| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
| Autó | élelmiszer | épület | Földrajz | Gazdaság | Kémia | Marketing | Matematika |
| Oktatás | Orvostudomány | Pszichológia | Sport | Számítógépek | Technika |
DOCUMENTE SIMILARE |
|
Tartalomjegyzék
Alapfogalmak
a. Irányítás fogalma
b. Nyitott és zárt hatásláncú irányítás
c. Az önműködő szabályozás elvi felépítése
d. Zavar kompenzáció
Matematikai alapok összefoglalója
a. Differenciálegyenlet megoldása az időtartományban
b. Fourier transzformáció
c. Laplace transzforműáció
d. Differenciálegyenlet megoldása a frekvencia tartományban
Lineáris folytonos idejű rendszerek leírása.
Rendszer modell
Állapotegyenletek
Tipikus vizsgáló jelek
Mintavételes rendszerek leírása
Mintavételezés, tartás
A z transzformáció
Inverz z transzformáció
Folytonos idejű rendszerek diszkrét idejű modellje
Folytonos és diszkrét idejű rendszerek összekapcsolása
Diszkrét idejű állapotegyenletek
Állapotegyenletek átalakítása
Összekapcsolt rendszerek állapotegyenlete
Összefüggés az állapotegyenlet és az átviteli függvény között
Lineáris tag jelátviteli tulajdonságai
Átmeneti függvény
Súlyfüggvény
Diszkrét rendszerek impulzus átviteli függvénye
Folytonos idejű jelátviteli tagok frekvencia átviteli függvényei
Nyquist diagram
Bode diagram
Összefüggés az amplitudó és a fázisdiagram között
Diszkrét idejű tagok frekvencia átviteli függvénye
A mintavételezett jel frekvencia spektruma
A visszaállított jel spektruma
Diszkrét frekvencia átviteli függvény
Tipikus folytonos jelátviteli tagok jelátviteli tulajdonságai
Ideális tagok
Tárolós tagok
Visszacsatolt rendszerek
A lineáris szabályozások stabilitása
A stabilitás fogalma
A zárt rendszer aszimptotikus stabilitása
Stabilitásvizsgálatok a nyitott kör átviteli függvénye alapján
Diszkrét idejű rendszerek stabilitása
Strukturális és feltételes stabilitás
A visszacsatolás hatása a stabilitásra
Szabályozási körök követési és zavarelhárítási tulajdonságai
A szabályozási hiba
Dinamikus jellemzők a frekvencia tartományban
Szabályozási körök méretezési kérdései
Méretezési eljárások
Méretezés az átviteli függvény alapján
Kompenzációs szabályozók, P, PI, PD, PID kompenzáció
Holtidő kompenzálása
Labilis folyamatok szabályozása
Diszkrét idejű kompenzáció
Diszkrét idejű kompenzáció tervezése
A mintavételezési idő megválasztása
Szabályozások zavarelhárító képessége
Zavar kompenzáció
Kaszkád szabályozások
Nemlinearitások hatása
Munkaponti linearizálás
A szabályozási kör működése a telítési tartományban
Állásos szabályozások
Alapfogalmak
Irányítás: egy folyamatba történő beavatkozás adott cél megvalósítása érdekében. Mi technológiai folyamatokkal fogunk csak foglalkozni.
A folyamat változása külső, belső hatások következtében jön létre. A folyamat jellemzőit és a külső hatásokat jelek testesítik meg.
A jelnek van fizikai megjelenési formája, pl. áram, feszültség, nyomás, ez a jelhordozó.
A jelnek van információ tartalma is, mely a jel által képviselt hatást írja le. Pl, hogyan változik az áram, vagy a feszültség.
Az irányítás módja az, hogy az irányító berendezés mért vagy más úton szerzett adatok alapján megváltoztatja a folyamatjellemzőit, így eléri más jellemzőknek is a megkívánt mértékű változását.
Az irányított folyamat és az irányító berendezés együttesen alkotja az irányítási rendszert.
A rendszertechnika a folyamatok anyagi jellemzőitől elvonatkoztatva a rendszerek közös jellegzetességeivel foglalkozik.
Az irányítás jelei. Az irányított folyamatnak vannak belső jelei, amelyeket állapotváltozóknak nevezünk. Az állapotváltozók a folyamat mozgását írják le. A belső mozgásokról a kimenő jelekből kapunk információt. A folyamatot érő külső hatásokat pedig a bemenő jelekkel vesszük figyelembe. A bemenő jelek egy rsze irányító jel, másik része pedig zavaró jel.
A jel lehet a folytonos idő vagy a diszkrét idő függvénye. A jel értékkészlete lehet a valós vagy komplex számok összessége vagy csak bizonyos számok összessége, vagy ezek része. A folytonos idejű és értékkészletű jeleket analóg jeleknek, a diszkrét idejű és diszkrét értékkészletű jeleket digitális jeleknek nevezik.
1. ábra: Folytonos ésdiszkrét jelek.
A jelek lehetnek determinisztikusak vagy sztohasztikusak. A determinisztikus jeleket időfüggvényükkel lehet megadni. A sztohasztikus jeleket statisztikus tulajdonságaival jellemezhetjük.
Az ipari gyakorlatban a jeleknek néhány fontos tulajdonsága van:
korlátosak,
zajosak
véges sávszélességűek,
meghatározott információ tartalommal rendelkeznek.
Az irányítás funkciói
Az irányítási rendszer a 2. ábrán látható fő komponensekkel rendelkezik.
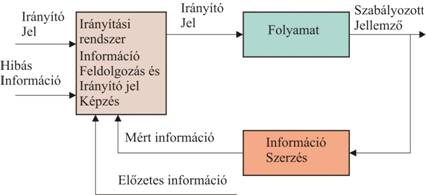
2.ábra: Az irányítási rendszer komponensei.
A bemenő jelek:
Irányító jel
A rendszerről rendelkezésre álló előzetes információk ( egy része téves is lehet)
Az irányított folyamat mért paraméterei, amely real-time információ
Zavaró jelek
Kimenő jel az irányított jellemző.
Rendszervázlatok
Szerkezeti vázlat, a rendszert alkotó berendezésekről ad áttekintést. Példa erre egy váltakozó áramú fordulatszám szabályozott hajtás
A váltakozó áramú szabályozott hajtás blokkvázlata látható a 3. ábrán. Az egy vagy háromfázisú 50 Hz-es váltakozó áramú energiát egy egyenirányító (ac/dc konverter) egyenfeszültségű energiává alakítja át. Az egyenfeszültséget a dc/ac konverter (inverter) alakítja vissza háromfázisú változtatható frekvenciájú energiává. Az egyenirányító és az inverter között található a közbenső kör, melynek energiatárolója szűrőként szerepel. A gépoldali konverter és a váltakozó áramú motor az egyenáramú motor elektromechanikus ekvivalensének tekinthető. A szabályozó vagy vezérlő elektronika e hajtásoknak nélkülözhetetlen része.
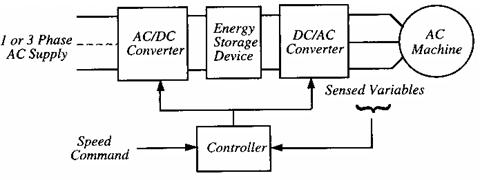
3. ábra: Váltakozó áramú hajtás szerkezeti vázlata.
Hatásvázlat vagy blokk diagram a jelátalakítás folyamatát ábrázolja. Elemei nem a szerkezeti elemek, hanem jelformáló tagok. A tag a blokkvázlat építőeleme, mely a berendezés kimenő és bemenő jelei közötti függvénykapcsolatokat szimbolizálja. A tagokat nyilakkal ellátott vonalak kötik össze. A nyilak a jelfolyam irányát mutatják. A nyilak iránya a hatásirány, és az ezekkel összekapcsolt elemek hatásláncot képeznek. A jelek között műveletek jelzésére egyezményes jelölések vannak. Ilyenek az összegező és a különbségképző, szorzó és osztó műveletek.
ábra: egyenáramú külsőgerjesztésű motor lineáris blokkvázlata.
Nyitott és zárt hatásláncú irányítás
Nyitott láncú irányítás: a folyamat irányított jellemzőjéről szerzett valós idejű információ nem vesz részt az irányítójel képzésben. Ez más szóval vezérlés (opel loop control).Példa erre az áramtól vagy időtől függő motor indítás vezérlés. A vezérlés akkor lehet pontos, ha az összes zavaró jellemzőt ismerjük. A nyitott hatásláncú vezérlés mindig stabil.
Zárt hatásláncú irányítás: Az irányított jellemző tényleges értéke visszahat a beavatkozásra-. Ez a szabályozás ( Closed loop control). Az irányított jellemző tényleges értékét és a kívánt értéket összehasonlítva keletkezik a beavatkozó jel. A szabályozás lehet kézi vagy automatikus. A szabályozás előre nem várt zavaró hatásokat is képes figyelembe venni. De lehet instabil.
Az önműködő szabályozás felépítése.
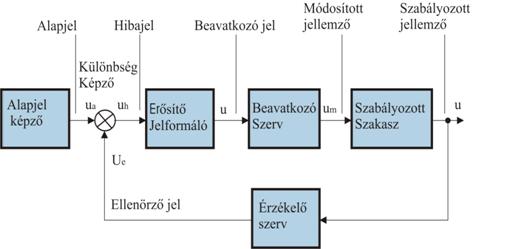
5. ábra: Az önműködő szabályozó szerkezeti vázlata.
Gyakran használjuk az összevonz rendszervázlatot, amikor az erősítő, jelformáló szerv és a beavatkozó szerv egy blokként szerepel, és a szabályozott szakasz a következő elem.
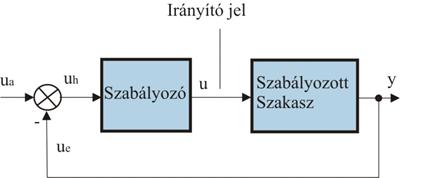
6. ábra: összevont blokkvázlat.
Zavarkompenzáció
A szabályozási körben a szabályozott jellemzőt visszacsatoljuk a szabályozókör elejére. Így visszacsatolás, feedback keletkezik. Negatív visszacsatolás estén az előírt érték és a módosított jellemző különbségét képezzük. Kellően nagy körerősítés esetén a módosított jellemző az ellenőrző, illetve az alapjelhez viszonyítva kis értékű rendelkező jellel állítható be a kívánt értékre. A zárt szabályozási rendszer egy olyan tag, ahol a bemenő jel az alapjel, a kimenő jel pedig a szabályozott jellemző. A két jel között meghatározott arányosság áll fenn, függetlenül a zavaró jelektől. A zavaró jelekről nincs szükség ismeretekre, mert hatásukra a szabályozott jellemző megváltozik és ez beavatkozást eredményez.
Fontos a szabályozó dinamikus viselkedése is. A jelátviteli tagok jelkésleltetést okoznak, így a változások a hatásláncban időkéséssel terjednek. Ez az időkésés a szabályozott jellemző értékében eltéréseket okozhat, és a rendszerben lengések keletkezhetnek.
Ha a lényeges zavaró hatások ismertek, hatásuk jobban kiküszöbölhető. Ekkor ugyanis a zavar fellépte esetén a szabályozott jellemzőre gyakorolt hatás kialakulása előtt be lehet avatkozni. Ezt hívjuk zavarkompenzációnak. A megvalósítás módja pedig az előrecsatolás, feedforward. Ekkor a zavaró jellemzőtől függően olyan jelet vezetünk a hatáslánc alkalmas összegezési pontjára, amely a zavarás hatását kiegészíti. Ez nyílt láncú beavatkozást jelent. Az előrecsatolást általában kombinálva alkalmazzák a visszacsatolással. A hagyományos szabályozási feladatokat a visszacsatolt rendszer látja el, amely az egyéb, nem ismert zavarok hatását kompenzálja, az ismert zavar felléptekor pedig működik az előrecsatolás.
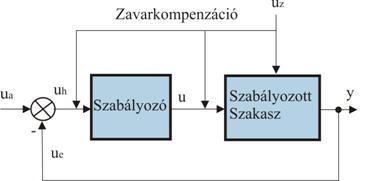
7. ábra: zavarkompenzáció.
Matematikai alapok.
Egy bemenetű és egy kimenetű lineáris rendszer működését n-ed rendű differenciál egyenlet írja le:
![]()
Az egyenletben m?n.
A
differenciálegyenletnek elvileg végtelen sok megoldása van, amelyek közül azt
kell kiválasztani, amely eleget tesz az y(t) függvényre vonatkozó
peremfeltételeknek. A peremfeltételek kezdeti feltételekként adottak: ![]()
![]()
![]() …Az egyenlet inhomogén differenciál egyenlet, amely inhomogén
abban az esetben, ha a gerjesztés függvény,
g(t) =0.
…Az egyenlet inhomogén differenciál egyenlet, amely inhomogén
abban az esetben, ha a gerjesztés függvény,
g(t) =0.
A differenciálegyenlet általános megoldását a homogén egyenlet általános megoldásának és az inhomogén egyenlet egy partikuláris megoldásának összegeként kapjuk.
![]()
A homogén differenciálegyenlet általános megoldása:
![]()
k1, k2, …kn állandók, s1, s2, …sn pedig a karakterisztikus egyenlet gyökei.
Ha a karakterisztikus egyenletnek többszörös gyökei is vannak, akkor az e4gyes tagokban az exponenciális függvények t hatványaival vannak szorozva. Pl ha s12 kétszeres gyök, a megoldás az alábbi alakú lesz:
![]()
Az inhomogén egyenlet partikuláris megoldása legyen f(u), mivel a gerjesztő jeltől függ. Ezzel az általános megoldás:
![]()
A jobboldalon álló tényezők közül csak f(u) függ a bemenőjeltől.
Fourier transzformáció
Bármely y(t) jel felírható harmonikus jelek összegeként. Periodikus jelek esetén az ősszeg megszámlálhatóan végtelen sok tagból áll, amelyek diszkrét frekvenciákkal rendelkeznek. Ez esetben Fourier sorról beszélünk. Komplex formája:
![]()
A képletben ![]() körfrekvencia, és Ts az y(t) jel periódus ideje.
körfrekvencia, és Ts az y(t) jel periódus ideje.
A cn komplex együtthatót a következő összefüggésből kapjuk:
A cn amplitúdók az y(t) periodikus jel amplitudó spektrumát jelentik.
Nem periodikus jelek esetén az y(t) függvény spektruma végtelen sok összetevőből áll, amelynek frekvenciái folytonos eloszlásúak. Ekkor egy w körfrekvencia körüli dw sávra számított amplitúdó sűrűséggel számolhatunk. Ennek 2p szeresét jelöljük y(jw val:
![]()
![]()
Az egyenletek alkotják a Fourier transzformációs párt. Összefüggést írnak le az y(t) időfüggvény és az y(jw amplitúdó sűrűség spektrum között.
Az integrál csak akkor létezik, ha az y(t) függvény abszolút integrálható, vagyis ha
![]() = véges.
= véges.
Ez nagyban korlátozza a szóba jöhető függvények számát.
Nagyon gyakran az y(t) függvény csak t időkre különbözik nullától, ekkor elég az integrálást 0 és + között végezni.
A Fourier transzformáció nagy előnye, hogy a differenciál egyenletek egyszerű algebrai egyenletekké redukálódnak a frekvencia tartományban. Így az időtartományban a differenciálást és integrálást algebrai műveletek helyettesítik.
Az abszolút integrálhatóság kritériuma azt is jelenti, hogy y(t) négyzetes integrálja is létezik. Így a jeleknek véges energiájuk van. Ez a frekvencia tartományban a Parseval vagy Rayleigh tétellel fejezhető ki:
![]()
Laplace transzformáció
A Fourier transzformáció használatát az abszolút integrálhatóság feltétele feltétel erősen korlátozza. Emiatt sok, a gyakorlat számára fontos függvénynek, így az ugrásfüggvénynek sincs Fourier transzformáltja.
E korlátozás
jelentősen csökkenthető, ha a transzformálandó függvényt ![]() -tényezővel szorozzuk meg és azután képezzük a Fourier
transzformáltját. Ez esetben s>a
feltétel esetén még az
-tényezővel szorozzuk meg és azután képezzük a Fourier
transzformáltját. Ez esetben s>a
feltétel esetén még az ![]() exponenciális függvény
is abszolút integrálhatóvá válik a t=0
és t=+ tartományban.
exponenciális függvény
is abszolút integrálhatóvá válik a t=0
és t=+ tartományban.
Az ![]() tényezővel szorzott egyoldalas függvény Fourier
transzformáltját az eredeti függvény Laplace transzformáltjának nevezzük:
tényezővel szorzott egyoldalas függvény Fourier
transzformáltját az eredeti függvény Laplace transzformáltjának nevezzük:
![]()
ahol az s=s+jw operátor pozitív valós részű komplex szám, s>
Ha képezzük az s j átmenetet, az Y(s) Laplace transzformált az Y(jw Fourier transzformáltba megy át, Ha a Fourier transzformált létezik. Az inverz Laplace transzformált az inverz Fourier transzformáció képletéből s=jw helyettesítéssel kapható.
A formula komplex integrál, ahol az integrálási utat úgy kell kiválasztani, hogy y(s) regularitási tartományban haladjon, és a szinguláris helyek tőle balra essenek. Ezt az általános érvényű Riemann-Mellin-féle inverziós formulát a gyakorlati számításokban szűkebb érvényű, de könnyebben kezelhető módszerekkel (pl. kifejtési tétel) lehet helyettesíteni.
Néhány egyszerű függvény Laplace transzformáltja az alábbi:
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Műveleti szabályok
a.) Differenciálás
![]()
Általánosítva, az n-ik derivált Laplace transzformáltja a következő alakban írható fel:

Ha az összes kezdeti érték zérus, akkor az időszerinti differenciálás s megfelelő hatványával való szorzássá egyszerűsödik.
Azokban az esetekben,
amikor egy egyoldalas függvény a t=0
pontban a t![]() tartománybeli y=0 értékéről y=y
tartománybeli y=0 értékéről y=y![]() ra ugrik a (2.16) egyenletben y(0) két különböző felfogásban
értelmezhető.
ra ugrik a (2.16) egyenletben y(0) két különböző felfogásban
értelmezhető.
a.) A szigorú matematikai szemléletmódban az y függvény a szakadás helyén nem differenciálható, így a (2.16) a t> tartománybeli differenciálhányadosainak Laplace transzformáltját adja értelemszerűen e tartomány határán elhelyezkedő y(0) kezdeti értékkel. (Ezek a differenciálhányadosok t esetén a szakadási hely un. jobboldali differenciálhányadosaihoz tartanak, így a (2.16b)-ban előforduló y(0); stb. értékek is egyértelműek).
b.) A matematikailag nem eléggé precíz, de
praktikus esetben – legalább is a (2.16a) egyenletre – jól használható felfogás
az y függvény ugrását a t=0 pontban egy Dt ideig tartó véges meredekségű szakasz elméleti határesetének
tekinti. Ekkor a (2.16a) egyenletben szereplő kezdeti érték y(0)=0. A véges meredekségű
szakaszon létezik differenciálhányados, amelynek pl. az időfüggvénye, ha a
meredekség állandó, Dt szélességű állandó amplitúdójú
négyszögimpulzus. Ennek területe a meredeken emelkedő szakasz y![]() végértéke (Dt y
végértéke (Dt y![]() Dt). Ha a meredekség nő, Dt csökken, az impulzus terület azonban változatlan marad. A végtelen
meredekségre való áttéréskor az impulzus y
Dt). Ha a meredekség nő, Dt csökken, az impulzus terület azonban változatlan marad. A végtelen
meredekségre való áttéréskor az impulzus y![]() területű Dirac impulzussá
válik.
területű Dirac impulzussá
válik.
Ekkor a (2.16a) egyenlet y(0)=0 helyettesítéssel nemcsak a t> tartomány differenciálhányadosának, hanem formálisan az „ugrás differenciálhányadosának” minősíthető Dirac impulzusnak is megadja a Laplace transzformáltját.
A b.) felfogás matematikai pongyolasága ellenére is helyes eredményt ad, ameddig olyan jelek képzésére használják, amelyek egy integrátoron (vagy a későbbiekben tárgyalt tárolós tagon) haladnak keresztül. Az integrálás ugyanis megszünteti a problémát okozó Dirac függvényt.
A b.) értelmezés akkor válik egyre nehezebbé, ha a (2.16b) egyenlet kapcsán a magasabb rendű differenciahányadosokra is ki akarjuk terjeszteni. Ekkor már a Dirac függvény differenciálhányadosait is értelmezni kellene, ami matematikailag egyre abszurdabb eredményre vezet.
b.) Integrálás
c.) Eltolási tétel
![]()
Az egyoldalas y(t) függvény kezdőpontjának T-vel való késleltetése a transzformált függvényben exp(-sT)-vel való szorzással vehető figyelembe.
d.) Csillapítási tétel
![]()
A t tartománybeli
exponenciális ![]() csillapítás az s
tartományban a-val történő eltolásnak felel meg.
csillapítás az s
tartományban a-val történő eltolásnak felel meg.
e.) Kezdeti és végérték tételek
Nagyon gyakran használható tételek a t és az s operátoros tartománybeli határértékek közötti összefüggést írják le:
![]()
![]()
Ez utóbbi kifejezés
akkor alkalmazható, ha Y(s) pólusai a
baloldali félsíkra esnek (tehát pl. ![]() ; sin(t); stb.
függvények esetén helytelen eredményt
ad).
; sin(t); stb.
függvények esetén helytelen eredményt
ad).
f.) Konvolúció (Faltung) tétel
Két függvény konvolúcióján az alábbi kifejezést értjük:
A függvény Laplace transzformáltja a következőképpen számítható:
Ha ![]() , és
, és  ,akkor
,akkor
![]()
Azaz a konvolúció az operátoros tartományban szorzásnak felel meg.
g.) Racionális törtfüggvény inverz transzformáltja
Lineáris koncentrált paraméterű rendszerek analízisekor és szintézisekor előforduló jelek Laplace transzformáltja a legtöbbször racionális törtfüggvény.
![]()
Az egyenlet jobb oldala részlettörtekre
bontható és tagonként transzformálható az időtartományba. Ez a kifejtési
tétel, amely akkor egyszerű, ha a nevező s![]() gyökei – y(s)
pólusai – egyszeresek. Ekkor a résztörtekre bontott alak:
gyökei – y(s)
pólusai – egyszeresek. Ekkor a résztörtekre bontott alak:
![]()
![]()
![]() a H(s) polinom s szerinti deriváltjának értéke az s=si helyen.
a H(s) polinom s szerinti deriváltjának értéke az s=si helyen.
az időfüggvény:
![]()
Többszörös gyökhöz a részlettörtekre bontáskor a gyök multiplicitásával azonos számu részlettört tartozik. Pl. ha az i-ik gyök kétszeres, a megfelelő részlettört:
![]()
![]()
Az ehhez tartozó időfüggvény táblázatból kikereshető:
![]()
Gépi számítás:
A részlettörtekre bontást a MATLAB programmal a residue utasítással végezhetjük el. Megfelelő paraméterezéssel az utasítás a racionális törtfüggvények részlettörtjeinek együtthatóit és pólusait adja, vagy ezekből rekonstruálja az eredő tört számlálóját és nevezőjét.
Lineáris állandó együtthatós n-ed rendű differenciálegyenlet megoldása a frekvencia tartományban
Az állandó együtthatós differenciálegyenlet frekvencia tartománybeli megoldásakor az időfüggvények helyett áttérünk azok Laplace transzformáltjára, ezáltal a differenciálegyenlet algebrai egyenletté válik. Kifejezzük a keresett ismeretlen jelet és az eredményt visszatranszformáljuk az időtartományba.
A szabályozott szakasz matematikai modellje
Az irányító rendszerekben az irányított folyamatot rendszertechnikai modellel írjuk le. A modell a bemenő és kimenő jelek közötti összefüggéseket írja le. A modell alkotás elméleti megfontolásokkal, empirikusan, vagy a két módszer kombinációjával alkotható meg. Empirikus esetben a folyamaton végzett mérések alapján határozzuk meg a modellt, amit identifikációnak nevezünk. A modell mindig olyan közelítése a folyamatnak, amely az irányítás szempontjából elhanyagolható kevésbé fontos tényezőket nem tartalmazza.
Fizikai rendszerekben a fellépő hatások a rendszer tehetetlensége miatt nem érvényesülhetnek azonnal. Azaz, a rendszer mindig tartalmaz energiatárolókat. Ezek különféle formában vannak jelen, mint hőtartalom, villamos töltés, mágneses fluxus, helyzeti és mozgási energia, vagy logikai rendszerekben a regiszterek vagy memória elemek. A tároló elemek tartalma csak egy véges idő alatt változhat meg, így a rendszer állapota a pillanatnyi bemenő jeleken kívül a korábbi eseményektől is függ. Ezen tároló elemek tartalma egyértelműen jellemzi a rendszer állapotát, így a további állapot a vizsgált időpont előtti állapotok ismerete nélkül is leírható. Ezért a rendszer ezen tárolók tartalmával kapcsolatban álló belső jelekkel, úgynevezett állapotváltozókkal is leírható. Az állapotváltozók olyan jelek, amelynek az értéke egy következő pillanatban meghatározható az adott időpontbeli értékből, a bemenő jelekből és a rendszer paramétereiből. Ilyen jelek az analóg rendszerekben lévő integrátorok kimeneti jelei, vagy a passzív villamos hálózatokban az induktivitások árama, a kondenzátorok töltése, feszültsége.
Az állapotváltozók a bemenő jelek és a kimenő jelek közötti kapcsolatokat differenciál egyenletek, és algebrai egyenletek- állapot egyenletek írják le.
A szabályozott szakasz matematikai modelljének megalkotását egy egyenáramú motor segítségével szemléltetjük.
1. Külső gerjesztésű egyenáramú gép modellje.
Differenciál egyenlet és blokkvázlat
A külsőgerjesztésű egyenáramú gép helyettesítő áramköre az 1. ábrán látható.
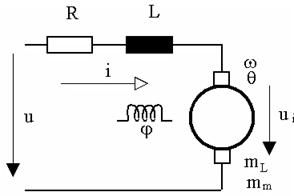
8. ábra: Külső gerjesztésű gép helyettesítő áramköre.
A gépet az ua armatúra feszültségről tápláljuk. Armatúra körében ia armatúra áram folyik az Ra armatúra köri ellenálláson és az La armatúra köri induktivitáson keresztül. Az armatúrában indukálódik az ui indukált feszültség. A gép nyomatéka mm, míg az mL a gép tengelyét terhelő összes nyomaték. A teljes forgó tömeg tehetetlenségi nyomatéka J.
A megfelelő differenciál egyenletek a következők:
![]() armatúra hurokegyenlet,
armatúra hurokegyenlet,
![]() indukált
feszültség, komprenzált gépet, azaz állandó fluxust feltételezve
indukált
feszültség, komprenzált gépet, azaz állandó fluxust feltételezve
![]() mechanikai
egyenlet
mechanikai
egyenlet
![]() a motor
villamos nyomatéka
a motor
villamos nyomatéka
mL pedig a forgórészre ható teljes terhelő nyomaték.
![]() szögsebesség
szögsebesség
 szögelfordulás
szögelfordulás
A 2. és 4. egyenletekkel, kiküszöbölve a fluxust, felírható:
![]()
Ahol ![]() az armatúrában
mechanikai teljesítménnyé átalakuló villamos teljesítmény.
az armatúrában
mechanikai teljesítménnyé átalakuló villamos teljesítmény.
![]() , így a villamos teljesítmény:
, így a villamos teljesítmény:
![]()
Az egyenáramú gép állapotegyenleteinek felírásához ki kell jelölnünk az állapotváltozókat. Ezek:
I armatúra áram, amely az induktivitásban tárolt induktív energia miatt nem változhat ugrásszerűen,
w szögsebesség, amely a forgó tömegekben tárolt mozgási energia miatt szintén nem változhat ugrásszerűen,
q szögelfordulás, amely a szögsebesség integrálja, tehát szintén nem változhat ugrásszerűen.
A motor egyenleteket ezek figyelembe véve átrendezzük:
![]()
![]()
![]()
A motor kimenő jelei a szögsebesség és a szögelfordulás:
![]() és
és ![]()
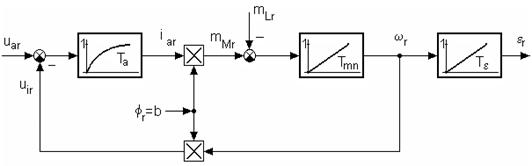
A fenti egyenletek adják az egyenáramú szervomotor állapotegyenletes alakját az időtartományban. Ez alapján felrajzolható a motor hatásvázlata, vagy számítási modellje, lásd 9. ábra.
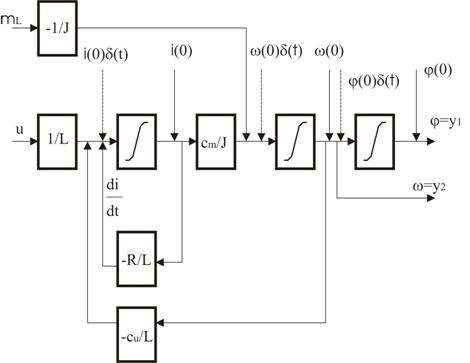
9. ábra: Az egyenáramú motor állapotegyenletek alapján felrajzolt hatásvázlata.
Az állapotegyenletek a frekvencia tartományban
Az egyenáramú motor állapotegyenletét a frekvencia tartományban is felírhatjuk. Ehhez át kell térnünk a Laplace transzformáltakra.
![]()
![]()
![]()
A motor kimenő jelei a szögsebesség és a szögelfordulás:
![]() és
és ![]()
A hatásvázlat a 10. ábrán látható
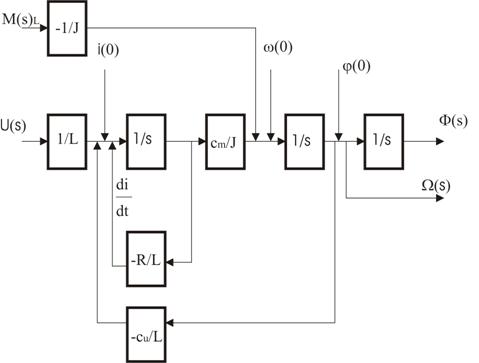
10. ábra: Állapotegyenlet a frekvencia tartományban.
Pl: Differenciál egyenletek megoldása
Példa: Legyen egy egyfázisú egyutas diódás egyenirányító induktív jellegű impedanciával terhelve. Szinuszos tápfeszültség esetén határozzuk meg a terhelésen folyó áramot.
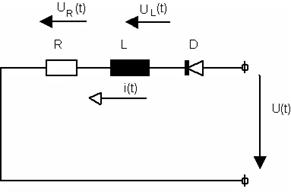
11. ábra: egyutas diódás egyenirányító LR terheléssel.
Az áramkörre az alábbi differenciál egyenlet írható fel:
![]()
A homogén egyenlet általános megoldása az alábbi:
![]()
Ha dióda nem lenne az áramkörben, a bekapcsolási jelenség lezajlása után kialakuló állandósult áram szinuszos alakú lenne. Így az inhomogén egyenlet egy partikuláris megoldása a következő:
![]()
Az áram effektív értékét a feszültségből és az impedanciából határozhatjuk meg:
![]()
A fázisszög pedig a következőképpen írható fel:
![]()
A teljes megoldás a két áram összegeként adódik:
![]()
A következő feladat a c konstansértékének meghatározása. Ez abból a feltételből határozható meg, hogy a dióda zárt állapotában áram nem folyik, így a nyitóirányú feszültség megjelenésekor (t=0), ie=0:
![]()
![]()
Ha ezt visszahelyettesítjük a teljes megoldásba, az áramkörben folyó áramra a következő kifejezést kapjuk:
Az áram két komponensből áll: egy állandó amplitúdójú szinuszos és egy exponenciálisan csökkenő egyenáramú komponensből.
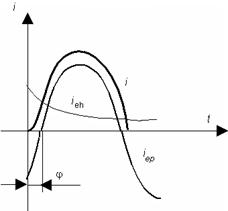
2. ábra: Az áram időfüggvénye.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2266
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved