| CATEGORII DOCUMENTE |
| Bulgara | Ceha slovaca | Croata | Engleza | Estona | Finlandeza | Franceza |
| Germana | Italiana | Letona | Lituaniana | Maghiara | Olandeza | Poloneza |
| Sarba | Slovena | Spaniola | Suedeza | Turca | Ucraineana |
| Будівництво | Електронний | Медицина | Освіта | Фінанси | географія | економіка | законодавство |
| косметика | маркетинг | математика | політика | право | психологія | різний | соціологія |
| техніка | управління | фізичний | харчування | інформацію | історія |
DOCUMENTE SIMILARE |
|
ЕЛЕКТРОПРИВОДУ ЗА СИСТЕМОЮ ЕЛЕКТРОМАШИННИЙ ПІДСИЛЮВАЧ-ДВИГУН ПОСТІЙНОГО СТРУМУ
принцип дії схеми керування та методи перевірки електромеханічних характеристик електроприводу за системою Електромашинний підсилювач- двигун постійного струму
ЗАГАЛЬНА ХАРАКТЕРИСТИКА СИСТЕМИ ЕЛЕКТРОПРИВОДУ
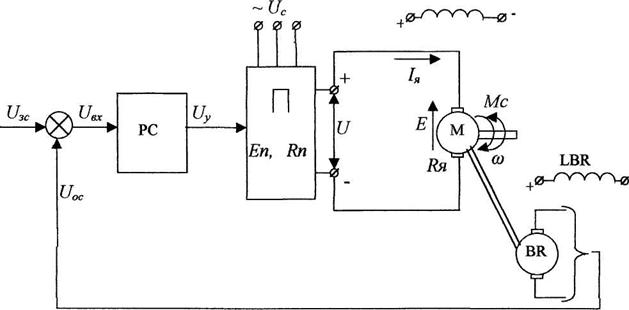
досягається за допомогою застосування системи П-Д, збудованої за замкнутим принципом. Залежно від вимог до діапазону і точності регулювання застосовуються різні зворотні зв'язки. Якщо ці вимоги не дуже жорсткі, то можливе застосування негативного зворотного зв'язку за напругою перетворювача. Схему вмикання двигуна в такій системі приведено на рис.4.1.а. Її основу складає розімкнена система П-Д. Потрібна швидкість обертання М визначається величиною сигналу завдання Uзс. Випрямлена напруга перетворювача U контролюється датчиком напруги ДН. За наявності внутрішнього активного опору перетворювача Rп випрямлена напруга залежить від струму в якірному колі М. В сталому режимі U=Еп-ІяRп. Вихідний сигнал ДН Uос=αU є сигналом зворотного зв'язку за напругою. Тут α коефіцієнт передачі датчика напруги.
Uзс і їх різниця у вигляді сигналу помилки Uвх= Uзс- Uос подається на вхід регулятора напруги РН, який з коефіцієнтом крн підсилює сигнал помилки і подає його у вигляді сигналу управління Uу= крнUвх на вхід перетворювача П.
на валу двигуна зменшується його швидкість ω і тому збільшується струм в якірному колі Ія. За рахунок збільшення падіння напруги на активному опорі перетворювача ІяRп знижується напруга на якорі М і зменшується сигнал зворотного зв'язку Uос. Це викликає збільшення сигналу помилки Uвх і сигналу управління Uу, що у свою чергу
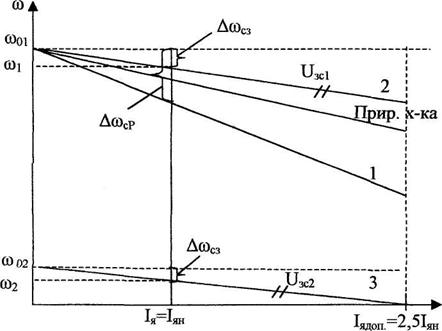
приведе до зростання ЕРС перетворювача Еп і напруги на якорі двигуна. Тим самим компенсується складова статичного падіння швидкості Δω2, визначувана величиною ІяRп. Тому пряма 2 на рис. 4.1.б, що відображає характеристику двигуна в замкнутій системі, буде розташована вище прямої 1, що відображає характеристику двигуна в розімкненій системі П-Д. Система регулювання напруги, що розглядається, є статичною, оскільки величина ІяRп збільшенням Еп компенсується не повністю. Повної компенсації падіння напруги на активному опорі перетворювача може бути досягнуто в астатичній системі регулювання напруги. У цьому випадку можна припустити, що двигун живиться від перетворювача з нульовим внутрішнім опором. При U=Uн двигуна він працюватиме на природній характеристиці. Статичне падіння швидкості під час роботи двигуна на інших характеристиках буде таким же, як і на природній.
Uзс2<Uзс1
визначається величиною сигналу завдання Uзс. Швидкість двигуна ω контролюється тахогенератором ВR. Вихідний сигнал тахогенератора Uос=βсω є сигналом зворотного зв'язку за швидкістю. Тут βс коефіцієнт передачі тахогенератора. В пристрої, що підсумовує, сигнал зворотного зв'язку віднімається із задаючого сигналу і їх різниця у вигляді сигналу помилки Uвх=кзсUос підсилює сигнал помилки і подає його у вигляді сигналу управління Uу=крсUвх на вхід перетворювача П.
LM
а)
|
|
б)
4.2. а) схема вмикання двигуна в замкнутій системі- ЕМП- Д
Uос. Це викликає збільшення сигналу помилки Uвх і сигналу управління Uу, що у свою чергу веде до зростання Еп і напруги на якорі двигуна. Тим самим
компенсуються обидва складові Δωс. При пропорційному регуляторі швидкості Δωс2 компенсується повністю, а Δωс1 частково. Система регулювання швидкості є статичною і пряма 2 на мал. 3б, що відображає характеристику двигуна в системі, що розглядається, буде розташована вище за природну характеристику. Прямою на мал. 3б зображено характеристику двигуна в статичній системі при сигналі завдання Uзс2<Uзс1.
Повна компенсація Δωс1, Δωс2 забезпечується у разі використання інтегро-пропорційного регулятора швидкості. В такій системі характеристика двигуна паралельна осі абсцис. Це дозволяє розширити діапазон регулювання швидкості до величини 10000:1 і більш і здійснювати процес регулювання при Sх=0.
примерзлого або заклиненого, в електроприводі підйому ковша екскаватора при черпанні екскаватором скельної породи або змерзлого грунту та ін. У будь-якому випадку при роботі на упор момент опору необмежено зростає. Швидкість двигуна знижується, зменшується ЕРС обертання двигуна і зростають якірний струм, величина якого визначається як Ія=(U-Е)/Rя, і момент двигуна М=кФІя. Коли двигун зупиниться, ЕРС обертання буде рівною 0. В якірному колі протікатиме струм короткого замикання Іякз=U/Rя Момент, що розвивається двигуном, названий моментом стопоріння Мст по відношенню до номінального моменту Мн не перевищуватиме перевантажувальну здатність двигуна Мст≤2,5Мн.
приведено на рис. 4.3. Як датчик струму використовується включений в якірне коло двигуна шунт з опором Rш. Падіння напруги на Rш пропорційно струму якоря Iя, тому сигнал зворотного зв'язку за струмом визначається як
Uос=βтIя
Uос перевищує за величиною деякого опорного сигналу Uоп, сигнал U'ос на виході ВСО рівний 0. При Uос> Uоп на виході ВСО з'являється сигнал негативного зворотного зв'язку U'ос, який поступає на пристрій, що підсумовує.
Uоп
Електромеханічні характеристики двигуна на рис. 4.3.б мають дві ділянки: на першому U'ос=0 розімкнуто по струму. Статізм характеристики невеликий і це сприяє підвищенню продуктивності технологічної машини.
перевищує струм відсічки Іотс, на виході ВСО з'являється сигнал U'ос і система стає замкнутою за струмом. Із зростанням Ія збільшується сигнал U'ос і, отже зменшується сигнал на вході регулятора швидкості Uвх= Uзс- Uос- U'ос. Зменшуються сигнал управління
Uу=крсUвх, ЕДС і напруга перетворювача U, що і приводить до подальшого обмеження зростання струму і моменту двигуна. Швидкість двигуна різко зменшується. Коефіцієнт передачі зворотного зв'язку за струмом
приведену на рис.4.4. Як керований перетворювач (генератора) G1 в ній використовується електромашинний підсилювач з поперечним полем типу
створює поперечний потік реакції якоря Фкз який індукує в якорі ЕРС подовжньої осі Еему що знімається зі щіток 2-2. Для компенсації реакції якоря від струму навантаження ЕМУ по подовжній осі на статорі розташовується компенсаційна обмотка КО, потік якої регулюється за допомогою опору Rк. додаткових полюсів ДП поліпшує комутацію по подовжній осі машини.
Якір генератора G1 приводиться в обертання короткозамкнутим асинхронним двигуном М1. Підключення до мережі обмотки статора М1 здійснюється через автоматичний вимикач QF1 і головні контакти магнітного пускача КМ1. У фазах А і С кіл живлення обмотки статора М1 включені чутливі елементи теплового реле КК, що захищає М1 від перевантаження. Розмикаючий контакт КК є включено в коло живлення котушки КМ1.
До якоря G1 через автоматичний вимикач QF2 і амперметр РА1 підключений якір досліджуваного двигуна М2. Обмотка збудження двигуна LM2 підключена через рубильник Q1 до незалежного джерела напруги. Струм в
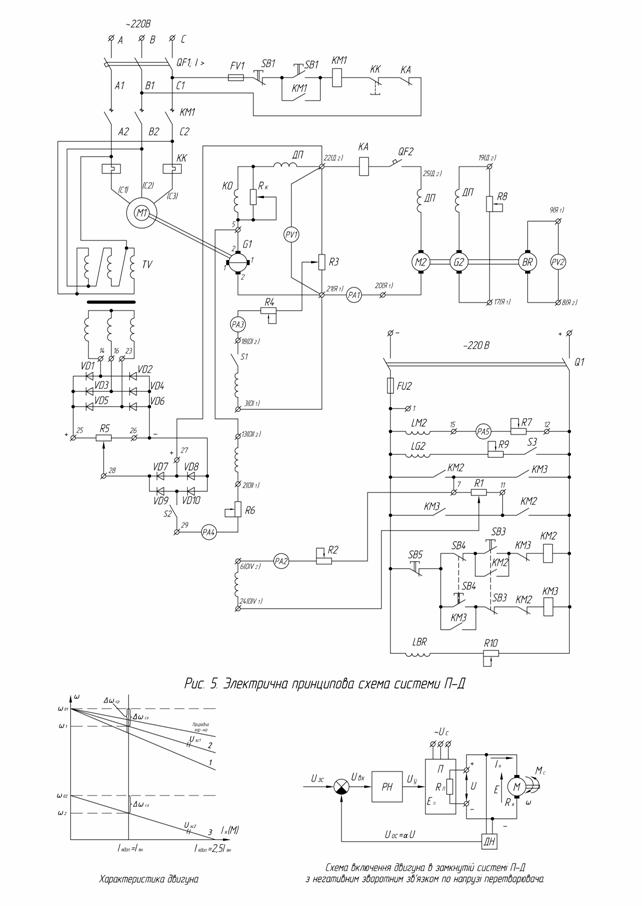
обмотці регулюється за допомогою резистора R7 і контролюється амперметром РА5. Вольтметр РV1 контролює напругу на якорі М2.
Навантаженням досліджуваного двигуна М2 є генератор G2. Вал G2 сполучений з валом М2. До якоря G2 підключений резистор R8. За його допомогою регулюється струм в якірному колі G2, а отже, і навантаження на М2. Номінальне значення струму в обмотці збудження LG2 генератора встановлюється за допомогою резистора R9.
Швидкість обертання М2 контролюється за допомогою тахогенератора BR, до якоря якого підключений вольтметр PV2. Номінальне значення струму в обмотці збудження тахогенератора LBR встановлюється за допомогою резистора R10.
Обмотка 0IV використовується як задаюча. Струм в обмотці, а отже, і створюваний нею потік регулюється за допомогою резистора R1. Полярність напруги на R1, напрям струму і потоку обмотки 0IV можуть змінюватися на протилежні, оскільки резистор включений в реверсивний міст, утворений контактами контакторів КМ2, КМ3. Керування контакторами КМ2, КМ3 здійснюється за допомогою кнопкових перемикачів SB3, SB4, SB5. Струм в обмотці 0IV контролюється амперметром РА2. Максимальна напруга, що знімається з R1, дорівнює 220В. При цій напрузі струм в обмотці 0IV за допомогою R2 встановлюється рівним 4х-кратному по відношенню до номінального струму обмотки.
Обмотка 0I ЕМУ використовуються в колі негативного зворотного зв'язку за напругою. За допомогою резистора R3 регулюється коефіцієнт передачі зворотного зв'язку. Амперметр РА3 контролює струм в обмотці, який встановлюється за допомогою R4. Потік, створюваний обмоткою 0I, направлений стрічно по відношенню до потоку, створюваного 0IV. При замиканні перемикача S1відбувається алгебраічне підсумовування сигналу завдання (потоку обмотки 0IV) і сигналу зворотного зв'язку (потоку обмотки 0I).
В сталому режимі ЕРС ЕМУ, а отже, швидкість обертання М2 визначається сумарним потоком ЕМУ, визначуваним як різниця потоків обмоток 0IV і 0I. При збільшенні Мс на валу М2 швидкість обертання М2 зменшується, а струм в якірному колі М2 збільшується. Через збільшення падіння напруги на активному опорі якоря ЕМУ зменшується напруга на якорі двигуна М2. Зменшується напруга, що знімається з резистора R3. Тому зменшується і потік, створюваний обмоткою 0I. Сумарний потік ЕМУ зростає, що приводить до зростання ЕРС ЕМУ, компенсуючому падіння напруги на активному опорі якоря ЕМУ і зменшуючому статичне падіння швидкості М2.
Обмотка 0II ЕМУ використовується в колі затриманого негативного зворотного зв'язку за струмом якоря М2. Як сигнал зворотного зв'язку, використовується падіння напруги на активному опорі компенсаційної обмотки КО і додаткових полюсів ДП ЕМУ. При замиканні перемикача S2 цей сигнал поступає на вузол струмового відсічки, виконаний на діодах VD7VD10. Опорна напруга на ВСО подається з резистора R5, який, у свою чергу, підключений до виходу трифазного випрямляча на діодах VD1 VD6. Трансформатор ТV знижує напругу мережі.
Опорна напруга з резистора R5 вимикає діоди VD7VD10. При збільшенні струму в якірному колі М2 падіння напруги на КО і ДП зростає. Припустимо, що в точці 27 полярність напруги позитивна по відношенню до полярності напруги в точці 29. При струмі якоря, рівному струму відсічки I=Iотс напруга зворотного зв'язку перевищує опорну напругу. Вмикаються діоди VD7, VD10 і через обмотку 0II починає протікати струм. Його величина контролюється амперметром РА4. Потік, створюваний обмоткою 0II, направлений зустрічно по відношенню до потоку обмотки 0IV. Тому із збільшенням струму в якірному колі М2 збільшуватиметься потік обмотки 0II і зменшується результуючий потік ЕМУ. Це у свою чергу приводитиме до зменшення ЕРС ЕМУ. При швидкості якоря М2, рівній нулю, струм в якірному колі М2 буде рівний струму стопоріння.
роботи і механічні характеристики М2, одержувані, як в розімкненій, так і в замкнутій системі ЕМП-Д; принцип дії ЕМУ і агрегату навантаження (див. розд. 3)
елементів системи ЕМП-Д..
Зібрати вимірювальну частину схеми, яка включає амперметриРА1РА5, вольтметри PV1PV2, резистори R1R8, перемикачі S1S2,випрямлячі на діодах VD1VD10. Рукоятки перемикачів S1, S2 повинні знаходитися в положенні 0.
Замкнути рубильник Q1. За допомогою R7 встановити номінальне значення струму в обмотці LМ2.
Натиснути на кнопковий перемикач SB3 і включити контактор КМ2. Визначити напрям переміщення повзунка R1, при якому струм в обмотці 0IV зростає. Перевести повзунок R1 в крайнє положення даного напряму і, за допомогою R2, встановити струм в обмотці 0IV рівним 0,8А. Потім повзунок R1 перевести в протилежний напрям.
Включити автоматичний вимикач QF1. Натиснути на кнопковий перемикач SB1 і запустити двигун М1.
ЕЕМУ=f(I0IV). За допомогою резистора R1 збільшувати струм в обмотці 0IV, і через кожні 0,025А реєструвати покази РV1 до значення 250В.Після завершення досліду повзунок R1 повернути в початковий стан.
Зняти нижню гілку характеристики холостого ходу ЕМУ, для чого натиснути на кнопковий перемикач SB4, а потім повторити дослід по п.4.7. Після завершення досліду повзунок R1 повернути в початковий стан.
Зняти електромеханічну характеристику двигуна М2 в розімкненій системі П-Д. Для чого в якірне коло G2 повністю ввести резистор R8. Перемикач S3 в колі живлення LG2 розімкнути. Включити автоматичний вимикач QF2. Збільшуючи за допомогою R1 струм в обмотці 0IV, встановити напругу на якорі М2 рівною 220В. Зафіксувати покази РА1 і РV2. Замкнути S3 і знов зафіксувати покази РА1 і РV2. Зменшуючи величину R8, через кожні 2-3А фіксувати покази РА1 і РV2. Струм в якірному колі М2 збільшувати до 15А. Після закінчення досліду повзунок R1 і рукоятку R8 повернути в початковий стан, S3 розімкнути.
Зняти електромеханічну характеристику М2 в розімкненій системі П-Д при іншому значенні задаючого сигналу. Для цього, збільшуючи за допомогою R1 струм в обмотці 0IV, встановити напругу на якорі М2рівною 110В. Зафіксувати покази РА1 і РV2. Повторити дослід за п.4.9. Після закінчення досліду повзунок R1 і рукоятку R8 повернути впочатковий стан, S3 розімкнути.
Зняти електромеханічну характеристику М2 в розімкненій системі П- ослабленому потоці, для чого за допомогою R7 встановити в обмотці LМ2 струм, рівний 0,5 від номінального значення. Потім за допомогою R1 встановити напругу на якорі М2, рівною 220В. Повторити дослід за п. 9 Після закінчення досліду повзунки R7, R1 і рукоятку R8 повернути в початковий стан, S3 розімкнути.
Зняти природну електромеханічну характеристику М2, для чого за допомогою R1 встановити напругу на якорі М2 рівним 220В. Зафіксувати покази РА1 і РV2. S3 замкнути. При цьому зменшуватимуться і покази РV1. За допомогою R1 встановити покази РV1 рівними 220В. Після цього зафіксувати покази РА1, РV2. Дослід повторити, зменшуючи величину R8 так, щоб покази РА1 збільшилися на 3-4А. Струм в якірному колі М2 збільшувати до 15А. Після завершення досліду повзунок R1 і рукоятку R8 повернути в початковий стан, S3 розімкнути.
негативним зворотним зв'язком по напрузі. Для цього рукоятку S1 перевести в положення 1. За допомогою R1 встановити напругу на якорі М2 рівною 220В. Зафіксувати покази РА1 і РV2. Повторити дослід за п.4.9. Після закінчення досліду повзунок R1 і рукоятку R8 повернути в початковий стан, S3 розімкнути.
Зняти електромеханічну характеристику М2 в замкнутій системі П-Д із негативним зворотним зв'язком за напругою та із затриманим негативним зворотним зв'язком за струмом двигуна М2. Для цього рукоятку S2 перевести в положення 1. За допомогою R1 встановити покази РV1 рівними 220В. Зафіксувати покази РА1, РV2. Замкнути S3. Зменшуючи R8, по показах РА4 визначити струм відсічки. Зафіксувати покази РА1 і РV2. Збільшувати якірний струм М2 на 2-3А і фіксувати покази РА1, РV2. Після закінчення досліду повзунок R1 і рукоятку R8 повернути в початковий стан.
Перевірити дію максимально-струмового реле КА в розімкненій системі П-Д. Для цього рукоятки S1, S2 перевести в положення 0. За допомогою R1 встановити на якорі М2 напругу 220В. Плавно зменшуючи величину R8, збільшувати струм в якірному колі М2 до моменту спрацьовування реле КА.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 3202
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2026 . All rights reserved