| CATEGORII DOCUMENTE |
| Aeronautica | Comunicatii | Electronica electricitate | Merceologie | Tehnica mecanica |
Masinile electrice sunt dispozitive care transforma energia mecanica in energie electrica, atunci cand functioneaza in regim de generator sau energia electrica in energie mecanica, cand functioneaza in regim de motor. Daca masina primeste atat energie electrica cat si energie mecanica (la arborele masinii) si cele doua energii se transforma prin pierderi in caldura, atunci masina functioneaza in regim de frana electromagnetica. In general functionarea masinilor electrice este reversibila, adica aceeasi masina poate functiona si ca generator si ca motor.
Exista un grup de masini, numite convertizoare de frecventa, care transforma energia electrica de c.a. cu o anumita frecventa in energie electrica cu o alta frecventa.
In practica se intalneste cel mai des functionarea in regim de motor si in regim de generator. Motorul electric este alimentat de la o retea de c.a. sau c.c. si dezvolta, la arbore, o putere mecanica. Generatorul electric este antrenat, in miscarea de rotatie de un motor exterior (electric, termic, hidraulic etc.) si debiteaza energie electrica pe o retea de c.a. sau c.c. (in functie de tipul generatorului).
Masina asincrona este compusa din doua parti: o parte fixa, numita stator si o parte mobila, care de regula executa o miscare de rotatie, numita rotor.
Statorul masinii asincrone trifazate este format dintr-o carcasa din fonta sau otel turnat, in interiorul careia este asezat un miez din otel electrotehnic, de forma inelara, asamblat din tole cu grosimea de 0,35 sau 0,5 mm. Tolele sunt izolate intre ele. Pe suprafata interioara a miezului, in lungul generatoarei, exista crestaturi sau santuri in care se introduc conductoarele infasurarii statorului. In figura 5.27 este reprezentata schematic, o sectiune transversala prin statorul unui motor asincron trifazat, prevazut la partea inferioara cu o talpa, necesara fixarii motorului pe un postament.
Infasurarea statorica, la motorul asincron trifazat, este formata din trei infasurari monofazate, independente, plasate in crestaturi si defazate intre ele cu un unghi de 1200. Capetele infasurarilor sunt scoase la o placuta de borne si conectate in stea sau triunghi.
 Cea mai simpla
infasurare, compusa din trei bobine asezate in sase
crestaturi (bobinaj intr-un strat), este reprezentata in fig.5.28a,
iar in fig.5.28b s-a reprezentat schema de amplasare a celor trei bobine (in
crestaturi s-a figurat cate un singur conductor, in realitate sunt mai
multe conductoare emailate sau izolate cu bumbac si carton electrotehnic
fata de miezul de otel).
Cea mai simpla
infasurare, compusa din trei bobine asezate in sase
crestaturi (bobinaj intr-un strat), este reprezentata in fig.5.28a,
iar in fig.5.28b s-a reprezentat schema de amplasare a celor trei bobine (in
crestaturi s-a figurat cate un singur conductor, in realitate sunt mai
multe conductoare emailate sau izolate cu bumbac si carton electrotehnic
fata de miezul de otel).
Considerand momentul cand curentul prin faza A-X este pozitiv, iar prin fazele B-Y si C-Z negativ, adica tinand cont de sensul curentilor prin conductoare la un moment dat, se observa ca se formeaza un camp magnetic cu doi poli (p=1); zonele statorice in care liniile de camp magnetic ies din stator constituie un pol nord.
S-a aratat
ca daca trece un curent alternativ trifazat prin trei bobine,
decalate intre ele cu un unghi de 1200 apare un camp magnetic, care
se roteste cu viteza unghiulara egala cu pulsatia
curentului alternativ trifazat, adica se poate scrie ![]() (aceasta in cazul
p=1).
(aceasta in cazul
p=1).
In constructia masinilor electrice se urmareste ca infasurarile sa formeze in intrefier, campuri magnetice cu o distributie spatiala a inductiei cat mai apropiata de o functie sinusoidala. In acest scop se utilizeaza infasurari cu mai multe bobine pe faza (mai multe crestaturi pe pol si faza). In fig.5.29a) si b) se arata modul de realizare a unei infasurari monofazate cu trei crestaturi pe pol si faza. Infasurarea cu p=1 se obtine asezand si celelalte doua infasurari monofazate decalate in spatiu astfel incat axele polilor sa formeze unghiuri de 1200.
In cazul cand infasurarea se
construieste pentru mai multe perechi de poli, asezarea celor trei
faze se face in asa fel incat defazajul de 1200 (grade
electrice) sa corespunda la 1200/p.(grade geometrice). De
exemplu, pentru o infasurare cu p=2 si cu q=2 crestaturi pe
pol si faza statorul trebuie sa aiba ![]()
crestaturi si defazajul intre infasurari trebuie sa fie 120/2=600 (grade geometrice). Reprezentarea schematica este data in fig.7.4, unde se poate vedea ca defazajul intre doua faze alaturate este de patru crestaturi, adica de 600 geometrice (unghiul corespunzator unei crestaturi este de 360/24=150).
Distanta ![]() , masurata intre axele a doi poli
alaturati se numeste pas polar.
, masurata intre axele a doi poli
alaturati se numeste pas polar.
Rotorul masinii asincrone este format dintr-un ax de otel pe care se asambleaza tole circulare de otel electrotehnic, izolate intre ele cu lac sau prin oxidare. La periferia rotorului, care este de forma cilindrica, sunt distribuite uniform, in lungul generatoarei, crestaturi sau santuri, in care se introduc conductoarele infasurarii rotorului. Dupa modul de executie a infasurarii rotorului, se distinge:
a) rotor bobinat sau cu inele colectoare;
b) rotor in scurtcircuit sau in colivie.
Rotorul bobinat are infasurarea executata sub forma de bobine, la fel ca infasurarea unui stator. Cele trei faze sunt conectate in stea, capetele libere fiind legate la trei inele colectoare, fixate pe axul rotorului, izolate intre ele si fata de ax. Pe inele se aplica cate o perie din carbune metalizat (bronz-grafit), prin intermediul carora se face legatura la un reostat de pornire trifazic, conectat in stea.
 Rotorul in scurtcircuit are infasurarea executata din
bare de aluminiu, formate prin turnare, crestaturile fiind inchise. Barele
sunt scurtcircuitate in ambele parti ale rotorului prin doua
inele de aluminiu, formate tot prin turnare. Infasurarea rotorului
reprezentata schematic, apare sub forma unei colivii (fig.5.31).
Intrefierul masinilor asincrone trebuie sa fie cat mai mic (cca. 0,25
Rotorul in scurtcircuit are infasurarea executata din
bare de aluminiu, formate prin turnare, crestaturile fiind inchise. Barele
sunt scurtcircuitate in ambele parti ale rotorului prin doua
inele de aluminiu, formate tot prin turnare. Infasurarea rotorului
reprezentata schematic, apare sub forma unei colivii (fig.5.31).
Intrefierul masinilor asincrone trebuie sa fie cat mai mic (cca. 0,25![]() 0,4 mm).
0,4 mm).
Schemele electrice ale masinii asincrone cu rotorul in scurtcircuit si bobinat sunt prezentate in figurile: 5.32a si 5.32b.
 |

Prin legarea infasurarii statorului la o
retea de c.a. trifazat, prin cele trei faze va trece un curent alternativ
care va da nastere la un camp magnetic pulsativ. Prin suprapunerea celor
trei campuri magnetice pulsative, monofazate, va apare un camp magnetic
rezultant care va fi rotitor.
Notand cu ![]() - viteza unghiulara a campului magnetic invartitor
statoric, se poate scrie relatia:
- viteza unghiulara a campului magnetic invartitor
statoric, se poate scrie relatia:
![]() (5.24)
(5.24)
Daca inlocuim ![]() si
si ![]() , in relatia (5.24), unde n1 reprezinta
numarul de rotatii pe minut a campului statoric, rezulta:
, in relatia (5.24), unde n1 reprezinta
numarul de rotatii pe minut a campului statoric, rezulta:
![]() (rot/min) (5.25)
(rot/min) (5.25)
Campul magnetic
invartitor induce in infasurarea rotorului cate o t.e.m. in fiecare
faza. Daca circuitul infasurarii rotorului este inchis
(in cazul rotorului in scurtcircuit aceasta conditie este
indeplinita intotdeauna), atunci prin cele trei infasurari
rotorice va circula cate un curent. Cei trei curenti rotorici vor forma un
sistem trifazat simetric. Asupra conductoarelor strabatute de
curentii rotorici, care sunt situate in campul magnetic invartitor
statoric, se vor exercita forte electromagnetice, a caror valoare
instantanee este: ![]()
Rezultanta acestor
forte va produce un cuplu, care va determina miscarea de rotatie
a rotorului si deci masina asincrona va functiona ca motor.
Rotorul se va invarti cu viteza unghiulara ![]() , in sensul de rotatie a campului invartitor statoric.
, in sensul de rotatie a campului invartitor statoric.
Cand infasurarea rotorica nu este strabatuta de curent, adica atunci cand circuitul rotoric este deschis (de ex., periile de pe inelele colectoare sunt ridicate), nu vor apare forte electromagnetice si deci rotorul nu se va invarti. In aceasta situatie masina asincrona se comporta ca un transformator ce functioneaza in gol.
La functionarea
masinii asincrone in regim de motor viteza unghiulara ![]() va fi intotdeauna mai
mica decat
va fi intotdeauna mai
mica decat ![]() . Daca presupunem
. Daca presupunem ![]() =
=![]() inseamna ca liniile de camp magnetic invartitor
statoric nu intersecteaza conductoarele infasurarii
rotorice, deci nu se induc t.e.m. si ca urmare nu vor apare curentii
rotorici si nici fortele electromagnetice, adica cuplul
motorului va fi zero.
inseamna ca liniile de camp magnetic invartitor
statoric nu intersecteaza conductoarele infasurarii
rotorice, deci nu se induc t.e.m. si ca urmare nu vor apare curentii
rotorici si nici fortele electromagnetice, adica cuplul
motorului va fi zero.
Deoarece aceste motoare functioneaza cu o turatie mai mica decat a campului magnetic invartitor, ele se numesc motoare asincrone, iar turatia campului magnetic invartitor se mai numeste turatie de sincronism.
La trecerea
curentului rotoric prin conductoarele infasurarii rotorului, se
va forma un camp magnetic propriu rotoric, care va fi un camp magnetic indus. Infasurarea
rotorica fiind trifazata, cu acelasi numar de poli ca
si infasurarea statorica, cele trei faze fiind decalate
intre ele cu acelasi unghi de 1200 si strabatute
de curenti rotorici, ce va forma un camp magnetic rotoric (invartitor),
care fata de rotor va avea viteza unghiulara ![]() unde
unde ![]() reprezinta pulsatia curentului rotoric.
Fata de stator, campul magnetic invartitor rotoric se va invarti cu viteza
unghiulara
reprezinta pulsatia curentului rotoric.
Fata de stator, campul magnetic invartitor rotoric se va invarti cu viteza
unghiulara ![]() egala cu cea a
campului invartitor statoric
egala cu cea a
campului invartitor statoric ![]() . Cele doua campuri invartitoare, statoric si
rotoric, fiind sincrone vor da un camp rezultant, care va ramane constant,
indiferent de regimul de functionare a rotorului. De exemplu, daca
sarcina motorului creste (cuplul rezistent la arbore se mareste),
va creste si cuplul motor pentru a echilibra cresterea cuplului
rezistent, insa aceasta crestere a cuplului motor va fi
data de cresterea fortelor electromagnetice, respectiv de
cresterea curentului rotoric, care
duce la cresterea campului magnetic rotoric. Campul magnetic rotoric fiind
un camp indus, tinde sa micsoreze campul magnetic rezultant si
din aceasta cauza, adica pentru a se mentine constant, trebuie sa
creasca campul inductor statoric, respectiv curentul statoric .Iata,
deci, ca o crestere a sarcinii motorului (a cuplului rezistent),
antreneaza in mod automat o cresterea curentului statoric.
. Cele doua campuri invartitoare, statoric si
rotoric, fiind sincrone vor da un camp rezultant, care va ramane constant,
indiferent de regimul de functionare a rotorului. De exemplu, daca
sarcina motorului creste (cuplul rezistent la arbore se mareste),
va creste si cuplul motor pentru a echilibra cresterea cuplului
rezistent, insa aceasta crestere a cuplului motor va fi
data de cresterea fortelor electromagnetice, respectiv de
cresterea curentului rotoric, care
duce la cresterea campului magnetic rotoric. Campul magnetic rotoric fiind
un camp indus, tinde sa micsoreze campul magnetic rezultant si
din aceasta cauza, adica pentru a se mentine constant, trebuie sa
creasca campul inductor statoric, respectiv curentul statoric .Iata,
deci, ca o crestere a sarcinii motorului (a cuplului rezistent),
antreneaza in mod automat o cresterea curentului statoric.
Curentul rotoric depinde de t.e.m. indusa
in infasurarea rotorica, care la randul sau depinde de
viteza cu care liniile de camp magnetic invartitor intersecteaza
conductoarele infasurarii rotorului. Pentru ca aceasta
viteza sa creasca , odata cu cresterea cuplului
rezistent la arbore, trebuie ca rotorul sa se invarta mai lent.
Modificarea vitezei unghiulare ![]()
![]() si a curentului
rotoric se face automat.
si a curentului
rotoric se face automat.
Notam cu ![]()
![]() ,
viteza unghiulara cu care liniile de camp magnetic invartitor
intersecteaza conductoarele rotorului, respectiv viteza relativa a
campului magnetic invartitor statoric fata de rotor. Se numeste alunecare si se
noteaza cu s, raportul intre si cs, adica:
,
viteza unghiulara cu care liniile de camp magnetic invartitor
intersecteaza conductoarele rotorului, respectiv viteza relativa a
campului magnetic invartitor statoric fata de rotor. Se numeste alunecare si se
noteaza cu s, raportul intre si cs, adica:
![]() (5.26)
(5.26)
Alunecarea
caracterizeaza gradul de ramanere in urma a rotorului
fata de campul magnetic invartitor statoric. Daca in
relatia (5.76) exprimam vitezele
unghiulare in functie de vitezele de rotatie, folosind
relatiile:  si
si ![]()
![]() (cu n1 si
n2, vitezele campului magnetic invartitor si ale
rotorului), atunci relatia alunecarii ia forma:
(cu n1 si
n2, vitezele campului magnetic invartitor si ale
rotorului), atunci relatia alunecarii ia forma:
![]() (5.27)
(5.27)
La pornire n2=0
si deci s=1, iar la sincronism ![]() si
deci s=0
si
deci s=0
Alunecarea
motoarelor asincrone, in general, variaza la sarcina nominala
intre 3% si 6%. Pulsatia curentului rotoric se poate deduce din
relatia: ![]() si deci: =p =p s cs
si deci: =p =p s cs
sau: ![]() si deci :
si deci : ![]()
![]() sau
sau
![]() (5.28)
(5.28)
Considerand ![]()
![]() , rezulta
, rezulta ![]() , deci o frecventa mica.
, deci o frecventa mica.
Masina asincrona trifazata, functionand in regim de motor, primeste energie electrica de la retea si o transforma in energie mecanica, la arbore. In masina au loc mai multe transformari de energie, dupa cum urmeaza:
in stator o parte din energia electrica primita de la retea se transforma in energie termica, datorita rezistentei ohmice a infasurarii statorice, constituind pierderile de energie in cupru; o alta parte se transforma tot in energie termica datorita fenomenului de histerezis si a curentilor turbionari, constituind pierderile de energie in fier; restul energiei se transmite rotorului prin intrefier, pe cale electromagnetica;
in rotor energia
electromagnetica primita de la stator se va transforma astfel: o
parte se transforma in energie termica datorita rezistentei
ohmice a infasurarii rotorice, constituind pierderile de energie
in cupru (sau aluminiu); o alta parte se transforma tot in energie
termica datorita fenomenului de histerezis si curentilor
turbionari din rotor, reprezentand pierderile in fier (sunt mici datorita
faptului ca frecventa curentului rotoric este mica (1,5![]() 3 Hz) si de obicei se neglijeaza); o alta parte se
transforma in energie mecanica pentru a acoperi frecarile in
palierele masinii, frecarile cu aerul ale rotorului si
ventilatorului iar restul energiei electromagnetice se transforma in
energie mecanica si se transmite la arbore rotorului fiind
preluata de mecanismul (utilajul) antrenat de motor (de exemplu: strung,
pompa, ventilator, etc.).
3 Hz) si de obicei se neglijeaza); o alta parte se
transforma in energie mecanica pentru a acoperi frecarile in
palierele masinii, frecarile cu aerul ale rotorului si
ventilatorului iar restul energiei electromagnetice se transforma in
energie mecanica si se transmite la arbore rotorului fiind
preluata de mecanismul (utilajul) antrenat de motor (de exemplu: strung,
pompa, ventilator, etc.).
 Bilantul acestor
transformari de energie este reprezentat in fig.5.33 sub forma unui
bilant de puteri. S-a notat: P1- puterea electrica
primita de stator de la retea;
Bilantul acestor
transformari de energie este reprezentat in fig.5.33 sub forma unui
bilant de puteri. S-a notat: P1- puterea electrica
primita de stator de la retea; ![]() si
si ![]() pierderile de putere in cuprul infasurarilor statorului
si rotorului;
pierderile de putere in cuprul infasurarilor statorului
si rotorului; ![]() si
si![]() - pierderile de putere in fierul statorului si rotorului ; Pr -
puterea transmisa rotorului pe cale electromagnetica;
- pierderile de putere in fierul statorului si rotorului ; Pr -
puterea transmisa rotorului pe cale electromagnetica; ![]() - pierderi mecanice de putere; PM - puterea
mecanica utila la arborele rotorului.
- pierderi mecanice de putere; PM - puterea
mecanica utila la arborele rotorului.
Intre aceste puteri se pot scrie relatiile:
![]()
![]() (5.29)
(5.29)
Puterea
mecanica ![]() , in functie de momentul cuplului motor M, este:
, in functie de momentul cuplului motor M, este:
![]() (5.30)
(5.30)
Puterea electromagnetica transmisa de stator, rotorului, se va scrie in mod asemanator:
![]() (5.31)
(5.31)
Din relatiile (5.29), (5.30) si (5.31) rezulta :
![]() , sau :
, sau : ![]()
Dar,
∆PFe2 se neglijeaza si ![]() (R2
reprezinta rezistenta ohmica a infasurarii
rotorului, pentru o faza) si
(R2
reprezinta rezistenta ohmica a infasurarii
rotorului, pentru o faza) si ![]() si deci :
si deci :
![]() (5.32)
(5.32)
Curentul rotoric I2 poate fi exprimat in functie de t.e.m. E2 indusa in infasurarea de impedanta Z2 , a rotorului cu relatia:
unde ![]() este fluxul magnetic
maxim, care ramane constant, indiferent de sarcina masinii, daca
tensiunea de la retea este constanta. Rezulta:
este fluxul magnetic
maxim, care ramane constant, indiferent de sarcina masinii, daca
tensiunea de la retea este constanta. Rezulta:
![]() (5.33)
(5.33)
Se
observa ca momentul cuplului electromagnetic este proportional
cu ![]() . Fluxul magnetic fiind proportional cu tensiunea
retelei aplicata statorului, rezulta ca momentul cuplului
motor depinde de patratul tensiunii de la retea. Aceasta constituie
un dezavantaj pentru motoarele trifazate asincrone, deoarece momentul cuplului
motor este sensibil la variatiile de tensiune( de exemplu, daca tensiunea
de la retea scade cu 10% momentul cuplului motor scade cu 19%, deoarece
. Fluxul magnetic fiind proportional cu tensiunea
retelei aplicata statorului, rezulta ca momentul cuplului
motor depinde de patratul tensiunii de la retea. Aceasta constituie
un dezavantaj pentru motoarele trifazate asincrone, deoarece momentul cuplului
motor este sensibil la variatiile de tensiune( de exemplu, daca tensiunea
de la retea scade cu 10% momentul cuplului motor scade cu 19%, deoarece ![]() )
)
![]() Impedanta
infasurarii rotorului Z2 , se poate scrie sub forma:
Impedanta
infasurarii rotorului Z2 , se poate scrie sub forma:
![]()
sau tinand cont de relatia (5.28):
![]()
![]()
![]() si notand
si notand ![]() , rezulta ca
, rezulta ca
![]()
relatia (5.33) devine:
sau  (5.34)
(5.34)
Intrucat alunecarea variaza intre 1 (la pornire) si zero (la sincronism) se observa ca la sincronism momentul cuplului este zero , iar la pornire ponderea reactantei X2s este mai importanta decat a rezistentei ohmice R2/s. In regim de turatie constanta, cand alunecarea este mica, termenul R2/s va avea o pondere mai mare decat reactanta X2s. Graficul de variatie M(s) este prezentat in figura 5.34, valoarea maxima Mmax, determinandu-se prin rezolvarea ecuatiei : dM/ds= 0. Din rezolvarea acestei ecuatii rezulta:
![]()
si
![]() (5.35)
(5.35)
![]() Se observa
ca Mmax nu depinde de rezistenta ohmica a
infasurarii rotorului si ca este proportional cu
Se observa
ca Mmax nu depinde de rezistenta ohmica a
infasurarii rotorului si ca este proportional cu ![]() , adica este direct proportional cu patratul
tensiunii de la retea. De asemenea se observa ca valoarea
alunecarii am, pentru care momentul cuplului este maxim, este
direct proportionala cu rezistenta R2 a unei infasurari
rotorice ( a unei faze).
, adica este direct proportional cu patratul
tensiunii de la retea. De asemenea se observa ca valoarea
alunecarii am, pentru care momentul cuplului este maxim, este
direct proportionala cu rezistenta R2 a unei infasurari
rotorice ( a unei faze).
Pe caracteristica M(s) se pot delimita cele trei regimuri de functionare ale masinii asincrone:
regimul motor, cand alunecarea variaza intre valorile 1 la pornire si zero la sincronism;
regimul de generator cand alunecarea ia valori negative; aceasta situatie se poate apare cand turatia motorului devine mai mare decat turatia campului magnetic invartitor statoric, adica atunci cand masina primeste energie mecanica la arbore si o transforma in energie electrica;
regimul de frana electromagnetica, cand alunecarea devine mai mare decat 1, adica atunci cand rotorul se va invarti in sens invers fata de campul magnetic invartitor statoric;
In practica, functionarea masinii asincrone in regim motor se intalneste foarte des. Regimul de generator nu se foloseste decat in mod intamplator (de exemplu in cazul tractiunii electrice, cand vehiculul coboara o panta si deci masina asincrona, fiind legata la retea si primind energie cinetica, o va transforma in energie electrica, daca rotorul se va invarti cu o turatie mai mare decat cea a campului magnetic invartitor ).
Functionarea in regim de frana electromagnetica se foloseste de cele mai multe ori la instalatiile de ridicat si transportat, la coborarea sarcinii. In aceasta situatie, rotorul, invartindu-se in sens invers, primeste atat energie electrica cat si energie mecanica si le transforma in caldura prin efect Joule -Lenz in rezistenta rotorului, acoperind astfel, in parte, pierderile mecanice si in fierul rotoric ale masinii. Pierderile in fierul rotoric, in acest regim, sunt relativ mari, deoarece frecventa curentilor rotorici este mare (f2=sf>f1).
Un alt exemplu de functionare in regim de frana electromagnetica este urmatorul: sa consideram ca masina asincrona a functionat ca un motor, antrenand un mecanism oarecare; daca se decupleaza motorul de la retea, rotorul va continua sa se roteasca inertial. In vederea franarii rapide, imediat dupa decuplare se inverseaza doua faze si se recupleaza la retea. Se stie ca la inversarea a doua faze , campul magnetic invartitor isi schimba sensul de rotatie si deci masina va intra in regim de frana electromagnetica. O asemenea franare se numeste franare prin contra-conectare a motorului. Pentru ca dupa oprirea rotorului, el sa nu intre din nou in regim de motor, cu sens invers de rotire, trebuie ca alimentarea infasurarii statorice sa fie intrerupta. In practica acest lucru se realizeaza cu ajutorul unor scheme de actionare, care vor fi prezentate in cadrul capitolului de actionari electrice.
In
fig.5.34 se arata si pozitia momentului cuplului nominal Mn,
dezvoltat de motorul asincron. De obicei Mmax=(1,5![]() 3)Mn.. Cu cat motorul functioneaza in
conditii mai grele cu socuri de cuplu(laminoare, macarale, foraj),
care pot depasi cuplul nominal, cu atat Mmax trebuie
sa fie mai mare, din motive de siguranta.
3)Mn.. Cu cat motorul functioneaza in
conditii mai grele cu socuri de cuplu(laminoare, macarale, foraj),
care pot depasi cuplul nominal, cu atat Mmax trebuie
sa fie mai mare, din motive de siguranta.
Din caracteristica M(s), vezi fig.5.34, se observa ca pentru acelasi cuplu rezistent Mr1 sunt posibile doua puncte de functionare A si B, la alunecari diferite. Motorul insa nu poate functiona stabil decat in punctul A, adica pe portiunea crescatoare a caracteristicii M(s).
Analiza functionarii motorului asincron trifazat pe caracteristica M(s). Sa consideram la arborele motorului un cuplu rezistent Mr. Motorul poate porni in sarcina numai daca cuplul de pornire Mp este mai mare decat cuplul rezistent Mr. In aceasta situatie motorul porneste in sarcina si turatia motorului creste (alunecarea scade) pana cand se indeplineste relatia de regim permanent:
M=Mr (5.36)
 dupa care turatia rotorului ramane constanta. In
cazul cuplului rezistent Mr, conditia (5.36) se
indeplineste in punctul P (fig.5.35), corespunzatoare unei
alunecari ap. Daca la arbore exista un cuplu
rezistent
dupa care turatia rotorului ramane constanta. In
cazul cuplului rezistent Mr, conditia (5.36) se
indeplineste in punctul P (fig.5.35), corespunzatoare unei
alunecari ap. Daca la arbore exista un cuplu
rezistent ![]() motorul asincron nu
poate porni in sarcina. Totusi motorul poate prelua aceasta
sarcina, fiind ponit in gol si apoi se cupleaza sarcina mecanica
la arbore, pentru functionarea in regim permanent cu aceasta
sarcina, nu depaseste puterea nominala a motorului.
motorul asincron nu
poate porni in sarcina. Totusi motorul poate prelua aceasta
sarcina, fiind ponit in gol si apoi se cupleaza sarcina mecanica
la arbore, pentru functionarea in regim permanent cu aceasta
sarcina, nu depaseste puterea nominala a motorului.
Sa consideram ca motorul functioneaza cu un cuplu rezistent la arbore Mr si ca acesta are o crestere pana la Mr1. In aceasta situatie momentul cuplului motor va creste pana cand se va indeplini conditia (5.36) si deci alunecarea se va mari pana la valoarea sA, respectiv turatia motorului se va micsora. Deplasarea punctului de functionare A pe caracteristica M(s) se poate face pana la valoarea corespunzatoare alunecarii maxime am, dupa care, daca cuplul rezistent continua sa creasca, nu va mai fi indeplinita conditia (5.36), adica momentul cuplului motor nu va creste pentru a echilibra cresterea cuplului rezistent, ci se va micsora si deci functionarea motorului intr-un punct B va fi instabila.
In concluzie, la caracteristica M(s) intereseaza numai portiunea corespunzatoare alunecarilor cuprinse intre 0 si sm.
Principalele caracteristici de functionare ale motorului asincron trifazat sunt:
caracteristica mecanica, analizata in paragraful anterior;
caracteristica randamentului;
- caracteristica factorului de putere;
Caracteristica mecanica. Caracteristica M(s) poate fi reprezentata si sub forma M(n2), daca se inlocuieste variabila s prin variabila n2=(1-s)n1, n1 fiind turatia de sincronism . Explicitand turatia rotorului n2 in functie de momentul cuplului motor se obtine functia n2(M), care reprezentata grafic are aspectul din fig.5.36 Aceasta caracteristica poarta denumirea de caracteristica mecanica a motorului asincron, care uneori este reprezentata si sub forma n2 in functie de puterea mecanica a motorului, adica n2(P2).
 Portiunii instabile din caracteristica M(s) ii corespunde , in
caracteristica mecanica, portiunea reprezentata prin linie
intrerupta. Ca forma, cele doua caracteristici n2(M)
si n2(P2) difera foarte putin , intrucat
puterea utila P2 este produsul dintre momentul cuplului motor
si turatia n2 din care se scad pierderile mecanice prin
frecari.
Portiunii instabile din caracteristica M(s) ii corespunde , in
caracteristica mecanica, portiunea reprezentata prin linie
intrerupta. Ca forma, cele doua caracteristici n2(M)
si n2(P2) difera foarte putin , intrucat
puterea utila P2 este produsul dintre momentul cuplului motor
si turatia n2 din care se scad pierderile mecanice prin
frecari.
Puterii nominale P2n
ii corespunde turatia nominala n2n , care este cu 3![]() 6% mai mica decat turatia de sincronism. Din
aceasta cauza se spune ca motorul asincron are o
caracteristica rigida, adica la diferite valori ale sarcinii la
arbore, turatia motorului se modifica foarte putin.
6% mai mica decat turatia de sincronism. Din
aceasta cauza se spune ca motorul asincron are o
caracteristica rigida, adica la diferite valori ale sarcinii la
arbore, turatia motorului se modifica foarte putin.
Caracteristica
randamentului reprezinta variatia randamentului in
functie de puterea utila ![]() , atunci cand tensiunea si frecventa tensiunii de
alimentare a statorului raman constante. Se stie ca
, atunci cand tensiunea si frecventa tensiunii de
alimentare a statorului raman constante. Se stie ca ![]() , insa
, insa ![]() , in care
, in care ![]() reprezinta pierderile
de putere ale motorului si anume: pierderile in stator
reprezinta pierderile
de putere ale motorului si anume: pierderile in stator ![]() si pierderile in
rotor
si pierderile in
rotor ![]() .
.
Randamentul
motorului asincron atinge valoarea maxima intre ![]() % din puterea nominala si are valori de
% din puterea nominala si are valori de ![]() %. Forma caracteristicii
%. Forma caracteristicii ![]() este cea din fig.5.37.
este cea din fig.5.37.
Caracteristica factorului
de putere reprezinta variatia factorului de putere in functie de
puterea utila ![]() , atunci cand tensiunea si frecventa tensiunii de
alimentare a statorului raman constante. Forma caracteristicii este cea
din fig.5.37. motorul asincron are si frecventa tensiunii de
alimentare a statorului raman constante. Forma caracteristicii este cea
din fig.5.37. motorul asincron are cos
, atunci cand tensiunea si frecventa tensiunii de
alimentare a statorului raman constante. Forma caracteristicii este cea
din fig.5.37. motorul asincron are si frecventa tensiunii de
alimentare a statorului raman constante. Forma caracteristicii este cea
din fig.5.37. motorul asincron are cos![]() inductiv si la mersul in gol are valoarea cea mai
mica, in jur de 0,2
inductiv si la mersul in gol are valoarea cea mai
mica, in jur de 0,2![]() . La functionarea in sarcina cos
. La functionarea in sarcina cos![]() creste, atingand valoarea maxima la
functionarea cu sarcina nominala.
creste, atingand valoarea maxima la
functionarea cu sarcina nominala.
S-a aratat ca la pornirea momentului cuplului
motor trebuie sa fie mai mare decat momentul cuplului rezistent ![]() . Marimea curentului de pornire absorbit de la
reteaua de alimentare este in general de (5
. Marimea curentului de pornire absorbit de la
reteaua de alimentare este in general de (5![]() )I
)I![]() si din aceasta cauza se impun anumite
conditii,la pornire. Datorita socului de curent la pornire,
exista consecinte neplacute atat pentru motorul
si din aceasta cauza se impun anumite
conditii,la pornire. Datorita socului de curent la pornire,
exista consecinte neplacute atat pentru motorul  propriu-zis (datorita solicitarii termice a acestuia), cat
mai ales pentru reteaua de alimentare si protectia motorului.
Exista mai multe metode de pornire si anume:
propriu-zis (datorita solicitarii termice a acestuia), cat
mai ales pentru reteaua de alimentare si protectia motorului.
Exista mai multe metode de pornire si anume:
a)
Pornirea prin cuplarea directa a statorului la reteaua de alimentare. Aceasta metoda
se aplica in general numai la motoarele asincronice trifazate cu rotorul
in scurtcircuit cu o putere nominala mica in comparatie cu
puterea pe care o poate suporta reteaua la care se conecteaza
motorul. Exista o relatie empirica cu ajutorul careia se
poate aprecia daca un motor de putere nominala P![]() poate fi pornit sau nu prin cuplare directa la o
retea, care poate suporta o putere instalata P
poate fi pornit sau nu prin cuplare directa la o
retea, care poate suporta o putere instalata P![]() si anume:
si anume:
![]() (5.37)
(5.37)
Pentru
raportul ![]() se ia valoarea 5,5
se ia valoarea 5,5![]() 6,5. Daca conditia (5.37) este indeplinita,
motorul poate fi pornit prin cuplare directa (de ex.: P
6,5. Daca conditia (5.37) este indeplinita,
motorul poate fi pornit prin cuplare directa (de ex.: P![]() =10 kw, P
=10 kw, P![]() =100kw, rezulta
=100kw, rezulta ![]() =3,25, deci nu este indeplinita conditia si motorul
nu poate fi pornit prin cuplare directa la retea).
=3,25, deci nu este indeplinita conditia si motorul
nu poate fi pornit prin cuplare directa la retea).
b)
Pornirea cu tensiune de alimentare redusa permite micsorarea curentului I![]() pana la valori convenabile. Reducerea tensiunii de
alimentare se poate realiza fie prin introducerea pe fiecare faza a unor
rezistente chimice sau bobine, pentru producerea unor caderi de
tensiune, astfel incat sa se micsoreze tensiunile aplicate infasurarilor
statorice (fig.5.38) si dupa pornire acestea se scot din circuit (se
inchide intrerupatorul K
pana la valori convenabile. Reducerea tensiunii de
alimentare se poate realiza fie prin introducerea pe fiecare faza a unor
rezistente chimice sau bobine, pentru producerea unor caderi de
tensiune, astfel incat sa se micsoreze tensiunile aplicate infasurarilor
statorice (fig.5.38) si dupa pornire acestea se scot din circuit (se
inchide intrerupatorul K![]() ) , fie prin intercalarea unui autotransformator trifazat
coborator de tensiune (fig.5.39), care dupa pornirea motorului se scoate
din functiune (prin inchiderea intrerupatorului
) , fie prin intercalarea unui autotransformator trifazat
coborator de tensiune (fig.5.39), care dupa pornirea motorului se scoate
din functiune (prin inchiderea intrerupatorului ![]() si deschiderea
lui
si deschiderea
lui ![]() ).
).
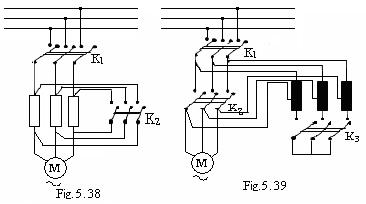 Aceste metode de pornire au dezavantajul
ca la pornire momentul cuplului motor este micsorat cu patratul
micsorarii tensiunii, iar in cazul folosirii unui autotransformator
trifazat, acesta mareste costul instalatiei.
Aceste metode de pornire au dezavantajul
ca la pornire momentul cuplului motor este micsorat cu patratul
micsorarii tensiunii, iar in cazul folosirii unui autotransformator
trifazat, acesta mareste costul instalatiei.
c) Pornirea cu ajutorul unui comutator stea-triunghi (fig.5.40). acest sistem de pornire se poate face numai pentru motoarele care functioneaza cu conexiunea infasurarilor statorului in triunghi. La pornire comutatorul stea-triunghi se da pe pozitia stea. In felul acesta conexiunea infasurarilor statorului fiind in stea, intensitatea curentului la pornire va fi de trei ori mai mica decat in cazul pornirii cu conexiunea in triunghi. Dupa ce rotorul a pornit si turatia lui este apropiata de cea normala, comutatorul Km se da pe pozitia triunghi. In felul acesta motorul va functiona in regim normal, cu infasurarile conectate in triunghi.
Dezavantajul
acestei metode consta in faptul ca, la pornire, tensiunea pe
faza fiind micsorata de ![]() de ori, momentul
cuplului motor este de trei ori micsorat si deci motorul nu poate fi
pornit sub sarcina.
de ori, momentul
cuplului motor este de trei ori micsorat si deci motorul nu poate fi
pornit sub sarcina.
d) Pornirea cu ajutorul unui reostat de pornire
 Aceasta
metoda se aplica numai la motoarele cu rotorul bobinat. La periile
colectoare care calca pe inele, se leaga un reostat trifazat conectat
in stea (fig.5.41). La pornire se
intercaleaza intreaga rezistenta a reactantului in circuitul
infasurarii statorului. Pe masura ce turatia creste
Aceasta
metoda se aplica numai la motoarele cu rotorul bobinat. La periile
colectoare care calca pe inele, se leaga un reostat trifazat conectat
in stea (fig.5.41). La pornire se
intercaleaza intreaga rezistenta a reactantului in circuitul
infasurarii statorului. Pe masura ce turatia creste ![]() se
micsoreaza pana la scurtcircuitare. La unele motoare (de putere
mica), exista un dispozitiv care scurtcircuiteaza cele trei
inele colectoare si totodata ridica periile de pe inele in
scopul micsorarii pierderilor prin frecare si a uzurii inutile a
periilor.
se
micsoreaza pana la scurtcircuitare. La unele motoare (de putere
mica), exista un dispozitiv care scurtcircuiteaza cele trei
inele colectoare si totodata ridica periile de pe inele in
scopul micsorarii pierderilor prin frecare si a uzurii inutile a
periilor.
Pornirea
motorului cu ajutorul reostatului de pornire prezinta avantajul ca
intensitatea curentului I![]() este micsorata pana la valoarea (1,5
este micsorata pana la valoarea (1,5![]() 2)I
2)I![]() , iar momentul cuplului motor este mare, adica motorul
poate fi pornit poate fi pornit sub sarcina.
, iar momentul cuplului motor este mare, adica motorul
poate fi pornit poate fi pornit sub sarcina.
S-a
aratat , ca alunecarea pentru
care cuplul motor este maxim depinde direct proportional de
rezistenta chimica R![]() a circuitului rotoric si ca valoarea momentului
cuplului maxim nu depinde de R
a circuitului rotoric si ca valoarea momentului
cuplului maxim nu depinde de R![]() .
.
Curbele de variatie ale momentului
cuplului motor in functie de alunecare, pentru diverse valori ale
rezistentei R![]() sunt reprezentate in
fig.5.42 (curba 1 pentru valoarea maxima a rezistentei reostatului R
sunt reprezentate in
fig.5.42 (curba 1 pentru valoarea maxima a rezistentei reostatului R![]() si curba 4 pentru scurtcircuitarea acestuia ). Se
observa ca in timpul pornirii valoarea maxima a momentului cuplului motor
ramane aceeasi si ca variatia M(s) se face dupa curbele
figurate cu linie continua, daca micsorarea rezistentei se
face in momentul cand aceste curbe se intersecteaza. Punctul A corespunde
scurtcircuitarii reostatului de pornire. Portiunile din curbe
figurate cu linie intrerupta corespund functionarii motorului cu
si curba 4 pentru scurtcircuitarea acestuia ). Se
observa ca in timpul pornirii valoarea maxima a momentului cuplului motor
ramane aceeasi si ca variatia M(s) se face dupa curbele
figurate cu linie continua, daca micsorarea rezistentei se
face in momentul cand aceste curbe se intersecteaza. Punctul A corespunde
scurtcircuitarii reostatului de pornire. Portiunile din curbe
figurate cu linie intrerupta corespund functionarii motorului cu
![]() (r
(r![]() = rezistenta chimica a unei faze a
infasurarii rotorului), R
= rezistenta chimica a unei faze a
infasurarii rotorului), R![]() avand o valoare oarecare din rezistenta reostatului de
pornire.
avand o valoare oarecare din rezistenta reostatului de
pornire.
Problema reglajului de viteza are o mare importanta practica, intrucat de foarte multe ori este necesar sa se faca o variatie in limite largi. Metodele de reglaj a vitezei motorului asincron sunt:
a)
 Reglajul vitezei prin
schimbarea numarului de poli Se stie ca turatia de sincronism
n
Reglajul vitezei prin
schimbarea numarului de poli Se stie ca turatia de sincronism
n![]() este 60
este 60 ![]() si deci daca se schimba numarul de
perechi de poli se va schimba si turatia n
si deci daca se schimba numarul de
perechi de poli se va schimba si turatia n![]() de sincronism si ca urmare, se va schimba si
viteza de rotatie n
de sincronism si ca urmare, se va schimba si
viteza de rotatie n![]() a rotorului. In acest mod se obtine un reglaj de
viteza in trepte. De cele mai multe ori se obtine un reglaj in
doua trepte, adica cu doua turatii de sincronism.
a rotorului. In acest mod se obtine un reglaj de
viteza in trepte. De cele mai multe ori se obtine un reglaj in
doua trepte, adica cu doua turatii de sincronism.
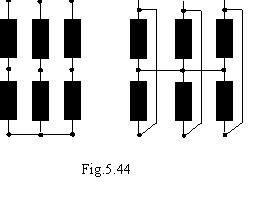
Schimbarea numarului de perechi
de poli se poate face fie prin utilizarea pe stator a doua
infasurari trifazate distincte, fiecare pentru un anumit
numar de poli, fie prin utilizarea unei singure infasurari
si conectarea diferita a diferitelor ei parti componente.
Prima solutie este, evident, mai putin economica, a doua
solutie este ilustrata in fig.5.43 unde s-a prezentat schematic numai
infasurarea unei faze a statorului, compusa din doua bobine
(sectiuni), in a) pentru p=2, sectiunile finale fiind legate in serie
si in b) pentru p=1, sectiunile fiind legate in paralel. Legarea in
serie sau in paralel a sectiunilor trebuie sa se faca simultan
pe toate cele trei faze ale infasurarii statorului (fig.5.44).
Pentru f![]() = 50 Hz va rezulta o turatie de sincronism de 3000
rot/min. pentru p=1, sau 1500 rot/min. pentru p=2.
= 50 Hz va rezulta o turatie de sincronism de 3000
rot/min. pentru p=1, sau 1500 rot/min. pentru p=2.
 Necesitatea schimbarii legaturilor dintre diferite
parti componente ale infasurarilor statorice (si
rotorice, in cazul motoarelor cu rotorul bobinat), conduce la complicatii
constructive si din aceasta cauza motoarele cu doua
turatii (sau trei) sunt scumpe fata de cele cu o singura
turatie.
Necesitatea schimbarii legaturilor dintre diferite
parti componente ale infasurarilor statorice (si
rotorice, in cazul motoarelor cu rotorul bobinat), conduce la complicatii
constructive si din aceasta cauza motoarele cu doua
turatii (sau trei) sunt scumpe fata de cele cu o singura
turatie.
b)Reglajul vitezei prin variatia frecventei tensiunii de alimentare. Aceasta metoda permite o reglare continua si in limite largi a turatiei motoarelor asincrone, necesitand in schimb, instalatii speciale pentru modificarea frecventei ceea ce mareste pretul de cost al utilajului. Acesta nu constituie un impediment pentru utilizarea ei, acolo unde se preteaza. Pentru obtinerea unei frecventei variabile se folosesc convertizoare statice de frecventa.
c)Reglajul vitezei prin introducerea unor rezistente in circuitul rotoric. Aceasta metoda se poate aplica numai la motoarele cu rotorul bobinat, asa cum se indica in fig.5.41. La cuplul constant motorul se roteste cu o alunecare cu atat mai mare cu cat R2 este mai mare, adica cu cat rezistenta introdusa din Rp in circuitul rotorului este mai mare.
Aceasta metoda de reglaj nu este economica, deoarece in rezistenta chimica introdusa suplimentar in circuitul rotoric, mai ales la alunecari mari, deci la turatii mici, se pierde prin efect Joule-Lenz o cantitate importanta de energie, ceea ce micsoreaza randamentului motorului.
Se remarca deci ca motorul asincron trifazat permite un reglaj de viteza, insa neeconomic sau cu investitii sporite.
Inversarea sensului de rotatie se realizeaza schimband doua faze intre ele. Prin inversarea a doua faze se va schimba sensul de rotatie a campului magnetic invartitor statoric si deci se va schimba si sensul de rotatie al rotorului. Schimbarea a doua faze se realizeaza schimband intre ele doua legaturi de la reteaua de alimentare sau de la motor.
Motorul asincron
monofazate se utilizeaza in general pentru actionari de
mica putere (cca.30![]() 200 W) si la turatia aproximativ constanta.
200 W) si la turatia aproximativ constanta.
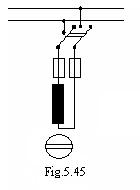 Statorul motorului asincron monofazat se construieste
la fel ca la motorul asincron trifazat, cu deosebire ca in crestaturi
se introduc conductoarele unei infasurari monofazate. Rotorul se construieste, de cele mai multe ori,
in scurtcircuit. Schema electrica a motorului asincron monofazat este
data in fig.5.45.
Statorul motorului asincron monofazat se construieste
la fel ca la motorul asincron trifazat, cu deosebire ca in crestaturi
se introduc conductoarele unei infasurari monofazate. Rotorul se construieste, de cele mai multe ori,
in scurtcircuit. Schema electrica a motorului asincron monofazat este
data in fig.5.45.
Principiul de functionare a motoru-lui asincron monofazat.
Sa consideram ca rotorul se
invarteste cu viteza unghiulara ![]() .Curentul alternativ monofazat care strabate
infasurarea statorului, va produce un camp magnetic pulsativ, care
poate fi descompus in doua campuri invartitoare: unul in acelasi sens
cu rotorul, numit camp direct si al doilea in sens invers, viteza
unghiulara a celor doua campuri fiind aceeasi
.Curentul alternativ monofazat care strabate
infasurarea statorului, va produce un camp magnetic pulsativ, care
poate fi descompus in doua campuri invartitoare: unul in acelasi sens
cu rotorul, numit camp direct si al doilea in sens invers, viteza
unghiulara a celor doua campuri fiind aceeasi ![]() cs.
cs.
Alunecarea rotorului, fata de campul direct, va fi:
![]() (5.38)
(5.38)
iar fata de campul invers va fi:
![]() (5.39)
(5.39)
Frecventa campului rotoric indus de campul direct va fi deci f21=sf1, la fel ca la motorul asincron trifazat. Frecventa curentului rotoric indus insa de campul magnetic invers se deduce in mod analog, adica:
![]() sau
sau ![]()
si rezulta:
![]() sau
sau ![]()
Dar a+a'=2 (din relatia 5.38 si 5.39) si deci:
f211=(2-a)f1 (5.40)
In circuitul rotoric se induc deci curenti de frecvente diferite si anume: sf1 si (2-s)f1. corespunzator celor doua campuri magnetice invartitoare, asupra rotorului se vor exercita doua cupluri distincte MI si MII, de sens contrar, astfel incat cuplul rezultant va fi:
 ,
,
La pornire, cand a=1, frecventa curentilor din infasurarea rotorica va fi aceeasi, adica:
![]() ,
,
deci si cele doua cupluri vor fi
egale, iar cuplul rezultant va fi zero. Rezulta ca motorul nu poate
porni din starea de repaus. Daca intr-un mod oarecare (de exemplu printr-un
impuls manual) se imprima rotorului o turatie initiala, va
rezulta ![]() si
si ![]() deci cuplul rezultant
va fi diferit de zero; rotorul va continua sa se invarteasca in
sensul corespunzator vitezei initiale (daca cuplul motor
rezultant este mai mare decat cuplul rezistent de la arbore).
deci cuplul rezultant
va fi diferit de zero; rotorul va continua sa se invarteasca in
sensul corespunzator vitezei initiale (daca cuplul motor
rezultant este mai mare decat cuplul rezistent de la arbore).
 In concluzie, motorul asincron monofazat dezvolta un cuplu motor
numai daca rotorul are o viteza initiala. Aceasta
viteza initiala nu se imprima manual, ci pe cale electromagnetica
si anume utilizand o infasurare suplimentara, numita
infasurare de pornire, care se pune pe stator, decalata
fata de infasurarea principala cu un unghi de 90o
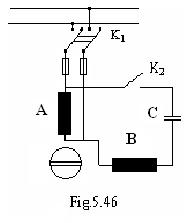
(fig.5.46). Daca se leaga un condensator in serie cu
infasurarea de pornire, a carui capacitate C se alege in
asa fel incat curentul ce strabate infasurarea de pornire
sa fie decalat inainte cu 90o fata de curentul ce
strabate infasurarea principala, atunci se va forma un
sistem bifazat de curenti care vor produce un singur camp magnetic
invartitor. Deci inchizand intrerupatoarele K2 si K1
motorul va porni ca motor bifazat, iar dupa ce turatia rotorului a
crescut suficient, intrerupatorul K2 se deschide si
motorul continua sa se invarteasca ca motor monofazat.
Infasurarea de pornire este dimensionata sa
functioneze numai la pornire si din aceasta cauza nu se
admite mentinerea ei in circuit.
In concluzie, motorul asincron monofazat dezvolta un cuplu motor
numai daca rotorul are o viteza initiala. Aceasta
viteza initiala nu se imprima manual, ci pe cale electromagnetica
si anume utilizand o infasurare suplimentara, numita
infasurare de pornire, care se pune pe stator, decalata
fata de infasurarea principala cu un unghi de 90o
(fig.5.46). Daca se leaga un condensator in serie cu
infasurarea de pornire, a carui capacitate C se alege in
asa fel incat curentul ce strabate infasurarea de pornire
sa fie decalat inainte cu 90o fata de curentul ce
strabate infasurarea principala, atunci se va forma un
sistem bifazat de curenti care vor produce un singur camp magnetic
invartitor. Deci inchizand intrerupatoarele K2 si K1
motorul va porni ca motor bifazat, iar dupa ce turatia rotorului a
crescut suficient, intrerupatorul K2 se deschide si
motorul continua sa se invarteasca ca motor monofazat.
Infasurarea de pornire este dimensionata sa
functioneze numai la pornire si din aceasta cauza nu se
admite mentinerea ei in circuit.
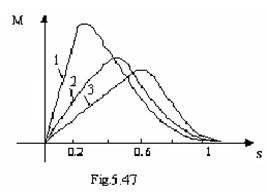
Variatia momentului cuplului motor in functie de alunecare este reprezentata in fig.5.47. Curba 1 reprezinta variatia M(s) pentru o rezistenta R2 egala cu rezistenta infasurarii rotorice; curba 2 corespunde unei rezistente mai mari, adica in circuitul rotoric se introduce o rezistenta suplimentara, iar curba 3 corespunde unei rezistente mai mari decat in cazul curbei 2. Se observa ca in cazul motorului asincron monofazat, o rezistenta suplimentara introdusa in circuitul rotoric micsoreaza valoarea maxima a cuplului motor si mareste alunecarea la care cuplul este maxim (aceasta se explica prin cresterea cuplului creat de campul magnetic invers, odata cu cresterea rezistentei circuitului rotoric).
Motoarele asincrone monofazate au o serie de dezavantaje, in comparatie cu cele trifazate si anume:
- lipsa cuplului motor la pornire;
- capacitatea de suprasarcina este mult mai mica, datorita existentei cuplului motor produs de campul magnetic invers;
- randament mai mic;
- factor de putere mai mic cu 10-12%.
Motorul asincron trifazat poate fi
pornit ca motor asincron monofazat, daca se realizeaza schema din
fig.5.48. Dupa pornire, intrerupatorul K se deschide si motorul
functioneaza numai cu doua faze legate in serie. Aceasta
situatie se poate ivi si in practica, in cazul
functionarii motorului asincron trifazat in doua faze (cazul in
care se arde siguranta de pe o faza). Motorul poate functiona in
continuare daca cuplul rezistent nu-i  prea mare, in caz contrar motorul se arde datorita incalzirii
conductoarelor.
prea mare, in caz contrar motorul se arde datorita incalzirii
conductoarelor.
|
Politica de confidentialitate | Termeni si conditii de utilizare |

Vizualizari: 5307
Importanta: ![]()
Termeni si conditii de utilizare | Contact
© SCRIGROUP 2025 . All rights reserved