimum� ir integralum�. Pagrindiniai pseudolit� privalumai:
Geometrijos pagerinimas. Pseudolitai, veikiantys kaip papildomi GPS sistemos palydovai, �ymiai pagerina sistemos si�stuv� i�sid�stymo geometrin� faktori�, taigi, ir pad�ties nustatymo tikslum�. Tai u�tikrinama tik pseudolito veikimo zonoje. Vertikalusis (VDOP), kaip ir horizontalusis (HDOP) tikslumo praradimo faktorius yra �ymiai pagerinamas, o tai yra vienas i� svarbiausi� rodikli� pritaikytin� aviacijoje. Atlikti eksperimentai parod�, kad 20-40 kilometr� spinduliu aplink pseudolit�, PDOP reik�m�s suma��ja iki 3, kai stebima net ma�iau negu reikalaujama palydov�.
Signal� prieinamumo pagerinimas. Kai stebima ma�iau nei reikia palydov� reikaling� gauti navigacin� sprendin�, pseudolit� siun�iami signalai lengvai i�sprend�ia �i� problem�.
B�dingas skirtumini� patais� transliavimas. Pseudolit� siun�iami GPS signalai turi galimyb� perduoti ir skirtumines pataisas, kurios gali b�ti priimamos imtuve. Tai suteikia galimyb� gauti skirtumines pataisas atsisakant papildom� duomen� perdavimo linij�.
Savaiminis persp�jimas apie gedim�. Pseudolit� siun�iami papildomi signalai vartotojui suteikia galimyb� vykdyti savo paties gedim� �vertinim�. Pavyzd�iui, jei tariam�j� atstum� matavimai atliekami i� keturi� orbitoje esan�i� palydov� ir vieno ant�eminio pseudolito, problema gali b�ti aptikta tikrinant matavim� nuoseklum�. Jei naudojami signalai i� dviej� pseudolit� tokiu atveju ne tik aptinkami blogi signalai, bet ir identifikuojamas j� si�stuvas. Tokie privalumai ypa� naudingi aviacijoje, kur pilotas apie blogus signalus turi b�ti informuojamas labai greitai (1-10 sekund�i�).
Signal� blokavimo (nepasiekiamumo) problemos i�sprendimas. Papildomi GPS signalai siun�iami pseudolit� gali pa�alinti problem�, kai palydov� signalai nepasiekiami d�l pavir�iaus objekt� ar reljefo nelygum�.
5.15. Pseudolit� signal� strukt�ra
Idealiu atveju pseudolit� siun�iami signalai vartotojo imtuve
gali b�ti priimami be joki� imtuvo modifikacij� arba tik su
minimaliais vartotojo imtuvo konstrukcijos pakeitimais. Tokiu atveju rei�kia,
kad pseudolit� signalai turi tur�ti savo unikal� C/A kod�
su tokiomis pa�iomis charakteristikomis kaip ir GPS palydov�
signal� C/A kodai. Ta�iau, b�t� labai sunku i�vengti
palydovo ir pseudolito signal� interferencijos vartotojo imtuve.
Interferencijos problema i�kilt� net ir tuo atveju, kai pseudolit� ir
palydov� C/A kodai ortogonal�s. Bet fundamentali pseudolit�
panaudojim� ribojanti problema vadinama �toli-arti� problema, atsirandanti
d�l pseudolito signalo galios atvirk�tin�s priklausomyb�s nuo
atstumo kvadrato. Tokia problema nei�kyla GPS palydovams, nes atstumai tarp
palydov� ir imtuvo kei�iasi labai nedaug �io atstumo vidutin�s
vert�s at�vilgiu. Tai negalioja pseudolitams. Problema kyla d�l to,
kad imtuve priimamo pseudolito signalo stiprumas turi b�ti apytiksliai
lygus palydovo signalo stiprumui. Jei pseudolito signalas savo galia yra
apytiksliai lygus palydovo signalui ir imtuvas yra u� 50 kilometr� nuo
si�stuvo, tai signalas bus 60 dB stipresnis imtuvui esant vos 50
metr� nuo si�stuvo. Esant tokiam atstumui, pseudolito signalas bus
tiek stiprus, kad u�gos i� palydov� sklindan�ius signalus. 
17 pav. Pseudolito �Arti-toli� problema
5.16. �Arti-Toli� problema
Nuspr�sta, kad oro uosto pseudolitas yra suprojektuotas asistuoti orlaiv� art�jimo t�pti metu. Kai kurios skryd�io taisykl�s, reglamentuojan�ios art�jim� t�pti pagal ILS, reikalauja, kad orlaivio borto aparat�ra turi sekti pseudolito signalus dar prie� pradedant atlikin�ti art�jimo t�pti priced�ras. Signalai i� pseudolito tur�t� b�ti priimin�jami nuo KTT esant per 32 km. Viena i� si�lom� pseudolito pad��i� yra pastatyti j� �alia KTT netoli ILS sistemos t�ptin�s si�stuvo. Nusileid�s orlaivis b�t� per 10 metr� nuo pseudolito.
�Arti� ir �toli� atstum� santykis yra ma�daug 3200 prie 1. Jei pseudolitas transliuoja nekintan�io galingumo signalus, orlaivio borto �rangos priimamo signalo lygis kei�iasi pagal atstumo iki pseudolito kvadrato atvirk�tin� priklausomyb�.[27][28]
5.17. Pseudolit� signal� formavimo pasi�lymai
Naudoti ger� charakteristik� pseudo-triuk�m� kodus. Apsauga nuo pseudolito 60 dB slopinimo reikalauja si�sti kur kas ilgesn� kod� negu palydovo C/A kodas. Tai b�t� labai neprakti�kas sprendimas, �ymiai padidinantis imtuvo kain� ir suma�inantis suderinamum� su GPS.
Pseudolito da�nio poslinkis. Stumiant pseudolito ne�ant�j� da�n� � �on� nuo 1575,42 MHz L1 da�nio, imtuvo filtrai pad�t� i�vengti pseudolito ir palydovo signal� interferencijos. Ta�iau ir tai b�t� neprakti�kas sprendimas, �ymiai padidinantis imtuvo kain� ir suma�inantis suderinamum� su GPS.
Ma�os galios cikl� signal� laikinis paskirstymas. Si�loma i�eitis pseudolitui transliuoti L1 da�nio trumpus, ma�o galingumo impulsus, kurie su palydovo signalais interferuot� tik labai trump� laiko tarp�. Tokia signalo strukt�ra imtuvo konstrukcijos beveik nelemt�. Tokie pseudolit� signalai i�laikyt� suderinamum� su visa GPS sistema. � pagalb� pasitelkiamas 51 naujas Gold�io kod� rinkinys su tokiu pa�iu periodu bei skilteli� skai�ium kaip ir GPS palydovo C/A kode. Nors kodo seka generuojama nenutr�kstamai tiek pseudolite, tiek vartotojo imtuve, pseudolitas savo navigacinius duomenis siun�ia tik per 90,91 μs interval� kas 10 ms. Toks laiko tarpas atitinka pus� duomen� bito. Kiekvienas i� vienuolikos toki� interval� perduoda 93 naujas kodo skilteles. Taigi, visos 1023 kodo skiltel�s perduodamos per 10 ms. Atstumas tarp siuntimo interval� yra atsitiktinis.
5.18. Pseudolit� charakteristikos
Pseudolito identifikavimas. Pseudolit� identifikavimas atliekamas � pagalb� pasitelkiant unikal� Gold�io kod� ir pseudolito fizin� pad�t�. Pad�tis perduodama 50 bps duomen� seka. Kadangi pseudolit� signalai yra labai silpni ir gali b�ti priimami tik tam tikroje zonoje, tuo atveju, kai pseudolitai yra pakankamai toli vienas nuo kito, galima naudoti du vienodus Gold�io kodus. Tokiu atveju taisyklingas pseudolito identifikavimas u�tikrinamas nustatant pseudolito pad�t�.
Pseudolito laiko skal�s poslinkis. Kadangi pseudolitai gali tikrinti GPS signal� kokyb� neribot� laik�, jie taip pat gali nustatyti ir GPS laik�. Tai suteikia galimyb� pseudolit� siun�iamoms epochoms b�ti teisingoms GPS laiko at�vilgiu. Taigi, atkrenta b�tinyb� si�sti pseudolit� laiko korekcijas.
Siun�iamo signalo galia. Pirmin� pseudolit� panaudojimo sritis yra orlaiviai oro uoste ir jo prieigose. Taigi, maksimali pri�mimo zona yra 50 km. Tokiu atstumu visakrypt� sferin�s krypti�kumo diagramos antena spinduliuoja apytiksliai 30 mW galios signalus. Spinduliuojam� signal� galia pana�i � GPS palydov� signal� gali� (-116 dB). 50 metr� atstumu nuo pseudolito, signal� galia bus 60 dB didesnis.
Pseudolito �inut�s strukt�ra. Nors pseudolito duomen� srautas yra 50 bps, kad b�t� galima u�tikrinti jo suderinamum� su GPS imtuvu, prane�imo strukt�ra turi b�ti modifikuota taip, kad pseudolito siun�iam� informacij� b�t� �manoma atskirti nuo GPS siun�iam� duomen�.
Minimalus atstumas tarp pseudolit�. Atstumas tarp pseudolit� priklauso nuo to, kok� Gold�io kod� naudoja vienas ar kitas pseudolitas.
5.19. Pseudolit� su vienodais Gold�io kodais atskyrimas
Vienas i� b�d� atskirti du vienod� Gold�io kod� naudojan�ius pseudolitus yra sinchronizuoti pseudolit� signal� siuntimo intervalus skirtingiems momentams. Tokia technologija garantuoja, kad siun�iami duomenys i� skirting� pseudolit� imtuve nepersidengs. Kad tai b�t� kokybi�kai �gyvendinta, atstumas tarp pseudolit� turi b�ti ma�iausiai 130 km. Toks atstumas garantuoja, kad vartotojas b�damas per 50 km nuo pageidaujamo pseudolito bus ma�iausiai per 80 km nuo nepageidaujamo pseudolito. Nepageidaujamo pseudolito signalai sklis dar ma�iausiai 30 km ir u�truks 100 μs ilgiau. Turint omenyje, kad impulso plotis yra 90,91 μs, dviej� pseudolit� impulsai nepersidengs interferencijos bus i�vengta.
Ta�iau egzistuoja kur kas konservatyvesnis pseudolit� atskyrimo per atstum� variantas. Kito metodo esm� yra atitolinti pseudolitus vien� nuo kito tokiu atstumu, kad vieno pseudolito signalai b�t� per silpni interferencijai. Tarkime, kad vienas pseudolitas yra nustatytas pasiekti reikiam� -126 dB stiprum� imtuve, kai atstumas iki pseudolito yra 50 km. Kito, nepageidaujamo pseudolito signal� stiprumas turi b�ti bent 14 dB silpnesnis. Remiantis papras�iausiais skai�iavimais galima apskai�iuoti, kad toks signal� susilpn�jimas bus tik u� 250 km. Taigi, tokiu atveju atstumas tarp dviej� vienod� Gold�io kod� naudojan�i� pseudolit� turi b�ti ne ma�esnis kaip 300 km.
5.20. Pseudolit� su skirtingais kodais atskyrimas
Kai vartotojas turi vienu metu priimti signalus i� keli� pseudolit�, signal� atskyrimas tarp skirting� pseudolit� gali b�ti �gyvendintas � pagalb� pasitelkiant skirtingus siun�iamo signalo impuls� i�d�stymus laike. Ai�ku, toks sprendimas sistem� padarys sud�tingesn�. �io metodo esm� yra naudoti sinchroni�kus duomen� perdavimus, bet pseudolitus atskirti taip, kad kai priimami signalai imtuve persidengia, imtuvas vistiek paj�gus juos atskirti. Tokios sistemos pavyzdys parodytas 15 paveiksl�lyje. Pseudolitai yra nutol� ma�iausiai per 27,25 km. Tai yra per atstum�, kur� nukeliauja signalas per vien� siuntimo impuls�. Kai signalai siun�iami sinchroni�kai, egzistuoja taip vadinamas centrinis regionas, apribotas hiperbol�mis i� de�in�s ir kair�s pusi�. Atstumas tarp rib� yra min�ti 27,25 km, kai linija eina per abu pseudolitus. �i distancija yra nepriklausoma nuo atstumo iki palydov�, ta�iau hiperbol�s kreivumas ma��ja did�jant atstumui tarp pseudolit�. U� centrin�s zonos rib� pseudolit� signalai nepersidengs ir bus lengvai identifikuojami imtuve. Sunkumai susij� su persidengusi� pseudolit� signal� atskyrimu centrin�je zonoje yra pseudolit� atskyrimo funkcijos. Atskyrimas yra sunkiausias, kai imtuvas yra ant hiperbol�s ir ties�s jungian�ios pseudolitus susikirtimo ta�ko. Tokiu atveju artimesnio signalo galia gali u�go�ti tolesnio pseudolito signal�.
18 pav. Minimalus atstumas tarp pseudolit�
5.21. Imtuvai, pritaikyti priimti pseudolit� signalus
Pagrindiniai reikalavimai imtuvui, priiman�iam pseudolit� signalus:
Nenutr�kstantis signal� pri�mimas. Imtuvas turi nenutr�kstamai gauti pseudolit� siun�iamus navigacinius duomenis, tod�l �iai u�duo�iai turi b�ti skirtas atskiras kanalas.Taigi, vieno kanalo l�to eili�kumo imtuvas netur�t� b�ti naudojamas pseudolit� signalams priimti. Tai n�ra problema �iais laikais, kai beveik kiekvienas civilis imtuvas turi kelis pri�mimo kanalus.
Galimyb� sekti pseudolit� Gold�io kodus. Imtuvas turi b�ti suprijektuotas taip, kad gal�t� generuoti ir sekti visus 51 specialius C/A kodus skirtus specialiai pseudolitams.
Pseudolit� signal� interferencijos su GPS signalais suma�inimas
Galimyb� priimti persidengian�ius pseudolit� signalus. Grup� pseudolit�, suprojektuot� dirbti vienu metu, turi b�ti nutol� vienas nuo kito palyginus nedideliais atstumai. Tai sukelia nepageidaujam� signal� persidengim� imtuve tam tikrose veikimo zonose. Taigi, imtuvas turi b�ti suprojektuotas taip, kad atskirt� persidengian�ius signalus.
5.22. Atsparumas pseudolit� signalams
Deja, ne visi imtuvai gali ir turi priimti pseudolit� signalus. Taigi, imtuvo, suprojektuoto nepriimti pseudolit� signal�, ��jime 60 dB stipresni pseudolit� signalai netur�t� interferuoti su palydov� siun�iamais signalais. Ta�iau �is reikalavimas netur�t� b�ti per daug vertinamas, nes ateityje pseudolit� panaudojimas bus labai platus, ypa� oro uosto teritorijose. Ta�iau, paseudolit� signal� nenaudosiantys vartotojai vis d�l to tur�t� b�ti susipa�in� su pseudolit� signal� slopinamuoju efektu palydov� signalams.
5.23. Ne�lio faz�s skirtumin� GPS
Kiekviena C/A kodo skiltel� atitinka ma�daug 293 metr� ilg�; kiekvienas L1 kodo ciklas atitinka ma�daug 19 cm ilg�. Tai yra pagrindiniai dyd�iai, kuriuos matuoja GPS imtuvas. Geros kokyb�s GPS imtuvas gali i�matuoti dyd�ius su 1% tikslumu. 0,5 metro tikslumo duomen� nustatymas atitinka 1mm paklaida faziniuose matavimuose. Nepaisant tokio didelio ne�lio faz�s matavimo prana�umo, �i technologija dar labai ma�ai naudojama d�l sprendini� nevienareik�mi�kumo.[2]
5.24. Ne�lio faz�s nevienareik�mi�kumas
C/A kodas sugeneruotas taip, kad b�t� i�vengta sprendini� nevienareik�mi�kumo; kiekviena skiltel� yra unikali ir negali b�ti supainiota su kaimynine kodo skiltele. D�l �ios prie�asties tariam�j� atstum� galima nustatyti tiesiogiai i� C/A kodo. Ta�iau ne�lio faz�s ciklai n�ra unikal�s. Kiekvienas ciklas yra lygiai toks pat kaip lik� kiti. Imtuvas gali i�matuoti trupmenin� faz�s dal� plius sutart� skai�i� faz�s cikl�. Deja, imtuvas negali nustatyti viso fazi� cikl� skai�iaus tariamajame atstume. �is skai�ius, �inomas kaip sveik� ciklo dali� neapibr�tumas, turi b�ti randamas remiantis metodais, o ne tiesioginiais matavimais. 16 paveiksl�lyje kaip tik ir parodytas toks metodas.
Kai trupmenin� faz�s ciklo dalis kerta nulin� lyg� � teigiam� arba neigiam� pus�, imtuvas gali didinti arba ma�inti sveik� faz�s cikl� skai�i�. Santykinis ne�lio faz�s matavimas ir i� momentinio trupmenin�s faz�s dalies nustatymo ir sveiko faz�s cikl� skai�iaus. [29][34]
Nors teori�kai yra �manoma remiantis ne�lio faz�s matavimais gauti navigacinius duomenis apie atstumus iki palydovo, prakti�kai navigacija remiantis �ia technologija yra �gyvendinama kitaip. Atramin� stotis su tiksliai �inomomis savo koordinat�mis matuoja santykinius ne�lio faz�s atstumus iki kiekvieno matomo palydovo ir siun�ia duomenis artimoje zonoje esantiems vartotojams. Vartotojo imtuve surandamas skirtumas tarp atramin�s stoties matavim� rezultat� ir imtuvo matavimo rezultat�. Taip suformuojamas visas skirtumini� faz�s tariam�j� atstum� matavim� rinkinys:
![]() 14)
14)
�ia: ![]() - skirtuminis ne�lio faz�s matavimas palydovui i;
- skirtuminis ne�lio faz�s matavimas palydovui i; ![]() - vartotojo imtuvo pad�tis;
- vartotojo imtuvo pad�tis; ![]() - atramin�s stoties pad�tis;
- atramin�s stoties pad�tis; ![]() - vienetinis vektorius nuo imtuvo iki palydovo;
- vienetinis vektorius nuo imtuvo iki palydovo; ![]() - sveikas cikl� skai�ius iki palydovo;
- sveikas cikl� skai�ius iki palydovo; ![]() - skirtumini� matavim� paklaid� suma palydovui
i.
- skirtumini� matavim� paklaid� suma palydovui
i.
19 pav. Ne�lio faz�s matavimas ir sveik� ciklo dali� nevienareik�mi�kumas.
Sveikas cikl� skai�ius ![]() gali b�ti
nustatytas i� momentini� GPS signal�. �is dydis nustatomas �
pagalb� pasitelkiant kitas priemones. Kai nevienareik�mi�kumas yra
�inomas, toliau randamas navigacinis sprendinys remiantis �inomais algoritmais.
gali b�ti
nustatytas i� momentini� GPS signal�. �is dydis nustatomas �
pagalb� pasitelkiant kitas priemones. Kai nevienareik�mi�kumas yra
�inomas, toliau randamas navigacinis sprendinys remiantis �inomais algoritmais.
5.25. Ne�lio faz�s nevienareik�mi�kumo skiriamoji geba
Jei nenaudojami pseudolitai, ne�lio faz�s nevienareik�mi�kumo suradimas �manomas trimis metodais: paie�ka, filtravimu ir geometrija. Visi �ie metodai prasideda nuo pradin�s trajektorijos dalies nustatymo; da�niausiai ji nustatoma remiantis ne�lio faz�s matavimais. Paie�kos ir filtravimo metodams papildomai b�tina nustatyti pradin�s pad�ties matavimo paklaidas.[32]
5.26. Nevienareik�mi�kumo i�sprendimas naudojant pseudolitus
Pseudolit� panaudojimas labai palengvina faz�s nevienareik�mi�kumo sprendinio radim�. Kai imtuvas kerta pseudolito veikimo zon� �steb�jimo linijos� vektorius nuo pseudolito iki vartotojo imtuvo kei�iasi dideliu kampu. Kampo pasikeitimas nuo 60� iki 90� gali b�ti pasiektas per labai trump� laik�. Toks kampo pasikeitimas faz�s nevienareik�mi�kumo sprendinyje suformuoja geometrin� matric�. DOP reik�m�s, rastos i� min�tosios matricos visi�kai apra�o tokio sprendinio tikslum�.
Supaprastintas pavyzdys parodytas 17 paveiksl�lyje. Laivas plaukdamas � �lank�, praplaukia pseudolito veikimo zon�. Borto �ranga pritaikyta CDGPS navigacijai. Laivo borto imtuvas seka GPS palydov� ir pseudolito signalus. Atramin� stotis taip pat seka tuos pa�ius palydov� signalus ir per duomen� perdavimo linij� perduoda laike pa�ym�tus vienalaikius matavimus.[28]
20 pav. Ne�lio faz�s nevienareik�mi�kumo sprendinio suradimas pseudolitu.
Laivo imtuvas suranda matavim� duomen� skirtum� tarp savo matavim� ir atramin�s stoties matavim�. V�liau apytiksliai apskai�iuojamos pad�ties koordinat�s. Tuo pat metu laivo imtuvas apskai�iuoja CDGPS trajektorij�, atitinkan�i� kodo faz�s matavim� metu nustatyt� trajektorij�. Apskai�iuotoji CDGPS trajektorija yra lygiai tokios pa�ios formos, kaip ir tikroji laivo jud�jimo trajektorija, nustatoma centimetriniu CDGPS matavim� tikslumu. Ta�iau, sutampa tik trajektorij� forma. CDGPS matavimais nustatyta trajektorija yra �iek tiek perstumta � vien� ar kit� pus�. Taip yra d�l ne�inomo faz�s cikl� skai�iaus. Faz�s cikl� nustatymo proceso metu bus surastas trajektorijos post�mio vektorius.
Laivui praplaukiant pseudolito veikimo zon�, tiesioginio matomumo vektoriaus kryptis ir dydis labai smarkiai kei�iasi. Laivo imtuvas CDGPS trajektorijos nesutapimus palygina su vienalaikiais skirtuminiais ne�lio faz�s matavimais. Toks palyginimas suteikia galimyb� surasti trajektorijos koordinates �inom� pseudolito koordina�i� at�vilgiu.
Pavyzd�iui, jei laivo plaukimo trajektorija yra pusapskritimis, kurio centro koordinat�s sutampa su pseudolito koordinat�mis, tai skirtuminiai ne�lio faz�s atstumo iki pseudolito matavimai bus vienodi. CDGPS matavim� metu bus precizi�kai tiksliai nustatoma trajektorijos forma- pusapskritimis, ta�iau nebus �inomas jo centras. Kuo didesnis pusapskritimio kampas, tuo tikslesni matavimai.
Jei laivas plaukia tiesia linija, kertan�ia pseudolito veikimo zon�, atstumas iki pseudolito bus parabolin� funkcija. Parabol�s centras rodys ar�iausio art�jimo link pseudolito linij�, o parabol�s forma rodys atstum� nuo pseudolito iki jud�jimo linijos. Ir v�l, kuo didesnis tiesioginio pseudolito matymo vektoriaus kampo pasikeitimas, tuo didesnis matavim� tikslumas. Praktiniais eksperimentais nustatyta, kad jei pseudolito tiesioginio matomumo vektoriaus kampas kei�iausi daugiau nei 90�, gaunamas keli� centimetr� matavim� tikslumas.
Kol surandamas faz�s cikl� nevienareik�mi�kumo sprendinys, reikalingi signalai i� ma�iausiai keturi� orbitose esan�i� palydov�. V�liau imtuvui esant pseudolito veikimo zonoje palydov� signalai tampa nebereikalingi.
CDGPS sprendinio tikslumas galioja tik vienoje plok�tumoje- tiesioginio matomumo vektoriaus plok�tumoje. Vertikalusis laivo pad�ties matmuo yra kitoje plok�tumoje ir nustatomas �ymiai netiksliau. Ta�iau,laivui tai n�ra gyvybi�kai svarbu. Ta�iau orlaiviui ar kitai transporto priemonei, kuriai reikia tiksli� koordina�i� trimat�je erdv�je, jau reikt� gauti duomenis i� dviej� ar daugiau pseudolit�.
6. Sinchrolitai
Vietoj nauj� signal�, identi�k� GPS signalams, generavimo, pseudolitai gali persi�sti koherenti�k� palydovo signalo kopij�. Tokiu atveju pseudolitas veikia kaip elektroninis veidrodis, atspindintis palydovo signalus i� gerai �inomos ant�emin�s pad�ties. Imtuvas gali atskirti tiesiogin� palydovo signal� nuo atspind�to signalo ir atlikti skirtumines kodo bei ne�lio faz�s tariam�j� atstum� matavimus. Visos erdvin�s palydovo signalo paklaidos yra pa�alinamos, kaip ir kituose LDGPS matavimuose. [28][35]
21 pav. Sinchrolito atspind�tas GPS palydovo signalas.
Pseudolitas, kurio siun�iamieji signalai yra sinchronizuoti su priimamais palydovo signalais, vadinamas sinchronizuotu palydovu- sinchrolitu. Sinchrolito v�linimo laikas yra �inomas ir gali siekti iki keli� milisekund�i�. Paprastos DGPS stoties v�linimo laikas yra kur kas ilgesnis.
Jeigu sinchrolitas vienu metu atspindi ma�iausiai keturi� palydov� signalus, vartotojas apskai�iuoti savo tikslias koordinates remdamasis vien sinchrolitu.
6.1. Skirtuminiai sinchrolito matavimai
Vartotojo imtuvas vienu metu gali matuoti tariamuosius atstumus i� tiesiogiai matotmo palydovo signal� ir i� tiksliai �inom� pad�ties koordina�i� ant�eminio sinchrolito. Gauti skirtuminiai matavimai pa�alina visas su jonosferos v�linimais susijusias paklaidas. Nepa�alinamos tik atspind�i� nuo vietov�s objekt� sukeltos paklaidos.
22 pav. Skirtumini� sinchrolito atstum� matavimai.
Sinchrolito skirtuminio tariamojo atstumo matavimai parodyti 20 paveiksl�lyje. GPS palydovas yra pakankamai toli, kad jo signal� frontai �em�s pavir�iuje b�t� lygiagret�s. Geometrinis atstumas nuo palydovo i iki vartotojo per sinchrolit� j yra apskai�iuojamas taip:
![]() (15)
(15)
Geometrinis atstumas nuo palydovo iki vartotojo u�ra�omas taip:
![]() (16)
(16)
Antrasis �ios lygties d�muo i�rei�kia atstum�, priklausant� nuo palydovo ir vartotojo tarpusavio pad�ties sinchrolito at�vilgiu. Imtuvas matuoja tariamuosius atstumus priklausan�ius nuo �i� atstum�. Kodo faz�s matavimais i�matuoti atstumai pasiekiami visada.
 (17)
(17)
�ia: ![]() - skirtuminis tariamasis atstumas nuo palydovo iki
sinchrolito,
- skirtuminis tariamasis atstumas nuo palydovo iki
sinchrolito, ![]() - vienetinis tiesioginio matomumo vektorius nuo palydovo iki
vartotojo,
- vienetinis tiesioginio matomumo vektorius nuo palydovo iki
vartotojo, ![]() - tiesioginio matomumo vektorius nuo sinchrolito iki
vartotojo, c- �viesos greitis,
- tiesioginio matomumo vektorius nuo sinchrolito iki
vartotojo, c- �viesos greitis, ![]() - signalo sklidimo pro sinchrolit� laikas,
- signalo sklidimo pro sinchrolit� laikas, ![]() - sumin� paklaida, susijusi su skirtuminiais matavimais.
- sumin� paklaida, susijusi su skirtuminiais matavimais.
6.2. Sinchrolit� skirtumin� navigacija
Sinchrolito skirtumin� navigacija yra labai pana�i � paprastos GPS navigacij�. Tarkime, kad signalas i� palydovo yra atspindimas trij� sinchrolit�.
23 pav. DGPS pad�ties nustatymas sinchrolitais.
Vartotojo imtuvas priima vis� rinkin� skirtumini� pseudoatstum�:
![]() (18)
(18)
Kai tiksliai �inomas ne�lio faz�s nevienareik�mi�kumo sprendinys, skirtuminis ne�lio faz�s tariamasis atstumas nustatomas �ymiai tiksliau.
Paskutin� i�rai�k� pertvarkius taip, kad ne�inomieji likt� kair�je lygyb�s pus�je, o �inomieji dyd�iai de�in�je, gauname:
![]() (19)
(19)
�ia ![]() - pataisyta tariamojo atstumo reik�m� nuo sinchrolito j iki vartotojo. Matavimai paremti
palydovo I signalais.
- pataisyta tariamojo atstumo reik�m� nuo sinchrolito j iki vartotojo. Matavimai paremti
palydovo I signalais.
Gausime pirmin� vartotojo
pad�ties reik�m� ![]() . Remiantis �inomomis sinhrolito koordinat�mis
. Remiantis �inomomis sinhrolito koordinat�mis ![]() ir v�linimo laiku
ir v�linimo laiku
![]() , nustatome dyd�ius
, nustatome dyd�ius ![]() ,
, ![]() ir
ir ![]() . Skirtumas
. Skirtumas ![]() tarp nustatyto ir
i�matuoto tariam�j� atstum� gali b�ti i�rei�kiamas taip:
tarp nustatyto ir
i�matuoto tariam�j� atstum� gali b�ti i�rei�kiamas taip:
![]() (20)
(20)
Trys ar daugiau �i� atstum� gali b�ti panaudoti suformuojant skai�iavim� matric�:
![]() (21)
(21)
�ia:
 ,
,  ir
ir  (22)
(22)
�ios matricos, kaip paprastos GPS
atveju, sprend�iamos iteracij� b�du. Gautasis sprendinys bus
tikrosios pad�ties vektorius ![]() . Viena galima komplikacija yra tai, kad tiesioginio matomumo
vektorius
. Viena galima komplikacija yra tai, kad tiesioginio matomumo
vektorius ![]() i� skirting�
sinchrolit� iki vartotojo gali labai smarkiai keistis. �ie pasikeitimai
gali sukurti tam tikr� rib�, u� kurios navigaciniai algoritmai
tarpusavyje daugiau nebus susij�.
i� skirting�
sinchrolit� iki vartotojo gali labai smarkiai keistis. �ie pasikeitimai
gali sukurti tam tikr� rib�, u� kurios navigaciniai algoritmai
tarpusavyje daugiau nebus susij�.
Kiekviena �ios matricos eilu�i� atitinka atskir� skirtumin� matavim�- vieno vienu sinchrolitu atspind�t� vieno palydovo signal�. �ios lygtys gali b�ti prapl�stos pridedant po eilut� kiekvienam galimam matavimui. Galimas matavim� skai�ius priklauso nuo vis� matom� palydov� ir sinchrolit� skai�iaus ir nuo palydov� signal� skai�iaus atspind�t� vienu sinchrolitu.
Imtuvo kanal� skai�ius taip pat turi didel�s �takos matavimams. �iandieniniai imtuvai da�niausiai b�na 12 kanal�, ta�iau m�s� atveju geriausiai b�t� tur�ti 48 ar daugiau kanal� imtuv�. Tai reikalinga, kad b�t� �manoma apdoroti visus signalus.[28][37][38]
6.3. Sinchrolit� navigacijos geometrija
Sinchrolit� i�sid�stymo �tak� matavim� tikslumui nusakan�ios matricos sudarymas yra labai pana�us � paprastos GPS matricos G sudarym�. Kiekviena paprastos GPS matricos eilut� i�rei�kia atskir� vienetin� vektori�, o kiekviena sinchrolit� matricos eilut� i�rei�kia skirtum� tarp dviej� vienetini� vektori�. �io skirtuminio vektoriaus dydis kinta nuo 2 iki 0. I� pirmo �vilgsnio tai gali atrodyti keista, bet tai �manoma paai�kinti.
24 pav. PDOP trims optimaliai i�d�stytiems pseudolitams
Kai sinchrolitas yra tarp palydovo ir imtuvo, atspind�tas signalas nukeliauja tok� pat� atstum� kaip ir tiesioginis palydovo signalas. I�matuotas skirtuminis atstumas bus lygus 0 esant bet kokiam atstumui iki sinchrolito. Taigi, �is dalinis matavimas navigaciniam sprendiniui suteikia naujos informacijos.
Prie�ingu atveju, imtuvas yra tarp palydovo ir sinchrolito. Bet koks imtuvo pad�ties pasikeitimas i�ilgai �ios linijos suformuos lygiai dvigubai didesn� skirtumin� tariam�j� atstum�. Tokiu atveju, geometrinio vektoriaus dydis bus lygus 2.
Kaip ir paprastai GPS, taip ir sinchrolitams gali b�ti apskai�iuotas geometrinis tikslumo praradimo faktorius. Remiantis ank��iau aptartu trij� sinchrolit� ir vieno palydovo atveju, geriausios DOP reik�m�s pasiekiamos, kai sinchrolitai suformuoja lygiakra�t� trikamp�. Palydovas yra tiesiai vir� �io trikampio centro, o imtuvas yra tarp palydovo ir trikampio centro.
Tokiam atvejui DOP reik�m�s pavaizduotos 21 paveiksl�lyje. Tai yra vartotojo pad�ties vietos kampo funkcija sinchrolito at�vilgiu.[39][36]
6.4. Sinchrolit� navigacija, kai ne�inomi v�linim� laikai.
Iki �iol tar�me, kad
kiekvienam sinchrolitui j jo
v�linimo laikas ![]() yra �inomas.
Ta�iau taip gali b�ti ne visada arba kalibravimas gali b�ti ne
visi�kai tikslus. Jei kiekvienas sinchrolitas atspindi du ar daugiau
palydov� signalus ir, jei bendras pasiekiam� signal� kiekis yra
pakankamai didelis, tada signal� v�linimai
yra �inomas.
Ta�iau taip gali b�ti ne visada arba kalibravimas gali b�ti ne
visi�kai tikslus. Jei kiekvienas sinchrolitas atspindi du ar daugiau
palydov� signalus ir, jei bendras pasiekiam� signal� kiekis yra
pakankamai didelis, tada signal� v�linimai ![]() gali b�ti
apskai�iuojami kaip navigacinio algoritmo dalis.
gali b�ti
apskai�iuojami kaip navigacinio algoritmo dalis.
Tarkime, kad skirtumini� tariam�j� atstum� matavimai yra pasiekiami i� m sinchrolit�, atspindin�i� signalus i� n palydov�. Tokiu atveju j=1,20 ir i=m+1,m+2m+n.
U�ra�omi patikslinti skirtuminiai tariamieji atstumai:
![]() (23)
(23)
�iuo atveju ![]() yra de�in�je
lygties pus�je kaip ne�inomasis.
yra de�in�je
lygties pus�je kaip ne�inomasis.
Nustatome pradin�
pad�t� ![]() , bei randame v�linim�
, bei randame v�linim� ![]() .
.
 (24)
(24)
Matricos komponentai:
 ,
,  (25)
(25)
Ir:
![]() (26)
(26)
Kaip ir ankstesniuoju atveju, �i
matrica gali b�ti i�spr�sta iteracij� b�du. Rezultatai
susideda i� atnaujint� pozicijos ![]() ir sinchrolito
v�linimo laiko
ir sinchrolito
v�linimo laiko ![]() duomen�.
Rezultat� tikslumas priklauso nuo pirminio skirtuminio tariamojo atstumo
nustatymo tikslumo ir nuo DOP reik�mi�, apskai�iuot� i�
aptartosios G matricos.[28]
duomen�.
Rezultat� tikslumas priklauso nuo pirminio skirtuminio tariamojo atstumo
nustatymo tikslumo ir nuo DOP reik�mi�, apskai�iuot� i�
aptartosios G matricos.[28]
25 pav. DGPS navigacija su vienu sinchrolitu.
6.5. Matavimai su vienu sinchrolitu.
Vienas sinchrolitas atspindintis keturi� GPS palydov� signalus gali b�ti panaudotas kaip visa CDGPS atramin� stotis. Toks sinchrolito panaudojimas reikalauja atskiro detalaus aptarimo, nes tokia konfig�racija yra paprastesn� ir pigesn� �rengti. 22 paveiksl�lyje kaip tik ir pavaizduota tokia sistema.
Trys palydov� signalai yra
pakankama, kad b�t� galima apskai�iuoti trimat� imtuvo
pad�t� sinchrolito at�vilgiu, kai tiksliai �inomas v�linimo
laikas ![]() . Ketvirtojo palydovo signalai reikalingi min�tam
v�linimo laikui apskai�iuoti. Papildomi atspind�ti signalai
u�tikrina RAIM funkcij�. Papildomi palydov� signalai taip pat
u�tikrina nepertraukiam� sistemos funkcionavim� praradus vien�
ar kelis palydov� signalus.
. Ketvirtojo palydovo signalai reikalingi min�tam
v�linimo laikui apskai�iuoti. Papildomi atspind�ti signalai
u�tikrina RAIM funkcij�. Papildomi palydov� signalai taip pat
u�tikrina nepertraukiam� sistemos funkcionavim� praradus vien�
ar kelis palydov� signalus.
Jei tiksliai �inomas ne�lio faz�s nevienareik�mi�kum� sprendinys, tas pats sinchrolitas gali b�ti panaudotas ir CDGPS centimetrinio tikslumo navigacijai.
Didelis tokios sistemos prana�umas yra ir tai, kad norint gauti CDGPS tikslumus pakanka vienintelio sinchrolito ir vieno imtuvo. Neb�tinos jokios papildomos duomen� perdavimo linijos ar antenos. Pats sinchrolitas vartotojo imtuvui gali transliuoti duomn� srautus 50-1000 bit� per sekund� sparta viename kanale.
6.6. Matavimai vienu palydovu
Sistema, kai naudojamasi tik vieno palydovo signalais yra atskiras sinchrolit� navigacijos pavyzdys. �prastin� GPS reikalauja, kad imtuvas gaut� signalus ma�iausiai i� keturi� palydov�. Netgi vieno sinchrolito sistemai reikia ma�iausiai trij� palydov� signal�. Ta�iau kalnuotose vietov�se ar miestuose su auk�tais dangorai�iais kartais ne�manoma gauti signalus i� daugiau kaip vieno palydovo. Taip nutinka d�l riboto dangaus ploto matomumo.
Trys ar daugiau sinchrolit�,
atitinkamai pastatyt� aplink dominant� plot� �galina
vartotojo imtuv� atlikti CDGPS matavimus remiantis vos vienu palydovu.
Ma�iausiai trys sinchrolitai turi atspind�ti vieno palydovo signalus ir
kiekvieno j� v�linimo laikas ![]() turi b�ti
tiksliai �inomas.
turi b�ti
tiksliai �inomas.
Sinchrolitai skirti tokiam darbui turi b�ti i�d�styti labai kruop��iai.
7. Eksperimentiniai skryd�iai
�ioje tiriamojo darbo ataskaitos dalyje bus �vertinamas centimetrinio lygio tupdymo sistemos tikslumas, taip pat ap�velgti realiame laike vykdyt� bandym� rezultatai. Daugelio eksperiment� metu buvo naudojamasi lazeriniais prietaisai, kad b�t� �manoma nustatyti navigacini� jutikli� tikslum�. III kategorijos t�pimams vienos p�dos lazerini� prietais� tikslumas yra pilnai patenkinamas. Ta�iau paai�k�jo, kad IBLS navigacini� jutikli� matavimo tikslumas daugeliu atveju pralenkia net lazerinius prietaisus. [28][31]
7.1. Centimetrinio lygio tikslumo kiekybinis �vertinimas
Sistemos centimetrinio lygio tikslumo kiekybinis �vertinimas n�ra tiesioginis, nes kol kas neegzistuoja kit� nepriklausom� pozicijos jutikli� (�skaitant lazerinius), galin�i� pakankamai tiksliai �vertinti vienos ar kitos sistemos veikim�. Ta�iau, galima pateikti dalin� priemoni�, naudot� �vertinti centimetrin� tikslum�, s�ra��:
Pozicij� tikrinimas pagal nepriklausom� GPS jutikli� statinius matavimus.
Nustatytos pozicijos dinaminis palyginimas naudojant GPS su IRU.
7.2. Pozicij� tikrinimas pagal nepriklausom� GPS jutikli� statinius matavimus
Naudojantis �iuo palyginimo metodu kinematiniai pseudolit� duomenys palyginami su statini� jutikli� matavim� rezultatais. Palyginimai vykdomi nusileidus orlaiviui. Visi matavimai atliekamai nustatyto kilimo-t�pimo tako tiksliai �inom� koordina�i� at�vilgiu. Taigi, kaip jau buvo ank��iau min�ta, toki� dviej� matavim� absoliutus tikslumas yra keli� centimetr� eil�s.
7.3. Nustatytos pozicijos dinaminis palyginimas naudojant GPS su IRU
�is palyginimo metodas tikrina santykin� orlaivio antenos pozicionavim� panaudojant GPS signalus (naudojami pirmiausiai kaip pad�ties nustatymo priemon�) it tok� pat dyd� i�matuot� nepriklausomos IRU sistemos.
�ios dvi palyginimo technikos- viena statin� ir absoliutin�; kita dinamin� ir santykin�- sujungtos tam, kad palaikyt� centimetrinio lygio tikslum� naudojant IBLS. Inercinis palyginimas yra vienintelis b�das �sitikinti, kad kinematinis matavimo metodas yra toks pat tikslus kaip ir statinis.
7.4. Piper Dakota eksperimentiniai skryd�iai
Visi �iame skyriuje apra�omi skryd�i� bandymai buvo atliekami naudojantis pseudolit� nenutr�kstamai siun�iamais signalais. Signal� stiprumo lygiai buvo labai kruop��iai koordinuojami atsi�velgiant � orlaivio skryd�io trajektorij�. Tai buvo daroma d�l to, kad i�vengti pseudolit� siun�iam� signal� interferencijos su palydov� signalais. Tiesioginis to rezultatas yra tai, kad �vyturi� signalai buvo pakankamai stipr�s detekcijai tik pseudolito veikimo hemisferin�je erdv�je. Tokie signal� lygi� apribojimai neatsiliep� IBLS sistemos darbui, nes bet kokie geometriniai pakitimai art�jimo t�pti metu yra atliekami t� hemisfer� viduje.
Viena galima tokios sistemos problema yra tai, kad imtuvas aptikti �vyturi� signalus keli� sekund�i� b�gyje i�kart po to, kai jie tampa pakankamai stipr�s detekcijai; kitu atveju bus nepastebima per didelis kiekis geometrijos pakitim� ir dviprasmi�kum� rezoliucijos procesas gali ne�vykti. Kita problema yra tai, kad skirtingai nuo ILS, IBLS sistemai pritaikytas orlaivis negali aptikti ant�emin�s �rangos signal� iki to laiko, kol jis ne�skrenda � pseudolit� veikimo zon�. Tai yra pats paskutinis t�pimo etapas. Tai n�ra problema techniniame lygmenyje, ta�iau pilotams sukelia didelius nepatogumus ir gali sukelti operacinius ir administracinius nepatogumus.
Paveiksl�lyje 4 parodytas Stanfordo Universitetui priklausantis Piper Dakota l�ktuvas, kuris ir buvo panaudotas daugelyje IBLS sistemos bandym�. Orlaivio registracijos numeris yra 4341 ir jis buvo pilnai modifikuotas, kad palaikyt� galimyb� skristi pagal GPS signalus. Ant orlaivio fiuzelia�o �rengtos i� viso 8 GPS antenos, 2 duomen� perdavimo antenos, taip pat standartin� ILS �ranga ir kt.
Reflektorius �rengtas ant orlaivio kylio galiuko. Tokia jo pad�tis leid�ia lazeriniams prietaisui i�matuoti orlaivio pozicij�. Lazerinis auk��iamatis �rengtas ant orlaivio pilvo. Toks gerai technine �ranga apr�pintas orlaivis buvo naudojamas daugelyje IBLS sistemos vystymo test�. Pirmiausiai du pseudolitai buvo �rengti Palo Alto oro uoste (PAO). Pirmieji skryd�i� testai papras�iausiai fiksavo ir �ra�in�jo duomenis i� orlaivio ir diferencini� imtuv�. V�liau apdorojant �iuos duomenis paai�k�jo, kad visas sistemos veikimas yra patikimas. V�liau sistemos technin� �ranga buvo papildyta duomen� perdavimo linija ir nauja programine �ranga.
Pirmieji realiame laike �vykdyti bandymai buvo atlikti 1993 met� liepos 23 dien�. Dakota praskrido pro �vyturi� veikimo zon� ir saugiai nusileido. �io bandymo galutiniai rezultatai parod� dviej� centimetr� paklaid�.
Sekantis testas buvo vykdomas t� pa�i� met� rugpj��io m�nes�. �� kart� orlaivio borto aparat�ra buvo papildyta lazeriniu auk��iama�iu, kurio pagalba buvo patvirtinta vertikalioji paklaida. Buvo atlikta penkiolika bandom�j� t�pim�. Pagrindinis skirtumas tarp IBLS nustatytos pozicijos ir lazerinio auk��iama�io duomen� buvo vos 1,5 centimetro, kai standartin� deviacija tesiek� 7 centimetrus. Lazerio absoliutus tikslumas buvo 5 centimetrai. [28]

26 pav. Pirmasis orlaivio t�pimas su IBLS sistema
Dar po keleto �rangos patobulinim�, tuo metu vadinama kinematin� GPS tupdymo sistema, buvo pasirengusi dar tikslesniems bandymams. NASA vadovyb� leido IBLS bandym� komandai atlikti eksperimentus agent�rai priklausan�iame oro uoste, kur buvo �rengta dviguba radaro ir lazerin� matavimo �ranga. Tikslas buvo i�matuoti dinamin� IBLS sistemos paklaid�, esant normalios skryd�io s�lygoms. Nustatytas lazerio tikslumas buvo apie vien� p�d�, o bandym� rezultatai ir buvo pana�aus dyd�io.
7.5. BEECHCRAFT KING AIR eksperimentiniai skryd�iai
Tuo metu, kai buvo atlikin�jami �ie eksperimentai, buvo naudojamasi griozdi�kais pseudolit� pirmtakais, reikalaujan�iais 110 kW energijos. Tok� galingum� plyname lauke buvo pakankamai sunku i�gauti. D�l to kilo noras panaudoti jau ank��iau apra�ytus nedidelius patobulintus pseudolitus. Tokie pseudolitai buvo dalis nauj� test� programos. �ie bandymai buvo atlikin�jami jau 1994 met� liepos m�nes� Niu D�ersyje. �i� bandym� metu IBLS pozicijos signalai buvo naudojami vesti orlaiv� beveiki iki pat kilimo t�pimo tako dangos. �i nauja IBLS versija buvo �rengta BEECHCRAFT KING AIR orlaivyje, priklausan�iame FAA. �i� bandym� metu, visi gauti navigaciniai duomenys buvo persiun�iami orlaiviui, kuriame jie b�davo konvertuojami � skaitmenin� avionikos �rangai suprantam� format� ir pateikiami autopilotui, kaip standartiniai ILS signalai.

27 pav. IBLS bandymai
Min�tojo orlaivio autopilotas buvo sukonstruotas sekti ILS signalus t�pimo metu pagal pirmos kategorijos apsisprendimo auk��io reikalavimus. Tai yra 200 p�d� auk�tyje pilotas turi apsispr�sti d�l nusileidimo ir perimti orlaivio valdym� � savo rankas.
Toks valdymo b�das buvo vadinamas automatinio sudvejinimo t�pimas. 1994 metais oficiali� bandym� metu buvo atlikta 49 tokie t�pimai naudojantis IBLS. Visi jie buvo s�kmingi. IBLS formuojami signalai buvo tokie patikimi, kad lak�nas bandytojas pagal �iuos signalus leido autopilotui kontroliuoti orlaivio valdym� net iki 20 p�d� auk��io. O tai jau vir�ija net III kategorijos reikalavimus. Visi lak�nai i�band� �i� sistem� vienbalsiai sutiko, kad IBLS yra �ymiai patikimesn� u� ILS.
Lazerinis orlaivio sekimas patvirtino prognozuot� IBLS tikslum�.
Skirtumai tarp IBLS ir lazerini� prietais� tikslum� vadinama
navigacini� jutikli� paklaida (NSE). ![]() NSE paklaidos i�ilgini�, skersini�
ir auk��io koordina�i� reik�m�s siek� 0.5 m, 0.3 m ir
0.6 m atitinkamai. [28]
NSE paklaidos i�ilgini�, skersini�
ir auk��io koordina�i� reik�m�s siek� 0.5 m, 0.3 m ir
0.6 m atitinkamai. [28]
7.6. BOEING 737 eksperimentiniai skryd�iai
�emiau esan�iame paveiksl�lyje pavaizduotas BOEING 737 orlaivis, kur� FAA i�sinuomavo i� Jungtini� Amerikos Valstij� avialinij�, siekdama IBLS sistemos tinkamum� tupdymui i�bandyti ir komerciniams orlaiviams. Buvo atlikta i� viso 110 pilnai automatini� t�pim� su �iuo orlaiviu. Visi jie buvo s�kmingi, i�skyrus vien�, kai t�pimas buvo nutrauktas padingus palydov� signalams. Ta�iau, IBLS s�kmingai aptiko �i� anomalij�.
Automatinio tupdymo sistemos turi saugiai nuvesti orlaiv� iki apibr�to ploto ant kilimo t�pimo tako. Paveiksl�lyje 8 pavaizduotos konkre�ios bandym� orlaivi� pri�em�jimo koordinat�s. Vis� 110 nusileidim� vietos turi tilpti � ICAO nustatyt� konkre�i� matmen� �d�ut�, kurioje yra 95% vis� nusileidim� atvej�. Ties� sakant, nubr�us tokio tipo d�ut� aplink IBLS sistemos bandym� nusileidim� ta�kus, min�tosios d�ut�s matmenys b�t� dvigubai ma�esni visose dimensijose. Visi �ie duomenys buvo gauti per keturias dienas vykusius bandymus. Vien� dien� �oninio v�jo stiprumas �ymiai vir�ijo automatinio tupdymo saugumo reikalavimus, ta�iau net ir tokiomis meteorologin�mis s�lygomis buvo saugiai nusileista. Tokie rezultatai tik �rodo IBLS sistemos potencial� tapti ateities orlaivi� tupdymo sistema.

28 pav. Vienas i� 110 automatini� BOEING 737 nusileidim�
Tokios tupdymo sistemos konfig�racija pavaizduota 7 paveiksl�lyje. Naudojama viena pora standartini� ARINC 743 GPS anten�, kurios sumontuotos ant orlaivio fiuzelia�o. TRIMBLE TANS GPS imtuvas priimtus navigacinius duomenis persiun�ia navigaciniam procesoriui. Faz�s matavim� duomenys sujungti su duomenimis atsi�stais labai auk�t� da�ni� radijo signal� perdavimo kanalais suteikia vis� reikiam� informacij�, kuri� IBLS sistema naudoja ypatingai tiksliems pad�ties nustatymo skai�iavimams. Tokie duomenys dar papildomi navigaciniais duomenimis gaunamais i� inercin�s sistemos.
29 pav. BOEING 737 IBLS borto �ranga
Navigacinis kompiuteris siun�ia analoginius signalus apie kurs� ir glisad� autopilotui.
30 pav. BOEING 737 nusileidim� dispersija
31 pav. Absoliutin� vertikalioji paklaida BEECHCRAFT KING AIR bandym� metu
8. Navigacinis sprendinys (dvimatis pavyzdys)
8.1. Simetrinio sprendinio pavyzdys, kai naudojami ant�eminiai si�stuvai
�iuo atveju imtuvas ir du si�stuvai yra i�d�styti vienoje
plok�tumoje. Si�stuv� koordinat�s ![]() ir
ir ![]() . Atstumai
. Atstumai ![]() ir
ir ![]() apskai�iuojami
taip:
apskai�iuojami
taip:
![]() (27)
(27)
�ia: ![]() - �viesos greitis;
- �viesos greitis; ![]() - laikas, per kur� pirmojo si�stuvo radijo signalai
nukeliauja iki pirmojo imtuvo;
- laikas, per kur� pirmojo si�stuvo radijo signalai
nukeliauja iki pirmojo imtuvo; ![]() - laikas, per kur� pirmojo si�stuvo radijo signalai
nukeliauja iki antrojo imtuvo;
- laikas, per kur� pirmojo si�stuvo radijo signalai
nukeliauja iki antrojo imtuvo; ![]() - imtuvo koordinat�s.
- imtuvo koordinat�s.
Atstumas iki kiekvieno si�stuvo i�rei�kiamas:
 (28)
(28)
![]() ir
ir ![]() i�skleidus Teiloro
eilute:
i�skleidus Teiloro
eilute:
 (29)
(29)
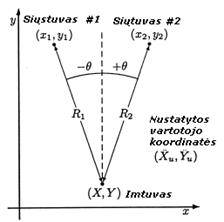
32 pav. Simetrinio sprendinio pavyzdys, kai naudojami ant�eminiai si�stuvai
Taigi, simetriniu atveju:
 (30)
(30)
Kad gautume minimali� kvadrat� sprendin� ![]() reikia atlikti tokius
skai�iavimus:
reikia atlikti tokius
skai�iavimus:
![]() (31)
(31)
Kai:
![]() (32)
(32)
Atlikus reikiamus skai�iavimus gaunami tokie sprendiniai:
 ;
; ![]() (33)
(33)
Navigacinio sprendinio radimo proced�ra
Tarkime, kad yra duotos si�stuv� koordinat�s ![]() ir
ir ![]() . Taip pat �inomi signal� sklidimo nuo
si�stuv� iki imtuv� laikai
. Taip pat �inomi signal� sklidimo nuo
si�stuv� iki imtuv� laikai ![]() ir
ir ![]() . U�duotis pakankamai paprasta- surasti imtuvo koordinates
. U�duotis pakankamai paprasta- surasti imtuvo koordinates ![]() ir
ir ![]() . Tarkime, kad imtuvo koordinat�s sutampa su
pradin�mis koordinat�mis:
. Tarkime, kad imtuvo koordinat�s sutampa su
pradin�mis koordinat�mis:
![]()
![]() ; (34)
; (34)
Apskai�iuojamos atstum� paklaidos:
 (35)
(35)
Apskai�iuojamas ![]() kampas:
kampas:
![]() arba
arba ![]() (36)
(36)
Surandamos imtuvo pad�ties korekcijos:
 (37)
(37)
Turint patais� reik�mes apskai�iuojamos naujos koordinat�s:
![]() ir
ir ![]() (38)
(38)
Korekcij� skai�iavimai atliekami pagal �ias i�rai�kas:
 (39)
(39)
Galiausiai korekcijos i�rei�kiamos paprastesne forma:
 (40)
(40)
8.2. Palydov� pasirinkimas ir tikslumo praradimo faktorius
Kaip ir ant�eminiu atveju, geresnis tikslumas pasiekiamas, kai si�stuvai yra pla�iai pasiskirst� erdv�je. Pavyzd�iui, jei atstum� matavimai atliekami keturi� � grupel� susitelkusi� palydov� at�vilgiu, i�matuotieji atstumai iki min�t�j� palydov� bus apytiksliai lyg�s. Toks efektas, atsirandantis d�l palydov� i�sid�stymo geometrijos vadinamas tikslumo praradimo faktoriumi (angl. DOP- Dilution of Precision). Tai rei�kia, kad ir kit� paklaid� dyd�iai (laiko skali� nesutapimai ir kt.) taip pat yra �takojami geometrinio faktoriaus. Siekiant i�siai�kinti geriausi� palydov� i�sid�stym�, kurio metu bus atliekami pad�ties nustatymo skai�iavimai, pirmiausiai b�tina apskai�iuoti DOP reik�mes. [2][ 24]
Trimat�s kiekvieno stebimo palydovo su �inomomis koordinat�mis (![]() ) ir ne�inomomis steb�tojo koordinat�mis (
) ir ne�inomomis steb�tojo koordinat�mis (![]() ) i�rai�kos atrodo taip:
) i�rai�kos atrodo taip:
![]() (41)
(41)
Tarkime, kad atstumo vektorius ![]() yra netiesin�
keturma�io vektoriaus
yra netiesin�
keturma�io vektoriaus ![]() funkcija,
iliustruojanti imtuvo pad�ties ir laiko skali� paklaidas. I�skleidus
Teiloro eilute gauname:
funkcija,
iliustruojanti imtuvo pad�ties ir laiko skali� paklaidas. I�skleidus
Teiloro eilute gauname:
![]() (42)
(42)
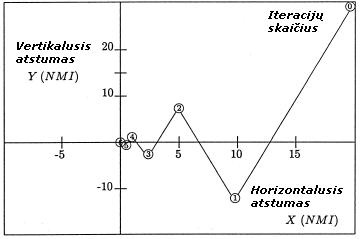
33 pav. Iteracij� rezultatai.
![]() - vartotojo antenos pad�ties rytinis komponentas;
- vartotojo antenos pad�ties rytinis komponentas;
![]() - vartotojo antenos pad�ties �iaurinis komponentas;
- vartotojo antenos pad�ties �iaurinis komponentas;
![]() - vartotojo antenos pad�ties vertikalusis komponentas;
- vartotojo antenos pad�ties vertikalusis komponentas;
![]() - imtuvo laiko paklaida;
- imtuvo laiko paklaida;
Toliau gauname:

![]() ,
, ![]() (43)
(43)
Toliau gauname:
(44)
![]() ,
, ![]() ,
, ![]() (45)
(45)
�ia ![]() - pirmasis Teiloro eilut�s narys.
- pirmasis Teiloro eilut�s narys.
 (46)
(46)
�ia: ![]() - imtuvo matavim� triuk�mai.
- imtuvo matavim� triuk�mai.
�io vektoriaus i�rai�ka gal�t� b�ti �ra�yta skaliarin�je formoje, kai i- palydovo numeris:
 (47)
(47)
 (48)
(48)
 (49)
(49)
�ia: i =1,2,3,4 (t.y. keturi palydovai).
Ta�iau, �ios i�rai�kos gali b�ti pateiktos ir matricos pavidalu:
 (50)
(50)
�i� nepatogi� i�rai�k� galime u�ra�yti supaprastinta simboline forma:
![]() (51)
(51)
Kad apskai�iuoti ![]() , mums reikia �inoti palydov� koordinates ir
apytikr� vartotojo imtuvo pad�t�:
, mums reikia �inoti palydov� koordinates ir
apytikr� vartotojo imtuvo pad�t�:
![]() (52)
(52)
Kad apskai�iuoti geometrinio tikslumo praradimo faktoriaus reik�m� (GDOP) mums reikia atlikti tokius skai�iavimus:
![]() (53)
(53)
![]() ir
ir ![]() yra �inomi i�
tariamojo atstumo, palydov� pad�ties ir vartotojo imtuvo
pad��i� skai�iavim�.
yra �inomi i�
tariamojo atstumo, palydov� pad�ties ir vartotojo imtuvo
pad��i� skai�iavim�. ![]() korekcijos vektorius
yra ne�inomas.
korekcijos vektorius
yra ne�inomas.
Jei paskutiniosios lygties abi puses padaugintume i� ![]() gautume:
gautume:
![]() (54)
(54)
Gaut� i�rai�k� dar kart� padaugin� i� ![]() gauname:
gauname:
![]() (55)
(55)
Paklaid� kovariacija:
 (56)
(56)
Tariam�j� atstum� matavim� kovariacija:
![]() (57)
(57)
Toliau gauname:
 ( 58)
( 58)
Kai:
 (59)
(59)
Ir:

Tokiu atveju kovariacin� matrica �gauna tok� pavidal�:
 (60)
(60)
I� gautos matricos mus konkre�iai domina tik �stri�ain�s elementai:
 (61)
(61)
�ia:
![]() (geometrinis DOP) (62)
(geometrinis DOP) (62)
![]() (pad�ties DOP) (63)
(pad�ties DOP) (63)
![]() (horizontalusis DOP) (64)
(horizontalusis DOP) (64)
![]() (vertikalusis
DOP) (65)
(vertikalusis
DOP) (65)
![]() (laiko
DOP) (66)
(laiko
DOP) (66)
8.3. Tipi�ko GDOP skai�iavimo pavyzdys. Keturi� palydov� atvejis
Geriausias matavim� tikslumas gaunamas, kai stebimi trys minimalu kampu vir� horizonto pakil� palydovai, o ketvirtasis yra zenite.
|
Palydovo pad�tis |
||||
|
Vietos kampas | ||||
|
Azimutas | ||||
Tokio palydov� i�sid�stymo geometrijos atveju ![]() reik�m�s gaunamos
tokios:
reik�m�s gaunamos
tokios:
 (67)
(67)
Tokio atvejo GDOP skai�iavimo pavyzdys:
 (68)
(68)
8.4. GPS nustatytos pad�ties duomen� transformavimas
Atramin� koordina�i� sistema naudojama GPS matavimuose vadinama ECEF (Earth centered- Earth fixed). �ioje koordina�i� sistemoje panaudojamos trimat�s XYZ koordinat�s (metrais), apra�an�ios GPS palydovo arba imtuvo pad�t�. S�voka ��em�s centro� rei�kia, kad koordina�i� sistemos prad�ia sutampa su �em�s masi� centru (0,0,0). S�voka �susieta su �em�s centru� rei�kia, kad koordina�i� sistemos a�ys yra susietos su tam tikrai �em�s ta�kais ir sukasi kartu su ja aplink Z a��. XY plok�tuma sutampa su ekvatoriaus plok�tuma. [22][25]
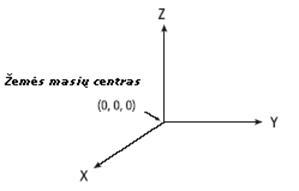
34 pav. ECEF koordina�i� sistemos a�ys.
D�l sud�tingos �em�s formos (reljefo nelygumai) yra b�tinas paprastas, bet tuo pa�iu ir pakankamai tikslus �em�s pavir�i� apra�antis aproksimavimo metodas. Atramini� elipsoid� panaudojimas suteikia galimyb� ECEF koordinates paversti � priimtinesnes koordinates, apra�ant jas kaip ilgum�, platum� ir auk�t� (LLA).
Atraminis elipsoidas gali b�ti apib�dintas visa eile parametr�, apibr�ian�i� jo form�. Ta�iau, pagrindiniai parametrai yra didysis ir ma�asis pusa�iai, pirmasis ekscentricitetas ir antrasis ekscentricitetas. �ie pagrindiniai parametrai parodyti 35 paveiksl�lyje. Priklausomai nuo situacijos, kartais gali b�ti naudojamas ir elipsoido plok�tum� nusakantis parametras f.
Visuotin�ms reikm�ms GPS sistema naudoja WGS-84 koordina�i� sistem�. �ios koordina�i� sistemos prad�ia sutampa su ECEF koordina�i� sistemos prad�ia. X a�is kerta Grinvi�o juost� (ilguma- 0�), o XY a�ys sutampa su ekvatoriaus plok�tuma (platuma- 0�). Auk�tis i�rei�kiamas kaip statmuo � elipsoido pavir�i�, ta�iau auk��io nereik�t� painioti su duomenimis nuo j�ros lygio.
8.5. Koordina�i� transformavimas tarp ECEF ir LLA. Vertimas i� LLA � ECEF
Koordina�i� duomen� pervertimas i� vienos koordina�i� sistemos � kit� atliekamas � pagalb� pasitelkiant paprastas matematines formules. �iems duomen� pervertimams galima naudoti ir iteracij� metodus. Pagrindin�s matematin�s formul�s, kuri� pagalba atliekamai duomen� transformavimai:
 (69)
(69)
�ia:
![]() - platuma,
- platuma, ![]() - ilguma, h-
auk�tis vir� elipsoido (metrais), N-
kreivumo spindulys metrais, i�rei�kiamas kaip:
- ilguma, h-
auk�tis vir� elipsoido (metrais), N-
kreivumo spindulys metrais, i�rei�kiamas kaip: ![]() .[25][26]
.[25][26]
WGS-84
parametrai: 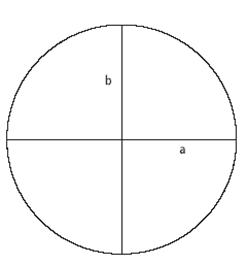
35 pav. Elipsoido parametrai.
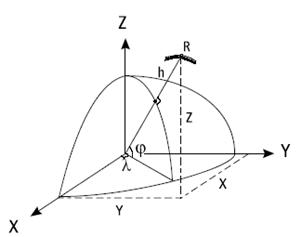
36 pav. ECEF ir atraminis elipsoidas
8.6. Vertimas i� ECEF � LLA
Koordina�i� vertimas i� ECEF � LLA yra kur kas sud�tingesnis
negu ank��iau aptartasis variantas. Tokiems koordina�i�
transformavimams naudojami keli metodai. Pirmasis metodas- iteracij�
metodas. Skai�iavimai pradedami nuo ![]() .
.
![]() (70)
(70)
Pradedama nuo ![]()
![]() (71)
(71)
Kartojama ![]() ir h
ir h
 (72)
(72)
Kitas metodas yra panaudoti paprastas matematines formules.
 (73),(74),(75)
(73),(74),(75)
�ia papildom� kintam�j� reik�m�s yra:
 (76), (77)
(76), (77)
8.7. GPS auk��iai
GPS matavim� metu nustatyti auk��iai yra susieti su auk��iu vir� atraminio elipsoido. Tokie matavim� rezultatai negali b�ti mai�omi su auk��iu vir� j�ros lygio. Auk��io duomenys susij� nuo j�ros lygio (dar vadinama geoidu) yra gaunami kur kas sud�tingesniu b�du. Tokiems duomenims gauti reikalingi tiksl�s duomenys apie �em�s gravitacij� duotame pavir�iaus ta�ke. WGS-84 elipsoidas aproksimuoja atramin� geoid� visame pasaulyje su ne didesniu kaip 100 metr� tikslumu. Transformacijos tarp �i� dviej� pavir�i� pavaizduotos 37 paveiksl�lyje.
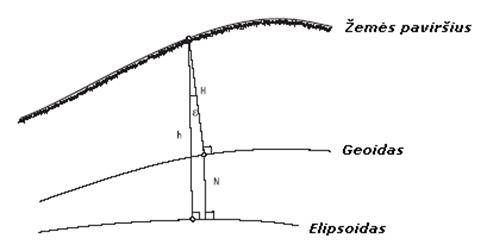
37 pav. Ry�ys tarp atraminio elipsoido, geoido ir �em�s pavir�iaus.
Duomen� pervertimas i� vienos atramin�s sistemos � kit� gali b�ti atliekamas:
![]() (78)
(78)
�ia: h- elipsoidinis auk�tis
(geodezinis), H- ortometrinis auk�tis
(auk�tis nuo j�ros lygio), N-
geoido banguotumas, ![]() - vertikal�s nuokrypis.
- vertikal�s nuokrypis.
Nors transformavimas tarp skirting� auk��i� yra nesud�tingas, tikslumas, kai banguotumas N yra ne�inomas, gali keistis labai pla�iose ribose. Tokia problema ypa� aktuali kalnuotose vietov�se, kur mas�s pasiskirstymas gali keistis �uoli�kai. [26]
8.8. Koordina�i� transformavimas tarp skirting� atramini� sistem�
Pasaulyje dabar naudojama labai daug atramini� elipsoid�. Taip yra d�l labai paprastos prie�asties. Pasirenkant kit�, ne WGS-84 atramin� elipsoid� siekiama suma�inti vietinius skirtumus tarp geoido ir elipsoido. 3 lentel�je pateikiama keletas atramini� elipsoid�, naudojam� pasaulyje.
3 lentel�. Atraminiai elipsoidai
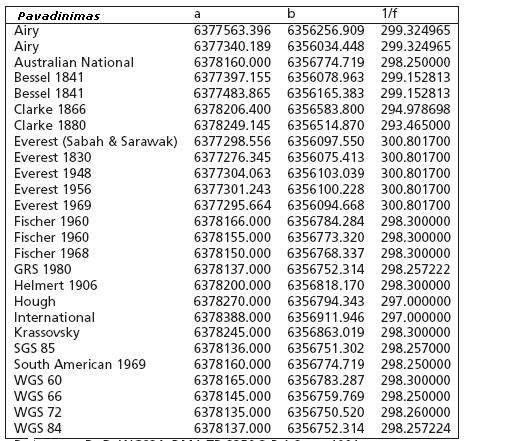
8.9. Duomen� vertimas
Dauguma pasaulyje naudojam� koordina�i� sistem� remiasi elipsoidais, kuri� parametrai pavaizduoti 3 lentel�je. Ta�iau, �ios koordina�i� sistemos prad�ios neb�tinai sutampa. Taip yra tod�l, kad �em�s masi� centras ir ECEF koordina�i� sistema nesutampa su elipsoido centru. Tokia pad�tis reikalauja speciali� duomen� transformavimo metod�, reikaling� skai�iuojant geodezin� pad�t� ir grei�ius. Siekiant ECEF koordinates paversti � geodezines koordinates reikia atlikti tokius veiksmus:
 (79)
(79)
8.10. Palydovini� sistem� �diegimo Vilniaus Tarptautiniame oro uoste galimyb�s ir ribojan�i� faktori� analiz�
Kaip jau buvo min�ta ankstesniuose skyriuose, egzistuojan�iomis pavien�mis palydovin�mis sistemomis � amerikie�i� GPS, rus� GLONASS, Europos GALILEO, kol kas negalima remtis kaip patikimomis pad�ties nustatymo orlaiviui tupiant, sistemomis. D�l jonosferos rei�kini�, oro uosto geografin�s pad�ties ir kit� prie�as�i� pozicijos koordinat�s gaunamos su nema�a paklaida. Juolab, kol kas iki galo nei�spr�stas nuolatinio kokybi�ko ry�io su reikiamu palydov� skai�iumi klausimas.
8.11. Tikslumo praradimo faktorius
GPS matavim� tikslumas priklauso nuo daugyb�s faktori�. Net naudojantis vien standartine SPS paslauga (Standard Position Service) atsakymas bus tas pats- tikslum� lemia daugyb� faktori�.
Nustatant SPS, matavim� tikslumas gaunamas minimalaus galimo lygio ribose, tai yra, tikslumas bus ne blogesnis nei numatytas tam tikras lygis konkre�iu laiko momentu. Bet kuriame �em�s pavir�iaus ta�ke matavim� tikslumas horizontalioje plok�tumoje bus lygus arba ma�esnis u� 100 metr� (kai �jungta SA). Tai rei�kia, kad per 24 valand� period� i�matuotos GPS koordinat�s bus ne toliau kaip per 100 metr� nuo tikr�j� ta�ko koordina�i�. Atitinkamas vertikalusis tikslumas- 156 metrai, o laiko tikslumas- 340 nanosekund�i�.
Tokie duomenys turi b�ti, kai orbitoje veikia visi 24 palydovai, ap�valgos auk��io ribotumas siekia 5� be papildom� trukd�i�, gaunami nenutr�kstantys signalai, ma�iausiai, i� 4 palydov�, kuri� geometrinis tikslumo praradimo faktorius ne didesnis kaip 6. Taigi, i� to seka, kad, priklausomai nuo steb�jimo pad�ties arba nuo paros laiko, kis ir matavim� tikslumai. Kalnuotose vietov�se arba miestuose su auk�tais pastatais galime susidurti su situacija, kai tiesioginio matomumo zonoje nebus reikiam� keturi� palydov� arba PDOP (angl. �Position Dilution Of Precision�) bus �ymiai didesnis u� 6.
Realaus tikslumo nepastovumas priklausomai nuo steb�jimo ta�ko koordina�i� arba paros laiko, yra dominuojantis tikslumo praradimo efektas d�l geometrinio faktoriaus. �io faktoriaus sandauga su matavim� paklaidomis ir kitomis paklaidomis duoda bendr�j� koordina�i� paklaid�.
8.12. Geometrija
�sivaizduokime navigacin� sistem�, kurioje vienas imtuvas matuoja atstumus iki dviej� ant�emini� si�stuv�. Matavimai atliekami norint nustatyti imtuvo plok�tumines koordinates. Imtuvas pastatytas ta�ke, apibr�tame dviej� apskritim� sankirta. Min�t�j� apskritim� centrai sutampa su si�stuv� koordinat�mis (�r. 1 paveiksl�l�). Kaip matome imtuvo matavimuose yra �ioks toks netikslumas. Neteisingai (netiksliai) i�matuotas atstumas iki si�stuv� daro neigiam� poveik� ir koordina�i� skai�iavimams.[30]
38 pav. Si�stuv� pad�ties �taka matavimo tikslumui.
(1a) paveiksl�lyje si�stuvai i� imtuvo �matomi� ~90� kampu. Tokia j� pad�tis suteikia palyginus nedidel� pad�ties reik�mi� nustatymo plot�, kuriame tur�t� b�ti imtuvas. Abu si�stuvai yra simetri�kai prie�ingose imtuvo at�vilgiu pus�se, tad imtuvo X ir Y koordinat�s bus apskai�iuojamos su vienodu tikslumu. (1b) paveiksl�lyje si�stuvai imtuvo at�vilgiu yra i�d�styti ma�esniu kampu, kas savo ruo�tu duoda �ymiai didesn� galim� sprendim� plot�. Tokiu atveju imtuvo Y koordinat�s bus apskai�iuojamos su ma�esniu tikslumu negu X koordinat�s.
Analogi�kai geometrijos �takos efekt� galima i�analizuoti ir GPS sistemai.
8.13. Vartotojo tikslumo paklaida (UERE)
UERE- (angl. �User Equivalent Range Error�). Kaip �inome i� GPS veikimo
princip�, dydis ![]() apib�dinamas kaip
tariam�j� atstum� matavim� standartin� paklaida.
apib�dinamas kaip
tariam�j� atstum� matavim� standartin� paklaida.
SPS re�ime pilnoji UERE paklaida yra apie 25 metrus. Ta�iau, i�jungus SA funkcij�, UERE paklaida suma��jo iki 5 metr�. Did�i�j� jos reik�m�s dal� sudaro paklaidos, atsirandan�ios d�l jonosferos v�linimo ir paklaidos, atsirandan�ios d�l signal� atspind�i�. Vartotojai, besinaudojantys dviej� da�ni� imtuvu, turi galimyb� i� tariam�j� atstum� matavim� pa�alinti paklaidas, atsirandan�ias d�l jonosferos �takos. Tokiu b�du dar labiau suma�inama UERE paklaida. Ateityje, naudojant papildom� civilin� GPS ne�ant�j� da�n�, visi vartotojai tur�s vienodas galimybes kompensuoti jonosferos paklaidas.
8.14. �vair�s tikslumo praradimo faktoriai (DOP)
Turint ![]() reik�m�, galime
apskai�iuoti
reik�m�, galime
apskai�iuoti ![]() matricos komponentus.
Atlikus visus skai�iavimus, tampa �manoma �vertinti bendr�
vidutini� kvadrat� sprendinio tikslum�. Tai atliekama tokiu
b�du:
matricos komponentus.
Atlikus visus skai�iavimus, tampa �manoma �vertinti bendr�
vidutini� kvadrat� sprendinio tikslum�. Tai atliekama tokiu
b�du:
![]() (80)
(80)
�ia: ![]() ,
, ![]() ,
, ![]() - imtuvo koordina�i� �vertinimo rytinio,
�iaurinio ir vertikalaus komponent� dispersija,
- imtuvo koordina�i� �vertinimo rytinio,
�iaurinio ir vertikalaus komponent� dispersija, ![]() - imtuvo laiko skal�s dispersija. Jeigu sprendinio
algoritmas parametrizuotas sta�iakamp�je koordina�i�
sistemoje, vietin�je koordina�i� sistemoje naudojamas
tiesioginis kovariacin�s matricos sprendini� transformavimo metodas.
�is sprendinio tikslumo �vertinimas tapatus tariamojo atstumo matavimui.
Matricos D elementai- tai funkcija priklausanti nuo tarpusavio geometrijos tarp
palydovo ir imtuvo. Mastel� �vertinantis koeficientas paprastai
b�na didesnis u� 1. �is koeficientas padidina matavim� paklaid�,
tuo pa�iu suma�indamas koordina�i� apskai�iavimo
tikslum�. D�l �ios prie�asties �is mastel� nusakantis
koeficientas paprastai vadinamas geometriniu tikslumo suma��jimu (GDOP).
- imtuvo laiko skal�s dispersija. Jeigu sprendinio
algoritmas parametrizuotas sta�iakamp�je koordina�i�
sistemoje, vietin�je koordina�i� sistemoje naudojamas
tiesioginis kovariacin�s matricos sprendini� transformavimo metodas.
�is sprendinio tikslumo �vertinimas tapatus tariamojo atstumo matavimui.
Matricos D elementai- tai funkcija priklausanti nuo tarpusavio geometrijos tarp
palydovo ir imtuvo. Mastel� �vertinantis koeficientas paprastai
b�na didesnis u� 1. �is koeficientas padidina matavim� paklaid�,
tuo pa�iu suma�indamas koordina�i� apskai�iavimo
tikslum�. D�l �ios prie�asties �is mastel� nusakantis
koeficientas paprastai vadinamas geometriniu tikslumo suma��jimu (GDOP).
Be bendrojo sprendinio kokyb�s �vertinimo mums dar gali prireikti ir atskir� komponent� tikslum� �vertinimo (trimat�s koordinat�s ir laiko nesutapimai). Kad b�t� gauti atskir� netikslum� �vertinimai, atliekami tokie skai�iavimai:
![]() (81)
(81)
Kiekvienam �i� paklaid� matavimui mes galime nusistatyti atitinkamus DOP dyd�ius (horizontaliai ir vertikaliai koordina�i� dedamajai ir laikui):
![]()
![]() (82)
(82)
![]() (83)
(83)
Svarbu pamin�ti, kad ![]() ir
ir ![]() . �ios i�rai�kos labai praver�ia siekiant i�siai�kinti
tarpusavio s�ry�ius tarp �vairi� DOP. Kadangi �vair�s
DOP yra funkcijos, priklausan�ios nuo imtuvo ir palydov� tarpusavio
pad�ties , jie gali b�ti apskai�iuoti panaudojus palydov�
almanach� bet kokiam palydov� rinkiniui, matomam i� ta�ko, kurio
at�vilgiu atliekami skai�iavimai.
. �ios i�rai�kos labai praver�ia siekiant i�siai�kinti
tarpusavio s�ry�ius tarp �vairi� DOP. Kadangi �vair�s
DOP yra funkcijos, priklausan�ios nuo imtuvo ir palydov� tarpusavio
pad�ties , jie gali b�ti apskai�iuoti panaudojus palydov�
almanach� bet kokiam palydov� rinkiniui, matomam i� ta�ko, kurio
at�vilgiu atliekami skai�iavimai.
Jei imtuvas-palydovas vektoriai yra vienoje plok�tumoje, DOP bus be galo didelis. Fakti�kai, esant tokiam palydov� i�sid�stymui yra ne�manomas koordina�i� matavimas. DOP reik�m�s bus �ymiai ma�esn�s (o tuo pa�iu padid�s ir matavim� tikslumas), kai palydovai bus i�sibarst� po vis� dang�.
8.15. HDOP ir VDOP palyginimas
Paprastai, kuo daugiau palydov� signal� naudojama skai�iavimuose, tuo ma�esn� gaunama DOP reik�m�, o tuo pa�iu gaunamos ma�esn�s paklaidos. �emiau pateikti paveiksl�liai iliustruojantys DOP reik�mes paros b�gyje vir� Vilniaus oro uosto. Paprastai HDOP reik�m�s svyruoja tarp 1 ir 2. VDOP reik�m�s b�na didesn�s u� HDOP reik�mes, tad ir vertikali� koordina�i� nustatymo tikslumas b�na ma�esnis u� horizontali� koordina�i�. Toks efektas gaunamas tod�l, kad palydovai, i� kuri� gauname signal�, yra auk��iau imtuvo. Horizontali� koordina�i� nustatymas nesusiduria su tokiu efektu, nes paprastai signalus gauname i� palydov�, esan�i� skirtingose pus�se.
Jei �em�s pavir�ius b�t� permatomas radijo signalams, vertikali�j� dedam�j� gal�tum�me nustatin�ti tokiu pa�iu tikslumu kaip ir horizontali�j�. Vertikali� matavim� tikslum� galima padidinti naudojant GPS imtuv� su labai tiksliu laikrod�iu, arba jei labai tiksliai �inomas laiko skali� nesutapimas tarp vartotojo ir GPS palydovo.
DOP dyd�iui �tak� daro ir steb�tojo geografin�s pad�ties platuma. Nesutapimai tarp HDOP ir VDOP labiau i�ry�k�ja �iauriausiose ir pie�iausiose planetos platumose. Taip yra d�l to, kad tose vietose stebima labai ma�ai zenite esan�i� palydov�. Tokie apribojimai atsiranda d�l to, kad GPS palydov� orbit� polinkis sudaro apie 55�, o tai rei�kia, kad niekada nepamatysite vir� sav�s palydovo, jei esate �iauriau arba pie�iau 55�. �iaur�s ir piet� poliuose auk��iausias galimas palydovo vietos kampas yra 45�.
Taigi, kaip matome, Lietuvoje dar galima tik�tis neblog� VDOP rezultat�.
Jei steb�jimo vietos kamp� apribotume iki 15� ir tuo metu steb�ti tik keturis palydovus (tuos, kurie u�tikrina ma�iausias DOP reik�mes), mes pasteb�sim, kad tuo metu, kai HDOP reik�m� tesiekia dyd�ius nuo vieno iki dviej�, VDOP reik�m� gali pakilti iki 7. tai nekeista, nes galime apdoroti tik t� palydov� signalus, kurie pakil� vos per 30 laipsni�. Ar blogai yra tur�ti toki� VDOP reik�m�? Jei UERE paklaida siekia 25 metrus, vidutin� kvadratin� vertikalioji paklaida tur�t� b�ti apie 175 metrus. Suma�inus steb�jimo vietos kampo rib� iki 5 laipsni�, VDOP suma��ja net kelis kartus.
Ta�iau didel� DOP reik�m� gali b�ti pasiekta ir vidutin�se platumose. Tai gali atsitikti tiems imtuvams, kurie gali steb�ti visus matomus palydovus. Kai kuriose vietov�se (pavyzd�iui mi�kingose) GPS imtuvo antena d�l i�kilusi� kli��i� negali priimti signal� i� vis� pusi�. Jei priimame signal� tik i� apriboto dangaus ploto, DOP reik�m� bus didel�, matavim� tikslumas ma�as.
4 lentel�. DOP reik�mi� �vertinimai
|
DOP |
�vertinimas |
Apra�ymas |
|
Idealus |
Tai auk��iausias �manomas DOP lygis. |
|
|
Puikus |
�io lygio pad�ties matavimai yra pakankamai tiksl�s, kad patenkint� beveik visus vartotojus |
|
|
Geras |
Minimalus lygis reikalingas atlikti svarbius matavimus |
|
|
Vidutinis |
Galimi pad�ties matavimai. Atraminiai ta�kai tur�t� b�ti matuojami papildomai |
|
|
Paken�iamas |
Pad�ties nustatymas gali b�ti atliekamas tik tuo atveju, jei toleruojamas didelis netikslumas |
|
|
Blogas |
Pad�tis gali keistis per futbolo aik�t�s dyd� (ir daugiau). |
9. GPS matavim� paklaidos Vilniaus oro uosto zonoje
Siekiant i�siai�kinti palydovini� sistem� panaudojimo galimybes orlaivi� tupdymo sistemoms Lietuvoje, specialia programine �ranga (TRIMBLE OFFICE) buvo atlikta dviej� tip� modeliavimai. Pirmuoju atveju buvo nustatoma matom� palydov� skai�ius ir DOP reik�m�s vien tik GPS sistemai. Antruoju atveju tie patys skai�iavimai buvo atlikti integruotai GPS ir GLONASS sistemai. I� paveiksl�liuose pateikt� rezultat� galima padaryti i�vad�, kad orlaivi� tupdymui kur kas geriau pritaikyti integruot� GPS ir GLONASS sistem�. Tokiu atveju stebim� palydov� skai�ius kai kuriuose paros intervaluose padid�ja iki 14. Tuo pa�iu suma�inamos DOP reik�m�s, o tai savo ruo�tu padidina matavim� tikslum�.[3][2][25]
Visi steb�jimai buvo atliekami 2005 baland�io 7 dien�. Pirmiausia buvo nustatytas matom� palydov� skai�iaus kitimas paros b�gyje. 40 paveiksl�lyje parodytas matom� GPS ir GLONASS palydov� skai�iaus kitimas priklausomai nuo paros laiko.
41 paveiksl�lyje pateikiamos konkre�i� DOP diagramos. Nesunku pasteb�ti, kad, padid�jus matom� palydov� skai�iui, �ymiai suma��ja DOP reik�m�s. Tokiu b�du gaunami tikslesni matavim� rezultatai.
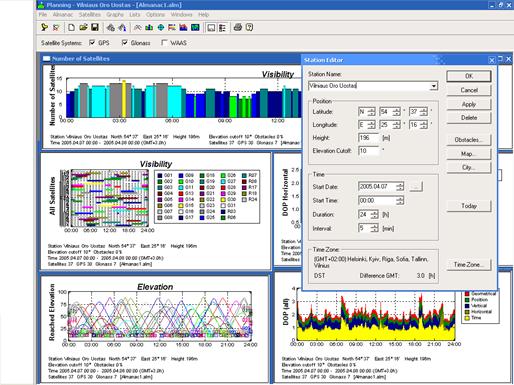
39 pav. Pagrindinis TRIMBLE OFFICE programos darbo langas ir steb�jim� ta�ko koordina�i� pasirinkimas.
40 pav. Matom� GPS ir GLONASS palydov� skai�iaus kitimas vir� Vilniaus paros b�gyje. 1 kreiv� rodo bendr� GPS ir GLONASS palydov� skai�i�, 2 kreiv� rodo tik GPS palydov� skai�i�.
41 pav. Konkre�ios DOP reik�m�s Vilniaus oro uostui 2005 04 07.
a) VDOP reik�mi� priklausomyb� nuo paros laiko (tik GPS)
b) HDOP reik�mi� priklausomyb� nuo paros laiko (tik GPS)
c) PDOP reik�mi� priklausomyb� nuo paros laiko (tik GPS)
d) VDOP reik�mi� priklausomyb� nuo paros laiko (GPS su GLONASS)
e) HDOP reik�mi� priklausomyb� nuo paros laiko (GPS ir GLONASS)
f) PDOP reik�mi� priklausomyb� nuo paros laiko (GPS ir GLONASS)
9.1. Pseudolito pad�ties Vilniaus Tarptautiniame oro uoste parinkimas
Kaip jau buvo min�ta ankstesniuose skyriuose, pseudolito �rengimas oro uosto zonoje �ymiai padidina navigacini� matavim� tikslum�. I�siai�kinus paros b�gyje matom� navigacini� palydov� skai�i� vir� Vilniaus oro uosto, tapo ai�ku, kad be papildom� tikslum� gerinan�i� priemoni�, orlaivi� tupdymas remiantis palydovin�mis sistemomis b�t� ne�manomas. Vien tik GPS sistemos teikiamas matavim� tikslumas tenkina tik art�jimo t�pti pagal pirm� kategorij� reikalavimus. Vertikaliojo matavim� d�mens tikslumas n� i� tolo neprilygsta ICAO reikalavimams. Tad, siekiant palydovines sistemas pritaikyti orlaivi� tupdymui Vilniaus oro uoste, visi�kai suprantama b�tinyb� �rengti vien� ar kelet� pseudolit�.
�ios darbo dalies tikslas buvo i�siai�kinti, kokio tikslumo galima tik�tis i� GPS sistemos papildant j� ant�eminiais pseudolitais, �rengtais �alia Vilniaus oro uosto. Pagal ankstesniuose skyriuose aptart� DOP skai�iavimo metodik�, MatLab terp�je buvo sudarytas specialus algoritmas, skai�iuojantis geometrinio tikslumo praradimo faktoriaus reik�mes priklausomai nuo palydov� ir imtuvo tarpusavio pad�ties. Tas pats algoritmas pritaikytas ir palydov� bei pseudolito atvejui.
Skai�iavim� algoritmas
clc
format short e
% Vercia LLA koordinates i ECEF koordinates
platstart=54.45694444 %platumos koordinaciu pradzia
platpab=54.81138889 %platumos koordinaciu pabaiga
hhh=25.4125
for ggg=platstart:0.01107639:platpab %platumos koordinates keiciamos ciklo pagalba
platuma=ggg
ilguma=hhh
n=6378137/sqrt(1-0.006694^2*sin(platuma)*sin(platuma)) %surandama N reiksme
x1=(n+100)*cos(platuma)*cos(ilguma) %ECEF koordinaciu sistemos X koordinate
y1=(n+100)*cos(platuma)*sin(ilguma) %ECEF koordinaciu sistemos Y koordinate
z1=(0.993306*n+100)*sin(platuma) %ECEF koordinaciu sistemos Z koordinate
siust(1,1:3)=[-3647600.556, 5168011.793, 958811.6497]; % metrai
siust(2,1:3)=[107648.4202, -2595944.864, 5827564.679]; % metrai
siust(3,1:3)=[x1, y1, z1]; % metrai
siust(4,1:3)=[3989323.447, 586539.2846, 4950748.984]; % metrai
% GPS imtuvo koordinates
imtuv(1,1:3)=[-2065252.171, -333950.7922, -6005170.944]; % metrai
% Pseudo-Atstumai
for i=1:4
r(i)=sqrt((veh(i,1)-rcvr(1,1))^2 + (veh(i,2)-rcvr(1,2))^2 + (veh(i,3)-rcvr(1,3))^2);
Dx(i)=(siust(i,1)-imtuv(1,1))/r(i);
Dy(i)=(siust(i,2)-imtuv(1,2))/r(i);
Dz(i)=(siust(i,3)-imtuv(1,3))/r(i);
Dt(i)=-1;
end
% Sudaroma kovariacine matrica
A=zeros(4);
for n=1:4
A(n,1)=Dx(n);
A(n,2)=Dy(n);
A(n,3)=Dz(n);
A(n,4)=Dt(n);
end
B=transpose(A);
C=B*A;
D=inv(C)
% Suskaiciuojamos DOP reiksmes is kovariacines matricos
GDOP=sqrt(D(1,1) + D(2,2) + D(3,3) + D(4,4))
PDOP=sqrt(D(1,1) + D(2,2) + D(3,3))
HDOP=sqrt(D(1,1) + D(2,2))
VDOP=sqrt(D(3,3))
[ilguma,platuma, GDOP, HDOP, VDOP]
end
end
Sudarius algoritm�, programoje GPS2.4 buvo surastos palydov� koordinat�s. Jos EXEL pakete sudarytos programos pagalba buvo ver�iamos � ECEF koordina�i� sistem� ir kaip pradiniai duomenys keliami � MatLab terp�. Kad i�siaiskinti geriausi� vieno pseudolito pastatymo viet�, visa Vilniaus oro uostui artima zona buvo padalinta � atskirus sektorius. Kiekvienas sektorius vienas nuo kito buvo atskirtas keturiasde�imties sekund�i� intervalais. Toks intervalas atitinka 1200 metr�. 42 paveikslas iliustruoja pseudolito vietos parinkimo skai�iavimo metodik�. Ta�kais pa�ym�tos vietos, kuri� koordinat�s buvo panaudotos HDOP ir VDOP reik�mi� skai�iavimams. Imtuvo koordinat�s vis� skai�iavim� metu nekito ir buvo ant KTT �iaurinio slenks�io. Imtuvo pad�tis pa�ym�ta rodykle.
42 pav. Galimi skai�iavimuose naudoti pseudolito pad�ties ta�kai.
Visi skai�iavimai buvo atliekami keliais ciklais. Kaip kintamieji buvo nurodomos platumos koordinat�s, kintan�ios nurodytame intervale tam tikru �ingsniu (kas 40 sekund�i�). V�liau pakei�iamos ilgumos koordinat�s ir ciklas kartojamas i� naujo. I� viso buvo atlikta 18 ilgumos koordina�i� keitimo cikl� po 32 nuosekliai kintan�ias platumos koordinates. Taigi, buvo apskai�iuotos 576 galimos vieno pseudolito pastatymo vietos. Gautos atskiros HDOP ir VDOP reik�m�s tur�jo pad�ti i�sirinkti geriausi� pseudolito pastatymo viet�. Toliau pateikiami skai�iavimo rezultatai grafik� pavidalu. Kaip matome, einant i� piet� � �iaur� VDOP reik�m�s ma��ja, o HDOP did�ja.
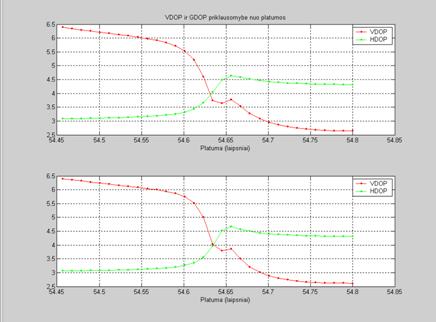
43 pav. HDOP ir VDOP priklausomyb� nuo platumos esant ![]() E (vir�utinis grafikas) ir
E (vir�utinis grafikas) ir ![]() E (apatinis grafikas) ilgumoms
E (apatinis grafikas) ilgumoms
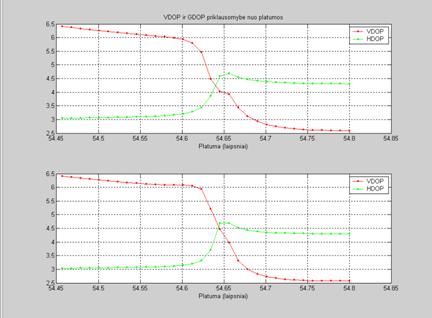
44 pav. HDOP ir VDOP priklausomyb� nuo platumos esant ![]() E (vir�utinis grafikas) ir
E (vir�utinis grafikas) ir ![]() E (apatinis grafikas) ilgumoms
E (apatinis grafikas) ilgumoms
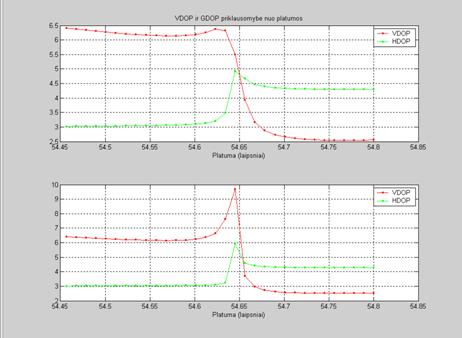
45 pav. HDOP ir VDOP priklausomyb� nuo platumos esant ![]() E (vir�utinis grafikas) ir
E (vir�utinis grafikas) ir ![]() E (apatinis grafikas) ilgumoms
E (apatinis grafikas) ilgumoms
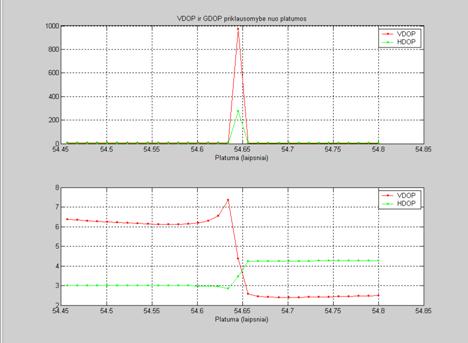
46 pav. HDOP ir VDOP priklausomyb� nuo platumos esant ![]() E (vir�utinis grafikas) ir
E (vir�utinis grafikas) ir ![]() E (apatinis grafikas) ilgumoms
E (apatinis grafikas) ilgumoms
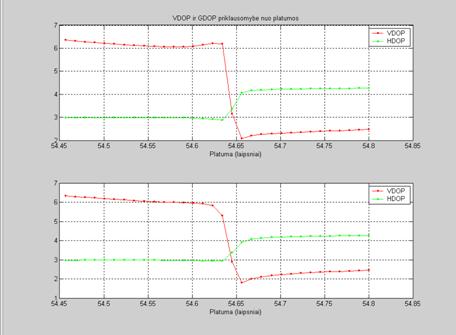
47 pav. HDOP ir VDOP priklausomyb� nuo platumos esant ![]() E (vir�utinis grafikas) ir
E (vir�utinis grafikas) ir ![]() E (apatinis grafikas) ilgumoms
E (apatinis grafikas) ilgumoms
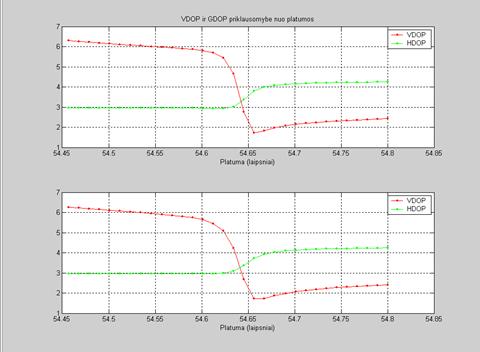
48 pav. HDOP ir VDOP priklausomyb� nuo platumos esant ![]() E (vir�utinis grafikas) ir
E (vir�utinis grafikas) ir ![]() E (apatinis grafikas) ilgumoms
E (apatinis grafikas) ilgumoms
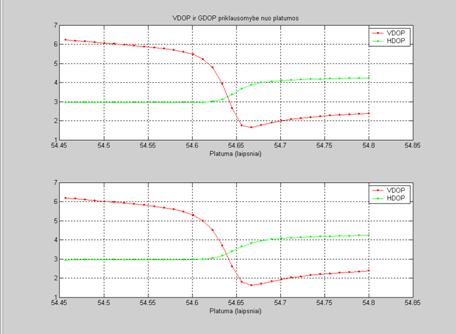
49 pav. HDOP ir VDOP priklausomyb� nuo platumos esant ![]() E (vir�utinis grafikas) ir
E (vir�utinis grafikas) ir ![]() E (apatinis grafikas) ilgumoms
E (apatinis grafikas) ilgumoms
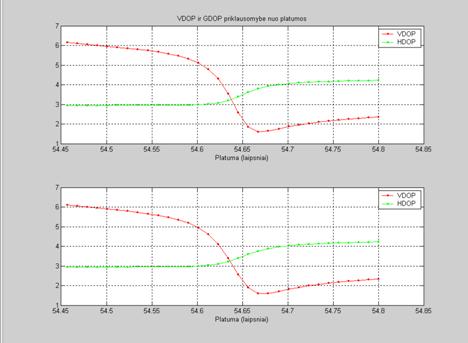
50 pav. HDOP ir VDOP priklausomyb� nuo platumos esant ![]() E (vir�utinis grafikas) ir
E (vir�utinis grafikas) ir ![]() E (apatinis grafikas) ilgumoms
E (apatinis grafikas) ilgumoms
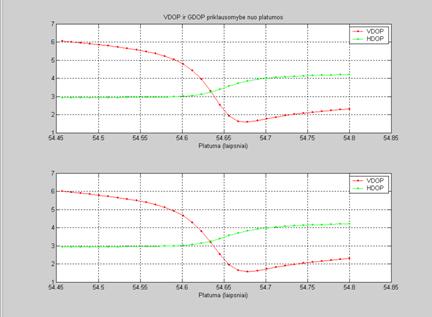
51 pav. HDOP ir VDOP priklausomyb� nuo platumos esant ![]() E (vir�utinis grafikas) ir
E (vir�utinis grafikas) ir ![]() E (apatinis grafikas) ilgumoms
E (apatinis grafikas) ilgumoms
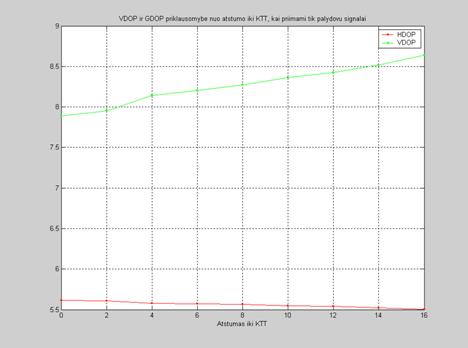
52 pav. VDOP ir HDOP priklausomyb� nuo atstumo iki KTT, orlaivio t�pimo modeliavimo metu, kai priimami tik palydov� signalai.
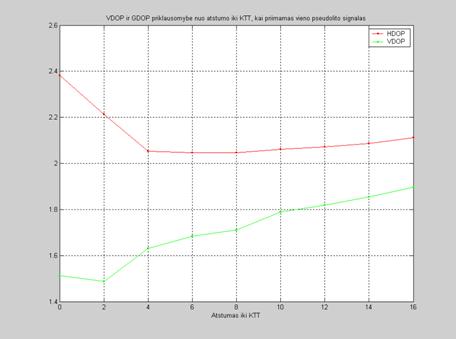
53 pav. HDOP ir VDOP priklausomyb� nuo atstumo iki KTT, orlaivio t�pimo modeliavimo metu, kai naudojami trij� orbitoje esan�i� palydov� ir vieno ant�eminio pseudolito signalai.
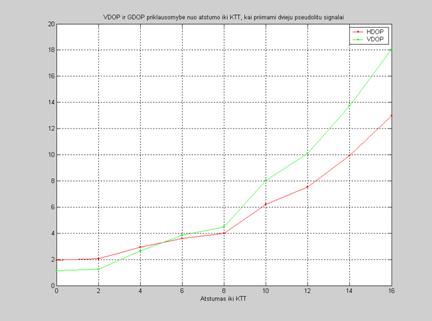
54 pav. HDOP ir VDOP priklausomyb� nuo atstumo iki KTT, orlaivio t�pimo modeliavimo metu, kai naudojami dviej� palydov� ir dviej� ant�emini� pseudolit� signalai.
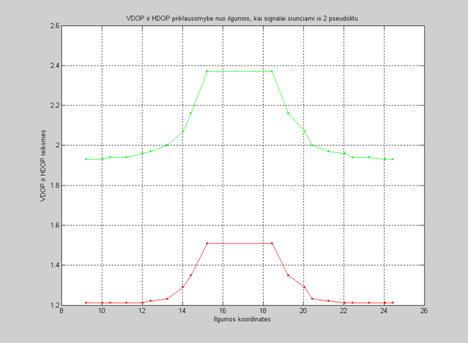
55 pav. HDOP ir VDOP priklausomyb� nuo ilgumos, kai naudojami dviej� pseudolit�, i�d�styt� simetri�kai KTT, signalai
10. Publikuotas magistro straipsnis
Palydovini� sistem� panaudojimo orlaivi� tupdymui Vilniaus oro uoste galimyb�s
A. Pilevi�ius
VGTU AGAI
Anotacija
Aptariami �vair�s tikslumo praradimo faktoriai, �takojantys palydovini� sistem� matavim� tikslum�. Pateikiami matom� palydov� skai�iaus kitimo paros b�gyje steb�jim� rezultatai, pateikiamos konkre�ios geometrini� faktori� (VDOP, HDOP bei PDOP) reik�m�s GPS sistemai ir integruotajai GPS/GLONASS sistemai vir� Vilniaus oro uosto.
�vadas
Egzistuojan�iomis pavien�mis palydovin�mis sistemomis � amerikie�i� GPS, rus� GLONASS, Europos GALILEO, kol kas negalima remtis kaip patikimomis pad�ties nustatymo orlaiviui tupiant, sistemomis. D�l jonosferos rei�kini�, oro uosto geografin�s pad�ties ir kit� prie�as�i� pozicijos koordinat�s gaunamos su nema�a paklaida. Juolab, kol kas iki galo nei�spr�stas nuolatinio kokybi�ko ry�io su reikiamu palydov� skai�iumi klausimas.
Sukurta GPS ir GLONASS suderinanti pad�ties nustatymo sistema teikia daugiau vil�i� jas pritaikyti tupdymo sistemose. Tokie sprendimai u�tikrina pastov� reikiam� �matom�� palydov� kiek�.
1. Tikslumo praradimo faktorius
GPS matavim� tikslumas priklauso nuo daugyb�s faktori�. Net naudojantis vien standartine SPS paslauga (Standard Position Service) atsakymas bus tas pats- tikslum� lemia daugyb� faktori�.
Nustatant SPS, matavim� tikslumas gaunamas minimalaus galimo lygio ribose, tai yra, tikslumas bus ne blogesnis nei numatytas tam tikras lygis konkre�iu laiko momentu. Bet kuriame �em�s pavir�iaus ta�ke matavim� tikslumas horizontalioje plok�tumoje bus lygus arba ma�esnis u� 100 metr� (kai �jungta SA). Tai rei�kia, kad per 24 valand� period� i�matuotos GPS koordinat�s bus ne toliau kaip per 100 metr� nuo tikr�j� ta�ko koordina�i�. Atitinkamas vertikalusis tikslumas- 156 metrai, o laiko tikslumas- 340 nanosekund�i�.
Tokie duomenys turi b�ti, kai orbitoje veikia visi 24 palydovai, ap�valgos auk��io ribotumas siekia 5� be papildom� trukd�i�, gaunami nenutr�kstantys signalai, ma�iausiai, i� 4 palydov�, kuri� geometrinis tikslumo praradimo faktorius ne didesnis kaip 6. Taigi, i� to seka, kad, priklausomai nuo steb�jimo pad�ties arba nuo paros laiko, kis ir matavim� tikslumai. Kalnuotose vietov�se arba miestuose su auk�tais pastatais galime susidurti su situacija, kai tiesioginio matomumo zonoje nebus reikiam� keturi� palydov� arba PDOP (angl. �Position Dilution Of Precision�) bus �ymiai didesnis u� 6.
Realaus tikslumo nepastovumas priklausomai nuo steb�jimo ta�ko koordina�i� arba paros laiko, yra dominuojantis tikslumo praradimo efektas d�l geometrinio faktoriaus. �io faktoriaus sandauga su matavim� paklaidomis ir kitomis paklaidomis duoda bendr�j� koordina�i� paklaid�.
2. Geometrija
�sivaizduokime navigacin� sistem�, kurioje vienas imtuvas matuoja atstumus iki dviej� ant�emini� si�stuv�. Matavimai atliekami norint nustatyti imtuvo plok�tumines koordinates. Imtuvas pastatytas ta�ke, apibr�tame dviej� apskritim� sankirta. Min�t�j� apskritim� centrai sutampa su si�stuv� koordinat�mis (�r. 1 paveiksl�l�). Kaip matome imtuvo matavimuose yra �ioks toks netikslumas. Neteisingai (netiksliai) i�matuotas atstumas iki si�stuv� daro neigiam� poveik� ir koordina�i� skai�iavimams.
1 pav. Si�stuv� pad�ties �taka matavimo tikslumui.
(1a) paveiksl�lyje si�stuvai i� imtuvo �matomi� ~90� kampu. Tokia j� pad�tis suteikia palyginus nedidel� pad�ties reik�mi� nustatymo plot�, kuriame tur�t� b�ti imtuvas. Abu si�stuvai yra simetri�kai prie�ingose imtuvo at�vilgiu pus�se, tad imtuvo X ir Y koordinat�s bus apskai�iuojamos su vienodu tikslumu. (1b) paveiksl�lyje si�stuvai imtuvo at�vilgiu yra i�d�styti ma�esniu kampu, kas savo ruo�tu duoda �ymiai didesn� galim� sprendim� plot�. Tokiu atveju imtuvo Y koordinat�s bus apskai�iuojamos su ma�esniu tikslumu negu X koordinat�s.
Analogi�kai geometrijos �takos efekt� galima i�analizuoti ir GPS sistemai.
3. Vartotojo tikslumo paklaida (UERE)
UERE- (angl. �User
Equivalent Range Error�). Kaip �inome i� GPS veikimo princip�, dydis ![]() apib�dinamas kaip
pseudo-atstum� matavim� standartin� paklaida.
apib�dinamas kaip
pseudo-atstum� matavim� standartin� paklaida.
SPS re�ime pilnoji UERE paklaida yra apie 25 metrus. Ta�iau, i�jungus SA funkcij�, UERE paklaida suma��jo iki 5 metr�. Did�i�j� jos reik�m�s dal� sudaro paklaidos, atsirandan�ios d�l jonosferos v�linimo ir paklaidos, atsirandan�ios d�l signal� atspind�i�. Vartotojai, besinaudojantys dviej� da�ni� imtuvu, turi galimyb� i� pseudo-atstum� matavim� pa�alinti paklaidas, atsirandan�ias d�l jonosferos �takos. Tokiu b�du dar labiau suma�inama UERE paklaida. Ateityje, naudojant papildom� civilin� GPS ne�ant�j� da�n�, visi vartotojai tur�s vienodas galimybes kompensuoti jonosferos paklaidas.
4. �vair�s tikslumo praradimo faktoriai (DOP)
Turint ![]() reik�m�, galime
apskai�iuoti
reik�m�, galime
apskai�iuoti ![]() matricos komponentus.
Atlikus visus skai�iavimus, tampa �manoma �vertinti bendr�
vidutini� kvadrat� sprendinio tikslum�. Tai atliekama tokiu
b�du:
matricos komponentus.
Atlikus visus skai�iavimus, tampa �manoma �vertinti bendr�
vidutini� kvadrat� sprendinio tikslum�. Tai atliekama tokiu
b�du:
![]() (1)
(1)
�ia: ![]() ,
, ![]() ,
, ![]() - imtuvo koordina�i� �vertinimo rytinio,
�iaurinio ir vertikalaus komponent� dispersija,
- imtuvo koordina�i� �vertinimo rytinio,
�iaurinio ir vertikalaus komponent� dispersija, ![]() - imtuvo laiko skal�s dispersija. Jeigu sprendinio
algoritmas parametrizuotas sta�iakamp�je koordina�i�
sistemoje, vietin�je koordina�i� sistemoje naudojamas
tiesioginis kovariacin�s matricos sprendini� transformavimo metodas.
�is sprendinio tikslumo �vertinimas tapatus pseudo-atstumo matavimui.
Matricos D elementai- tai funkcija priklausanti nuo tarpusavio geometrijos tarp
palydovo ir imtuvo. Mastel� �vertinantis koeficientas paprastai
b�na didesnis u� 1. �is koeficientas padidina matavim� paklaid�,
tuo pa�iu suma�indamas koordina�i� apskai�iavimo
tikslum�. D�l �ios prie�asties �is mastel� nusakantis
koeficientas paprastai vadinamas geometriniu tikslumo suma��jimu (GDOP).
- imtuvo laiko skal�s dispersija. Jeigu sprendinio
algoritmas parametrizuotas sta�iakamp�je koordina�i�
sistemoje, vietin�je koordina�i� sistemoje naudojamas
tiesioginis kovariacin�s matricos sprendini� transformavimo metodas.
�is sprendinio tikslumo �vertinimas tapatus pseudo-atstumo matavimui.
Matricos D elementai- tai funkcija priklausanti nuo tarpusavio geometrijos tarp
palydovo ir imtuvo. Mastel� �vertinantis koeficientas paprastai
b�na didesnis u� 1. �is koeficientas padidina matavim� paklaid�,
tuo pa�iu suma�indamas koordina�i� apskai�iavimo
tikslum�. D�l �ios prie�asties �is mastel� nusakantis
koeficientas paprastai vadinamas geometriniu tikslumo suma��jimu (GDOP).
Be bendrojo sprendinio kokyb�s �vertinimo mums dar gali prireikti ir atskir� komponent� tikslum� �vertinimo (trimat�s koordinat�s ir laiko nesutapimai). Kad b�t� gauti atskir� netikslum� �vertinimai, atliekami tokie skai�iavimai:
![]() (2)
(2)
Kiekvienam �i� paklaid� matavimui mes galime nusistatyti atitinkamus DOP dyd�ius (horizontaliai ir vertikaliai koordina�i� dedamajai ir laikui):
![]()
![]() (3)
(3)
![]()
Svarbu pamin�ti,
kad ![]() ir
ir ![]() . �ios i�rai�kos labai praver�ia siekiant i�siai�kinti
tarpusavio s�ry�ius tarp �vairi� DOP. Kadangi �vair�s
DOP yra funkcijos, priklausan�ios nuo imtuvo ir palydov� tarpusavio
pad�ties , jie gali b�ti apskai�iuoti panaudojus palydov�
almanach� bet kokiam palydov� rinkiniui, matomam i� ta�ko, kurio
at�vilgiu atliekami skai�iavimai.
. �ios i�rai�kos labai praver�ia siekiant i�siai�kinti
tarpusavio s�ry�ius tarp �vairi� DOP. Kadangi �vair�s
DOP yra funkcijos, priklausan�ios nuo imtuvo ir palydov� tarpusavio
pad�ties , jie gali b�ti apskai�iuoti panaudojus palydov�
almanach� bet kokiam palydov� rinkiniui, matomam i� ta�ko, kurio
at�vilgiu atliekami skai�iavimai.
Jei imtuvas-palydovas vektoriai yra vienoje plok�tumoje, DOP bus be galo didelis. Fakti�kai, esant tokiam palydov� i�sid�stymui yra ne�manomas koordina�i� matavimas. DOP reik�m�s bus �ymiai ma�esn�s (o tuo pa�iu padid�s ir matavim� tikslumas), kai palydovai bus i�sibarst� po vis� dang�.
5. HDOP ir VDOP palyginimas
Paprastai, kuo daugiau palydov� signal� naudojama skai�iavimuose, tuo ma�esn� gaunama DOP reik�m�, o tuo pa�iu gaunamos ma�esn�s paklaidos. �emiau pateikti paveiksl�liai iliustruojantys DOP reik�mes paros b�gyje vir� Vilniaus oro uosto. Paprastai HDOP reik�m�s svyruoja tarp 1 ir 2. VDOP reik�m�s b�na didesn�s u� HDOP reik�mes, tad ir vertikali� koordina�i� nustatymo tikslumas b�na ma�esnis u� horizontali� koordina�i�. Toks efektas gaunamas tod�l, kad palydovai, i� kuri� gauname signal�, yra auk��iau imtuvo. Horizontali� koordina�i� nustatymas nesusiduria su tokiu efektu, nes paprastai signalus gauname i� palydov�, esan�i� skirtingose pus�se.
Jei �em�s pavir�ius b�t� permatomas radijo signalams, vertikali�j� dedam�j� gal�tum�me nustatin�ti tokiu pa�iu tikslumu kaip ir horizontali�j�. Vertikali� matavim� tikslum� galima padidinti naudojant GPS imtuv� su labai tiksliu laikrod�iu, arba jei labai tiksliai �inomas laiko skali� nesutapimas tarp vartotojo ir GPS palydovo.
DOP dyd�iui �tak� daro ir steb�tojo geografin�s pad�ties platuma. Nesutapimai tarp HDOP ir VDOP labiau i�ry�k�ja �iauriausiose ir pie�iausiose planetos platumose. Taip yra d�l to, kad tose vietose stebima labai ma�ai zenite esan�i� palydov�. Tokie apribojimai atsiranda d�l to, kad GPS palydov� orbit� polinkis sudaro apie 55�, o tai rei�kia, kad niekada nepamatysite vir� sav�s palydovo, jei esate �iauriau arba pie�iau 55�. �iaur�s ir piet� poliuose auk��iausias galimas palydovo vietos kampas yra 45�.
Taigi, kaip matome, Lietuvoje dar galima tik�tis neblog� VDOP rezultat�.
Jei steb�jimo vietos kamp� apribotume iki 15� ir tuo metu steb�ti tik keturis palydovus (tuos, kurie u�tikrina ma�iausias DOP reik�mes), mes pasteb�sim, kad tuo metu, kai HDOP reik�m� tesiekia dyd�ius nuo vieno iki dviej�, VDOP reik�m� gali pakilti iki 7. tai nekeista, nes galime apdoroti tik t� palydov� signalus, kurie pakil� vos per 30 laipsni�. Ar blogai yra tur�ti toki� VDOP reik�m�? Jei UERE paklaida siekia 25 metrus, vidutin� kvadratin� vertikalioji paklaida tur�t� b�ti apie 175 metrus. Suma�inus steb�jimo vietos kampo rib� iki 5 laipsni�, VDOP suma��ja net kelis kartus.
Ta�iau didel� DOP reik�m� gali b�ti pasiekta ir vidutin�se platumose. Tai gali atsitikti tiems imtuvams, kurie gali steb�ti visus matomus palydovus. Kai kuriose vietov�se (pavyzd�iui mi�kingose) GPS imtuvo antena d�l i�kilusi� kli��i� negali priimti signal� i� vis� pusi�. Jei priimame signal� tik i� apriboto dangaus ploto, DOP reik�m� bus didel�, matavim� tikslumas ma�as.
|
DOP |
�vertinimas |
Apra�ymas |
|
Idealus |
Tai auk��iausias �manomas DOP lygis. |
|
|
Puikus |
�io lygio pad�ties matavimai yra pakankamai tiksl�s, kad patenkint� beveik visus vartotojus |
|
|
Geras |
Minimalus lygis reikalingas atlikti svarbius matavimus |
|
|
Vidutinis |
Galimi pad�ties matavimai. Atraminiai ta�kai tur�t� b�ti matuojami papildomai |
|
|
Paken�iamas |
Pad�ties nustatymas gali b�ti atliekamas tik tuo atveju, jei toleruojamas didelis netikslumas |
|
|
Blogas |
Pad�tis gali keistis per futbolo aik�t�s dyd� (ir daugiau). |
6. GPS matavim� paklaidos Vilniaus oro uosto zonoje
Siekiant i�siai�kinti palydovini� sistem� panaudojimo galimybes orlaivi� tupdymo sistemoms Lietuvoje, specialia programine �ranga buvo atlikta dviej� tip� modeliavimai. Pirmuoju atveju buvo nustatoma matom� palydov� skai�ius ir DOP reik�m�s vien tik GPS sistemai. Antruoju atveju tie patys skai�iavimai buvo atlikti integruotai GPS ir GLONASS sistemai. I� paveiksl�liuose pateikt� rezultat� galima padaryti i�vad�, kad orlaivi� tupdymui kur kas geriau pritaikyti integruot� GPS ir GLONASS sistem�. Tokiu atveju stebim� palydov� skai�ius kai kuriuose paros intervaluose padid�ja iki 14. Tuo pa�iu suma�inamos DOP reik�m�s, o tai savo ruo�tu padidina matavim� tikslum�.
Visi steb�jimai buvo atliekami 2005 baland�io 7 dien�. Pirmiausia buvo nustatytas matom� palydov� skai�iaus kitimas paros b�gyje. 2 paveiksl�lyje parodytas matom� GPS ir GLONASS palydov� skai�iaus kitimas priklausomai nuo paros laiko.
3 paveiksl�lyje pateikiamos konkre�i� DOP diagramos. Nesunku pasteb�ti, kad, padid�jus matom� palydov� skai�iui, �ymiai suma��ja DOP reik�m�s. Tokiu b�du gaunami tikslesni matavim� rezultatai.
2 pav. Matom� GPS ir GLONASS palydov� skai�iaus kitimas vir� Vilniaus paros b�gyje. 1 kreiv� rodo bendr� GPS ir GLONASS palydov� skai�i�, 2 kreiv� rodo tik GPS palydov� skai�i�.
3 pav. Konkre�ios DOP reik�m�s Vilniaus oro uostui 2005 04 07.
g) VDOP reik�mi� priklausomyb� nuo paros laiko (tik GPS)
h) HDOP reik�mi� priklausomyb� nuo paros laiko (tik GPS)
i) PDOP reik�mi� priklausomyb� nuo paros laiko (tik GPS)
j) VDOP reik�mi� priklausomyb� nuo paros laiko (GPS su GLONASS)
k) HDOP reik�mi� priklausomyb� nuo paros laiko (GPS ir GLONASS)
l) PDOP reik�mi� priklausomyb� nuo paros laiko (GPS ir GLONASS)
I�vados
I� pateikt� steb�jim� rezultat� matome, kad VDOP reik�m�s (vienos svarbiausi� automatiniam tupdymui) did�i�j� paros dal� yra per didel�s, kad patenkint� ICAO reikalavimus tupdymui pagal III kategorij�. Tuo pa�iu metu naudojantis abiej� veikian�i� pasaulini� pad�ties nustatymo sistem� (GPS ir GLONASS) palydovais situacija �iek tiek pager�ja.
D�l paros b�gyje labai kintan�io matom� palydov� skai�iaus kinta ir DOP reik�m�s. Kriti�kai ma�� matom� palydov� skai�i� gal�t� pakeisti oro uosto teritorijoje �rengti integriniai �vyturiai.
Taigi, be speciali� tiksliai vertikalias koordinates nustatan�i� priemoni� tupdymas pagal III kategorij� ne�manomas.
Literat�ra
Global Positioning System: Theory and Applications (Volume II) [Bradford W. Parkinson and James J. Spilker Jr. (Editors) - 1996]
https://www.codepedia.com/1/Geometric+Dilution+of+Precision+(DOP)
SUMMARY
THE
USAGE POSSIBILITIES OF SATELLITE SYSTEMS FOR AIRCRAFT LANDINGS IN
I�vados
Baigiamajame darbe susipa�inta su tupdymo sistem� evoliucija, istorija, trumpai i�d�stomos kiekvienos sistemos veikimo principai. I�analizuotos skirtingos orlaivi� tupdymo sistemos nuo pat pirm�j� iki dar tik tyrin�jam� stadijoje esan�i� orlaivi� tupdymo sistem�. Susipa�inus su viena ar kita tupdymo sistema, trumpai pateikiami kiekvienos i� j� pagrindiniai tr�kumai ir privalumai.
Analizuojant atsirinkt� literat�r� prieita i�vados, kad palydovini� sistem� panaudojimu pagr�st� orlaivio tupdymo sistemos yra vystymo stadijoje. N�ra priimtos vieningos sistemos, veikian�ios visoje planetoje. Egzistuojan�iomis pavien�mis palydovin�mis sistemomis � amerikie�i� GPS, Rus� GLONASS, europos GALILEO, kol kas negalima remtis kaip patikimomis pozicionavimo tupiant sistemomis. D�l jonosferos rei�kini�, oro uosto geografin�s pad�ties ir kit� prie�as�i� pozicijos koordinat�s gaunamos su nema�a paklaida. Kol kas iki galo nei�spr�stas nuolatinio kokybi�ko ry�io su reikiamu palydov� skai�iumi klausimas. Visa tai veda prie b�tinyb�s ie�koti sprendimo jungiant kelias, i� dalies atliekan�ias tas pa�ias funkcijas, sistemas. Amerikie�iai savos GPS sistemos darom� nemenk� paklaid� suma�ino iki tupdymo reikalavimus atitinkan�i� dyd�i� pasitelkdami papildomus referencinius da�nius. Ta�iau tokios sistemos veikia tik JAV teritorijoje. Sukurta GPS ir GLONASS suderinanti pozicionavimo sistema teikia daugiau vil�i� jas pritaikyti tupdymo sistemose. Tokie sprendimai u�tikrina pastov� reikiam� palydov� skai�iaus matym�. Ant�emini� pseudolit� statymas i�taiso trukd�i� i�kraipyt� palydovo signal� ir duoda patenkinama tikslumo rezultat�.
56 pav. Paros b�gyje vir� Vilniaus oro uosto matom� palydov� projekcijos.
Palydovin�mis sistemomis pagr�st� orlaivi� t�pimo sistem� tikslumas labai priklauso nuo stebim� palydov� skai�iaus ir j� tarpusavio i�sid�stymo imtuvo at�vilgiu. Palydovin�s sistemos integravimas ant�eminiais palydovais pseudolitais yra viena i� priimtiniausi� i�ei�i�.
Gauti skai�iavim� rezultatai parod�, kad geriausia pseudolito �rengimo vieta yra �iauriau KTT slenks�io. Tai yra d�l labai paprastos prie�asties. Kaip matyti 56 paveiksl�lyje, orbitose esan�i� GPS palydov� projekcijos i�sid�sto daugiausiai antrame ir ketvirtame kvadrantuose, tad nat�ralu, kad pirmame ar ketvirtame kvadrantuose �rengtas papildomas GPS signal� si�stuvas kur kas pagerina geometrin� faktori�. Tai �rodoma skai�iavim� rezultatus atspindin�iuose grafikuose. Kas kart� si�stuv� pasta�ius �iauriau imtuvo stebimas VDOP reik�mi� suma��jimas.
Gauti skai�iavim� rezultatai tik i� dalies atspindi reali� situacij�. Tai ir yra pagrindinis �io darbo tr�kumas. Skai�iavimai buvo atliekami tik keturi� si�stuv� atveju. Realiai vartotojo imtuvas gauna duomenis daugiau nei i� keturi� si�stuv�. Galima daryti prielaid�, kad DOP reik�m�s b�t� dar ma�esn�s priimant penki� palydov� ir, pavyzd�iui, trij� pseudolit� signalus. D�l sud�tingos skai�iavimo metodikos to padaryti nepavyko. Ta�iau net ir minimalaus si�stuv� skai�iaus atveju gana ai�kiai stebimas si�stuv� ir imtuvo tarpusavio i�sid�stymo geometrijos pager�jimas vien� i� palydov� pakeitus ant�eminiu pseudolitu.
Pa�io geriausio pseudolito pastatymo ta�ko tiksliai pasakyti kol kas negalima. Nors ir �inomos koordinat�s, ta�iau neai�ku ar tame ta�ke i�vis �manoma pastatyti si�stuv� . Reik�t� i�samiau patyrin�ti vietov�. Vietov�s reljefo ypatumai, auk�ti pastatai ir kiti trukd�iai gali smarkiai �takoti si�stuvo darbo kokyb�. Tad i�siai�kinus geriausios pastatymo vietos koordinates reikt� i�tirti realias tos zonos aplinkos s�lygas.
12. Literat�ra
|
KAYTON M. Avionics Navigation Systems 1997. |
|
|
BRANFORD W. PARKINSON Global Positioning System : Theory and Applications Volume II. |
|
|
B.Hofmann-Wellenhof, H.Lichtenegger, and J.Collins � Global Positioning System Theory and Practise, Springer Wien New York |
|
|
The Instrument Landing System [interaktyvus]. Aeronautics Learning Laboratory, [�i�r�ta 2003-11-24]. Prieiga per internet�: <https://www.allstar.fiu.edu/aero/ILS.htm> |
|
|
Microwave Landing System (MLS) [interaktyvus]. Aeronautics Learning Laboratory, [�i�r�ta 2003-11-24]. Prieiga per internet�: <https://www.allstar.fiu.edu/aero/MLS.htm> |
|
|
Area Navigation [interaktyvus]. Aeronautics Learning Laboratory, [�i�r�ta 2003-11-24]. Prieiga per internet�: <https://www.allstar.fiu.edu/aero/RNAV.htm> |
|
|
Navigational AIDS (NAVAIDS) [interaktyvus] Aeronautics Learning Laboratory, [�i�r�ta 2003-11-24]. Prieiga per internet�: < https://www.allstar.fiu.edu/aero/NAVAIDS.htm> |
|
|
History of Aircraft Landing Aids [interaktyvus] U.S Centennial of Flight Commission, [�i�r�ta 2004-01-02]. Prieiga per internet�: <https://www.centennialofflight.gov/essay/Government_Role/landing_nav/POL14.htm> |
|
|
Wide Area Augmentation System (WAAS) [interaktyvus] Satellite Navigation Products Team, [�i�r�ta 2004-01-23]. Prieiga per internet�: <https://gps.faa.gov/CapHill/hill.htm#waas> |
|
|
Answers for GPS + WAAS and Other Stuff GPS for Pilots [ineraktyvus] Christian Claborne, [�i�r�ta 2004-01-23]. Prieiga per internet�: <https://cyberthought.com/tonytex/faq/waas.htm> |
|
|
George LEVISON Honeywell�s Differential GPS Satellite Landing System [ineraktyvus] [�i�r�ta 2004-01-23]. Prieiga per internet�: <www.bluecoat.org/reports/Lewison_96_DGPS.pdf> |
|
|
AIRPORT NEW LANDING SYSTEM [interaktyvus] Airport-Technology [�i�r�ta 2004-01-23]. Prieiga per internet�: <https://www.airport-technology.com/projects> |
|
|
What is a Satellite Landing System? [interaktyvus] Honeywell [�i�r�ta 2004-02-23]. Prieiga per internet�: <https://content.honeywell.com/dses/assets/datasheets/sls-3000-presentation.pdf>m? |
|
|
Technical Standard Order [interaktyvus] FAA [�i�r�ta 2004-02-28]. Prieiga per internet�: <www.bluecoat.org/reports/FAA-TSO-C129a.pdf> |
|
|
Global Positioning Systems [interaktyvus] AIRCOM AVIONICS [�i�r�ta 2004-02-28]. Prieiga per internet�: <https://www.aircomavionics.com/garmin.htm> |
|
|
DGPS (Differential Global Positioning System) [interaktyvus] THALES [�i�r�ta 2004-02-28]. Prieiga per internet�: <https://products.thalesnavigation.com/en/products/aboutgps/dgps.asp> |
|
|
GPS Pseudolites: Theory, Design, and Applications [H. Stewart Cobb, Disertation, 1997] |
|
|
Differential Global Positioning System (DGPS) [interaktyvus] Metropolitas Airports [�i�r�ta 2004-02-28]. Prieiga per internet�: <https://www.macavsat.org/noise_info/noise_book/sec5/dgps.htm> |
|
|
Technical Liability in Satellite Navigation [interaktyvus] Kim O'Neil [�i�r�ta 2004-09-28]. Prieiga per internet�: <https://www.aatl.net/publications/GNSS-liability.htm> |
|
|
Boris S. Pervan Development, Implementation, and Testing of a Prototype LAAS Architecture [interaktyvus][�i�r�ta2005-03-14].Prieiga per internet�: < https://waas.stanford.edu/~wwu/papers > |
|
|
H. Stewart Cobb, Precision Landing Tests with Improved Integrity Beacon Pseudolites [interaktyvus][�i�r�ta2005-03-14].Prieiga per internet�: <https://waas.stanford.edu/~wwu/papers> |
|
|
The geographic coordinate-system [interaktyvus] Svein Yngvar Willassen [�i�r�ta2005-03-24]. Prieiga per internet�: <https://www.willassen.no/msl/node5.html> |
|
|
Moving Satellites HomePage [interaktyvus] Varol Okan [�i�r�ta2005-04-24]. Prieiga per internet�: <https://www.movingsatellites.com/> |
|
|
The GDOP Metric [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�: <https://www.frc.ri.cmu.edu/users/lizpearl/gdop.html> |
|
|
Geodetic Datum Overview [interaktyvus] Peter H. Dana [�i�r�ta2005-03-27]. Prieiga per internet�:< https://www.colorado.edu/geography/gcraft/notes/datum/datum.html> |
|
|
Datum Transformations of GPS Positions [interaktyvus] �-blox ag [�i�r�ta2005-03-27]. Prieiga per internet�:< https://www.u-blox.ch> |
|
|
Edward Alan LeMaster SELF-CALIBRATING PSEUDOLITE ARRAYS [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�:< https://sun-valley.stanford.edu/users/rover/info.html> |
|
|
H. Stewart Cobb GPS PSEUDOLITES: THEORY, DESIGN, AND APPLICATIONS [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�:<waas.stanford.edu/~wwu/papers/gps/PDF/Thesis/StuCobbThesis97.pdf> |
|
|
Terry J. Bouska DEVELOPMENT AND SIMULATION OF A PSEUDOLITE-BASED FLIGHT REFERENCE SYSTEM [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�:<https://research.maxwell.af.mil/ papers/ay2003/afit/AFIT-GE-ENG-03-03.pdf> |
|
|
A Partial Theory of Position Estimation [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�:< www.frc.ri.cmu.edu/~alonzo/course/pos_th~1.fm5.pdf> |
|
|
H.K. Lee FLIGHT TEST RESULTS OF AN INTEGRATED GPS/INS/PSEUDOLITE SYSTEM FOR AIRCRAFT PRECISION APPROACH AND LANDING [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�:< www.nuaanrc.com/meetingcenter/ziliao/> |
|
|
Jinling Wang, GPS AND PSEUDO-SATELLITES INTEGRATION FOR PRECISE POSITIONING [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�: < www.gmat.unsw.edu.au/snap/publications/wang_etal2001b.pdf> |
|
|
H. Stewart Cobb, Precision Landing Tests with Improved Integrity Beacon Pseudolites [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�: < waas.stanford.edu/~wwu/papers/gps/PDF/improved_IBs_stu95.pdf> |
|
|
Hung-Kyu Lee, Carrier Phase Processing Issues for High Accuracy Integrated GPS/Pseudolite/INS Systems [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�: < www.springerlink.com/index/6V1G1L6VQ46F9A18.pdf> |
|
|
J. Wang, Pseudolite Applications in Positioning and Navigation: Progress and Problems [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�: < www.gmat.unsw.edu.au/snap/publications/> |
|
|
John Warburton, Integration and Testing of a Wide-Band Airport Pseudolite [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�:< www.gps.tc.faa.gov/REPORTS/ION999.pdf> |
|
|
SHAU-SHIUN JAN, AIRCRAFT LANDING USING A MODERNIZED GLOBAL POSITIONING SYSTEM AND THE WIDE AREA AUGMENTATION SYSTEM [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�:<www.scopus.com> |
|
|
Hung Kyu Lee, AUGMENTING GPS BY GROUND-BASED PSEUDOLITE SIGNALS FOR AIRBORNE SURVEYING APPLICATIONS [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�:<www.scopus.com> |
|
|
Dah-Jing Jwo, Efficient DOP Calculation for GPS with and without Altimeter Aiding [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�:<www.scopus.com> |
|
|
Chris Bartone, Ranging Airport Pseudolite for Local Area Augmentation [interaktyvus] [�i�r�ta2005-03-27]. Prieiga per internet�:<www.scopus.com> |
|
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 5143
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved