| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Cunoscuta firma ABB produce mai multe serii de unitati centrale: seria 40, seria 50, seria 70 si seria 90. Seriile 40 si 50 sunt destinate aplicatiilor de mica si medie complexitate cu pana la 110 intrari/iesiri. Seria 90 este destinata aplicatiilor de mare complexitate cu peste 1000 intrari/iesiri.
In cele ce urmeaza ne vom referi la seria 90 de AP, in special la modelul 07 KT 97 (fig. 1).
Mediul de programare necesar este AC 1131 si este in concordanta cu recomandarile IEC 61131. Limbajele suportate de acest mediu reprezinta toata gama de limbaje recomandate de IEC: IL, LD, FBD, SFC si ST. Programarea acestor automate este usor de realizat si depanat, mai ales din cauza simulatorului OFF-LINE..
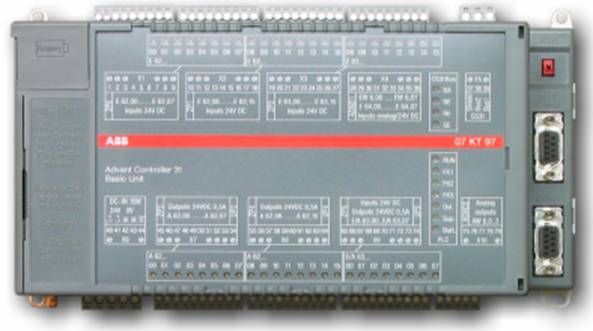
Fig. 1. Automatul ABB 07 KT 97
La fel ca la majoritatea producatorilor se poate realiza o adresare directa si indirect.
Adresarea directa trebuie sa specifice aria de memorie, dimensiunile si locatia. La seria 90 se pot adresa diferite arii de memorie: I-pentru intrari, Q-pentru iesiri si M-pentru locatii de
memorie interna. Fiecare tip de arie este precedat de caracterul % si poate avea urmatoarele prefixe: X, pentru un singur bit, B, pentru 8 biti, W, pentru 16 biti si D, pentru 32 de biti.
In cadrul programelor scrise in AC 1131 sunt recunoscute si urmatoarele adrese directe (conform recomandarilor IEC):
Adrese cu ofset pentru variabile de tip WORD: %MW<nr. cuvant>.<ofset>;
Adrese cu ofset pentru variabile de tip BYTE: %MB<nr. byte>.<ofset>;
Adrese de bit cu precizarea campului: %MX. <nr. cuvant>. <nr.bit>.
Pentru variabile se poate utiliza o adresare simbolica. Declararea unei variabile simbolice are urmatoarea sintaxa:
<identificator> : <tip> ;
unde identificator este numele simbolic al variabilei. Partea dintre acolade este optionala. Fiecare declarare de variabila poate include o initializare. In lipsa unei initializari variabilele sunt initializate cu zero. Valoarea cu care se initializeaza o variabila este o constanta care trebuie sa fie de acelasi tip cu variabila.
Mediul de programare AC 1131 suporta toate tipurile standard IEC: BOOL, BYTE, DATE, DINT, DT, DWORD, INT LREAL, REAL, SINT, STRING, TIME, UDINT, USINT, WORD.
Din punctul de vedere al unitatii in care sunt declarate variabilele acestea pot fi: variabile locale, de intrare, de iesire, de intrare/iesire si globale.
Variabilele se declara folosind cuvintele cheie VAR æi END_VAR. Sintaxa de declarare se bazeaza pe standardul IEC 1131.
Exemplu:
VAR
Lum: BOOL;
END_VAR
Variabile de intrare se declara ca mai sus, insa folosind cuvantul cheie VAR_INPUT, cele de iesire folosind cuvantul cheie VAR_OPTPUT, cele de intrare/iesire folosind cuvantul cheie VAR_INOUT, iar variabile globale se declara folosind cuvantul cheie VAR_GLOBAL.
Se pot defini variabile care isi mentin valoarea chiar dupa caderea de tensiune. In declararea acestor variabile se foloseste cuvantul cheie RETAIN.
Se pot defini variabile care isi mentin valoarea chiar dup caderea de tensiune. In declararea acestor variabile se foloseste cuvantul cheie RETAIN.
Exemplu:
VAR_RETAIN VAR_GLOBAL RETAIN
Rem1: INT; Rem2: INT;
END_VAR END_VAR
Constantele se definesc utilizand cuvantul cheie CONSTANT. Sintaxa este urmatoarea:
VAR CONSTANT
<identificator>:<tip>:=<initializare>;
END_VAR
Constantele si modul de notare in AC 1131 sunt prezentate in fig. 2.
|
Constanta |
Nr. biti |
Exemplu |
|
BOOL |
TRUE sau FALSE |
|
|
TIME |
T#10m20s30ms |
|
|
DATE |
D#1998-03-06 |
|
|
TIME_OF_DAY |
TOD#15:36:39:123 |
|
|
DATE_AND_TIME |
D_1799-03-21-15:36:30 |
|
|
REAL |
.75e+001 |
|
|
STRING |
|
'AbcsE' |
Fig. 2. Constante in AC 1131
Valorile numerice pot apare ca numere binare, octale, in baza zece sau hexazecimale. Daca un numar nu este in baza zece aceasta baza trebuie precizata si va fi urmata de caracterul #.
Exemplu:
(* numar in baza 10 *)
(* numar in baza 2 *)
(* numar in baza 8 *)
16#FF (* numar in baza 16 *)
Vom descrie in cele ce urmeaza modul de lucru cu versiunea 4.3.1 a programului. Vom presupune ca programul este instalat pe un calculator si ca exista o legatura seriala intre AP si PC prin cablul furnizat de firma ABB.
La lansarea programului 907 AC 1131 apare fereastra programului (fig. 3) care contine urmatoarele elemente:
Bara de meniu (Menu bar), localizata in partea de sus care contine toate comenzile;
Bara de unelte (Tool bar), care se afla sub bara de meniu æi care contine butoane pentru selectarea rapida a comenzilor;
Organizatorul de obiecte (Object organizer), care este in partea stanga si care contine in partea de jos patru posibilitati de selectare a obiectelor unui program;
Spatiul de lucru (Work space) in care se deschid diferitele editoare ale mediului æi managerul de biblioteca;
Fereastra de mesaje (Message windows), in care apar mesajele mediului de programare, din care cele mai importante sunt erorile si atentionarile de la compilare;
Bara de stare (Status bar) care contine informatii despre starea curenta a programului.
Pentru realizarea unui program care sa poata fi incarcat intr-un automat ABB este necesar sa se creeze in mediul de programare un proiect. Proiectul contine urmatoarele obiecte necesare unui program:
POU (Program Organization Block
Tipuri de date (Data Type);
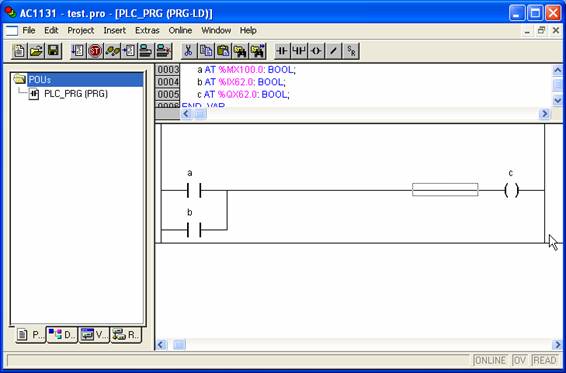
Fig. 3. Elementele ferestrei programului AC 1131
Pentru realizarea unui program care sa poata fi incarcat intr-un automat ABB este necesar sa se creeze in mediul de programare un proiect. Proiectul contine urmatoarele obiecte necesare unui program:
POU (Program Organization Block
Tipuri de date (Data Type
Vizualizari (Vizualisation);
Resurse (Resources).
Functiile, blocurile de functii si programele sunt POU. Fiecare din ele contine o parte de declaratii si corpul propriu-zis. Toate variabilele care se utilizeaza intr-un POU sunt declarate in zona de declaratii sub forma prezentata in paragraful anterior.
Corpul unui POU poate fi scris in oricare din limbajele acceptate de mediu. Un program poate apela alt program sau o functie, dar nu este permisa apelarea unui program dintr-o functie. Daca un program cheama un alt program si in acest mod variabilele din acesta se schimba, atunci aceste valori sunt memorate pana la un nou apel al programului chiar daca va fi apelat de un alt POU.
In cadrul programelor exista unul predefinit, care are numele PLC_PRG. Fiecare proiect trebuie sa contina acest program special. El este apelat de catre sistemul de operare al automatului la fiecare ciclu. Stergerea acestui program se poate face numai atunci cand se realizeaza o configurare de taskuri, in cazul in care se adopta o strategie multitasking de elaborare a aplicatiei. Vom preciza aceste lucruri mai jos.
O functie este un POU, care intoarce o singura data. Aceasta poate fi alcatuita din mai multe campuri ale unei structuri. Declararea unei functii inseamna asocierea cu un nume si un tip. Numele functiei este chiar valoarea intoarsa de functie. Declaratia unei functii are urmatoarea sintaxa:
FUNCTION <nume>:<tip>
<corpul functiei>
END_FUNCTION
Valorile transmise functiei trebuie declarate in partea de declaratii a unei functii. Pentru o functie nu se pot prevedea valori de iesire.
Un Function Block este un POU, care furnizeaza una sau mai multe valori sub forma parametrilor de iesire. Atunci cand se declara un Function Block, trebuie sa i se precizeze numele, iar valorile de intrare si de iesire trebuie precizate in partea de declaratii a acestuia.
Etapele pentru crearea si incarcarea in AP unui proiect sunt urmatoarele:
1. Crearea unui proiect se face in fereastra principala, alegand in Object Organizer indexul POU. Apoi se alege FileNew, din meniul principal. Dupa alegerea acestei optiuni se va deschide fereastra Select CPU (fig. 4). In aceasta fereastra trebuie sa se aleaga tipul de automat din lista automatelor ABB posibil sa fie programate cu mediul de programare AC 1131. Dupa ce se selecteaza automatul si se apasa butonul OK, va apare o alta fereastra New POU (fig. 5). In aceasta fereastra se lasa nemodificat PLC_PRG, dar se alege limbajul in care acesta va fi scris;
2. Dupa inserarea blocului PLC_PRG se pot vedea urmatoarele obiecte globale, in fisierul Global variables din pagina Resources:
Obiectul Systemkonstanten, care contine variabilele sistem. Aceste variabile sunt folosite pentru setarea bufferelor de transmisie si receptie, in cazul functionarii in retea a automatului, monitorizarea taskurilor, monitorizarea functiilor pentru lucrul in virgula mobila, configurarea intrarilor si iesirilor analogice, configurarea modului de functionare a contoarelor de mare viteza. Valorile acestora sunt initializate cu valori date. Pentru a schimba configurarea, trebuie modificate aceste valori, in conformitate cu documentatia pusa la dispozitie de firma;
Obiectul Fehlermerker contine flagurile erorilor de sistem;
Obiectul Auslastung contine flaguri care reflecta utilizarea automatului;
Obiectul Global_Variables este un obiect gol, in care se pot introduce variabilele globale ale programului
In cadrul paginii de resurse se selecteaza Global_Variables si se selecteaza din meniu ProjectImport. Se alege fisierul de importat, care in cazul lui 07 KT 97 va fi K97_onb.exp. Acest fisier contine declaratiile pentru toate intrarile si iesirile automatului. Deschizand cu dublu click acest fisier, se pot vedea numele simbolice care pot fi folosite pentru intrari si iesiri;
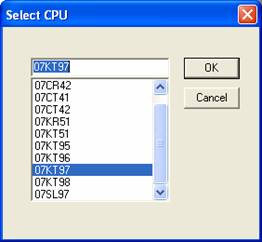
Fig. 4. Fereastra Select CPU
3. Proiectul creat contine si o biblioteca IEC_S90_V41.lib. In aceasta biblioteca se gasesc o serie de obiecte: bistabile, contoare, functii pentru manipularea stringurilor, timere si triggere. Pentru a putea folosi si alte obiecte se pot incarca biblioteci disponibile in cadrul programului de consola. Acest lucru se poate face utilizand Insert→AdditionalLibrary. Continutul fiecarei biblioteci se poate vedea imediat dupa incarcare in Library Manager. Tot aici se gasesc informatii despre utilizarea obiectelor componente.
Fig. 5. Fereastra New POU
4. Se revine in pagina POU si se trece la editarea programului PLC_PRG. Editarea acestuia se face prin lansarea automata a editorului corespunzator limbajului pentru care s-a optat la crearea programului.
EDITORUL DE TEXT
Acest editor se foloseste pentru limbajele IL si ST precum si pentru declararea variabilelor. El ofera toate facilitatile editoarelor de texte din Windows. In plus au facilitatea Sintax Coloring, adica diferite elemente ale limbajului sunt prezentate in culori diferite. Culorile implicit folosite sunt urmatoarele:
Albastru, pentru cuvinte cheie;
Verde, pentru comentarii;
Magenta, pentru constante speciale;
Rosu, pentru erori;
Negru, pentru variabile, operatori de asignare etc.
Cele mai importante comenzi ale editorului se gasesc intr-un meniu contextual, care poate fi afisat la apasarea butonului drept al mouse-ului (operator, Assign, Jump etc.).
EDITOARELE PENTRU LIMBAJUL LD SI FBD
Sunt editoare grafice si sunt alcatuite din retele. La deschiderea editorului pe ecran apare o retea initiala. Se pot adauga noi retele prin optiunile Insert→Network (before) sau Insert→Network (after). La inceput o retea are activata o zona dreptunghiulara in care se pot introduce obiecte ale limbajului folosind bara de unelte sau Insert.
EDITORUL SFC
Un POU scris in SFC este alcatuit dintr-o serie de etape, conectate intre ele prin arce si tranzitii, cu respectarea regulilor limbajului. La deschiderea editorului SFC apare automat o etapa initiala si o tranzitie. Etapele sunt de doua feluri:
Etape simple, care au asociata o actiune si un flag. Acesta din urma indica daca etapa este activa. Actiunile unei etape simple pot fi implementate in orice limbaj, prin realizarea unui dublu click pe etapa. Daca actiunea unei etape simple a fost implementata atunci va apare un triunghi in coltul din dreapta sus al etapei;
Etape IEC, care au asociate una sau mai multe actiuni si un flag care indica starea etapei. O etapa IEC are o actiune atasata, care se gaseste intr-un dreptunghi la dreapta etapei. Se pot adauga mai multe actiuni utilizand Extras→Associate Action. In cadrul unei etape actiunile pot avea mai multe atribute, care apar intr-un dreptunghi din stanga actiunii:
o N - actiune nememorata sau booleana, care este activa atat timp cat etapa este activa;
o S - actiune de setare, care este actiune memorata. O astfel de actiune ramane activa pana la o actiune de resetare;
o R - actiune de resetare;
o L - actiune limitata in timp. O astfel de actiune este activata o perioada limitata in timp, daca etapa este activa;
o D - actiune intarziata in timp. O astfel de actiune devine activa dupa trecerea unui timp dat dupa activarea etapei;
o P - actiune in impuls. O astfel de actiune este executata o singura data la activarea etapei, sub forma unui puls care dureaza un singur ciclu;
o SD - actiune memorata si intarziata in timp. O astfel de actiune este intarziata cu valoarea parametrului SD si va ramane activa pana la efectuarea unei actiuni de resetare. Setarea actiuni are loc, dupa intarzierea data, chiar daca etapa de care este legata nu mai este activa;
o SL - actiune memorata si limitata in timp. O astfel de actiune este activata la un anumit interval de timp de la activarea etapei si este si limitata in timp.
Atributele L, D, SD, SL au nevoie de o valoare atasata care este de forma unei constante de timp. Aceasta se introduce in dreptunghiul destinat atributului lasand un spatiu intre atribut si constanta (fig. 6).
![]()
Fig. 6. Declararea atributelor unei etape
Pentru etapele IEC se mai pot adauga actiuni de intrare si de iesire. O actiune de intrare se executa o singura data la activarea etapei, iar o actiune de iesire se executa o singura data la dezactivarea etapei.
Fig. 7. Exemplu de etapa cu actiuni de intrare si iesire
Adaugarea unei etape de intrare se face selectand etapa si alegand din meniu optiunea InsertAdd→Entry-Action. Dupa adaugarea unei actiuni de intrare in coltul din stanga jos al etapei apare un dreptunghi cu litera E. Adaugarea unei etape de iesire se face selectand etapa si alegand din meniu optiunea InsertAdd→Exit-Action. Dupa adaugarea unei actiuni de iesire in coltul din dreapta jos al etapei apare un dreptunghi cu litera X. O actiune de intrare sau iesire poate fi scrisa in orice limbaj. Pentru a edita o actiune de intrare sau de iesire se executa un dublu click pe coltul corespunzator. Un exemplu de etapa cu actiuni de intrare si iesire este prezentat in fig. 7.
In SFC sunt declarate implicit trei variabile: <nume etapa>.x <nume etapa>.t si <nume actiune>.x.
Variabila <nume etapa>.x este o variabila booleana care are valoarea TRUE, daca etapa este activa si FALSE, in caz contrar. In varianta SFC, fara atributul IEC aceasta variabila implicita are numele <nume etapa>
Variabila <nume etapa>.t este o variabila de tip TIME si reprezinta timpul scurs de la activarea etapei.
Variabila <nume actiune>.x ofera posibilitatea de a vedea daca o actiune este activa sau nu, ea avand valoarea TRUE daca actiunea este activa.
Daca o etapa este activa un numar de indicatori sunt setati. Acestia sunt in acelasi timp si variabile care pot fi setate cu scopul de a controla fluxul intr-un program SFC. Pentru utilizarea acestora, trebuie declarate in cadrul programului, ca variabile globale sau locale, de intrare sau iesire.
Cele mai importante flaguri sunt:
SFCInit, variabila de tip BOOL. Atunci cand aceasta variabila este setata in TRUE se trece automat in etapa initiala si celelalte flaguri sunt resetate. Etapa initiala este activa dar nu se executa;
SFCPause, variabila de tip BOOL. Atunci cand aceasta variabila devine TRUE executia diagramei SFC este oprita. Pentru repornire trebuie trecuta in FALSE;
SCFCurrentStep, variabila de tip string. In aceasta variabila este memorat numele etapei curente;
SFCErrorPOU, variabila de tip string. Aceasta variabila contine numele blocului in care apare o eroare.
Intr-un program SFC se pot realiza una sau mai multe ramuri paralele sau simultane. Ele poarta in AC 1131 denumirea de Alternative Branch si Paralel Branch.
Pentru editarea unei ramuri paralele trebuie selectata tranzitia la care se doreste realizarea unei ramuri paralele. Apoi se alege optiunea Insert→Alternative Branch. Aceasta optiune va introduce in paralel cu tranzitia selectata o alta tranzitie. Dezvoltarea ulterioara a fiecarei ramuri paralele se face prin Insert→Step-Transition.
Pentru editarea unei ramuri simultane trebuie selectata etapa pentru care se doreste realizarea unei ramuri simultane. Apoi se alege optiunea Insert→Paralel Branch. Aceasta optiune va introduce in paralel cu etapa selectata o alta etapa. Dezvoltarea ulterioara a fiecarei ramuri simultane se face prin Insert→Step-Transition.
Se vede ca pentru evitarea greselilor inserarea elementelor etapa si tranzitie se face simultan. De asemenea stergerea unui singur element nu este permisa. Se poate realiza o stergere doar daca se selecteaza elemente pereche (etapa-tranzitie) sau daca prin stergere nu se incalca regulile de constructie GRAFCET.
In mod normal derularea unui program pe un automat programabil este de tip sincron, adica exista un singur fir reprezentat de programul ciclic. Acesta poarta diferite nume: OB1, in cazul automatelor firmei SIEMENS, Main, in cazul automatelor OMRON, PLC_PRG, in cazul automatelor ABB.
La automatele ABB exista posibilitatea realizarii mai multor fire (taskuri) de executie utilizand Task Configuration, care este un obiect in cadrul indexului Resources, din Object Organizer.
Pentru a putea utiliza un task, acesta trebuie declarat. Prin declararea unui task se intelege setarea unor atribute ale acestuia:
Atribuirea unui nume;
Stabilirea unei prioritati;
Stabilirea intervalului de activare ciclica a taskului;
Stabilirea unei variabile globale pe a carui front crescator este activat taskul.
Aceste atribute pot fi declarate intr-o fereastra care se deschide atunci cand se alege optiunea InsertAppend Task. In fereastra Taskattributes, care se deschide (fig. 8) se pot seta atributele de mai sus.
Fig. Fereastra Taskattributes
Numele taskului este un identificator si este numele programului care reprezinta taskul. Pentru fiecare task trebuie sa se ataseze cel putin un program, care este apelat atunci cand taskul este activ. Prioritatea taskului este un numar cuprins intre 0 si 31. Prioritatea cea mai mare dintre doua taskuri cu numere diferite o are acela a carui numar este mai mic. Intervalul se introduce sub forma unei constante de tip TIME. In caseta Single se introduce variabila pe al carei front crescator se va activa taskul. Daca se introduce la un task atat o variabila de activare cat si un interval de activare, atunci numai intervalul de activare va fi luat in considerare.
Regulile de executie a mai multor taskuri sunt:
Se executa acel task care are conditia indeplinita: fie s-a scurs timpul de activare, fie variabila stabilita pentru activare a avut un front crescator;
Daca doua taskuri au conditii de activare simultane atunci mai intai se executa taskul cu prioritatea cea mai mare;
Daca doua taskuri au conditii de activare simultane si aceeasi prioritate, atunci se executa taskul care a stat mai mult in coada de asteptare, ceea ce insemna ca prioritatile sunt dinamice si bazate pe varsta.
Facilitatea de a putea avea mai multe taskuri este deosebit de utila mai ales pentru realizarea actiunilor la avarii a unui sistem condus de automatul programabil.
Un alt mod de utilizare a taskurilor, activate pe fronturi crescatoare ale unor variabile este acela in care se doreste realizarea unor programe care sa contina parti de reglare a conditiilor de functionare sau un mod de lucru manual al sistemului.
Vom ilustra programarea automatelor ABB utilizand limbajul SFC pentru realizarea unei automatizari avand urmatorul caiet de sarcini:
Fig. 9. Cabina de spalare
O cabina de spalare a unor obiecte de dimensiuni mari care provin de pe o linie de montaj(fig. 9) are usa de intrare si de iesire. Spre aceasta cabina vin incontinuu carucioare cu sau fara obiecte , care sunt aduse cu un lant (L). Cat timp lantul de antrenare este actionat vor sosi carucioare la intrarea cabinei. Actionarea lantului este in afara automatizarii analizate. Semnalul testat de program (LP) este provenit de la motorul de antrenare al lantului. Pentru a permite intrarea sau iesirea, usile cabinei trebuie comandate pentru deschidere si inchidere. Comanda inchiderii sau deschiderii unei usi se face printr-un semnal boolean (Ciui de exemplu este semnalul de inchiderii usii de intrare). Pozitia carucioarelor in cabine si prezenta unui obiect pe carucior este controlata prin intermediul unor traductoare cu contact si optice. Poi este semnalul boolean dat de un traductor optic care indica prezenta unui obiect pe caruciorul aflat la intrarea in cabina, iar Pci este semnalul boolean dat de un traductor cu contact care indica prezenta unui carucior (cu sau fara obiect) la intrarea in cabina.
Deoarece lungimea unui obiect (carucior sau carucior cu obiect) este mare s-a prevazut, in proiectarea mecanica, ca sa se realizeze un semnal atunci cand coada caruciorului a intrat sau a iesit din cabina. Ci este semnalul de intrare in cabina, iar Ce este semnalul la iesirea din cabina Numai dupa atingerea acestor traductoare se realizeaza inchiderea usii de intrare sau iesire.
Carucioarele sunt prinse pe lantul de antrenare astfel incat ele pot fi blocate la intrarea sau iesirea in/din cabina. Un blocator este realizat fizic ca in fig. 10. Blocarea se realizeaza atunci cand nu este alimentata bobina de comanda a distribuitorului. Semnalul de deblocare Cdb va fi generat de program.
Fig. 10. Sistemul de blocare a carucioarelor
La intrarea sau iesire se deschide usa de intrare sau de iesire inaintea deblocarii obiectului de la intrare sau iesire. Trebuie realizata si verificarea blocarii iesirii din cabina in care urmeaza sa intre caruciorul. Sistemul de blocare furnizeaza doua semnale: un semnal de functionare corecta (Bc) si unul de avarie (Ba). De asemenea pentru a permite intrarea unui carucior trebuie ca in cabina locul sa nu fie ocupat. Oricare din conditii nu este indeplinita, la orice cabina nu trebuie sa conduca la deschiderea usii. Daca blocarea nu este realizata trebuie oprit lantul de antrenare si afisat un mesaj de eroare.
Operatia de spalare este complet automatizata. Pentru acestea trebuie sa deschisa o vana care sa permita agentului sa ajunga in cabina si sa fie verificate conditiile: pompa pornita si functionare corecta a vanei comandate. Aceste conditii sunt verificate cu ajutorul unor traductoare de presiune (semnalele pentru prima cabina sunt Pdgf si Pdg). Daca nu este indeplinita una din conditii trebuie afisat un mesaj de eroare si programul trebuie sa astepte remedierea defectului.
Sa se realizeze programul pentru automatizarea operatiei de spalare cu un automat ABB 07 KT 97.
Programul este prezentat in fig. 11.
Graful alcatuit din etapele S12 si S13 este destinat memorarii prezentei unui obiect de spalat pe un carucior. Se vede ca, daca etapa S13 este activa, atunci cu siguranta a intrat un carucior cu obiect de spalat pe el in cabina.
Fig. 11. Programul pentru automatul ABB 07 KT 97
1. Se va folosi programul AC1131 pentru realizarea si incarcarea programului de conducere pentru problema rezolvata in paragraful 7. Programul va fi verificat utilizand intreruptoare pentru conditiile de parcurgere a tranzitiilor, iar pentru vizualizarea iesirilor se vor folosi LED-urile de pe panoul automatului;
2. Se va intocmi programul pentru automatul 07 KT 97 pentru urmatorul caiet de sarcini:
Un sistem pentru debitare semifabricatelor este prezentat in fig. 13. Avansul se realizeaza cu ajutorul cilindrului pneumatic C , prin comanda ventilului Y . Strangerea se realizeaza cu cilindrii pneumatici C si C comandati de ventilele Y si respectiv Y . Mai intai se comanda strangerea cu cilindrul C , apoi deplasarea. Deplasarea este controlata cu traductoarele S si S . Dupa atingerea pozitiei data de traductorul S , se realizeaza strangerea si cu cilindrul C . Dupa aceasta se comanda debitarea, prin deplasarea pistonului hidraulic P, pana la atingerea pozitiei marcate de traductorul S . Comanda electrica Y este necesara pentru avansul capului de debitare. Dupa debitare se retrage capul de debitare pana in pozitia marcata de traductorul S . Comanda electrica Y este necesara pentru retragere. Apoi se desface bara si se deplaseaza cilindrul C in pozitia initiala. Sa se intocmeasca graful de comanda si programul pentru un automat 07 KT 97 in limbajul SFC.
fig. 13. Masina de debitat semifabricate
Referatul prezentat pe caietul de laborator pentru validarea lucrari va contine:
Graful automatizarii;
Programul de comanda pentru automatul 07 KT 97.
Lucrarea se considera validata daca, dupa incarcarea programului in automat se realizeaza caietul de sarcini.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 2124
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved